!black!70!blue!60
U N IF E I
U N IF E I
Fis403
Fis403
Eduardo Resek
Eduardo Resek
Eletromagnetismo
Eletromagnetismo
1 ∂E
J + c 2 ∂t
µ
0
=
∇×B
c 2 ∂t
0J +
∂E
µ
1
=
B
∇×
2
∂
E
1
2
∇ E− 2 2 = 0
c ∂t
c 2 ∂t 2
∇2 E −
=0
1 ∂2 E
∇·B =
∇·B = 0
0
= − ∂B
∂t
∇×E
= − ∂t
∂B
∂ρ
∇·J+
=0
∂t
∂t
∇·J+
=0
ρ
∂ρ
∇ · E = ²0
²0
∇·E = ρ
∇×E
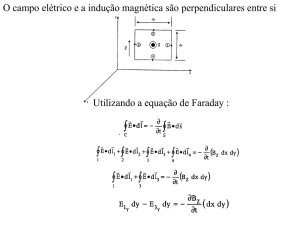
Eletromagnetismo:
Um Curso Introdutório
não tão
Instituto de Física e Química
Universidade Federal de Itajubá
Eduardo O. Resek
2015
Conteúdo
0
Cálculo vetorial: uma revisão
0.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . . .
0.2 Álgebra Vetorial . . . . . . . . . . . . . . . . . . . . . .
0.3 Produtos entre Vetores . . . . . . . . . . . . . . . . . .
0.3.1 Produto Escalar . . . . . . . . . . . . . . . . . .
0.3.2 Produto Vetorial . . . . . . . . . . . . . . . . .
0.4 Cálculo Diferencial e Integral com Vetores . . . . . . .
0.4.1 Derivada Direcional e Gradiente . . . . . . . .
0.4.2 Integração Vetorial . . . . . . . . . . . . . . . .
0.4.3 Divergência . . . . . . . . . . . . . . . . . . . .
0.4.4 Rotacional . . . . . . . . . . . . . . . . . . . . .
0.4.5 Aplicações sucessivas de ∇ . . . . . . . . . . .
0.4.6 Algumas Relações Úteis . . . . . . . . . . . . .
0.5 Sistemas de Coordenadas Curvilíneas . . . . . . . . .
0.5.1 Sistemas de Coordenadas Cilíndricas (ρ, ϕ, z)
0.5.2 Sistemas de Coordenadas Esféricas (r, θ, ϕ) .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
I Eletrostática
1
1
1
2
4
4
4
7
7
8
10
12
14
15
16
17
20
25
A Lei de Coulomb e o Campo Elétrico
1.1 Carga elétrica . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2 Fatos experimentais importantes acerca da carga elétrica
1.3 Natureza dos materiais . . . . . . . . . . . . . . . . . . . . .
1.4 Formas de eletrização . . . . . . . . . . . . . . . . . . . . . .
1.4.1 Eletrização por atrito . . . . . . . . . . . . . . . . .
1.4.2 Eletrização por contato ou condução . . . . . . . .
1.4.3 Eletrização por indução . . . . . . . . . . . . . . . .
1.4.4 Eletrização por irradiação . . . . . . . . . . . . . . .
1.5 Lei de Coulomb . . . . . . . . . . . . . . . . . . . . . . . . .
1.6 Campo elétrico . . . . . . . . . . . . . . . . . . . . . . . . . .
1.7 Princípio da superposição . . . . . . . . . . . . . . . . . . .
1.8 Linhas de força . . . . . . . . . . . . . . . . . . . . . . . . . .
1.9 Distribuições contínuas de cargas . . . . . . . . . . . . . .
1.10 Exemplos de cálculo de campo elétrico . . . . . . . . . . .
iii
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
27
28
28
29
29
29
30
30
30
30
31
32
32
33
34
iv
CONTEÚDO
2
3
4
Eduardo Resek
1.10.1 Um disco carregado não uniformemente . . . . . . . . . .
1.10.2 Linha reta carregada uniformemente . . . . . . . . . . . .
1.10.3 Uma semi-esfera carregada . . . . . . . . . . . . . . . . . .
34
36
37
A Lei de Gauss
2.1 Fluxo de um vetor . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2 Ângulo Sólido . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.3 A Lei de Gauss para o campo elétrico . . . . . . . . . . . . . . . . .
2.3.1 Determinando diretamente o divergente do campo (opcional) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.3.2 Calculando o fluxo de uma carga pontual através de uma
superfície fechada arbitrária . . . . . . . . . . . . . . . . .
2.4 Aplicações da lei de Gauss . . . . . . . . . . . . . . . . . . . . . . .
2.4.1 Simetria esférica . . . . . . . . . . . . . . . . . . . . . . . .
2.4.2 Simetria cilíndrica . . . . . . . . . . . . . . . . . . . . . . .
2.4.3 Simetria cartesiana ou plana . . . . . . . . . . . . . . . . .
2.5 Condutores em equilíbrio eletrostático . . . . . . . . . . . . . . .
43
44
44
45
Potencial eletrostático
3.1 Campos conservativos . . . . . . . . . . . . . . . . . . . . . . . . .
3.1.1 Trabalho de uma força . . . . . . . . . . . . . . . . . . . . .
3.1.2 Campo conservativo e energia potencial . . . . . . . . . .
3.1.3 Campo eletrostático é conservativo! . . . . . . . . . . . . .
3.2 Condutores em Equilíbrio Eletrostático . . . . . . . . . . . . . . .
3.3 O dipolo elétrico . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.3.1 Momento de dipolo elétrico . . . . . . . . . . . . . . . . .
3.3.2 Potencial e campo de um dipolo em pontos distantes . .
3.3.3 Momento de dipolo elétrico de uma distribuição contínua
de cargas . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.3.4 Dipolo num campo externo . . . . . . . . . . . . . . . . . .
3.4 Energia potencial elétrica . . . . . . . . . . . . . . . . . . . . . . .
3.4.1 Sistema de cargas pontuais . . . . . . . . . . . . . . . . . .
3.4.2 Distribuição contínua de cargas . . . . . . . . . . . . . . .
61
62
62
62
63
65
68
68
68
Soluções de problemas em eletrostática
4.1 Equações de Poisson e Laplace . . . . . . . . . . . . . . . . . . . .
4.2 Equações de Poisson e Laplace em uma dimensão . . . . . . . . .
4.3 O método das imagens . . . . . . . . . . . . . . . . . . . . . . . . .
4.4 O Método da Separação de Variáveis . . . . . . . . . . . . . . . . .
4.4.1 Separação de Variáveis em Coordenadas Cartesianas em
Duas Dimensões . . . . . . . . . . . . . . . . . . . . . . . .
4.4.2 Separação de Variáveis em Coordenadas Esféricas com
Simetria Azimutal . . . . . . . . . . . . . . . . . . . . . . .
4.4.3 Separação de Variáveis em Coordenadas Cilíndricas com
potencial independente de z . . . . . . . . . . . . . . . . .
81
81
83
84
85
46
46
48
49
52
53
55
69
70
71
71
73
85
90
93
Unifei
CONTEÚDO
4.4.4
5
6
v
Separação de Variáveis em Coordenadas Cilíndricas . . .
Capacitores
5.1 O que são . . . . . . . . . . . . . . . . . . . . .
5.2 Capacitância . . . . . . . . . . . . . . . . . . .
5.3 Energia armazenada . . . . . . . . . . . . . .
5.4 Associação de capacitores . . . . . . . . . . .
5.4.1 Associação em paralelo . . . . . . . .
5.4.2 Associação em série . . . . . . . . . .
5.5 Calculo de capacitância . . . . . . . . . . . . .
5.5.1 Capacitor de placas planas paralelas
5.5.2 Capacitor de placas esféricas . . . . .
5.5.3 Capacitor de placas cilíndricas . . . .
5.6 Capacitores com dielétricos . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
94
97
97
97
98
98
98
99
100
100
101
101
102
Dielétricos
105
6.1 Polarização . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
6.2 Lei de Gauss na presença de dielétricos . . . . . . . . . . . . . . . 107
6.3 Condições de contorno para o campo elétrico . . . . . . . . . . . 108
II Magnetostática
111
7
8
Corrente Elétrica
7.1 Corrente e densidade de corrente elétrica
7.2 Densidade superficial de corrente . . . .
7.3 A lei de Ohm . . . . . . . . . . . . . . . . .
7.4 Equação da continuidade . . . . . . . . .
7.4.1 A lei de Kirchhoff das correntes .
7.4.2 Tempo de relaxação . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
113
113
115
115
116
117
118
Campo Magnético
8.1 O vetor indução magnética . . . . . . . . . . . . .
8.2 Lei de Biot-Savart . . . . . . . . . . . . . . . . . .
8.2.1 Distribuições volumétricas de correntes
8.2.2 Correntes filamentares . . . . . . . . . .
8.3 Exemplos de aplicação . . . . . . . . . . . . . . .
8.3.1 Espira circular . . . . . . . . . . . . . . . .
8.3.2 Fio retilíneo . . . . . . . . . . . . . . . . .
8.3.3 Fio parabólico . . . . . . . . . . . . . . . .
8.3.4 Espira plana em forma de uma cônica .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
119
119
119
119
120
120
120
121
122
123
Unifei
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Eduardo Resek
Capítulo 0
Cálculo vetorial: uma revisão
Objetivos
Ao final desse capítulo, você deverá ser capaz de:
a) Realizar operações básicas com e entre vetores (multiplicação por um escalar,
soma, produto interno ou escalar, produto externo ou vetorial).
b) Descrever a posição de qualquer ponto no espaço em termos dos três principais sistemas de coordenadas (cartesianas, esféricas e cilíndricas).
c) Identificar e descrever todas as coordenadas e seus respectivos versores de
cada sistema acima.
d) Transformar as coordenadas e versores de um sistema para outro.
e) Escrever os elementos de deslocamento infinitesimais (d r) de cada sistema e
ilustrar geometricamente o significado de cada componente.
f ) A partir das componentes do d r, escrever os elementos de superfície e de
volume para cada tipo de integração possível.
g) Calcular integrais de linha, de superfície e de volume em qualquer dos sistemas de coordenadas, identificando previamente aquele em que o cálculo é
mais simples em cada situação.
h) Definir gradiente de uma função escalar, divergente e rotacional de um vetor,
explicando seu significado geométrico.
i) Enunciar a aplicar os teoremas da divergência de Gauss e da circulação de
Stokes.
0.1 Introdução
No domínio da física elementar (clássica) encontramos diversos tipos de quantidades. Dentre elas, estaremos interessados na distinção entre quantidades
escalares e vetoriais. Visando estritamente nossos interesses futuros, é suficiente
definí-las da seguinte forma:
Escalares: grandezas que são completamente caracterizadas por
suas magnitudes. Exemplos: massa, volume, temperatura, tempo,
etc.
1
2
Capítulo 0 Cálculo vetorial: uma revisão
Vetores: grandezas que são completamente caracterizadas por seus
módulos, direções e sentidos. Exemplos: velocidade, força, aceleração, posição a partir de uma origem fixa, etc.
A partir daí introduzimos os conceitos de campos escalares e vetoriais. Um
campo é basicamente uma função de ponto, isto é, depende da posição no espaço
e/ou no tempo. Assim, campos escalares são especificados fornecendo-se suas
magnitudes em todos os pontos do espaço; campos vetoriais exigem, além do
módulo, a especificação da direção e sentido em todos os pontos do espaço.
Estas definições são não rigorosas e um tanto limitadas, mas serão adequadas
aos nossos propósitos.1
Como todos já estão devidamente familiarizados com a álgebra de escalares,
passamos ao estudo da álgebra vetorial.
0.2 Álgebra Vetorial
Como vimos, um vetor A será completamente caracterizado por seu módulo, direção e sentido. Representamos o módulo de A por |A| ou, às vezes, simplesmente
A. Sendo B e C outros vetores, são válidas as seguintes propriedades:
A+B = B+A
A + (B + C) = (A + B) + C = (A + C) + B = A + B + C,
ou seja, a soma de vetores é definida, resulta em outro vetor e obedece às propriedades da comutatividade e distributividade. Por outro lado, sendo α um escalar
(α ∈ R), αA é também um vetor,
B = αA,
com as seguintes características:
A
â
módulo: |B| = |α| |A|
direção: a mesma de A
½
o mesmo de A, se α > 0
sentido:
o oposto ao de A, se α < 0
Versor (ou vetor unitário) de uma direção é um vetor desta direção cujo módulo
é igual a 1 (um). Dado um vetor A, é fácil determinar o versor de sua direção.
Consideramos:
B = αA,
pois A e seu versor têm a mesma direção, sendo que |B| = 1. Assim,
Figura 0.1 Versor
|B| = |α| |A| = 1 =⇒ |α| =
1
,
|A|
ou α = ±
1
,
|A|
1 Definições rigorosas envolvem propriedades de transformação sob mudança do sistema de
coordenadas.
Eduardo Resek
Unifei
0.2 Álgebra Vetorial
3
½
+ → versor com direção e sentido de A
Denotando por â o
− → versor com direção de A mas sentido oposto.
versor de A, temos então:
A
â =
|A|
sendo
Também podemos escrever
A = |A|â,
isto é, todo vetor pode ser escrito como o produto de seu módulo pelo versor de
sua direção e sentido.
Para melhor visualisarmos os vetores introduzimos um sistema de coordenadas tridimensional, dotado de uma origem O e três eixos perpendiculares entre si,
denotados por x, y, z ou x 1 , x 2 , x 3 . Um vetor V pode então ser especificado por
suas componentes em relação a este sistema de coordenadas:
Vx
= |V| cos α
Vy
= |V| cos β
Vz
= |V| cos γ,
ou,
Vi = |V| cos αi ,
i = 1, 2, 3,
onde α, β, γ, são os ângulos formados por V com os eixos x, y, z, respectivamente
(ou, αi é o ângulo formado por V com o eixo x i , i = 1, 2, 3).
No caso de campos vetoriais, cada uma das componentes é uma função de x,
y, z.
Os versores dos eixos coordenados são comumente denotados pelos seguintes
símbolos:
z
Vz
V
α3
Eixo x: x̂, i, x̂1 , ê1
Eixo y: ŷ, j, x̂2 , ê2
Eixo x: ẑ, k, x̂3 , ê3
α2
α1
ẑ
Vx
x̂
Em termos das componentes, podemos escrever:
V = Vx x̂ + V y ŷ + Vz ẑ
ou
V=
3
X
ŷ
Vy
y
x
Figura 0.2 Componentes do vetor
e ângulos diretores
Vi x̂i
i =1
P
P
Dados dois vetores A = i A i x̂i e B = i B i x̂i e α ∈ R, as propriedades de soma e
multiplicação por escalar se escrevem em termos de componentes, da seguinte
forma:
A + B = (A x + B x )x̂ + (A y + B y ) ŷ + (A z + B z )ẑ
αA = (αA x )x̂ + (αA y ) ŷ + (αA z )ẑ
Unifei
Eduardo Resek
4
Capítulo 0 Cálculo vetorial: uma revisão
0.3 Produtos entre Vetores
São definidos basicamente dois tipos de produtos entre vetores: o produto escalar
e o produto vetorial. Podemos formar ainda outros tipos através de composições
destes dois produtos básicos.
0.3.1 Produto Escalar
Como o nome já deixa a entender, o resultado deste tipo de produto entre dois
vetores A e B dados não será um outro vetor, mas um escalar:
3
X
A·B = A x B x + A y B y + A z B z =
Ai Bi .
i =1
Pode-se mostrar facilmente que esta definição é equivalente a
A·B = |A| |B| cos θ,
onde θ é o menor ângulo entre A e B.
Exercício Demonstre esta equivalência.
Podemos observar que2
A·A = |A|2 = A 2x + A 2y + A 2z =
3
X
i =1
A 2i ≥ 0
A·A = 0 ⇐⇒ A = 0
(αA)·B = A·(αB) = αA·B
A·B = B·A
(A + B)·C = A·C + B·C
0.3.2 Produto Vetorial
Neste tipo de produto entre vetores o resultado é um outro vetor:
¯
¯ x̂
¯
A×B = ¯¯ A x
¯ B
x
ŷ
Ay
By
ẑ
Az
Bz
¯
¯
¯
¯ = (A y B z − A z B y )x̂ + (A z B x − A x B z ) ŷ + (A x B y − A y B x )ẑ
¯
¯
Esta definição, como também pode ser mostrado, é equivalente à conhecida regra
do produto vetorial: C = A×B é um vetor
2 Muitas vezes denominamos a operação A·A de elevar o vetor A ao quadrado.
Eduardo Resek
Unifei
0.3 Produtos entre Vetores
5
(i) perpendicular ao plano formado por A e B (ou seja, perpendicular a ambos os vetores);
(ii) de módulo igual a
C
|C| = |A| |B| sen θ
(iii) de sentido dado pela regra da mão direita: gire A em direção a
B com os dedos da mão direita segundo o menor ângulo entre eles: o
sentido de C = A×B é o indicado pelo polegar desta mão.
A
B
Figura 0.3 Regra da mão direita
Exercícios
1) Os vetores da origem de um sistema de coordenadas até os pontos A, B , C , D
são:
A =
x̂ + ŷ + ẑ
B = 2x̂ + 3 ŷ
C = 3x̂ + 5 ŷ − 2ẑ
D =
ẑ − ŷ
Mostre que as linhas AB e C D são paralelas e determine a razão de seus comprimentos.
2) Mostre que os vetores
A = 2x̂ − ŷ + ẑ,
B = x̂ − 3 ŷ − 5ẑ,
C = 3x̂ − 4 ŷ − 4ẑ
formam os lados de um triângulo retângulo, e determine os demais ângulos deste
triângulo.
3) Mostre que, sendo x̂ i os versores dos eixos x 1 ≡ x, x 2 ≡ y, x 3 ≡ z,
x̂ i ·x̂ j = δi j ,
onde δi j =
½
1, se i = j
.
0, se i 6= j
4) Considere a relação entre três vetores A, B, C:
C = A − B.
Demonstre, quadrando esta relação e interpretando geometricamente o resultado,
a lei dos cossenos.
5) Sendo a um vetor constante e r o vetor posição de um ponto P (x, y, z) genérico
(o vetor que vai da origem do sistema de coordenadas até P ), determine qual a
superfície representada pelas seguintes equações:
Unifei
Eduardo Resek
6
Capítulo 0 Cálculo vetorial: uma revisão
a) (r − a)·a = 0
b) (r − a)·r = 0
6) Mostre que
x̂×x̂ = ŷ× ŷ = ẑ×ẑ = 0
x̂× ŷ = ẑ,
ŷ×ẑ = x̂,
ŷ×x̂ = −ẑ,
ẑ× ŷ = −x̂,
ẑ×x̂ = ŷ
x̂×ẑ = − ŷ
7) Determine um vetor unitário perpendicular simultaneamente aos vetores a e
b, sendo
a = 2i + j − k
b = i−j+k
8) Mostre que
A =
x̂ cos α + ŷ sen α
B =
x̂ cos β + ŷ sen β
são vetores unitários no plano x y formando ângulos iguais a α e β, respectivamente, com o eixo x. Obtenha por meio do produto escalar entre esses dois
vetores, a fórmula para cos(α − β).
α
C
9) Deduza a lei dos senos:
sen α sen β sen γ
=
=
|A|
|B|
|C|
B
β
γ
A
10) A força magnética sofrida por uma partícula de carga q em movimento com
velocidade v num campo de indução magnética B é dada por
F = qv×B.
Figura 0.4 Lei dos senos
Através de três experimentos, encontrou-se que
se v = 1,0 x̂,
F
= 2,0 ẑ − 4,0 ŷ
q
se v = 1,0 ŷ,
F
= 4,0 x̂ − 1,0 ẑ
q
se v = 1,0 ẑ,
F
= 1,0 ŷ − 2,0 x̂
q
(unidades MKS). A partir desses resultados, determine B na região do espaço
considerada.
Eduardo Resek
Unifei
0.4 Cálculo Diferencial e Integral com Vetores
7
0.4 Cálculo Diferencial e Integral com Vetores
Consideraremos agora a extensão das idéias anteriormente introduzidas ao cálculo diferencial e integral. Estudaremos nesta seção os conceitos de derivada
direcional, gradiente, divergente e rotacional de uma função vetorial, bem como
os de integração ao longo de uma trajetória, de uma superfície ou volume, quando
introduziremos as idéias de fluxo e circulação (ou circuitação) de um vetor.
0.4.1 Derivada Direcional e Gradiente
A derivada direcional de uma função escalar φ(x, y, z) no ponto P (x, y, z) nada
mais é que a taxa de variação de φ com respeito à distância, medida segundo
uma certa orientação (direção), no ponto P considerado.
A equação φ(x, y, z) = φ0 sendo φ0 uma constante, representa o lugar geométrico de todos os pontos (x, y, z) tais que φ = φ0 , portanto uma superfície.
Se a partir do ponto P ∈ φ0 imprimirmos um deslocamento ∆r numa direção
qualquer, o ponto P 0 daí resultante pertencerá a uma outra superfície da mesma
família, definida pela equação φ = φ0 + ∆φ. É evidente que, considerando o deslocamento entre as duas superfícies, |∆r| = ∆r será mínimo quando a direção de
∆r for perpendicular à superfície φ = φ0 (θ = 0). De acordo com a definição de
derivada direcional e com a figura 5, podemos então escrever para o ponto P :
φ = φ0 + ∆φ
dφ
: derivada direcional segundo a direção de ∆r, no limite em que ∆r → 0;
dr
dφ
:
derivada direcional segundo a direção de máxima variação de φ.
d r cos θ
Definimos pois o gradiente da função escalar φ no ponto P como o vetor
com as seguintes características:
(i) intensidade: igual à da derivada direcional máxima de φ em P ;
(ii) direção: a da derivada direcional máxima de φ naquele ponto,
ou seja, perpendicular à superfície φ = φ0 que contem o ponto P ;
(iii) sentido: o dos φ crescentes.
P0
∆r
∆r cos θ
θ
n̂
P
φ = φ0
Figura 0.5 Derivada direcional
Representamos o gradiente por ∇φ ou grad φ. Da definição, podemos escrever:
|∇φ| =
dφ
d r cos θ
φ = φ0 + dφ
∇φ
P0
Então:
dφ
dr
= ∇φ·
dr
dr
Esta equação define φ matematicamente. A partir dela, podemos determinar ∇φ
em qualquer sistema de coordenadas em que conheçamos a forma de d `.
Por exemplo, em se tratando de coordenadas cartesianas:
dr
d φ = ∇φ· d r ou
dr =
P
φ = φ0
x̂ d x + ŷ d y + ẑ d z
=⇒ ∇φ·d r = (∇φ)x d x + (∇φ) y d y + (∇φ)z d z
Unifei
θ
n̂
Figura 0.6 Gradiente
Eduardo Resek
8
Capítulo 0 Cálculo vetorial: uma revisão
Por outro lado:
dφ
dr
=
dφ =
∂φ d x ∂φ d y ∂φ d z
+
+
∂x d r ∂y d r ∂z d r
∂φ
∂φ
∂φ
dx +
dy +
dz
∂x
∂y
∂z
Assim, com a definição de ∇φ,
∂φ
∂φ
∂φ
dx +
dy +
d z = (∇φ)x d x + (∇φ) y d y + (∇φ)z d z.
∂x
∂y
∂z
Como as diferenciais d x, d y, d z são independentes, podemos igualar os coeficientes correspondentes às diferenciais nos dois membros desta expressão,
resultando
∂φ
∂φ
∂φ
,
(∇φ) y =
,
(∇φ)z =
,
(∇φ)x =
∂x
∂y
∂z
ou
∂φ
∂φ
∂φ
∇φ =
x̂ +
ŷ +
ẑ.
∂x
∂y
∂z
p
Exemplo Determinar o gradiente de f = f (r ) = f ( x 2 + y 2 + z 2 ).
Solução De acordo com a expressão obtida para ∇ f ,
∇ f (r ) = x̂
Mas
∂ f (r )
∂ f (r )
∂ f (r )
+ ŷ
+ ẑ
∂x
∂y
∂z
∂ f (r ) d f (r ) ∂r
x
d f (r )
d f (r ) x
=
=
=
.
p
∂x
d r ∂x
dr
dr r
x2 + y 2 + z2
Analogamente:
∂ f (r ) d f (r ) y
=
,
∂y
dr r
Então:
∇ f (r ) =
∂ f (r ) d f (r ) z
=
∂z
dr r
df
1
(x x̂ + y ŷ + z ẑ)
dr
r
∇ f (r ) =
df
r̂
dr
0.4.2 Integração Vetorial
Antes de continuarmos a discutir outros aspectos relativos a diferenciação de vetores, é conveniente estudarmos alguns tópicos referentes a integração envolvendo
vetores.
Eduardo Resek
Unifei
0.4 Cálculo Diferencial e Integral com Vetores
9
Integral de Linha
A integral de linha de um campo vetorial F = F(r) = F(x, y, z) desde um ponto a
até um ponto b dados, ao longo de uma trajetória C é um escalar representado
por
Zb
F· d r,
a
C
Fi
onde d r é um vetor deslocamento infinitesimal ao longo da curva C . O cálculo da
integral é efetuado como o de uma integral Riemanniana ordinária: dividimos
a porção da curva C entre a e b em N partes, calculamos Fi ·∆ri para cada uma
delas e somamos tudo, tomando o limite em que N → ∞ (ou ∆ri → 0).
Zb
F· d r =
a C
=
lim
N
X
N →∞ i =1
lim
N
X
N →∞ i =1
θi
b
∆ri
C
Fi · ∆ri =
a
F i ∆r i cos θi
Figura 0.7 Integração ao longo de
um caminho
Em geral, o resultado depende não somente dos pontos extremos a e b, mas
também da curva C que os une.
O caso particular de integração ao longo de uma curva fechada é denotado
de forma especial como
I
F· d r,
C
e denominado circulação ou circuitação de F em torno (ou ao longo) de C . O
resultado pode ou não ser nulo. A classe dos campos vetoriais para os quais a
integral acima se anula para qualquer que seja a curva fechada C é de especial
importância na física matemática.
Integral de Superfície — Fluxo
Dado um campo vetorial F numa região do espaço, definimos o fluxo ΦF do
campo através de uma superfície S como a integral
Z
ΦF = F·n̂ d S
`
S
onde d S é um elemento infinitesimal de área e n̂ um vetor unitário normal a
d S. É claro que ΦF é um escalar. O sentido de n̂ é para fora da superfície, se S
for uma superfície fechada; se S for aberta e finita, ela possui um contorno l ;
por convenção o sentido de n̂ é indicado pelo polegar da mão direita quando os
demais dedos abraçam l no sentido escolhido com positivo para sua orientação
(Figura 8)
O cálculo da integral é semelhante ao caso anteriormente considerado da
integral de linha:
Unifei
n̂
S
Figura 0.8 Regra da mão direita
para o versor normal
Eduardo Resek
10
Capítulo 0 Cálculo vetorial: uma revisão
Z
F·n̂ d S
S
lim
=
N
X
N →∞ i =1
lim
=
N
X
N →∞ i =1
Z
=
S
Fi ·n̂i ∆S i
F i cos θi ∆S i
F cos θ d S
De forma análoga, o fluxo de F através de uma superfície fechada S é denotado
por
I
F·n̂ d S.
S
Integral de Volume
Aqui não há nada de especial: a integral de volume de um vetor F através de um
volume V definido por uma superfície fechada S,
Z
Fdv
V
reduz-se simplesmente a três integrais escalares, uma para cada direção do espaço. Se F for expresso em coordenadas cartesianas, por exemplo, teremos
Z
Z
Z
Z
F d v = x̂ F x d v + ŷ F y d v + ẑ F z d v.
V
V
V
V
0.4.3 Divergência
Um outro importante operador, essencialmente uma derivada, é o operador
divergente. O divergente (ou a divergência) de um campo vetorial F, denotado
por ∇·F ou div F é definido como o limite do fluxo de F através de uma superfície
fechada S por unidade de volume, quando o volume V delimitado por S tende a
zero:
I
1
∇·F = lim
F·n̂ d S
V →0 V S
z
∆z
∆y
P
∆x
z0
y
x0
y0
x
Vemos claramente que o divergente é uma função escalar de ponto (campo
escalar) — ele representa, em cada ponto, o fluxo por unidade de volume que
nasce de um elemento de volume coincidente com o ponto.
A definição acima é independente da escolha do sistema de coordenadas,
podendo pois ser usada para encontrar a forma específica de ∇·F em qualquer
sistema de coordenadas particular. Em coordenadas cartesianas retangulares,
por exemplo, tomamos um elemento de volume ∆v = ∆x ∆y ∆z, localizado no
ponto (x 0 , y 0 , z 0 ). O fluxo ΦF de um campo vetorial F através deste paralelepípedo
Figura 0.10 Elemento de volume
próximo ao ponto P (x 0 , y 0 , z 0 )
Eduardo Resek
Unifei
0.4 Cálculo Diferencial e Integral com Vetores
11
será, desprezando infinitésimos de ordem superior:
I
Z
Z
F ·n̂ d S =
F x (x 0 + ∆x, y, z) d y d z − F x (x 0 , y, z) d y d z
S
Z
Z
+ F y (x, y 0 + ∆y, z) d x d z − F y (x, y 0 , z) d x d z
Z
Z
+ F z (x, y, z 0 + ∆z) d x d y − F z (x, y, z 0 ) d x d y,
De acordo com o teorema de Taylor, desprezando novamente infinitésimos superiores:
∂F x ¯¯
F x (x 0 + ∆x, y, z) = F x (x 0 , y, z) + ∆x
¯
∂x (x0 ,y,z)
∂F y ¯¯
F y (x, y 0 + ∆y, z) = F y (x, y 0 , z) + ∆y
¯
∂y (x,y 0 ,z)
∂F z ¯¯
F z (x, y, z 0 + ∆z) = F z (x, y, z 0 ) + ∆z
,
¯
∂z (x,y,z0 )
de modo que
∇·F =
½ Z
1
∂F x ¯¯
∆x
dy dz
¯
∆v→0 ∆x ∆y ∆z
∂x (x0 ,y,z)
¾
Z
Z
∂F y ¯¯
∂F z ¯¯
d x d z + ∆z
dx dy .
+∆y
¯
¯
∂y (x,y 0 ,z)
∂z (x,y,z0 )
lim
Assim, tomando o limite e simplificando
∇·F =
∂F x ∂F y ∂F z
+
+
∂x
∂y
∂z
Podemos agora enunciar um teorema extremamente importante da análise
vetorial envolvendo o divergente:
Teorema do Divergente (Gauss): a integral do divergente de um campo vetorial
sobre um volume v é igual ao fluxo deste vetor através da superfície S que limita
v:
Z
I
∇·F d v = F·n̂ d S
v
S
Exemplo Determine ∇·r e ∇·[r f (r )].
Solução Aplicando diretamente a expressão encontrada acima,
³ ∂
∂
∂´
∂x ∂y ∂z
∇·r = x̂
+ ŷ
+ ẑ
·(x x̂ + y ŷ + z ẑ) =
+
+
∂x
∂y
∂z
∂x ∂y ∂z
=⇒ ∇·r = 3
Unifei
Eduardo Resek
12
Capítulo 0 Cálculo vetorial: uma revisão
De modo mais genérico:
∂
∂
∂
[x f (r )] +
[y f (r )] + [z f (r )]
∂x
∂y
∂z
∇·[r f (r )] =
x 2 d f (r ) y 2 d f (r ) z 2 d f (r )
+
+
r dr
r dr
r dr
df
= 3 f (r ) + r
.
dr
= 3 f (r ) +
Em particular, se f (r ) = r n−1 , ou seja, r f (r ) = r n ,
∇·(r̂r n ) = 3r n−1 + (n − 1)r n−1 = (n + 2)r n−1 .
Vemos que o divergente se anula para n = 2, fato que será importante futuramente:
³ r̂ ´
∇· 2 = 0, para r 6= 0
r
0.4.4 Rotacional
Outro importante operador diferencial da análise vetorial é o rotacional, denotado por ∇×F ou rot F, quando aplicado a um vetor F. Analogamente ao modo
como definimos o divergente, na seção anterior, por
I
1
n̂·F d S
∇·F = lim
V →0 V S
definimos o rotacional de um campo vetorial F, nas mesmas condições, por:
I
1
∇×F = lim
n̂×F d S
V →0 V S
Esta definição, entretanto, é equivalente, pode-se mostrar, a uma outra que nos
será mais útil: considere no ponto P uma trajetória l fechada e contida num
plano cuja normal é n̂ (o sentido de n̂ é, como sempre, definido pela regra da
mão direita aplicada ao sentido convencionado como positivo para a trajetória l );
a componente do vetor ∇×F na direção de n̂ é então definida como o limite da
relação entre a circulação de F ao longo de l e a área S delimitada por l , quando S
tende a zero:
I
1
n̂·∇×F = lim
F·d r.
S→0 S `
Exercício Mostre a equivalência dessas duas definições.
Podemos determinar as componentes do vetor rotacional de um dado campo
F em qualquer sistema de coordenadas, através de uma das duas definições
apresentadas. Em coordenadas cartesianas o resultado é:
∇×F =
Eduardo Resek
³ ∂F
z
∂y
−
∂F y ´
∂z
x̂ +
³ ∂F
x
∂z
−
³ ∂F y ∂F ´
∂F z ´
x
ŷ +
−
ẑ,
∂x
∂x
∂y
Unifei
0.4 Cálculo Diferencial e Integral com Vetores
13
ou, numa forma mnemônica, como a expansão de um determinante:
¯
¯
¯
¯
∇×F = ¯¯
¯
¯
x̂
∂
∂x
Fx
ŷ
∂
∂y
Fy
ẑ
∂
∂z
Fz
¯
¯
¯
¯
¯
¯
¯
¯
O teorema de Stokes, enunciado a seguir, é também um resultado de importância
na análise vetorial:
Teorema de Stokes: A circulação de um campo vetorial ao longo de uma curva
fechada l é igual à integral de superfície de seu rotacional sobre qualquer superfície limitada pela curva:
I
Z
`
F·d r =
S
∇×F·n̂ d S
¡ ¢
¡ ¢
Exemplo 1 Mostre que ∇× f V = f ∇×V + ∇ f ×V.
Solução De acordo com a expressão para o rotacional,
¯
¯ x̂
¯
¡ ¢ ¯ ∂
∇× f V = ¯¯
¯ ∂x
¯ fV
x
ŷ
∂
∂y
f Vy
ẑ
∂
∂z
f Vz
¯
¯
¯
¯
¯,
¯
¯
¯
assim:
¡ ¡ ¢¢
∇× f V x
∂V y ∂ f
∂( f Vz ) ∂( f V y )
∂Vz ∂ f
−
=f
+
Vz − f
−
Vy =
∂y
∂z
∂y
∂y
∂z
∂z
¶ µ
µ
¶
∂f
∂Vz ∂V y
∂f
+
= f
−
Vz −
Vy =
∂y
∂z
∂y
∂z
¢
¡
¢ ¡
= f ∇×V x + ∇ f ×V x ,
=
de modo que
¡ ¢
¡ ¢
∇× f V = f ∇×V + ∇ f ×V
£
¤
Exemplo 2 Encontre ∇× r f (r ) .
Solução De acordo com a fórmula obtida no exemplo anterior, temos:
£
¤
∇× r f (r ) = f ∇×r + ∇ f ×r.
Mas
¯
¯
¯
¯
∇×r = ¯¯
¯
¯
Unifei
x̂
∂
∂x
x
ŷ
∂
∂y
y
ẑ
∂
∂z
z
¯
¯
¯
¯
¯ = 0,
¯
¯
¯
Eduardo Resek
14
Capítulo 0 Cálculo vetorial: uma revisão
e, além disso,
df
r̂,
dr
donde resulta, levando em conta que r̂×r = 0, que
∇ f (r ) =
£
¤
∇× r f (r ) = 0
0.4.5 Aplicações sucessivas de ∇
Vejamos o que resulta da aplicação sucessiva do operador ∇, de diversas formas e
a diversos tipos de quantidades.
Laplaciano
É, por definição, o divergente do gradiente de uma função escalar φ:
∇2 φ = ∇·∇φ
O laplaciano de um campo escalar resulta numa outra função escalar. Em coordenadas cartesianas, por exemplo, temos
∇2 φ =
∂2 φ ∂2 φ ∂2 φ
+
+
∂x 2 ∂y 2 ∂z 2
Divergente do rotacional
Nesse caso, teremos:
¯
ẑ ¯¯
∂ ¯¯
=
∂z ¯¯
Vz ¯
∂ ³ ∂Vz ∂V y ´ ∂ ³ ∂Vx ∂Vz ´ ∂ ³ ∂V y ∂Vx ´
−
+
−
+
−
∂x ∂y
∂z
∂y ∂z
∂x
∂z ∂x
∂y
¯
¯
¯
¯
∇·∇×V = ∇· ¯¯
¯
¯
x̂
∂
∂x
Vx
ŷ
∂
∂y
Vy
Considerando que V é uma função contínua e lisa das variáveis x, y, z, as suas derivadas segundas com relação a estas variáveis podem ser tomadas em qualquer
ordem, isto é, por exemplo,
∂2Vz
∂2Vz
=
,
∂x∂y ∂y∂x
o mesmo acontecendo com as demais derivadas. Desse modo, resulta que
¯
¯
¯
¯
∇·∇×V = ∇· ¯¯
¯
¯
Eduardo Resek
x̂
∂
∂x
Vx
ŷ
∂
∂y
Vy
ẑ
∂
∂z
Vz
¯
¯
¯
¯
¯=0
¯
¯
¯
Unifei
0.4 Cálculo Diferencial e Integral com Vetores
15
Rotacional do gradiente
Pela expressão para o cálculo do rotacional, temos:
¯
¯
¯
¯
¯
∇×∇φ = ¯¯
¯
¯
¯
x̂
∂
∂x
∂φ
∂x
ŷ
∂
∂y
∂φ
∂y
ẑ
∂
∂z
∂φ
∂z
¯
¯
¯
¯
¯
¯=0
¯
¯
¯
¯
Rotacional do rotacional e gradiente do divergente
Em geral, nenhuma dessas duas operações são nulas, mas existe a seguinte
relação entre elas:
∇×∇×V = ∇∇·V − ∇2 V,
onde o laplaciano de um vetor é o vetor cujas coordenadas cartesianas são os
laplacianos das componentes correspondentes do vetor original:
∇2 V = (∇·∇Vx )x̂ + (∇·∇V y ) ŷ + (∇·∇Vz )ẑ
= ∇2Vx x̂ + ∇2V y ŷ + ∇2Vz ẑ.
Deve-se observar que esta última relação só é válida no sistema de coordenadas
cartesianas. Nos demais sistemas, ∇2 V é definido pela primeira expressão.
Muitas vezes, escrevemos também, simbolicamente,
∇2 V = ∇·∇V.
0.4.6 Algumas Relações Úteis
Fornecemos, a seguir, algumas identidades freqüentemente necessárias no manuseio de expressões em cálculo vetorial.
∇(uv) = u∇v + v∇u
∇·( f V) = f ∇·V + ∇ f ·V
∇·(A×B) = B·∇×A − A·∇×B
¡ ¢
¡ ¢
∇× f V = f ∇×V + ∇ f ×V
I
Z
φn̂ d S = ∇φ d v
S
I
Z
2
v
Unifei
v
φdr =
2
Z
n̂×∇φ d S
S
(ϕ∇ φ − φ∇ ϕ) d v =
I
S
(ϕ∇φ − φ∇ϕ)·n̂ d S
Eduardo Resek
16
Capítulo 0 Cálculo vetorial: uma revisão
Exercícios
11) Mostre que, se A é um vetor constante,
∇(A·r) = A.
12) Mostre que, se ∇×A = 0, então ∇·(A×r) = 0.
13) Se ∇×f 6= 0 mas ∇×(g f) = 0, onde g = g (x, y, z) e f = f(x, y, z), mostre que
f·∇×f = 0.
14) Se A e B são vetores constantes, mostre que ∇(A·B×r) = A×B.
15) Mostre que ∇×(φ∇φ) = 0.
16) Mostre que a integral de linha de um campo F antre dois pontos a e b do esZ b
paço,
F· d r, é independente da trajetória se a condição ∇×F = 0 for satisfeita.
a
0.5 Sistemas de Coordenadas Curvilíneas
Nas primeiras seções, embora tenhamos introduzido o vetor posição radial r,
restringimo-nos quase que inteiramente ao uso de coordenadas cartesianas, cuja
grande vantagem é a sua simplicidade, devida ao fato de serem seus vetores
unitários constantes e os mesmos em todos os pontos do espaço.
Infelizmente nem todos os problemas em física e engenharia se adaptam a
uma solução desenvolvida em um sistema de coordenadas cartesianas. Por exemplo, num problema de força central, tal como a gravitacional ou a eletrostática,
a simetria praticamente exige que façamos uso de um sistema de coordenadas
em que a distância radial seja uma das coordenadas, ou seja, um sistema de
coordenadas esféricas.
A escolha do sistema de coordenadas deve estar portanto, ligada à simetria
presente na situação analisada. Uma escolha adequada sempre facilita enormemente a solução do problema.
Estudaremos basicamente dois tipos de sistemas de coordenadas, por serem
os mais comuns e os mais tratáveis: o sistema de coordenadas esféricas e o de
coordenadas cilíndricas.
Poderíamos desenvolver a teoria de forma a obter expressões genéricas válidas em qualquer sistema de coordenadas curvilíneas, como é feito na maioria
dos livros-texto sobre o assunto, particularizando depois os resultados para os
sistemas de interesse. Não seguiremos essa abordagem por considerarmos que,
analisando cada um deles separadamente e deduzindo ‘in loco’ as expressões
desejadas, podemos obter uma maior familiaridade com o sistema em questão.
Eduardo Resek
Unifei
0.5 Sistemas de Coordenadas Curvilíneas
17
0.5.1 Sistemas de Coordenadas Cilíndricas (ρ, ϕ, z)
A figura 11 ilustra os elementos do sistema de coordenadas cilíndricas. Dado um
ponto P de coordenadas (ρ, ϕ, z), temos as seguintes interpretações:
ρ: distância perpendicular do ponto P ao eixo z (0 ≤ ρ < ∞);
ϕ: ângulo azimutal, isto é, o ângulo formado com o eixo x pela projeção do vetor posição
do ponto P sobre o plano x y (0 ≤ ϕ < 2π);
z: distância de P ao plano x y, ou seja, o mesmo que no sistema de coordenadas cartesianas.
z
Transformação de coordenadas
ẑ
ρ
P
A figura 12 mostra a projeção no plano x y da figura 11. Dela podemos escrever as
seguintes relações entre as coordenadas cilíndricas e as cartesianas:
ϕ̂
r
ρ̂
z
Transformação de coordenadas cilíndricas para cartesianas:
x
= ρ cos ϕ,
y
= ρ sen ϕ,
z
=
z.
y
ϕ
ρ
P0
x
Figura 0.11 Coordenadas cilíndricas e seus versores
y
Transformação de coordenadas cartesianas para cilíndricas:
ρ
ϕ̂
q
x 2 + y 2,
y
ϕ = arctan ,
x
z = z.
=
0 ≤ ρ < ∞,
P
0 ≤ ϕ < 2π,
Transformação dos vetores unitários:
Os vetores unitários dos sistemas de coordenadas curvilíneas não são em geral
constantes, por isso merecem atenção especial quando envolvidos em operações
como derivação e integração. Vejamos como se relacionam os versores do sistema
de coordenadas cilíndricas com os de coordenadas cartesianas:
ρ̂
ϕ
ρ
ϕ
x
ϕ
0
y
x
Figura 0.12 Projeção no plano x y
Versores cartesianos para cilíndricos: Da figura 12, decompondo os versores ρ̂ e ϕ̂ nos eixos x, y, observando que os ângulos indicados na figura são iguais
a ϕ, obtemos:
ρ̂
=
x̂ cos ϕ + ŷ sen ϕ
ϕ̂ = −x̂ sen ϕ + ŷ cos ϕ
ẑ
Unifei
=
ẑ
Eduardo Resek
18
Capítulo 0 Cálculo vetorial: uma revisão
Note que os versores ρ̂, ϕ̂, ẑ formam um sistema triortogonal: o produto escalar
entre qualquer par desses versores (distintos entre si) é nulo e, além disso:
ρ̂×ϕ̂ = ẑ,
ϕ̂×ẑ = ρ̂,
ẑ×ρ̂ = ϕ̂.
Versores cilíndricos para cartesianos: As transformações inversas são também facilmente obtidas e são deixadas como exercício. O resultado é:
x̂
= ρ̂ cos ϕ − ϕ̂ sen ϕ
ŷ
= ρ̂ sen ϕ + ϕ̂ cos ϕ
Vetor posição: O vetor posição de um ponto P genérico do espaço, cujas coordenadas cilíndricas são (ρ, ϕ, z) e cartesianas (x, y, z), pode ser escrito, usando
apenas elementos de coordenadas cilíndricas, com:
r = ρ ρ̂ + z ẑ;
y
dS = dx dy
se expressarmos ρ̂ em termos dos versores cartesianos, teremos a forma mais
adequada para o uso em integrações e derivadas,
r = ρ cos ϕx̂ + ρ sen ϕ ŷ + z ẑ.
Elementos de área e volume
x
Figura 0.13 Elemento de área
cartesiana no plano x y
y
A fim de entendermos mais facilmente como determinar os elementos de volume
e superfície nos sistemas de coordenadas curvilíneas, vamos examinar como eles
são formados no nosso velho sistema de coordenadas cartesianas. O elemento de
área no plano x y, por exemplo, é obtido mantendo z = cte. e imprimindo pequenas variações d x e d y nas coordenadas (x, y) de um ponto P genérico (figura 13).
Temos então construído um elemento de área no plano x y (ou paralelo a ele), ou
seja, num plano z = constante. É claro que
(d S)z=cte = d x d y.
dρ
dS = ρ dρ dϕ
Um elemento de volume é facilmente obtido a partir daí, acrescentando agora
uma variação infinitesimal d z da coordenada z: teremos um pequeno cubo de
arestas d x, d y e d z, cujo volume é
ρ
dϕ
d v = d x d y d z.
ρ dϕ
ϕ
Figura 0.14 Elemento de área
polar no plano x y
x
Em coordenadas cilíndricas basta agora repetirmos o raciocínio, acompanhando a figura 14. No plano z = cte, imprimimos às coordenadas ρ e ϕ variações
infinitesimais d ρ e d ϕ. Obtemos portanto um retângulo infinitesimal cujos lados
são dados por d ρ e ρ d ϕ; sua área será portanto igual a
(d S)z=cte = ρ d ρ d ϕ.
Eduardo Resek
Unifei
0.5 Sistemas de Coordenadas Curvilíneas
19
Podemos igualmente escrever os elementos de área obtidos quando mantemos
cada uma das demais coordenadas constantes e permitimos às outras uma pequena variação. Temos:
(d S)ρ=cte = ρ d ϕ d z,
correspondente a ρ = cte (elemento de área lateral do cilindro) e
(d S)ϕ=cte = d ρ d z.
correspondente a ϕ = cte.
O elemento de volume, como a essa altura já deve ser óbvio, é conseguido
juntando-se, por exemplo, a variação d z àquela correspondente a z = cte:
dv = ρ dρ dϕdz
Forma dos operadores vetoriais
Para encerrar, listamos a seguir as formas assumidas no sistema de coordenadas
cilíndricas pelos diversos operadores diferenciais vetoriais estudados:
Gradiente
∇φ =
Divergente
∇·V =
∂φ
1 ∂φ
∂φ
ρ̂ +
ϕ̂ +
ẑ
∂ρ
ρ ∂ϕ
∂z
1 ∂
1 ∂Vϕ ∂Vz
(ρVρ ) +
+
ρ ∂ρ
ρ ∂ϕ
∂z
Rotacional
¯
¯
¯
1 ¯¯
∇×V = ¯
ρ¯
¯
ρ̂
∂
∂ρ
Vρ
ρ ϕ̂
∂
∂ϕ
ρVϕ
ẑ
∂
∂z
Vz
¯
¯
¯
¯
¯
¯
¯
¯
Laplaciano
∇2 φ =
1 ∂ ³ ∂φ ´ 1 ∂2 φ ∂2 φ
ρ
+ 2
+
ρ ∂ρ ∂ρ
ρ ∂ϕ2 ∂z 2
Laplaciano de um vetor
(∇2 V)ρ
(∇2 V)ϕ
(∇2 V)z
Unifei
1
2 ∂Vϕ
Vρ − 2
2
ρ
ρ ∂ϕ
1
2 ∂Vρ
= ∇2Vϕ − 2 Vϕ + 2
ρ
ρ ∂ϕ
= ∇2Vρ −
= ∇2Vz
Eduardo Resek
20
Capítulo 0 Cálculo vetorial: uma revisão
0.5.2 Sistemas de Coordenadas Esféricas (r, θ, ϕ)
A figura 15 ilustra os elementos de coordenadas esféricas, r, θ, ϕ de um ponto P
genérico do espaço, que possuem os seguintes significados:
r:
módulo do vetor posição do ponto, ou seja, a distância do ponto P à origem do sistema
de coordenadas (0 ≤ r < ∞);
θ: ângulo que o raio vetor (vetor posição) de P faz com o semieixo positivo z (0 ≤ θ ≤ π),
também conhecido como ângulo polar;
ϕ: ângulo azimutal, isto é, o ângulo formado com o eixo x pela projeção do vetor posição
do ponto P sobre o plano x y (0 ≤ ϕ < 2π), ou seja, o mesmo significado que no sistema
de coordenadas cilíndricas;
z
Transformação de coordenadas
r̂
P 00
ϕ̂
P
r
θ
x
M
ϕ
y
θ̂
y
P0
x
Figura 0.15 Coordenadas esféricas
Na figura 15 podemos extrair dois triângulos retan̂gulos que nos possibilitarão
escrever as relações ligando o sistema de coordenadas esféricas e o de coordenadas cartesianas; são eles o triângulo OP P 00 , onde O é a origem do sistema de
coordenadas, que é retângulo em P 00 (ou OP P 0 , retângulo em P 0 , que é semelhante a OP P 00 ), e o triângulo OM P 0 , retângulo em M . A figura 16 mostra esses
dois triângulos. Note que OM P 0 jaz no plano x y, enquanto OP P 00 fica no plano
ϕ = cte e que, além disso, OP 0 = P P 00 coincide com a definição do elemento ρ das
coordenadas cilíndricas.
Transformação de coordenadas esféricas para cartesianas: Da figura 16(b)
vemos que
x
= OP 0 cos ϕ,
y
= OP 0 sen ϕ,
enquanto, da figura 16(a),
z
= r cos θ,
P P 00
= r sen θ
Como OP 0 = P P 00 , as relações desejadas são
Eduardo Resek
x
= r sen θ cos ϕ,
y
= r sen θ sen ϕ,
z
= r cos θ,
Unifei
0.5 Sistemas de Coordenadas Curvilíneas
21
ρ
P 00
P
Transformação de coordenadas cartesianas para esféricas: Do ∆OP P 00 , o
teorema de Pitágoras fornece
z
2
r 2 = P P 00 + z 2 ;
r
(a)
θ
o mesmo teorema, aplicado a ∆OM P , conduz a
0
2
2
OP 0 = P P 00 = x 2 + y 2 ,
O
de modo que
P0
r 2 = x 2 + y 2 + z 2,
resultado que poderíamos obter diretamente a partir do produto escalar de r
por ele mesmo. Ainda, cada uma das figuras fornece um dos ângulos θ e ϕ; as
expressões finais são:
q
x 2 + y 2 + z 2,
0 ≤ r < ∞,
r =
z
θ = arccos ,
0 ≤ θ ≤ π,
r
y
ϕ = arctan ,
0 ≤ ϕ < 2π.
x
(b)
ρ
O
y
ϕ
x
M
Figura 0.16 Transformações de
coordenadas
Transformação dos vetores unitários:
Versores cartesianos para esféricos: Da figura 15 percebemos que o versor
ϕ̂ é sempre paralelo ao plano x y, não possuindo componente na direção do eixo
z. Percebemos também que este vetor é exatamente aquele que já determinamos
quando estudamos o sistema de coordenadas cilíndricas e, portanto já temos
pronta sua expressão de transformação:
ϕ̂ = −x̂ sen ϕ + ŷ cos ϕ.
O versor r̂ é facilmente encontrado lembrando que
r̂ =
r x
y
z
= x̂ + ŷ + ẑ
r
r
r
r
Assim, usando as expressões obtidas para x, y e z,
r̂ = sen θ cos ϕ x̂ + sen θ sen ϕ ŷ + cos θ ẑ.
O meio mais fácil de determinar θ̂ é observando que, como os três versores
formam um sistema triortogonal,
¯
¯
x̂
ŷ
ẑ
¯
¯
cos ϕ
0
θ̂ = ϕ̂×r̂ = ¯ − sen ϕ
¯ sen θ cos ϕ sen θ sen ϕ cos θ
Unifei
¯
¯
¯
¯
¯
¯
Eduardo Resek
22
Capítulo 0 Cálculo vetorial: uma revisão
Assim, desenvolvendo e simplificando,
θ̂ = cos θ cos ϕ x̂ + cos θ sen ϕ ŷ − sen θ ẑ
Como já foi observado, os versores r̂, ϕ̂, θ̂ formam um sistema triortogonal: o
produto escalar entre qualquer par desses versores (distintos entre si) é nulo e,
além disso:
r̂×θ̂ = ϕ̂,
ϕ̂×r̂ = θ̂,
θ̂×ϕ̂ = r̂.
Versores esféricos para cartesianos: As transformações inversas são também facilmente obtidas e são deixadas como exercício. O resultado é:
x̂ =
θ − sen ϕ ϕ̂
ϕ
sen θ cos ϕ r̂ + cos θ cos ϕ θ̂
ŷ =
θ + cos ϕ ϕ̂
ϕ
sen θ sen ϕ r̂ + cos θ sen ϕ θ̂
θ
ẑ = cos θ r̂ − sen θ θ̂
Vetor posição: O vetor posição de um ponto P genérico do espaço, cujas
coordenadas esféricas são (r, θ, ϕ) e cartesianas (x, y, z), pode ser escrito, usando
apenas elementos de coordenadas esféricas, com:
r = r r̂,
pois r é um dos elementos de coordenadas esféricas. Expressando em termos dos
versores cartesianos, teremos a forma mais adequada para o uso em integrações
e derivadas,
r = r sen θ cos ϕ x̂ + r sen θ sen ϕ ŷ + r cos θ ẑ.
Elementos de área e volume
z
r dθ
r sin θ dϕ
dθ
dϕ
y
Em coordenadas esféricas o elemento de superfície mais importante é aquele
obtido mantendo r constante e permitindo a θ e ϕ variarem infinitesimalmente
(figura 15). Da figura podemos determinar os lados do retângulo infinitesimal
assim formado: mantendo inicialmente ϕ fixo e variando θ de d θ, obtemos um
arco de comprimento r d θ. Se, por outro lado, mantivermos θ fixo e variarmos ϕ
de d ϕ, teremos um arco de uma circunferência de raio r sen θ, cujo comprimento
é portanto r sen θ d ϕ. Logo, a área do elemento considerado será
(d S)r =cte = r 2 sen θ d ϕ d θ.
x
Figura 0.17 Elemento de superfície
O elemento de volume é então facilmente encontrado a partir daí, bastando
permitir agora também ao raio vetor uma pequena variação d r : teremos um
cubo infinitesimal de lados d r , r sen θ d ϕ e r d θ, cujo volume é
d v = r 2 sen θ d r d θ d ϕ
Eduardo Resek
Unifei
0.5 Sistemas de Coordenadas Curvilíneas
23
Podemos, ainda, novamente escrever os elementos de área obtidos quando
mantemos cada uma das demais coordenadas constantes e permitimos às outras
uma pequena variação. Temos:
(d S)θ=cte = r sen θ d r d ϕ
correspondente a r = cte (elemento de área lateral de um cone com vértice na
origem semi-abertura θ) e
(d S)ϕ=cte = r d r d θ.
correspondente a ϕ = cte.
Forma dos operadores vetoriais
Em coordenadas esféricas os operadores diferenciais vetoriais estudados assumem a seguinte forma:
Gradiente
∇φ =
1 ∂φ
∂φ
1 ∂φ
r̂ +
θ̂ +
ϕ̂
∂r
r ∂θ
r sen θ ∂ϕ
Divergente
·
¸
∂Vϕ
1
∂ 2
∂
∇·V = 2
sen θ (r Vr ) + r
(sen θVθ ) + r
r sen θ
∂r
∂θ
∂ϕ
Rotacional
¯
¯
¯
¯
1
¯
∇×V = 2
r sen θ ¯¯
¯
r̂
∂
∂r
Vr
r θ̂
∂
∂θ
r Vθ
r sen θ ϕ̂
∂
∂ϕ
r sen θVϕ
¯
¯
¯
¯
¯
¯
¯
¯
Laplaciano
·
¸
1
∂ 2 ∂φ
∂
∂φ
1 ∂2 φ
∇ φ= 2
sen θ (r
)+
(sen θ
)+
r sen θ
∂r
∂r
∂θ
∂θ
sen θ ∂ϕ2
2
É interessante notar que
1 ∂ ³ 2 ∂φ ´ 1 ∂2
r
=
(r φ)
r 2 ∂r
∂r
r ∂r 2
Unifei
Eduardo Resek
24
Capítulo 0 Cálculo vetorial: uma revisão
Laplaciano de um vetor
(∇2 V)r = ∇2Vr −
∂Vϕ
2 ∂Vr
2 cos θ
2
2
Vr − 2
− 2
Vθ − 2
,
2
r
r ∂θ
r sen θ
r sen θ ∂ϕ
(∇2 V)θ = ∇2Vθ −
(∇2 V)ϕ = ∇2Vϕ −
1
r 2 sen2 θ
1
r 2 sen2 θ
Vθ +
Vϕ +
2 ∂Vr
2 cos θ ∂Vϕ
− 2
,
2
r ∂θ
r sen2 θ ∂ϕ
2
r 2 sen θ
∂Vr
2 cos θ ∂Vθ
+ 2
,
∂ϕ r sen2 θ ∂ϕ
Estas expressões para ∇2 V são inegavelmente confusas, mas algumas vezes são
necessárias (não há uma garantia expressa de que a natureza seja sempre simples).
Na verdade, não a utilizaremos no decorrer do nosso curso; apresentâmo-la aqui
apenas por questão de completeza.
(−a, a)
y
(a, a)
x
Exercícios
17) O campo elétrico de uma partícula carregada localizada na origem do sistema
de coordenadas é da forma:
E=
(−a, −a)
(a, −a)
Figura 0.18 Exercício 17
K
r,
r3
K = cte.
a) Calcule o fluxo de E através da superfície esférica de raio a com centro na
origem.
b) Determine ∇·E e integre este resultado sobre o volume definido pela superfície
esférica, comparando os resultados. Você já esperava por isto?
c) Calcule a integral de linha do vetor E ao longo da trajetória no plano x y mostrada na figura.
d) Use o teorema de Stokes para verificar o resultado.
18) Usando os resultados dos teoremas integrais apresentados, encontre uma
fórmula para o volume de uma região em termos de uma integral sobre sua
superfície. Cheque seu resultado para uma esfera e para um paralelepípedo.
Eduardo Resek
Unifei
Parte I
Eletrostática
25
Capítulo 1
A Lei de Coulomb e o Campo
Elétrico
Objetivos
Ao final desse capítulo, você deverá ser capaz de:
a) Identificar os tipos de cargas elétricas existentes na natureza e descrever a
interação entre elas.
b) Descrever que tipo de carga possui cada partícula componente do átomo.
c) Explicar os fatos experimentais básicos a respeito da carga elétrica (quantização e conservação).
d) Descrever os diversos tipos de materiais sob o ponto de vista elétrico, e como
se pode eletrizá-los.
e) Descrever qualitativa e quantitativamente a interação eletrostática entre partículas carregadas.
f ) Explicar o porquê da necessidade de se introduzir a ideia de campo elétrico e
definí-lo.
g) Explicar o que são linhas de força e qual sua relação com o campo elétrico
numa região.
h) Explicar e justificar a ideia de distribuição contínua de cargas, enumerando os
tipos possíveis, explicando as limitações da aplicabilidade.
i) Utilizar o princípio da superposição para calcular campo elétrico de distribuições contínuas de cargas, identificando claramente os vetores e versores
envolvidos; escolher o sistema de coordenadas adequado para o cálculo e
identificar os elementos que são fixos e aqueles que são variáveis.
j) Identificar fisicamente simetrias que permitam a simplificação do cálculo
de campo elétrico de corpos carregados e justificar matematicamente essa
simplificação.
k) Utilizar o princípio da superposição para determinar a força de interação entre
corpos extensos carregados.
l) Determinar o movimento de cargas elétricas pontuais sob a influência de
27
28
Capítulo 1 A Lei de Coulomb e o Campo Elétrico
campos elétricos produzidos por outras cargas ou distribuições de cargas.
1.1 Carga elétrica
+
+
+
−
−
−
Figura 1.1 Cargas elétricas
Dá-se o nome de carga elétrica a uma propriedade da matéria introduzida
para entendermos qualitativa e quantitativamente um tipo de interação observada na natureza que, por razões históricas foi denominada interação elétrica ou
eletrostática. Desse modo, assim como a noção de massa gravitacional permite o
estudo da interação ou força gravitacional, a carga nos permite descrever as forças
elétricas entres corpos materiais. Entretanto, ao contrário da força gravitacional,
que é sempre atrativa, observou-se que a força elétrica pode ser de atração ou
repulsão. Assim, torna-se necessário admitir que existem duas espécies distintas
de carga elétrica, que convencionamos chamar de carga elétrica positiva e carga
elétrica negativa. Cargas elétricas de mesma espécie se repelem, ao passo que as
de espécies distintas se atraem.
A carga elétrica é uma propriedade fundamental das partículas elementares
que constituem a matéria. De fato, a matéria é um aglomerado de átomos ou
moléculas, e átomos são constituídos por prótons, nêutrons e elétrons; duas
dessa partículas apresentam carga elétrica (o próton possui carga elétrica positiva,
enquanto a carga do elétron é negativa). Entretanto, em escala macroscópica,
os efeitos da carga elétrica tendem a ser mascarados pelo fato que, na média,
há iguais quantidades de carga de ambas as espécies num corpo macroscópico.
Dizemos que o corpo, nestas condições, encontra-se eletricamente neutro. Se, por
outro lado, há um excesso de prótons ou um excesso de elétrons, ele se encontrará
num estado que denominamos (eletricamente) carregado.
1.2 Fatos experimentais importantes acerca da carga elétrica
Conservação da carga A carga elétrica total de um sistema isolado é constante
(a carga não pode ser criada nem destruída). Nunca foi observado qualquer
fenômeno que contrariasse esse fato. Mesmo em fenômenos "radicais"como o da
criação de um par elétron-pósitron, ou sua reação inversa, a aniquilação mútua
entre elétron e pósitron, originando radiação eletromagnética,
e − + e − γ,
onde γ representa um fóton de raios gama, a carga elétrica, ao contrário da massa,
é conservada, pois pósitron tem carga oposta à do elétron, enquanto um fóton,
radiação eletromagnética, não possui carga elétrica.
A carga é quantizada A carga elétrica só é encontrada na natureza em múltiplos
inteiros de uma carga fundamental (o quantum de carga). A menor carga livre
Eduardo Resek
Unifei
1.3 Natureza dos materiais
29
encontrada na natureza é, em valor absoluto, a do próton:
e = 1,602 · 10−19 C
(1.1)
Um elétron possui carga exatamente oposta à esta, de modo que, para um corpo
macroscópico qualquer, teremos
q = ±ne,
n ∈ N.
(1.2)
1.3 Natureza dos materiais
Do ponto de vista elétrico podemos classificar os materiais basicamente como
condutores, isolantes (ou dielétricos) e semicondutores.
Isolantes são aqueles onde a carga elétrica não possui liberdade de movimento, ou seja, oferecem alta resistência ao fluxo de carga elétrica. Exemplos
são os não metais, plásticos, madeiras, vidros, porcelanas, nylons, etc. Nesses
materiais a estrutura atômica/molecular é tal que todos os elétrons encontram-se
fortemente ligados aos seus respectivos átomos ou moléculas.
Já nos Condutores as cargas podem se mover com relativa liberdade. Exemplos são os metais, o corpo humano ou de animais, a terra, soluções salinas. Nos
sólidos a condução se dá porque existem alguns elétrons onde a ligação com os
átomos é muito fraca (última camada da distribuição eletrônica), de modo que
eles se tornam praticamente livres.
Os semicondutores, por outro lado, possuem propriedades intermediárias,
não sendo tão condutivos quanto os metais, mas consideravelmente mais que os
dielétricos. O mecanismo de condução dos materiais dessa classe é bem distinto
do dos condutores e não será abordado nesse curso.
Um outro tópico que não será endereçado nesse curso é o da supercondutividade, propriedade apresentada por alguns materiais a baixíssimas temperaturas,
quando a resistência à condução se torna praticamente nula.
Charles Augustin de Coulomb (17361806, Francês) Em sua homenagem,
deu-se seu nome à unidade de carga
elétrica, o coulomb. Engenheiro de formação, Coulomb foi principalmente
físico. Publicou 7 tratados sobre eletricidade e magnetismo, e outros sobre
torção, atrito entre sólidos, etc.[3] Experimentador genial e rigoroso, realizou
uma experiência histórica com uma balança de torção para determinar a força
exercida entre duas cargas elétricas (lei
de Coulomb). Durante os últimos quatro anos da sua vida, foi inspetor geral
do ensino público e teve um papel importante no sistema educativo da época.
(Wikipedia)
1.4 Formas de eletrização
Sendo constituídos por átomos, os corpos são naturalmente neutros do ponto
de vista elétrico. Entretanto, eles podem adquirir carga elétrica através de alguns
processos que discriminaremos a seguir, cujo efeito final é dotar o corpo de
uma carga líquida negativa (o corpo adquire elétrons) ou positiva (o corpo perde
elétrons):
1.4.1 Eletrização por atrito
Funciona bem para corpos isolantes. Se esfregarmos um material com outro,
há uma tendência dos elétrons se transferirem de um corpo para outro. Por
exemplo, esfregando um corpo de vidro com um pano de seda fará com que o
vidro ceda elétrons para o pano, fazendo com que o vidro apresente uma carga
líquida positiva e a seda negativa.
Unifei
Eduardo Resek
Figura 1.2 Eletrização por indução
30
Capítulo 1 A Lei de Coulomb e o Campo Elétrico
1.4.2 Eletrização por contato ou condução
Apropriada para carregar metais ou outros condutores. Se um corpo previamente
carregado toca um outro originalmente neutro, uma parte de sua carga se transferirá para o último, deixando-o carregado com carga de mesma natureza que a
sua.
1.4.3 Eletrização por indução
Também apropriada para condutores. Utilizamos também um corpo previamente
carregado, mas desta vez sem tocar o corpo que desejamos carregar. Aproximando
o objeto carregado do condutor e aterrando esse último1 , elétrons fluirão de ou
para a terra (corpo carregado positivamente atrairá elétrons para o condutor,
negativamente expulsará alguns dos elétrons para a terra). Se, antes de afastarmos
o objeto carregado, cortarmos a ligação do condutor com a terra, ele terá se
carregado com uma carga oposta à do objeto auxiliar.
1.4.4 Eletrização por irradiação
Submeter um corpo a radiação eletromagnética pode ter como consequência a
ejeção de elétrons de sua estrutura atômica. Um exemplo bem conhecido é o
efeito fotoelétrico, no qual até mesmo a luz visível pode causar a liberação de
elétrons ao incidir sobre uma superfície de, por exemplo, alumínio. Radiação
eletromagnética de frequência mais elevada (mais energética), pode até expelir
elétrons de camadas mais internas da estrutura atômica do material.
1.5 Lei de Coulomb
Lei experimental obtida por Charles Augustin de Coulomb em 1785, que
descreve quantitativamente a interação eletrostática, isto é, a força entre duas
cargas elétricas em repouso relativo. Essencialmente, ela estabelece que esta
força atua sobre a reta que contem as duas partículas, é diretamente proporcional
ao produto das carga e inversamente proporcional ao quadrado da distância que
as separa. Matematicamente,
q1
R̂12
F21 = k
r2 − r1 = R12
r1
r2
F21
Figura 1.3 Lei de Coulomb
2
R 12
R̂12 = k
q1 q2
3
R 12
R12 ,
(1.3)
é a força que q 1 exerce sobre q 2 , onde R12 = r2 − r1 é o vetor com origem na carga
q 1 e extremidade na carga q 2 . A constante k é frequentemente escrita em termos
da permissividade do vácuo, ²0 :
q2
O
q1 q2
k=
1
= 8,987 4 · 109 N.m2 /C2 ,
4π²0
²0 =
10−9
F/m = 8,85 · 10−12 F/m
36π
(1.4)
1 Significa conectar, através de um fio condutor, o corpo a um grande reservatório de carga, com
capacidade para ceder e/ou receber elétrons (geralmente a própria Terra, daí a denominação.)
Eduardo Resek
Unifei
1.6 Campo elétrico
31
Essa expressão vetorial já fornece o sentido correto do vetor força quando as
cargas são consideradas com o sinal algébrico adequado.
α
Exemplo 1.1 Duas cargas elétricas idênticas de 2,5 µC e massas iguais a
200 g cada uma, são suspensas de um mesmo ponto no teto através de um
fio leve e inextensível de comprimento 1,0 m. Qual o ângulo que cada um
dos fios formará com a vertical na posição de equilíbrio?
Solução:
T2
F12
q1
q2
F21
Adotando o sistema de eixos tal como na figura, podemos escrever as forças
que atuam sobre a carga q 2 como
F21 =
1 q 1 q 2 [` sen αx̂ − ` sen α(−x̂)]
q1 q2
=
x̂,
3
4π²0
(2` sen α)
16π²0 `2 sen2 α
mg
Figura 1.4 Cargas suspensas
P = −mg ẑ,
T = T (− sen αx̂ + cos αẑ)
A condição de equilíbrio é que F12 + P + T = 0, implicando em
µ
¶
q1 q2
−
T
sen
α
x̂ + (T cos α − mg )ẑ = 0
16π²0 `2 sen2 α
=⇒ T cos α = mg ,
T sen3 α =
q1 q2
16π²0 `2 .
Dividindo uma pela outra, encontramos
tan α sen2 α =
tan3 α
q1 q2
6,25 · 10−12 × 9 · 109
=
=
= 7,17·10−3 ,
1 + tan2 α 16π²0 `2 mg 4 × (1,0)2 × 0,200 × 9,81
ou seja,
tan3 α − 0,007 17(tan2 α + 1) = 0.
Resolvendo esta equação encontramos tan α = 0,195 249, donde
α = 11,0°
1.6 Campo elétrico
A experiência mostra que as cargas elétricas não interagem diretamente sobre as
outras; Quando o estado de uma determinada carga elétrica se altera (sua posição,
por exemplo), essa informação não é imediatamente pela sua vizinhança, mas
se propaga através do espaço com uma velocidade finita. Para melhor descrever
essa interação, faz-se necessário admitir a existência de um agente intermediário
Unifei
Eduardo Resek
32
Capítulo 1 A Lei de Coulomb e o Campo Elétrico
Definição de Campo Elétrico
qj
qn
Fi1
q3
Fi2
Fi3
Fij
q2
q1
Fi
Fin
Figura 1.5 Princípio da superposição
que carrega essas informações a respeito do estado de um sistema de cargas. Esse
agente denominado campo elétrico.
Para definirmos o campo elétrico num ponto do espaço, adotamos o seguinte
procedimento: colocamos neste ponto uma carga teste q e determinamos a força
elétrica F que atua sobre ela. O campo elétrico é a razão F/q no limite de q
tendendo a zero:
F
E = lim .
(1.5)
q→0 q
O limite é necessário para garantir que a influência da carga teste sobre a distribuição original de cargas cujo campo queremos definir seja a menor possível. É
claro que, devido à quantização da carga elétrica, o processo de limite descrito
na equação acima nunca pode ser realizado estritamente em conformidade com
a definição matemática de limite (processo contínuo de varição da carga), nem
tampouco pode a carga chegar a valores menores que o quantum de carga.
1.7 Princípio da superposição
Para um sistema de muitas partículas, a força total sobre a i -ésima carga é obtida
pelo princípio da superposição, somando-se todas as forças devido a cada uma
das outras partículas como se as demais não existissem:
Fi =
N
N q
N q (r − r )
1 X
qi X
qi X
j
j i
j
Fi j =
R̂
=
j
i
2
3
4π²0 j 6=i
4π²0 j 6=i R j i
4π²0 j 6=i |ri − r j |
(1.6)
O campo elétrico na posição ocupada pela carga de teste será, portanto:
E(ri ) =
N F
N q
N q (r − r )
1 X
1 X
1 X
ij
j
j i
j
=
R̂
=
j
i
2
3
4π²0 j 6=i q i
4π²0 j 6=i R j i
4π²0 j 6=i |ri − r j |
1.8 Linhas de força
Desde o princípio dos estudos sobre eletricidade foi introduzida a ideia de linhas
de força para representar visualmente o abstrato conceito de campo elétrico
numa certa região do espaço. São linhas orientadas no sentido do campo elétrico
em cada ponto do espaço, traçadas de modo a serem sempre tangentes ao campo
em cada ponto. As figuras a seguir ilustram alguns casos simples envolvendo
cargas pontuais. Note que as linhas de força são apenas uma forma intuitiva de
visualizar o campo; por exemplo, se por um lado existe em geral campo em todos
os pontos do espaço, nunca conseguiremos fazer passar uma linha de força por
todos os pontos. Na verdade, só conseguimos traçar um número finito arbitrário
de linhas, interpretando a concentração dessas linhas ao redor de certo ponto
como um indicativo da magnitude do campo naquele ponto.
Eduardo Resek
Figura 1.6 Linhas de força
Unifei
1.9 Distribuições contínuas de cargas
33
1.9 Distribuições contínuas de cargas
No mundo real encontramos a propriedade carga elétrica presente nas partículas
elementares, tais como o elétron e o próton. Átomos e moléculas são, em seu
estado natural, eletricamente neutros. Corpos macroscópicos apresentam algum
excesso de carga quando, por algum processo, ocorre uma transferência de carga
de um corpo para outro (usualmente na forma de elétrons). Geralmente o número
de cargas elementares em excesso é muito grande e, associado ao fato que as
dimensões moleculares são muito pequenas, constitui em geral uma aproximação
excelente ignorar a natureza discreta da carga elétrica quando analisamos uma
situação envolvendo corpos macroscópicos. Trabalhamos então com o conceito
de distribuição contínua de cargas, isto é, com a hipótese que a carga elétrica
se distribui continuamente sobres volumes ou superfícies. Definimos então as
densidades de cargas:
P
r−
r
dv 0
Densidade volumétrica de cargas
r0
∆q
dq
=
0
∆v →0 ∆v
d v0
ρ(r0 ) = lim
0
(1.7)
O
Figura 1.7 Distribuição volumétrica
dS 0
Densidade superficial de cargas
r − r0
r0
∆q d q
= 0
σ(r ) = lim
0
∆s →0 ∆s 0
ds
0
P
dE
(1.8)
r
O
Densidade linear de cargas
Figura 1.8 Distribuição superficial
∆q
dq
λ(r ) = lim
=
∆`0 →0 ∆`0
d `0
0
(1.9)
Para cada um desses tipos de distribuição de carga, podemos determinar a carga
total do objeto carregado como
Z
Z
Z
0
0
0
0
Qv0 =
ρ(r ) d v
Q S 0 = σ(r ) d S
Q `0 = λ(r0 ) d r0 .
(1.10)
v0
dE
0
r
S0
d`0
r − r0
r0
P
dE
`0
Do ponto de vista macroscópico, mesmo um volume tendendo a "zero"conterá
um número muito grande de átomos ou moléculas, o que nos garante uma aproximação boa procedendo dessa forma. Tratamos então um elemento de carga
como uma carga pontual, de modo que o campo elétrico em um ponto P do espaço descrito pelo vetor posição r devido a uma distribuição arbitrária de cargas
seria
"
#
Z
Z
Z
N q
X
1
ρ(r0 )
σ(r0 )
λ(r0 )
j
0
0
0
E(r) =
R̂ j +
R̂ d v +
R̂ d S +
R̂ d l , (1.11)
2
2
2
4π²0 j =1 R 2j
v0 R
S0 R
l0 R
r
O
Figura 1.9 Distribuição linear
onde R é o vetor do elemento de carga em questão até a carga q 0 , e R j a partir da
j -ésima carga pontual.
Unifei
Eduardo Resek
34
Capítulo 1 A Lei de Coulomb e o Campo Elétrico
Pode-se mostrar que uma carga pontual q num ponto r0 pode ser expressa
por uma densidade de cargas ρ(r) = qδ(r − r0 ). Além disso, as contribuições dos
diversos tipos de densidades de cargas são estruturalmente idênticas, de modo
que não há perda de generalidade se escrevermos o campo elétrico genericamente
como
Z
Z
1
ρ(r0 )
1
ρ(r0 )(r − r0 )
0
E(r) =
R̂
d
v
=
d v 0.
(1.12)
4π²0 v 0 R 2
4π²0 v 0 |r − r0 |3
1.10 Exemplos de cálculo de campo elétrico
1.10.1 Um disco carregado não uniformemente
Um disco de DVD possui raios interno e externo respectivamente iguais a 1,0 cm e
8,0 cm, encontrando-se carregado com carga total 5,0 µC, distribuída de maneira
inversamente proporcional à distância ao centro do disco. Determinar o campo
elétrico produzido por essa distribuição num ponto do eixo de simetria do DVD
(eixo perpendicular ao seu plano, passando pelo seu centro).
Solução: Como se trata de uma distribuição superficial de cargas, devemos primeiramente determinar a sua expressão. Como a carga encontra-se distribuída
de maneira não uniforme, não podemos dizer que a densidade é simplesmente a
carga total do disco (que é conhecida) dividida pela sua área total. O que sabemos
é que a distribuição de cargas (ou seja, sua densidade superficial, neste caso)
é inversamente proporcional à distância de cada elemento de cargas ao centro
do disco. Se adotarmos um sistema de eixos cuja origem coincide com o centro
do disco, e eixo z perpendicular ao plano do disco, podemos identificar essa
distância coma a coordenada ρ do sistema de coordenadas cilíndricas. Assim
Carga distribuída de maneira
inversamente proporcional:
isso se refere à densidade da
distribuição!
σ(r0 ) ∝
1
β
= 0,
0
ρ
ρ
onde β é uma constante a ser determinada. Isso é realizado Escrevendo a carga
total como em (1.8):
dE z
Z
Q=
S0
σ(r0 ) d S 0 =
2π Z b
Z
0
a
β 0 0
ρ d ρ d ϕ0 = 2πβ(b − a),
ρ0
onde a e b são os raios interno e externo, respectivamente, teremos
r
r − r0
y
r0
β=
Q
5,0 · 10−6
=
= 1,14 · 10−5 C/m.
2π(b − a) 2π × 7,0 · 10−2
A densidade de cargas fica
x
Figura 1.10 Disco carregado
σ(ρ 0 ) =
Q
.
2π(b − a)ρ 0
Lembrando que a lei de Coulomb se aplica para cargas pontuais ou infinitesimais,
devemos determinar, para cada elemento de carga possível sobre a distribuição,
Eduardo Resek
Unifei
1.10 Exemplos de cálculo de campo elétrico
35
o campo que ele produz, somando para toda a distribuição. Devemos, para isso,
sempre escolher um elemento de cargas suficientemente genérico para representar todo e qualquer possível elemento de cargas da distribuição. Não escolha,
por exemplo, um elemento de cargas sobre algum dos eixos, na periferia do disco
(nesse caso, pois a distribuição de cargas é superficial) e, jamais, na origem. A
figura ilustra o elemento de carga escolhido, cujo vetor posição escrevemos como
r0 = ρ 0 ρ̂ 0 ,
a ≤ ρ 0 ≤ b.
Desejamos calcular o campo sobre um ponto qualquer do eixo z, assim escrevemos sucessivamente
|r − r0 | = (z 2 + ρ 02 )1/2 .
r − r0 = z ẑ − ρ 0 ρ̂ 0 ,
r = z ẑ,
A lei de Coulomb fornece então
1
E(r) = E(z) =
4π²0
2π Z b
Z
a
0
β (z ẑ − ρ 0 ρ̂ 0 ) 0 0
ρ d ρ d ϕ0 .
ρ 0 (z 2 + ρ 02 )3/2
Todo cuidado agora é pouco. Um erro muito comum cometido pelo estudante é
escrever, a partir daí que
β
ẑ z
4π²0
µ
E(z) =
dρ dϕ
0
2π Z b
Z
0
0
(x 2 + ρ 02 )3/2
a
− ρ̂ 0
2π Z b
Z
0
a
ρ dρ dϕ
0
0
0
Atenção para o erro muito
comum: tratar o versor
como constante!
¶
u ERRADO!
(x 2 + ρ 02 )3/2
O erro é que ρ̂ 0 é um vetor que varia de ponto para ponto, não pode portanto ser retirado para fora da integral acima. Devemos escrevê-lo em termos de
versores de coordenadas cartesianas:
ρ̂ 0 = cos ϕ0 x̂ + sen ϕ0 ŷ,
o que resulta
µ Z 2π Z b
d ρ 0 d ϕ0
β
E(z) =
ẑ z
2
02 3/2
4π²0
0
a (x + ρ )
¶
Z 2π Z b 0
Z 2π Z b 0
ρ cos ϕ0 d ρ 0 d ϕ0
ρ sen ϕ d ρ 0 d ϕ0
− x̂
−
ŷ
(x 2 + ρ 02 )3/2
(x 2 + ρ 02 )3/2
0
a
0
a
Ora, as integrais em x̂ e ŷ se anulam, pois num intervalo completo de 0 a 2π
tanto o seno como o cosseno, integrados, se anulam:
2π
Z
0
0
0
cos ϕ d ϕ =
2π
Z
0
sen ϕ0 d ϕ0 = 0.
Na integral restante,
2π
Z
0
Unifei
0
d ϕ = 2π e
Z
d ρ0
(z 2 + ρ 02 )3/2
=
ρ0
z2
p
z 2 + ρ 02
.
Eduardo Resek
36
Capítulo 1 A Lei de Coulomb e o Campo Elétrico
A integral foi resolvida perfazendo-se a mudança de variáveis ρ 0 = z tan α ou, mais
fácil ainda, consultando este site. Resta-nos agora apenas completar o cálculo
introduzindo os limites da integral. Reintroduzindo o β calculado anteriormente,
fica:
µ
¶
a
Q
b
E(z) = ẑ
−p
p
4π²0 (b − a)z
z2 + b2
z2 + a2
Com os valores numéricos, para z em cm, ficaria:
¶
µ
5,63 · 103
1
8
E(z) = ẑ
−p
kV/mm
p
z
z 2 + 64
z2 + 1
u Simetria!
dE z
dE0
r
r − r0
y
r0
x
Figura 1.11 Elemento de carga
simétrico dE z dE0
dE0 k
dEk
r − r00
dS 00
r − r0
r
r00
r0
dS 0
Figura 1.12 Cancelamento de
componentes do campo
Vamos discutir um pouco mais esse resultado, com particular atenção à simetria apresentada pela distribuição de cargas que, sem mesmo realizar nenhum
cálculo, nos permitiria prever que a única componente do campo elétrico seria o
longo do eixo de simetria do disco (eixo z).
O cálculo do campo envolve a soma das contribuições de todos os possíveis
elementos de carga infinitesimais sobre a superfície do disco. Por isso devemos
escolher um elemento de carga suficientemente genérico sobre a distribuição,
para que ele possa representar qualquer possível elemento infinitesimal do disco,
tal como fizemos na figura. Ora, no processo de soma das contribuições, vamos
encontrar a de um elemento de carga simetricamente disposto, em relação ao
eixo z, ao elemento considerado. Sua contribuição d E0 para o campo em P será
um vetor de mesmo módulo que d E, pois sua distância ao ponto P é a mesma
que a do primeiro elemento e sua carga também é a mesma daquele! Isso se
deve ao fato de que a densidade de cargas sobre a superfície do disco, embora
não seja uniforme, depende apenas da distância do elemento ao centro do disco;
como o segundo elemento considerado está numa posição simétrica ao primeiro,
relativamente ao cento do disco, suas coordenadas ρ 0 são idênticas. Além disso,
essa mesma geometria nos garante que os ângulos formados pelas contribuições
d E e d E0 com o eixo z são iguais, implicando que a soma vetorial de ambos será
ao longo desse eixo!
Poderíamos portanto, com base nessa análise, ter-nos poupado do cálculo
das demais componentes, embora eles não tenham sido (nesse caso) difíceis (por
outro lado, uma escolha infeliz da ordem em que as integrais foram realizados
poderia ter mudado radicalmente esse panorama — tente, por exemplo, fazer
primeiramente a integral em ρ 0 das componentes em x̂ ou ŷ acima!).
1.10.2 Linha reta carregada uniformemente
Se houver alguma direção
privilegiada em termos de
simetria na geometria da distribuição, é sempre vantajoso
adotá-la como sendo o eixo
z.
Eduardo Resek
Determinar o campo elétrico produzido, num ponto qualquer do espaço, por
uma distribuição retilínea infinita de cargas, carregada com uma densidade linear
uniforme de cargas λ. Adotemos o eixo z de forma que ele coincida com a
linha carregada Como a linha é infinita e a distribuição uniforme, percebemos
que o campo não deve depender da coordenada z do ponto de observação. É
aparente também que a direção do campo em cada ponto deve ser na direção da
perpendicular baixada do ponto até a linha carregada, nesse caso portanto, de
Unifei
1.10 Exemplos de cálculo de campo elétrico
37
ρ̂. A não ser pela direção do campo, este não depende tampouco da coordenada
azimutal (que especifica a posição do ponto de observação ao redor da linha
de cargas). Assim, sem perda de generalidade, podemos calcular o campo num
ponto genérico do plano x y:
r = ρ ρ̂.
z
d`0
r − r0
r0
Escolhendo um elemento de carga genérico tal como o da figura, temos
q
r0 = z 0 ẑ
=⇒
r − r0 = ρ ρ̂ − z 0 ẑ, |r − r0 | = z 02 + ρ 2 ,
P
r
ρ
dE
e a lei de Coulomb fica
1
E(r) =
4π²0
Z
`0
λ(r0 )(r − r0 ) 0
λ
dr =
0
3
|r − r |
4π²0
Z
ρ ρ̂ − z 0 ẑ
d z 0.
02
2
−∞ (z + ρ )
∞
Nesse caso, o versor ρ̂ é fixo, pois refere-se ao ponto de observação, e não ao
vetor posição do elemento de carga da distribuição. Já vimos que, por força
da simetria da distribuição, o campo deve resultar ao longo da direção axial, e
portanto a integral relativo à componente ẑ deve se anular. De fato, o integrando
é uma função ímpar e os limites de integração simétricos com respeito à origem,
garantindo um resultado nulo para a integração. Resta-nos
Z ∞
d z0
λρ
E = ρ̂
4π²0 −∞ (z 02 + ρ 2 )3/2
A substituição z 0 = ρ tan α transforma a integral acima em ρ −2 cos α, pois d z 0 =
ρ sec2 α d α e o denominador é equivalente a [ρ 2 (1 + tan2 α)]3/2 = (ρ 2 sec2 α)3/2 =
ρ 3 sec3 α, agora com os limites de −π/2 e π/2. Claro que, se você preferir, sempre
se pode consultar este site. Resulta
λ
E=
ρ̂
2π²0 ρ
Figura 1.13 Linha infinita carrez
gada
d`0
r − r0
r0
P
r
r00
dE0
r − r00
d`00
Figura 1.14 Simetria
f (z 0 )
(1.13)
z0
1.10.3 Uma semi-esfera carregada
Uma semi-esfera maciça de raio R encontra-se carregada com um densidade
volumétrica de cargas não uniforme dada por
Figura 1.15 Integrando em ẑ
z
r
ρ = ρ 0 sen θ,
R
onde θ é o ângulo medido com respeito ao eixo de simetria da semi-esfera. Determinar o campo elétrico no seu centro de curvatura.
A figura ilustra a disposição dos eixos do sistema de coordenadas. Escolhemos
um elemento de carga tal como o ilustrado na figura, para o qual podemos
escrever:
r0 = r 0 r̂0 = r 0 (sen θ 0 cos ϕ0 x̂ + sen θ 0 sen ϕ0 ŷ + cos θ 0 ẑ)
ρ
dE
dE
θ0
y
r0 = r0 r̂0
x
dv 0
Figura 1.16 Semiesfera
Para um ponto qualquer no eixo de simetria da distribuição, fora dela, teremos
r = z ẑ.
Unifei
Eduardo Resek
38
Capítulo 1 A Lei de Coulomb e o Campo Elétrico
Desse modo
r − r0 = z ẑ − r 0 r̂0 = (z − r 0 cos θ) ẑ − r 0 sen θ 0 cos ϕ0 x̂ − r 0 sen θ 0 sen ϕ0 ŷ
=⇒ |r − r0 | = (z 2 + r 02 − 2zr 0 cos θ 0 )1/2 ,
e a lei de Coulomb fornece
Z
ρ(r0 )(r − r0 )
1
d v0
E(r) =
4π²0 v 0 |r − r0 |3
Z 2π Z π Z R
r 0 sen θ 0
1
ρ0
=
×
4π²0 0
R
π/2 0
[(z − r 0 cos θ 0 ) ẑ − r 0 sen θ 0 cos ϕ0 x̂ − r 0 sen θ 0 sen ϕ0 ŷ]
(z 2 + r 02 − 2zr 0 cos θ 0 )3/2
r 02 sen θ 0 d r 0 d θ 0 d ϕ
As componentes em x̂ e ŷ novamente se anulam devido às integrais na coordenada azimutal ϕ (você consegue justificar fisicamente através de argumentos
de simetria, o porquê disso?). Na direção de ẑ, a integral em ϕ resulta em 2π.
Ficamos então com
Z π Z R 03
ρ0
r (z − r 0 cos θ 0 ) sen2 θ 0
E(z) = ẑ
d r 0 d θ0 .
2²0 R π/2 0 (z 2 + r 02 − 2zr 0 cos θ 0 )3/2
O cálculo da integral acima é bem complicado, mas nossa tarefa consiste em
determinar o campo elétrico no centro de curvatura da distribuição, que é exatamente a origem. Para z = 0, a expressão acima fica
ρ0
E(0) = −ẑ
2²0 R
Z
π
Z
π/2 0
R
·
¸π
r 04 cos θ 0 sen2 θ 0
ρ 0 R 2 sen3 θ
0
0
d r d θ = −ẑ
,
r 03
2²0 2
3
π/2
ou
E(0) =
ρ0R 2
ẑ
12²0
Questões sobre o Capítulo 1: A Lei de Coulomb e o Campo Elétrico
Eduardo Resek
Q1.1
Você dispõe de um bastão de vidro, um lenço de seda e duas esferas de
metal (condutoras), inicialmente neutras, montadas em um suporte
de plástico (isolante). Descubra um modo de carregar as esferas com
cargas iguais e opostas. Não é permitido tocar com o bastão nas esferas.
é necessário que as esferas sejam do mesmo tamanho?
Q1.2
Se você friccionar vigorosamente um bastão de ebonite (um plástico
isolante) com uma flanela, o bastão ficará eletrizado. Entretanto, se
você friccionar uma moeda entre os dedos, ela não irá adquirir carga
alguma. Por que?
Q1.3
Depois de caminhar algum tempo sobre um carpete, você freqüentemente sente um “choque” ao tocar na maçaneta de metal da porta.
Qual a causa disso?
Unifei
1.10 Exemplos de cálculo de campo elétrico
Q1.4
a) Defina linhas de força de um campo elétrico. b) Duas linhas de força
nunca se cruzam. Explique por que.
Q1.5
Uma carga pontual q é solta numa região de campo elétrico não uniforme. A trajetória que ela segue necessariamente coincide com uma
das linhas de força?
Q1.6
Duas cargas pontuais de mesmo módulo e sinais opostos encontramse sobre uma reta separadas por uma distância d . Determine a direção
e sentido do campo elétrico: a) sobre a reta e entre as cargas; b) sobre
a reta, fora das cargas, próximo à carga positiva; c) idem, próximo à
carga negativa; d) fora da reta, no plano mediatriz das cargas (plano
perpendicular à reta e que passa pelo ponto médio entre as cargas).
39
Problemas do Capítulo 1: A Lei de Coulomb e o Campo Elétrico
P1.1
Duas cargas de −10 µC e 20 µC encontram-se separadas por uma distância de 20 cm. Onde deve ser colocada uma terceira carga de modo
que, sob a ação dessas duas, fique em repouso? Resp: Ao longo da reta suporte
das duas cargas, a 48,5 cm da carga negativa e 68,5 cm da positiva
P1.2
Dez cargas pontuais de 500 µC estão colocadas sobre uma circunferência de raio 2 m, todas igualmente afastadas entre si. Calcule a força
exercida por esse conjunto sobre uma carga pontual de −20 µC , situada sobre o eixo, dois metros afastada do plano da circunferência.
P1.3
Duas esferas condutoras idênticas possuem cargas de sinais opostos e
se atraem mutuamente com uma força de 0,108 N, quando separadas
por uma distância de 50 cm. Elas são ligadas por um fio condutor, que
é removido logo a seguir, passando então a se repelir com uma força
de 0,036 N. Quais eram os valores iniciais das cargas das esferas? Resp:
±3,0 µC e ∓1,0 µC
P1.4
Uma carga Q deve ser dividida em duas: q e Q − q. Qual deve ser o
valor de q para que a repulsão coulombiana entre as duas novas cargas
seja máxima? Resp: q = Q/2
P1.5
Duas cargas pontuais de valor q e −q são fixadas nos pontos P 1 (0, a) e
P 2 (0, −a) respectivamente, de um sistema de coordenadas cartesianas,
formando o que se denomina um dipolo elétrico. Uma terceira carga
positiva e de mesmo valor, é colocada em algum ponto sobre o eixo
dos x.
a) Qual a intensidade e orientação da força exercida sobre a terceira
carga quando esta se encontra na origem?
b) Qual é a força sobre ela quando sua abcissa é x?
c) Esboce o gráfico da força sobre a terceira carga em função de x, para
Unifei
Eduardo Resek
40
Capítulo 1 A Lei de Coulomb e o Campo Elétrico
valores de x entre −4a e 4a.
d) Mostre que quando a abcissa x da terceira carga for grande comparada à distância a, a força sobre ela é inversamente proporcional ao
cubo da sua distância ao centro do dipolo.
e) Situando agora a terceira carga sobre o eixo dos y, a uma ordenada
y grande comparada com a distância a, mostre que a força sobre ela
também é inversamente proporcional ao cubo de sua distância à origem do dipolo.
Resp: a) − ŷ
d) F ' − ŷ
2π²0 x 3
a3
b)
e) F ' ŷ
(a 2 + x 2 )3/2
q2a
F0
π²0 y 3
Três cargas pontuais de mesma massa m = 200 g e carga elétrica q são
penduradas por fios sem massa e inextensíveis, todos de comprimento
L = 1,0 m, a partir de um ponto comum no teto. Na posição de equilíbrio, a distância entre cada uma delas vem a ser de 20 cm. Determine o
valor de cada carga. Resp: 0,765 µC
P1.7
A cunha cilíndrica limitada pelas superfícies z = 0, z = 3(m), ϕ = 300 ,
ϕ = 600 e ρ = 5(m) tem densidade volumétrica de cargas dada por
ρ v = ρ sen 2ϕ(nC/m3 ). Determinar a carga elétrica total encerrada pela
cunha. Resp: 62,5 nC
P1.8
Seja uma distribuição (infinita) de cargas com densidade ρ, dada no
sistema de coordenadas esféricas por
z
λ
(= F0 )
P1.6
P
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
q2
2π²0 a 2
q2a
ρ=K
α2
e −ar
,
r2
K = c t e.
a) Considerando uma esfera de raio R centrada na origem do sistema,
determine a carga de um hemisfério.
b) Qual o raio R 0 da esfera que contem metade da carga total da distribuição (que é infinita!)?
α1
Resp: a)
P1.9
Figura 1.17 Linha finita (P1.9)
2kπ(1 − e−aR )
a
b) R 0 =
1
l n2
a
Mostre que o campo elétrico produzido por uma linha carregada com
densidade de cargas uniforme λ e disposta ao longo do eixo zé dado
por
¤
λ £
E=
(cos α1 + cos α2 ) ρ̂ + (sen α2 − sen α1 ) ẑ ,
4π²0 ρ
onde α1 e α2 são os ângulos mostrados na figura.
P1.10
Considere uma barra muito fina de comprimento L , uniformemente
carregada, com uma densidade linear de cargas λ.
a) Determine o campo eletrostático E produzido pela barra num
ponto situado no seu eixo mediatriz. Calcule E para os seguintes
Eduardo Resek
Unifei
1.10 Exemplos de cálculo de campo elétrico
41
casos: z >> L e z << L (ou L → ∞, fio retilíneo infinito uniformemente carregado).
b) Determine o campo num ponto sobre o eixo perpendicular à
barra que passa por uma de suas extremidades.
Resp: E =
2π²0 z
λL
p
L 2 +4z 2
ẑ. Para z >> L, E =
q
λ
ẑ, e, para z << L, (ou L → ∞), E = 2π²
ẑ
0z
4π²0 z 2
.
P1.11
Uma barra muito fina de comprimento L = 1,0 m é carregada com
uma densidade linear de cargas λ que varia linearmente ao longo da
barra, desde um valor −λ0 numa extremidade, até o valor λ0 no outro
extremo, sendo λ0 = 0,50 µC/m. Determine o campo eletrostático
produzido
pela barra num ponto situado: a) no seu eixo mediatriz, a
p
2 m da barra; b) no prolongamento da reta que contem a barra, a 2 m
da extremidade. Resp: a) E = −0,24 x̂ kV/m
b) E = 0,10 x̂ kV/m
P1.12
Usando a lei de Coulomb (integração direta), determine o campo produzido por um fio de carga Q e comprimento L, dobrado em forma
de um arco de circunferência de 60ř, no seu centro de curvatura; Resp:
E=
P1.13
q
12²0 L 2
, ao longo da bissetriz do arco da circunferência.
Um fio não condutor muito fino forma uma circunferência de raio
a e está localizado no plano x y, com seu centro na origem. O fio
possui uma densidade linear de cargas dada por λ = λ0 sen ϕ, onde ϕ
é o ângulo medido a partir do eixo x positivo. Determine: a) a carga
total do fio; b) E na origem. c) Você acha alguma incoerência entre os
λ0
resultados de a) e b)? Resp: a) Zero
b) E = (− ŷ)
4²0 a
P1.14
Considere um disco de raio a, uniformemente carregado, com densidade superficial de carga σ;
a) Determine o campo eletrostático E num ponto qualquer do eixo
de simetria deste disco; b) Uma partícula de carga Q e massa m é
solta do eixo z a partir do repouso, de uma distância z 0 do disco.
Determine a velocidade que ela possuirá quando atingir uma distância (i ) 4z 0 ,
(i i ) ∞ do disco. c) Calcule E para os seguintes casos: z >> a e z << a ( ou a → ∞, isto é, o disco se torna um
plano infinito uniformemente carregado). d) Qual o máximo valor
de z para que se possa usar a aproximação de plano infinito (isto
é, considerar E ≈ σ/(2²0 )), cometendo um erro de no máximo 5%?
~ (z) = σ [1 − p z
Resp: a) E
2²
0
z 2 +a 2
~ (z) = σ ẑ, (plano infinito).
E
2²
2
~ (z) = σa ẑ =
]ẑ, para z > 0 , E
2
4²0 z
Q
ẑ (carga puntiforme) e
4π²0 z 2
0
P1.15
Unifei
Determine o campo e o potencial eletrostáticos produzidos por um
disco de raio a carregado com σ = σ0 sen2 ϕ num ponto qualquer de
seu eixo de simetria.
Eduardo Resek
42
Capítulo 1 A Lei de Coulomb e o Campo Elétrico
P1.16
Uma carga está distribuída sobre o eixo z com densidade λ0 para
|z| > 4 m e λ = 0 para |z| < 4 m. Determine o campo elétrico no ponto
P (0, 2, 0) m.
P1.17
Um quadrado, que possui lado 2 m , está centrado na origem e situa-se
no plano z = 0, encontra-se carregado com uma densidade superficial
de cargas
σ = |x| nC/m2 .
Determine: a) a carga total da distribuição; b) o campo E no ponto
P (0, 0, 1) m. Resp: a) Q = 2,0 nC
b) 8,02 ẑ (V/m)
P1.18
Um quadrado de lado 2 m jaz no plano x y delimitado por 0 ≤ x ≤ 2 m e
0 ≤ y ≤ 2 m, carregado com carga superficial
σ = 2x(x 2 + y 2 + 4)3/2 µC/m2 .
Determine o campo elétrico no ponto do eixo z situado a 2 m acima do
plano.
P1.19
Uma esfera não condutora de raio R está carregada com uma densidade de cargas não uniforme dada por ρ = kr sen θ, onde r é a distância
medida a partir do centro da esfera e θ é o ângulo a partir de um eixo de
referência. A esfera é cortada exatamente ao meio, num plano normal
ao referido eixo, e uma das partes jogada fora. Determine:
a) A carga total da semiesfera; b) O campo elétrico no centro de curva2Q
tura da semiesfera em função da carga total desta. Resp: b) E = 2 2 ẑ
3π ²0 R
P1.20
Uma esfera condutora de raio R encontra-se carregada com uma densidade superficial de cargas dada por σ = Q cos θ/R 2 . Determine:
a) Sua carga total;
b) Seu momento de dipolo total, definido como o vetor
Z
p = σ(r0 ) r0 d S 0
S0
c) O campo que ela produz em seu centro (para quem gosta de desafios,
tente calcular o campo num ponto qualquer do eixo z, tanto para z < R
Q
quanto para z > R). Resp: a) Q = 0, b) p = ẑ 4πRQ/3, c) E = ẑ
2
3²0 R
Eduardo Resek
Unifei
Capítulo 2
A Lei de Gauss
Objetivos
Ao final desse capítulo, você deverá ser capaz de:
a) Calcular fluxo de um campo elétrico através de uma superfície qualquer através de integração direta.
b) Explicar por que o fluxo elétrico através de uma superfície fechada só depende
da carga em seu interior, ou seja, carga fora de uma superfície fechada não
produz fluxo através dela.
c) Calcular fluxo de um campo elétrico através de uma superfície fechada relacionandoo com a carga contida no interior dessa superfície.
d) Identificar situações de simetria e classificá-las.
e) Utilizar a lei de Gauss para calcular o campo elétrico em cada tipo de simetria
estudado, escolhendo superfícies auxiliares (gaussianas) adequadas (forma e
local).
f ) Determinar a carga contida em uma região fechada, se o campo elétrico for
conhecido.
g) Calcular a função potencial elétrico ou a diferença de potencial elétrico entre
dois pontos a partir do campo elétrico.
h) Determinar a densidade de cargas em cada ponto de uma região onde o campo
elétrico for conhecido.
i) Justificar por que o campo elétrico é nulo no interior de materiais condutores
em situações de equilíbrio eletrostático.
j) Explicar por que a carga textem excesso de um condutor em equilíbrio eletrostático se distribui na sua superfície externa.
k) Explicar o fenômeno de indução e determinar a distribuição de cargas em
materiais condutores em situações de equilíbrio eletrostático, com ou sem
cavidades, tanto em seu interior como nas superfícies internas e externa.
l) Justificar por que o campo elétrico deve ser perpendicular à superfície de um
condutor em equilíbrio eletrostático, e determiná-lo em termos da densidade
superficial de cargas local, ou vice-versa.
43
44
Capítulo 2 A Lei de Gauss
2.1 Fluxo de um vetor
B
n̂
A
dS
A palavra fluxo transmite a idéia de movimento através de uma região, por exemplo, o fluxo de um rio em seu leito, fluxo de ar (vento!), etc. Matematicamente, o
conceito de fluxo está associado a um campo vetorial que atravessa uma dada
superfície. Dado um campo vetorial A numa região do espaço, definimos o fluxo
ΦA do campo através de uma superfície S como o integral
Z
ΦA = A·n̂ d S,
S
onde d S é um elemento infinitesimal de área e n̂ um vetor unitário normal a d S.
O cálculo do integral é o usual: dividimos a superfície S em um número muito
grande de pequenos elementos de superfície, calculamos a contribuição em cada
um desses elementos, A·n̂i ∆S i e, tomando o limite de N → ∞, somamos tudo:
Figura 2.1 Fluxo
Z
A·n̂ d S
S
=
=
lim
N →∞ i =1
lim
N
X
N →∞ i =1
Z
=
N
X
S
Ai ·n̂i ∆S i
A i cos θi ∆S i
A cos θ d S
Observe que a definição é compatível com a idéia do campo atravessando a
superfície: na figura, o vetor B é perpendicular ao vetor normal à superfície, n̂,
jaz rente à superfície e não a atravessa: o produto escalar na expressão garante
que isso se traduz num fluxo zero, pois B·n̂ = B cos(π/2) = 0 (naquele elemento
de superfície ilustrado).
É claro que ΦA é um escalar, podendo ser positivo, negativo ou nulo, dependendo do ângulo formado entre o vetor e a normal à superfície em cada ponto.
O sentido de n̂ é, em geral, arbitrário, mas para superfícies fechadas n̂ é sempre
orientado para fora da superfície. Nesse caso especial é usual representarmos o
integral com um circulo, indicando que a superfície S é fechada:
I
ΦA = A·n̂ d S,
S
2.2 Ângulo Sólido
É uma medida da abertura espacial determinada por uma superfície em relação a
um ponto de referência que não pertença a ela. Comecemos com uma superfície
em forma de uma calota esférica de raio R. O ângulo sólido, medido em esferoradianos ou stereo-radianos (sr) é, por definição
Ω=
Eduardo Resek
A
,
R2
Unifei
2.3 A Lei de Gauss para o campo elétrico
45
sendo independente do raio da esfera, pois a área é proporcional ao quadrado do
raio. Para generalizar, consideremos um elemento de área ∆S muito pequeno;
Sendo R a distância do ponto de referência P ao centro de ∆S, e ∆S 0 a calota de
uma esfera de raio R com centro em P , o ângulo sólido será
∆S 0
∆S ·n̂R̂
≈=
,
2
R
R2
∆Ω ≈
onde n̂ é o versor perpendicular as ∆S 0 . No limite ∆S 0 → 0, temos
·n̂R̂
dΩ = 2 dS
R
=⇒
Ω=
Z
S
dS 0 n̂
·n̂R̂
d S.
R2
dS
Denotando por r0 o vetor posição de P , a expressão geral fica
Ω=
Z
S
·(r − r0 )n̂
d S.
|r − r0 |2
r̂
O
dΩ
Figura 2.2 Definição de ângulo
sólido
O ângulo sólido total ao redor de um ponto qualquer é 4π sr. Assim, temos que
I
S
·(r − r0 )n̂
d S = 4π.
|r − r0 |2
θ
δθ
Em coordenadas esféricas, d Ω = sen θ d θ d ϕ.
δϕ
Exercício proposto 1. No cubo ilustrado a seguir, determine o ângulo espacial
subtendido pela face azul com respeito ao vértice P .
Figura 2.3 Ângulo sólido em coordenadas esféricas
P
Figura 2.4 Exercício proposto 1
2.3 A Lei de Gauss para o campo elétrico
A famosa Lei de Gauss constitui uma das quatro equações básicas do eletromagnetismo e é talvez a mais importante ferramenta do estudante de eletromagnetismo
a esse nível introdutório. Pode ser obtida diretamente da lei de Coulomb tanto na
forma diferencial quanto na forma integral, embora a primeira exija o domínio
das ideias da teoria de distribuições (o delta de Dirac).
Unifei
Eduardo Resek
46
Capítulo 2 A Lei de Gauss
2.3.1 Determinando diretamente o divergente do campo (opcional)
A lei de Gauss na forma diferencial diz respeito ao divergente do campo elétrico.
Vamos determiná-lo partindo da forma mais genérica possível para o campo
eletrostático,
Z
1
ρ(r0 )(r − r0 )
E=
d v 0,
4π²0 v 0 |r − r0 |3
pois qualquer distribuição de cargas pode ser expressa em termos de alguma
densidade volumétrica ρ. Tomando o divergente, segue
Z
ρ(r0 )(r − r0 )
1
∇·E =
∇·
d v0
0 |3
0
4π²0
|r
−
r
v
Z
1
(r − r0 )
=
d v0
ρ(r0 )∇·
4π²0 v 0
|r − r0 |3
Z
1
ρ(r)
=
ρ(r0 )4πδ(r − r0 ) d v 0 =
,
0
4π²0 v
²0
que é a almejada lei de Gauss. Para expressá-la em forma integral basta integrar
sobre um volume v finito:
Z
Z
Q int
1
∇·E d v =
ρ(r) d v =
,
²0 v
²0
v
e utilizar o teorema de Gauss no primeiro membro. Acima, Q int é a carga total
interna ao volume v. Sendo S a superfície que o delimita, tem-se
I
Q int
E·n̂ d S =
.
²0
S
2.3.2 Calculando o fluxo de uma carga pontual através de uma superfície fechada arbitrária
dS 0 n̂
r̂
dS
q
dΩ
Figura 2.5 Ângulo sólido
Calculemos o fluxo elétrico produzido por uma carga isolada q através de uma
superfície fechada arbitrária que a contém,
I
ΦE = E·n̂ d S
S
Escolhendo a origem do sistema de coordenadas coincidindo com a carga q,
teremos:
I
I
I
q
r̂
q
r·n̂
q
ΦE =
·
n̂
d
S
=
d
S
=
d Ω,
4π²0 S r 2
4π²0 S r 3
4π²0
onde d Ω é o ângulo sólido infinitesimal delimitado pela área d S, em relação à
H
origem O. Como d Ω representa o ângulo sólido total em torno da origem (4π sr),
segue que
I
q
ΦE = E·n̂ d S = .
²0
S
Eduardo Resek
Unifei
2.3 A Lei de Gauss para o campo elétrico
47
Por outro lado, podemos mostrar facilmente que, para uma superfície S que não
engloba a carga q, obteríamos
I
E·n̂ d S = 0.
S, q6⊂S
Vemos pela figura que uma mesma linha de força, subtendendo o mesmo ângulo
sólido, produz um fluxo positivo no elemento de superfície d S quando sai do
corpo, pois o ângulo formado pelo versor normal e o radial é agudo, enquanto
que no elemento d S 0 , onde a linha de força penetra no corpo, o fluxo é negativo,
pois o ângulo entre n̂0 e r̂0 é maior que 90◦ .
Ora, pelo princípio da superposição, segue imediatamente que, para uma distribuição arbitrária de cargas, o fluxo elétrico total através de qualquer superfície
fechada S será proporcional à carga total contida na superfície. Isto é exatamente
a forma integral da lei de Gauss:
I
Z
1
Q int
=
ρ d v,
(2.1)
E·n̂ d S =
²0
²0 v
S
n̂
r̂
dS
r̂0
q
dΩ n̂0
dS 0
Figura 2.6 Carga fora do corpo:
fluxo total é nulo
onde é o v o volume e Q int a carga total (soma algébrica), delimitados pela superfície S, muitas vezes denominada superfície gaussiana. Usando o teorema do
divergente (Gauss), obtemos sucessivamente
¶
I
Z
Z
Z µ
1
ρ
E·n̂ d S = ∇·E d v =
ρ d v =⇒
∇·E −
d v = 0.
²0 v
²0
S
v
v
Como o volume de integração é arbitrário, necessariamente
∇·E =
ρ
,
²0
(2.2)
que é a lei de Gauss na forma diferencial.
Exemplo 2.1 Comprove a lei de Gauss para o fluxo do campo elétrico
de uma carga q na origem do sistema de coordenadas, através de uma
superfície cilíndrica formada pelas superfícies ρ = R e z = ±h/2.
Solução: Sejam 1 e 2 as tampas superior e inferior do cilindro e 3 sua
superfície lateral. Os versores normais a essas superfícies são
n̂1 = ẑ,
n̂2 = −ẑ,
n̂3 = ρ̂.
Em coordenadas cilíndricas, o vetor posição de um ponto qualquer é escrito
como
r = ρ ρ̂ + z ẑ,
e o campo elétrico de uma carga pontual na origem fica
E=
Unifei
1 qr
q(ρ ρ̂ + z ẑ)
=
4π²0 r 3 4π²0 (ρ 2 + z 2 )3/2
Eduardo Resek
48
Capítulo 2 A Lei de Gauss
Os fluxos através dessas superfícies são:
ΦE1 =
E
n̂1
ΦE2 =
E
n̂3
q
q
4π²0
q
4π²0
0
[ρ 2 + (h/2)2 ]3/2
0
0
q
4π²0
[ρ 2 + (h/2)2 ]3/2
0
h/2
Z
ρ d ρ d ϕ,
(ρ ρ̂ − 21 h ẑ)· (−ẑ)
2π Z R
Z
e
ΦE3 =
(ρ ρ̂ + 12 h ẑ)· ẑ
2π Z R
Z
Z
2π
(R ρ̂ + z ẑ)· ρ̂
(R 2 + z 2 )3/2
−h/2 0
ρ d ρ d ϕ,
R dϕdz
Pela simetria, os fluxos através das superfícies ±h/2 serão idênticos: ΦE1 =
ΦE2 . Podemos escrever
ΦE = 2ΦE1 + ΦE3 ,
onde
Z 2π Z R
qh
1
ΦE1 =
ρ dρ dϕ
2
2
3/2
8π²0 0
0 (ρ + h /4)
"
#R
µ
¶
qh
1
h
q
=
−p
1− p
=
4²0
2²0
ρ 2 + h 2 /4
4R 2 + h 2
Figura 2.7 Carga pontual e superfície cilíndrica
0
e
qR 2
ΦE3 =
4π²0
2
=
qR
2²0
Z
h/2
−h/2 0
·
dϕdz
2π
Z
(R 2 + z 2 )3/2
z
p
2
R R2 + z2
¸h/2
=
−h/2
qh
;
p
²0 4R 2 + h 2
O fluxo total perfaz, portanto
ΦE =
q
,
²0
em concordância com a lei de Gauss.
2.4 Aplicações da lei de Gauss
Algumas aplicações óbvias e imediatas da lei de Gauss são:
• forma integral: conhecida a distribuição, determinar o fluxo ΦE do campo
elétrico através de uma superfície fechada, ou em alguns casos, aberta.
• forma integral: conhecido o campo E(r), determinar a carga total contida
em uma certa região do espaço ()delimitada por uma dada superfície).
Eduardo Resek
Unifei
2.4 Aplicações da lei de Gauss
49
• forma diferencial: conhecido o campo E(r), determinar detalhadamente
a distribuição de cargas em cada ponto da região, ou seja sua densidade
volumétrica de cargas ρ(r).
Uma terceira (e talvez a mais importante) aplicação da lei de Gauss na forma
integral, é a de permitir determinar o campo elétrico em todos os pontos de uma
região a partir do conhecimento da distribuição de cargas. Para isso é necessário
que a distribuição seja dotada de certas simetrias que permitam simplificar o
integrando da equação (2.1) de modo a isolar o campo elétrico.
Basicamente, três tipos de simetria podem ser identificados na prática, que
trataremos a seguir.
2.4.1 Simetria esférica
De uma maneira geral, um campo elétrico pode ser escrito em coordenadas
esféricas como
E(r) = E r (r, θ, ϕ) r̂ + E θ (r, θ, ϕ) θ̂ + E ϕ (r, θ, ϕ) ϕ̂
Um campo é dito esfericamente simétrico quando ele possui apenas a componente radial e com intensidade dependente apenas da distância à origem do
sistema de coordenadas (coordenada r ):
t Simetria esférica
E(r) = E (r ) r̂
(2.3)
Nessa situação, se escolhermos uma superfície esférica para a aplicação da lei
de Gauss, para a qual n̂ = r̂, o fluxo do campo elétrico através desta se simplifica
como a seguir:
¯
I
I
I
I
¯
E·n̂ d S = E (r ) |{z}
r̂·r̂ d S = E (r )¯¯ d S = E (r ) d S = E (r )4πr 2 ,
S
S
=1
S
S
S
onde pudemos retirar o módulo do campo para fora do integrando por ser ele
avaliado sobre a superfície gaussiana esférica, onde r é sempre o mesmo e, portanto, E (r ) também. Em problemas que envolvam simetria esférica do campo,
tudo o que precisamos portanto é determinar a carga Q int contida pela superfície
esférica gaussiana que passa em cada ponto de interesse. Então
4πr 2 E (r ) =
Q int
Q int
=⇒ E(r) =
r̂ .
²0
4π²0 r 2
(2.4)
Num problema geralmente é necessário aplicar a lei de Gauss a várias superfícies
gaussianas, uma para cada região fisicamente distinta onde desejamos obter o
campo elétrico.
Unifei
Eduardo Resek
50
Capítulo 2 A Lei de Gauss
Situações de simetria esférica
Quando ocorre esse tipo de simetria? Um caso óbvio é o da carga pontual localizada na origem. Além desse, podemos ter
• Distribuições superficiais de cargas centradas na origem cujas densidades
sejam uniformes.
• Distribuições volumétricas de cargas cujas densidades sejam uniformes ou
dependentes da coordenada r apenas.
• Superposições de todos as possibilidades descritas.
Exemplo 2.2 Uma distribuição de cargas esférica oca, cujos raios interno
e externo são 2a e 3a, respectivamente, encontra-se carregada com carga
total Q distribuída em seu volume de maneira inversamente proporcional à
distância ao seu centro. Exatamente em seu centro, encontra-se uma outra
distribuição esférica, de raio a, cuja carga total é −Q, porém distribuída
uniformemente sobre seu volume. Determine o campo elétrico em todas
as regiões do espaço.
Q
a
−Q
2a
3a
Figura 2.8 Exemplo 2.2: simetria
esférica
Solução: A distribuição de cargas satisfaz aos quesitos de simetria esférica,
isto é, o campo elétrico será da forma E = E (r ) r̂. Temos quatro regiões
distintas claramente delimitadas: r ≤ a, a < r < 2a, 2a ≤ r ≤ 3a e r > 3a.
Para cada uma delas utilizaremos uma superfície gaussiana esférica distinta,
cada qual com um raio adequado a fim de possibilitar-nos calcular o campo
num ponto genérico da respectivamente região. De acordo com a equação
(2.4), devemos simplesmente obter a carga total delimitada pela gaussiana
em cada caso:
a) r ≤ a (superfície gaussiana S 1 ) Nessa região a carga elétrica total (−Q)
se encontra distribuída uniformemente sobre a esfera de volume 43 πa 3 ,
portanto a densidade de cargas ρ 1 é facilmente obtida:
ρ1 =
E = E r̂
n̂ = r̂
r
S1
Figura 2.9 Região 0 ≤ r ≤ a
=−
3Q
.
4πa 3
Entretanto, a carga englobada pela gaussiana S 1 não é, em geral, (−Q),
pois queremos o campo num ponto qualquer da região 0 ≤ r ≤ a, e a
gaussiana deve ser tal como a mostrada na figura 2.9, com raio r menor
que o raio a da esfera. Para essa gaussiana, temos
Z
Qr 3
(−3Q) 4 3
πr
=
−
,
Q int =
ρ1 d v =
4πa 3 3
a3
v1
implicando em
E=−
Eduardo Resek
−Q
4
3
3 πa
Qr
r̂,
4π²0 a 3
r ≤ a.
Unifei
2.4 Aplicações da lei de Gauss
51
b) a < r < 2a (superfície gaussiana S 2 ) Como não há carga na região r > a,
a carga englobada pela gaussiana S 2 será a carga total da esfera de raio
a, isto é:
Q int = −Q
E=−
=⇒
Q
r̂,
4π²0 r 2
n̂ = r̂
r
a < r < 2a.
c) 2a < r < 3a (superfície gaussiana S 3 ) Para determinarmos a carga englobada pela gaussiana S 3 , demos antes obter a densidade de cargas
na região 2a ≤ r ≤ 3a, que não é uniforme, mas varia inversamente
proporcional à distância r ao centro da distribuição, isto é
ρ3 ∝
E = E r̂
S2
Figura 2.10 Região a < r < 2a
1
β
=⇒ ρ 3 = ,
r
r
E = E r̂
onde β é tal que
Z
v3
n̂ = r̂
ρ 3 d v = Q,
r
ou seja,
Z
Q=
0
2π Z π Z 3a
0
2a
·
¸
β 2
1 2 3a
Q
r sen θ d θ d ϕ = β4π r
.
= 10πa 2 β =⇒ β =
r
2
10πa 2
2a
Figura 2.11 Região 2a ≤ r ≤ 3a
A carga delimitada pela gaussiana S 3 é então
2π Z π Z r
Z
Q int = −Q +
0
0
2a
S3
Q
r 02 sen θ 0 d θ 0 d ϕ0
10πa 2 r 0
2
E = E r̂
2
n̂ = r̂
Q
Q(9a − r )
(r 2 − 4a 2 ) = −
2
5a
5a 2
A primeira contribuição refere-se à carga da esfera de raio a, pois ela
também está contida em S 3 ! Resulta
Q int = −Q +
E=−
Q(9a 2 − r 2 )
r̂,
20π²0 a 2 r 2
2a ≤ r ≤ 3a.
r
S4
Figura 2.12 Região r > 3a
d) r > 3a (superfície gaussiana S 4 ) A carga englobada por S 4 é a soma das
cargas totais das duas regiões (r ≤ a e 2a ≤ r ≤ 3a), sendo portanto nula.
Assim
E = 0, r > 3a.
Unifei
Eduardo Resek
52
Capítulo 2 A Lei de Gauss
2.4.2 Simetria cilíndrica
De uma maneira geral, um campo elétrico pode ser escrito em coordenadas
cilíndricas como
E(r) = E ρ (ρ, ϕ, z) ρ̂ + E ϕ (ρ, ϕ, z) ϕ̂ + E z (ρ, ϕ, z) ẑ.
Diz-se que um campo possui simetria cilíndrica quando ele possui apenas a
componente radial e com intensidade dependente apenas da distância ao eixo z
do sistema de coordenadas (coordenada ρ):
u Simetria cilíndrica
E(r) = E (ρ) ρ̂
(2.5)
Nessa situação é natural escolhermos uma superfície cilíndrica para a aplicação
da lei de Gauss. O cilindro deve ser coaxial ao eixo de simetria da distribuição
(eixo z) e passar pelo ponto onde desejamos determinar o campo elétrico. Ainda,
embora as distribuições de cargas que exibam esse tipo de simetria sejam teoricamente infinitas em extensão (na dimensão paralela ao eixo z), a superfície
gaussiana precisa ser fechada, de modo que devemos atribuir um comprimento
finito arbitrário ` a esse cilindro gaussiano. Para determinarmos o fluxo através
dessa gaussiana, dividimo-la em três partes: as faces planas (base e topo) e a face
lateral. Para as faces planas,
n̂ = ±ẑ =⇒ E·n̂ = E (ρ) ρ̂·(±ẑ) = 0,
isto é, não há fluxo através delas. Para a superfície lateral (S ` ) temos
Z
Z
Z
E·n̂ d S ` =
E (ρ) ρ̂·ρ̂ d S ` = E (ρ)
d S ` = 2πρ`E (ρ).
|{z}
S`
S`
S`
1
Observe que, como o campo depende apenas de ρ, E (ρ) se torna uma constante
na integração acima, pois a superfície em questão é a lateral do cilindro, na qual
ρ tem um valor fixo. Assim, o campo pode ser facilmente calculado pela lei de
Gauss:
Q int
E(r) =
ρ̂
(2.6)
2π²0 ρ`
Situações de simetria cilíndrica
Quando ocorre esse tipo de simetria? Já vimos (seção 1.10.2) um caso que apresenta esse tipo de simetria: o do fio retilíneo infinito uniformemente carregado.
Além desse, podemos ter
• Cascas cilíndricas infinitas com eixo coincidente com z cujas densidades
sejam uniformes.
• Cilindros infinitos cujas densidades sejam uniformes ou dependentes da
coordenada ρ apenas.
Eduardo Resek
Unifei
2.4 Aplicações da lei de Gauss
53
• Superposições de todos as possibilidades descritas.
Exemplo 2.3 Fio retilíneo infinito uniformemente carregado com densidade linear de cargas λ.
S
`
+
++
++
++
++
+
++
++
++
++
+
+
++
++
++
++
+
+
++
++
++
++
+
+
++
++
++
++
+
+
++
++
++
++
+
+
++
++
++
++
+
++
++
++
++
+
+
ρ
ρ
λ
n̂
E
Figura 2.13 Superfície gaussiana cilíndrica para a linha infinita
Utilizamos nesse caso uma superfície gaussiana cilíndrica tal como a da
figura. A lei de Gauss se aplica a superfícies fechadas, de modo que a superfície gaussiana deverá ser necessariamente fechada. É necessário atribuir
um comprimento arbitrário ao cilindro que escolhemos como gaussiana,
mas não se preocupe: o resultado final obviamente não dependerá do comprimento adotado. Não haverá fluxo sobre as tampas do cilindro, haja vista
que E é perpendicular ao fio (ao eixo do cilindro, portanto na direção de
ρ̂) e portanto nenhuma linha de força as atravessa (matematicamente, os
versores normais às tampas são ±n̂, e ±n̂·ρ̂ = 0). Sobre a superfície lateral
I
Z
Z
Z
E·n̂ d S =
E·n̂ d S ` =
E (ρ) ρ̂·ρ̂ d S ` = E (ρ)
d S ` = E (ρ)2πρ`.
S
S`
S`
S`
A carga contida por esta gaussiana é aquela do fio carregado que se encontra
dentro dos limites delimitados pelas tampas do cilindro, Q int = λ`, donde
decorre imediatamente
λ
E=
ρ̂
2π²0 ρ
2.4.3 Simetria cartesiana ou plana
Esse tipo de simetria ocorre quando um campo apresenta componente ao longo
de uma direção fixa do espaço, dependendo apenas da coordenada ao longo daquela direção. Podemos tratar tal simetria em coordenadas cartesianas, de modo
Unifei
Eduardo Resek
54
Capítulo 2 A Lei de Gauss
que o campo poderia ter como expressão, escolhendo a sua direção coincidindo
com a de algum dos eixos coordenados:
E = E (x) x̂,
E = E (y) ŷ,
ou
E = E (z) ẑ.
ou
Esse tipo de simetria ocorrerá apenas para uma distribuição que seja de extensão
infinita paralelamente a um dos planos coordenados, ou seja
• um plano infinito carregado uniformemente;
• uma camada de cargas de extensão plana infinita e espessura finita uniforme, cuja densidade volumétrica dependa apenas da coordenada perpendicular às suas superfícies planas.
• Superposições dessas possibilidades descritas.
Exemplo 2.4 Plano infinito carregado uniformemente com densidade
superficial de cargas σ.
E
n̂
S1
+
++
+++
++++
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
++++
+++
++
+
E
n̂
Qint = σA
+
++
+++
++++
S2
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
++++
+++
++
+
n̂
E
Figura 2.14 Superfície gaussiana para um plano infinito
Escolhemos o eixo z perpendicularmente ao plano e uma superfície gaussiana cilíndrica de seção reta A tal como a da figura, disposta de tal forma a
ser perpendicular ao plano de cargas e que suas tampas estejam à mesma
distância do plano carregado. Desse modo, não haverá fluxo através das
paredes laterais do cilindro, pois n̂ = ρ̂ e E = E ẑ. Através das duas faces os
fluxos serão iguais, pois
Z
Z
Z
E·n̂ d S 1 =
E (z) ẑ·ẑ d S 1 = E (z)
d S 1 = E A,
S1
Eduardo Resek
S1
S1
Unifei
2.5 Condutores em equilíbrio eletrostático
55
e, para a tampa inferior, o campo tem sentido oposto ao da região acima
do plano, mas mesmo módulo, já que escolhemos a gaussiana com suas
tampas equidistantes do plano. Assim
Z
Z
Z
E·n̂ d S 2 =
E (−z) (−ẑ)·ẑ d S 2 = E (z)
d S 2 = E A,
S1
S2
S2
O fluxo elétrico total através da gaussiana é então 2E A. A carga total delimitada por ela é
Z
Q int =
S
σ d S = σA,
de modo que a magnitude do campo será
E=
σ
.
2²0
A direção do campo é normal ao plano, seu sentido sempre saindo do plano
(supondo a carga positiva). Denotando tal versor por n̂, escrevemos
E=
σ
n̂.
2²0
É interessante observar que, ao se passar de um lado para o outro do
plano, o campo elétrico sofre uma descontinuidade de σ/²0 . Isso não
é coincidência, mas um caso particular de uma das condições de contorno
genéricas que governam o comportamento do campo elétrico ao redor da
superfície de separação entre dois meios distintos.
2.5 Condutores em equilíbrio eletrostático
++
+++
+++ + + + + + +
++
E = E n̂
+
++
+ +++++++
++
+
++ +
+
++
E=0
Qint = 0
E
++
++
+
++
S
+
++
++
E
++
+++
+++ + + + +
++
+
+
(2.7)
+
+
++
++
+
++
+++++
E=0
E
+
Um condutor possui cargas com liberdade de movimento que podem responder
prontamente a estímulos externos aplicados. Por exemplo, conectando os terminais de uma bateria a um condutor será estabelecida uma corrente elétrica
através dele, que durará enquanto estiver aplicada a tensão pela bateria. Uma vez
desligada a bateria, entretanto, não há mais uma fonte externa de energia capaz
de manter o movimento dos elétrons, e a corrente eventualmente cessará. Essa
situação (ausência de fontes externas de energia) é denominada equilíbrio eletrostático. É claro que, uma vez atingido o equilíbrio eletrostático, não pode haver
campo elétrico no interior do condutor, pois do contrário esse campo provocaria
correntes elétricas em seu interior.
σ
1
Figura 2.15 Não há
campo no interior de um condutor em equilíbrio
eletrostático!
Podemos concluir também que não pode haver cargas no interior do condutor em
equilíbrio. Para um condutor em equilíbrio tal como o da figura, considere uma
superfície S inteiramente interna ao condutor, tal como a ilustrada. A aplicação
Unifei
Eduardo Resek
56
Capítulo 2 A Lei de Gauss
da lei de Gauss mostra imediatamente que a carga por ela delimitada tem que ser
nula:
I
Q int = ²0 E·n̂ d S = 0,
+
+++
+++ + + + + + +
-- -
- - --
-----------
q
++
+
++
+++++
---------
--------------------
+
++
++
E
++
++
0 pois o campo é nulo em todos os pontos de S (interior do condutor). Desse
modo, qualquer carga em excesso obrigatoriamente se distribuirá sobre a superfície externa do condutor, na situação de equilíbrio.
Mesmo que o condutor possua uma cavidade e dentro dessa cavidade exista
uma carga q, o campo no interior do condutor deve ser nulo na situação de
equilíbrio. Como a carga interna à gaussiana deve ser nula, isso significa que
na superfície da cavidade será induzida uma carga exatamente oposta à carga
existente na cavidade, pois não pode haver carga em excesso no volume do
condutor:
I
Q int = ²0 E·n̂ d S = q + q ind = 0
=⇒
q ind = −q.
E
S
++
++
+++
+++ + + + +
+
S
E = E n̂
+
E=0
-------------Qint = 0
+
---- ------------
+ +++++++
++
++ +
++
++
++
++
+
++
+
+
E
++
+
+
σ
1
Figura 2.16 Condutor
oco
t Indução de carga numa
cavidade do condutor
S
Na superfície externa poderá haver uma distribuição superficial de cargas
σ, já que não pode haver cargas no volume interno do condutor. Pode também
existir um campo elétrico não nulo na superfície, desde que este não possua componentes tangenciais à superfície: se houvesse componente do campo tangente
à superfície, haveria correntes superficiais, contrariando a hipótese de equilíbrio.
Desse modo, na superfície
E = E n̂,
+
++
+
+++
+
+++
+
++
++
++
σ
++
++
+
++
++
++
++
+
++
++
++
++
+++
++
A
++
+
+++
+
++
++
+
++
E
++ + + +
Figura 2.17 Campo próximo à
superfície
ou seja, o campo é sempre perpendicular à superfície em cada ponto. É possível
até estabelecer uma relação entre o campo muito próximo à superfície externa
com a densidade superficial de cargas no local. Utilizamos para isso uma pequena superfície cilíndrica tal como a da figura, disposta de forma a atravessar a
superfície do condutor perpendicularmente, e de seção reta A tão pequena que
podemos: i) desprezar a curvatura local da superfície do condutor; ii) considerar
a densidade σ e o campo E praticamente uniformes nesse local. A face plana da
gaussiana que se encontra fora do condutor deve estar arbitrariamente próxima
da superfície deste, mas não coincidindo com ela. Só haverá fluxo através desta
face, pois a outra face plana e a superfície lateral estão dentro do condutor, onde
o campo é nulo:
I
Z
S
E·n̂ d S =
S1
E n̂·n̂ d S = E A.
Por outro lado, a carga delimitada pela gaussiana encontra-se na superfície do
condutor:
Z
Q int = σ d S = σA.
S
A lei de Gauss então fornece
u Campo próximo à superfície do condutor
Eduardo Resek
E=
σ
n̂
²0
(2.8)
Unifei
2.5 Condutores em equilíbrio eletrostático
57
Questões sobre o Capítulo 2: A Lei de Gauss
Q2.1
Explique a diferença entre potencial elétrico e energia potencial eletrostática.
Q2.2
Uma carga positiva é liberada, em repouso, num campo elétrico. A
carga se desloca para a região de potencial elétrico mais alto ou mais
baixo?
Q2.3
Se o potencial elétrico for constante numa região do espaço, o que se
pode dizer sobre o campo elétrico nessa região?
Q2.4
~ for conhecido num único ponto, é possível determinar V nesse
Se E
ponto?
Q2.5
Em que direção será possível um deslocamento num campo elétrico
de modo que não haja alteração do potencial elétrico?
Q2.6
O campo elétrico que aparece na lei de Gauss,
I
q
E·n̂ d S = ,
²0
S
é devido à presença da carga q?
Q2.7
Suponha que seja nula a carga total contida no interior de uma superfície gaussiana. Podemos concluir, da Lei de Gauss, que o campo
deva ser zero em todos os pontos da superfície? Será verdadeira a recíproca desta afirmação, isto é, se E for nulo em todos os pontos de uma
superfície fechada, então também é nula a carga total nela contida?
Q2.8
Um condutor oco, grande e isolado está carregado com +q. Através
de uma pequena abertura no topo desse condutor, introduz-se uma
pequena esfera metálica de carga −q, a qual permite-se que toque a
superfície interna do condutor, sendo então retirada. Quais serão as
cargas no condutor e na esfera depois disso?
Q2.9
Aplicando-se a lei de Gauss a um condutor isolado em equilíbrio eletrostático, pode-se concluir que todos os elétrons de condução deste
se encontram necessariamente em sua superfície?
Q2.10
Com base na mesma análise, pode-se concluir que os elétrons existentes na fiação elétrica de uma casa se deslocam ao longo das superfícies
desses fios? Em caso negativo, por que não?
Unifei
Eduardo Resek
58
Capítulo 2 A Lei de Gauss
Problemas do Capítulo 2: A Lei de Gauss
P2.1
Duas cargas de −10 µC e 20 µC encontram-se separadas por uma distância de 20 cm. Onde deve ser colocada uma terceira carga de modo
que, sob a ação dessas duas, fique em repouso? Resp: Ao longo da reta suporte
das duas cargas, a 48,5 cm da carga negativa e 68,5 cm da positiva
P2.2
Determinar a densidade volumétrica de cargas na origem quando:
a) E = x 2 y 2 z 2 x̂ + 9 sen y ŷ + (y + z)ẑ N/C Resp: ρ(0) = 88,5 pC/m2
b) E = 2ρ 2 sen ϕ ρ̂ + 3ρ 2 sen ϕ ϕ̂ + 7z ẑ N/C Resp: ρ(0) = 62,0 pC/m2
c) E = 3r 2 sen ϕ r̂ + 2r 2 sen θ cos ϕ θ̂ + 5r 2 sen θ sen ϕ ϕ̂ N/C. Resp: ρ(0) =
0
P2.3
Uma região do espaço está impregnada com carga elétrica de tal modo
E0ρ2
E0R
ρ̂, para ρ ≤ R e E =
ρ̂,
que o campo elétrico nela é dado por E =
2
R
ρ
para ρ > R, onde ρ̂ é o versor perpendicular ao eixo de simetria da distribuição, e R e E 0 são constantes.
a) Que tipo de simetria possui esta distribuição?
b) Determinar a densidade volumétrica de cargas nas regiões ρ ≤ R e
ρ > R.
c) Determinar a carga total contida entre os planos z = 0 e z = L desta
região, supondo que o meio
seja o vácuo.
(
Resp: a) Cilíndrica.
c) Q = 2π²0 RLE 0 .
P2.5
Um bloco condutor tem em seu interior uma cavidade de formato
qualquer. Um pequeno corpo com carga elétrica q é introduzido nesta
cavidade. Provar que a carga induzida na superfície interior do condutor é −q.
P2.6
Na figura ao lado o cubo de aresta a = 10 cm está imerso numa região
onde o campo é descrito por E = bx 1/2 x̂, com b = 800 V/m3/2 . Determine:
a) O fluxo através do cubo. Resp: ΦE = 1,05 V.m
b) A carga em seu interior. Resp: Q i = 9,27.10−12 C
c) A densidade de cargas em cada vértice do cubo. Resp: ρ(x = a) = 11,2 nC/m3 , ρ(x = 2a) = 7,9 nC/
a
Eduardo Resek
ρ≤R
ρ>R
Três cargas pontuais q 1 = 2,5 µC, q 2 = −1,5 µC e q 3 = 4,0 µC estão localizadas respectivamente nos pontos P 1 (1, 0, 0), P 2 (1, 2, 2) e P 3 (−1, 1, −1),
com todas as coordenadas dadas em metros. Além disso, há um arame
infinito muito fino, carregado com uma densidade linear de cargas
λ não uniforme e situado sobre o eixo z deste sistema de coordenadas. Calcule o fluxo elétrico através da superfície esférica dada por
x 2 + y 2 + z 2 = R 2 nos seguintes casos:
a) λ = 0,75 |z| µC/m e R = 2 m.
Resp: ΦE = 1,1.106 V.m
b) λ = 0,75 z µC/m e R = 3,5 m.
Resp: ΦE = 0,56.106 V.m
x
Figura 2.18 Problema 2.6
3²0 E 0 ρ
,
R2
0,
P2.4
y
z
b) ρ v (ρ) =
Unifei
2.5 Condutores em equilíbrio eletrostático
P2.7
59
Um cilindro não condutor, de raio a, se encontra uniformemente carregado com uma densidade volumétrica de cargas ρ v . Determine o
campo E em pontos externos (ρ > a) e internos (0 < ρ < a) ao cilindro.
Exprima os resultados também em termos de λ (carga por unidade de
comprimento).
(0 < ρ < a).
Resp: E =
λ
ρv ρ
ρv a2
λρ
ρ̂ =
ρ̂, para ρ > a e E =
ρ̂, para
ρ̂ =
2²0 ρ
2π²0 ρ
2²0
2π²0 a 2
P2.8
Uma camada infinita de cargas com densidade uniforme σ = 12²0 (C/m2 )
está localizada na superfície definida por 2x − y + 2z = 4, num sistema
de coordenadas no vácuo. Calcular o campo elétrico E em todos os
pontos do espaço. Resp: E = ±(4x̂ − 2 ŷ + 4ẑ)N/C
P2.9
Uma carga Q é distribuída uniformemente ao longo do volume de uma
esfera de raio R. Determine:
a) o campo E em pontos externos (r > R) e internos (r < R) à esfera.
b) o potencial em pontos externos (r > R) e internos (r < R) à esfera.
Resp: Para r > R, E =
P2.10
r̂
V (r ) =
Q
Qr
r̂
, para r ≤ R, E =
4π²0 r
4π²0 R 3
V (r ) =
Para r > a, E = 0, para r ≤ a, E =
Ze
4π²0 r 2
8π²0 R 3
r3
(1 − 3 )r̂.
a
Qr
4π²0 R
πR
4π²0 r
(4R − 3r )r̂.
4
Uma esfera oca de raio interno a e raio externo 2a está carregada com
uma carga distribuída não uniformemente de acordo com a equação
ρ v = Ar 2 , sendo A uma constante conhecida. Determinar o campo
5
~ em todas as regiões do espaço. Resp: E = A (r 3 − a )r̂
eletrostático E
5²0
P2.13
Q(3R 2 − r 2 )
Uma carga Q é distribuída num volume esférico de raio R com densidade de carga dada por ρ v = A(R − r ) (C /m 3 ). Determinar:
a) A em termos de Q e R. No S.I., qual é sua unidade?
~ em todas as regiões do espaço (dentro e
b) O campo eletrostático E
3Q
Q
fora da região esférica). Resp: a) A = 4 (C /m 4 ). b) Para r > R, E =
r̂, e para
2
r ≤ R, E =
P2.12
4π²0 r 2
Em um modelo atômico para o Ferro (Fe) cujo número atômico é
Z = 26, considerou-se o seu núcleo, de carga +Z e (e a carga fundamental), puntiforme e envolvido por uma “nuvem"de elétrons, de
carga −Z e, uniformemente distribuída em uma região esférica de raio
~ dentro e fora deste
a. Determine o campo e o potencial elétrico E
átomo. Resp:
P2.11
Q
r2
Uma distribuição volumétrica de cargas é dada em coordenadas esféricas por ρ = ρ 0 a/r .
aρ 0
a) Use a lei de Gauss para calcular E;
Resp: E =
r̂
2²0
b) A partir do resultado obtido em (a), determine V (r ), tomando V = 0
aρ r
em r = 0. Resp: − 0
2²0
P2.14
Unifei
Se o campo elétrico no ar atmosférico for da ordem de 3 × 106 N/C, o
ar se ioniza e se torna condutor. O valor do campo em que ocorre esta
Eduardo Resek
60
Capítulo 2 A Lei de Gauss
ionização é a rigidez dielétrica do ar. Imaginemos que uma carga de
18 µC seja colocada numa esfera condutora. Qual o raio mínimo da
esfera que pode reter essa carga, no ar, sem haver ionização?
P2.15
a
b
c
Figura 2.19 Problema 2.15
Uma esfera de raio a possui uma distribuição de cargas esfericamente
simétrica dada por:
a
ρV = ρ 0 ,
r
onde ρ 0 é uma constante. Esta distribuição está concentricamente
envolvida por uma camada metálica esférica de raios interno e externo
respectivamente iguais a b e c, sendo b > a. Determine E nas seguintes
regiões:
a.1) r ≤ a
a.2) a < r < b
a.3) b < r < c
b) A leitura de um voltímetro cujos terminais são colocados em contato
com o centro e a superfície externa da camada metálica (V0 − Vc ).
c) A densidade de cargas na superfície interna da camada metálica. Resp:
a.1) E =
P2.16
ρ0 a
r̂
2²0
a.2) E =
ρ0 a3
2²0 r 2
r̂
a.3) E = 0
b) ∆V =
ρ0 a2
(2b − a)
2²0 b
c) σ = −
ρ0 a3
2b 2
Numa certa região do espaço o campo elétrico possui componentes
E x = ax 2 y
E y = x3 + y
E z = 0,
onde x, y e z são dados em metros e E em V/m.
a) Determine a constante a para que o campo acima seja eletrostático.
b) Determine a diferença de potencial entre a origem e o ponto x =
3, y = 0, z = 0.
c) Determine a diferença de potencial entre a origem e o ponto x =
0, y = 2, z = 1.
P2.17
Em suas célebres experiências de 1906 que levaram à descoberta do núcleo atômico, Rutherford bombardeou uma fina folha de ouro (número
atômico 79) com partículas α (núcleos de He, de carga 2e), produzidas
por uma fonte radioativa, e observou que algumas delas chegavam a
ser defletidas para trás. A energia cinética inicial das partículas α era
de 7,69 MeV. Considere uma colisão frontal entre uma partícula α e
um núcleo de ouro, na qual ela é retroespalhada. Qual é a distância de
mínima aproximação entre as duas partículas carregadas? Rutherford
estimou que o raio do núcleo deveria ser da ordem dessa distância.
Resp: 3 × 10−14 m
Eduardo Resek
Unifei
Capítulo 3
Potencial eletrostático
Objetivos
Ao final desse capítulo, você deverá ser capaz de:
a)
b)
c)
d)
e)
f)
g)
h)
i)
j)
k)
l)
m)
n)
o)
Caçcular o trabalho de uma força através de sua integral de linha.
Definir campos conservativos e energia potencial.
Mostrar que o campo eletrostático é conservativo.
Reconhecer se um determinado vetor pode representar um campo eletrostático.
Determinar a energia potencial elétrica de uma carga pontual imersa num
campo elétrico ezxterno.
Aplicar o teorema da conservação da energia para determinar o movimento
de cargas aceleradas por um campo eletrostático.
Definir potencial eletrostático tanto a partir da energia potencial como do
campo elétrico.
Calcular o potencial eletrostático produzido por um distribuição de cargas.
Calcular o campo elétrico a partir do potencial eletrostático e vice-versa.
Explicar o cmportamento da função potencial em um condutor em equilíbrio
eletrostático.
Determinar a energia potencial elétrica de uma distribuição de cargas em
termos do campo elétrico causado por ela.
Definir dipolo elétrico e momento de dipolo elétrico.
Calcular momento de dipolo elétrico de uma distribuição contínua de cargas.
Explicar como um dipolo interage com um campo externo, calculando força e
torque sofridos por ele.
Determinar potencial e campo elétrico produzidos pelo dipolo elétrico, a
grandes distâncias dele.
61
62
Capítulo 3 Potencial eletrostático
3.1 Campos conservativos
F
B
3.1.1 Trabalho de uma força
O trabalho realizado por uma força F sobre uma partícula ao transportá-la de um
ponto a outro no espaço ao longo de uma trajetória ` é
dr
`
Z
W A→B,` =
A
Figura 3.1 Trabalho de uma força
B
F· d r,
A,`
onde d r é um deslocamento infinitesimal tangente à curva ` em cada ponto. De
uma maneira geral, esse trabalho poderá depender da trajetória trilhada pela
partícula entre um ponto e outro, de modo que
F
Z
B
dr
`1
F
dr
A
`2
Figura 3.2 Trabalho de uma força
ao longo de trajetórias distintas
W A→B,`1 =
B
A,`1
B
Z
F· d r 6= W A→B,`2 =
F· d r.
A,`2
Exemplos de tais forças são as de atrito ou qualquer outro tipo de força dissipativa.
Entretanto, para uma classe importante de forças na natureza, esse trabalho é
independente da trajetória. Essas forças são denominadas conservativas. Exemplos importantes foram estudados no curso de Física I: força gravitacional, força
elástica de mola, etc.
3.1.2 Campo conservativo e energia potencial
De uma maneira geral, um campo F (não necessariamente representando uma
força) é denominado conservativo se sua integral de linha de um ponto a outro
no espaço é a mesma qualquer que seja a trajetória trilhada do ponto inicial ao
final, ou seja, é completamente independente da trajetória:
Z
B
A,`1
Z
F· d r =
B
F· d r,
A,`2
∀`1 , `2 .
Então, se formos de A a B através de `1 e voltarmos de B até A ao longo de `02 , a
trajetória inversa de `2 , a integração no percurso de volta terá o mesmo resultado
do percurso de ida, só que de sinal oposto. Assim, a integral completo no percurso
fechado é nulo:
I
F·d r = 0, ∀`,
`
qualquer que seja o percurso fechado. Uma forma equivalente de expressar que
o campo é conservativo surge se aplicarmos o teorema de Stokes à circulação
acima. De acordo com esse teorema, a circulação de um vetor é igual ao fluxo do
rotacional desse vetor através de qualquer superfície delimitada pelo percurso
fechado em questão:
I
Z
F·d r = ∇×F·n̂ d S = 0 =⇒ ∇×F = 0.
`
Eduardo Resek
S
Unifei
3.1 Campos conservativos
63
Vimos também que é nulo o rotacional do gradiente de qualquer função escalar
cujas segundas derivadas existam; é sempre possível portanto, encontrar uma
função escalar Ψ cujo gradiente coincida com o campo F,
F = ∇Ψ.
Fisicamente, se F representar uma força, essa função tem o significado físico
de energia potencial associada ao campo conservativo em questão. De fato,
definimos a variação da energia potencial sofrida por uma partícula, quando
deslocada de um ponto a outro no espaço, como o trabalho realizado por um
agente externo para transportá-la entre os referidos pontos sem aceleração!, pois se
houver aceleração poderá haver uma mudança na velocidade escalar da partícula,
tendo como consequência uma variação também de sua energia cinética.
Z B
∆U AB = ∆U A→B = U (B ) −U (A) =
FAgExt · d r.
A,`
Ora, para transportar a partícula sem aceleração, é necessário que a força desenvolvida pelo agente externo seja exatamente oposta à do campo, para que a força
resultante seja nula:
FAgExt = −F.
Assim
∆U AB = −
B
Z
F· d r.
A,`
Por outro lado, vimos que
∆Ψ AB =
Z
B
A
∇Ψ· d r,
mostrando que, identificando Ψ com −U , decorre
Z B
Z B
∆U AB =
∇U · d r = −
F· d r =⇒ F = −∇U .
A,`
A,`
3.1.3 Campo eletrostático é conservativo!
Pode-se mostrar facilmente que o campo elétrico, tal como definido acima (lei de
Coulomb, eq. (1.12)), é irrotacional:
Z
Z
1
ρ(r0 )(r − r0 )
1
(r − r0 )
0
0
∇×E =
∇×
d
v
=
ρ(r
)∇×
d v0
4π²0
|r − r0 |3
4π²0 v 0
|r − r0 |3
v0
Usando a identidade vetorial ∇×( f A) = ∇ f ×A + f ∇×A, tem-se
∇×
(r − r0 )
1
1
=∇
×(r − r0 ) +
∇×(r − r0 )
|r − r0 |3
|r − r0 |3
|r − r0 |3 | {z }
=0
O primeiro termo do segundo membro também é nulo porque
∇
Unifei
1
(r − r0 )
=
−3
|r − r0 |3
|r − r0 |5
Eduardo Resek
64
Capítulo 3 Potencial eletrostático
=⇒ ∇
1
3
×(r − r0 ) = −
(r − r0 )×(r − r0 ) = 0,
0
3
|r − r |
|r − r0 |5
logo
∇×
(r − r0 )
= 0,
|r − r0 |3
o que implica
∇×E = 0.
(3.1)
Como, para qualquer função escalar ϕ(r) com segundas derivadas, ∇×∇ϕ(r) =
0, o resultado acima indica que sempre existirá alguma função escalar para a qual
se possa escrever
E(r) = −∇V (r).
(3.2)
A função V (r) é denominada potencial eletrostático.
É fácil mostrar que o potencial devido a uma carga pontual q localizada em r0
é
1
q
V (r) =
.
(3.3)
4π²0 |r − r0 |
Para tal, basta observar que
1
r
1
r − r0
1
=
−
.
∇ = − 2 r̂ = − 3 =⇒ ∇
r
r
r
|r − r0 |
|r − r0 |3
Isso mostra que o campo elétrico de uma carga pontual fora da origem pode ser
escrito como
µ
¶
1 q(r − r0 )
1
1
1
q
E=
=−
q∇
= −∇
,
4π²0 |r − r0 |3
4π²0
|r − r0 |
4π²0 |r − r0 |
o que comprova a assertiva acima. Por outro lado,
Z
v0
ρ(r0 )(r − r0 )
d v0 = −
|r − r0 |3
Z
v0
ρ(r0 )∇
1
d v 0 = −∇
|r − r0 |
µZ
v0
¶
ρ(r0 )
0
d
v
,
|r − r0 |
mostrando que, para uma distribuição genérica de cargas:
"
#
Z
Z
Z
N
X
qj
σ(r0 )
λ(r0 )
1
ρ(r0 )
0
0
0
dv +
dS +
dl ,
V (r) =
+
0
0
0
4π²0 j =1 r − r0 j
v 0 |r − r |
S 0 |r − r |
l 0 |r − r |
(3.4)
Integrando ((3.2)), obtem-se
Z r
Z r
Z r
E(r0 )· d r0 = −
∇V · d r0 = −
dV,
(3.5)
onde r0 é um ponto tomado como referência para o potencial. Assim
Z r
V (r) − V (r0 ) = −
E(r0 )· d r0
(3.6)
r0
r0
r0
r0
Eduardo Resek
Unifei
3.2 Condutores em Equilíbrio Eletrostático
65
Se, por outro lado, considerarmos uma superfície aberta arbitrária, podemos
escrever a partir de (3.1) (n̂ é um versor perpendicular à superfície S em cada
ponto desta):
Z
∇×E· n̂ d S = 0,
S
o que, pelo teorema de Stokes acarreta
I
E ·d r = 0,
(3.7)
`
onde l é o perímetro de S. Considerando uma carga q sendo transportada ao
longo deste percurso fechado, o trabalho realizado pelo campo elétrico sobre ela
é nulo (o campo eletrostático é conservativo).
Podemos associar ao campo eletrostático uma energia potencial U (r). Como a
energia potencial é o trabalho realizado contra o campo, a relação entre potencial
e energia potencial eletrostática claramente é
U = qV
(3.8)
3.2 Condutores em Equilíbrio Eletrostático
Vimos que o campo elétrico no interior de condutores em equilíbrio eletrostático
é necessariamente zero e, na sua superfície, perpendicular à ela. Assim, a diferença de potencial entre quaisquer dois pontos no interior do condutor ou sua
superfície é nula. Isso significa que todo o condutor em equilíbrio se encontra
a um único potencial, não necessariamente zero, definindo o que poderíamos
denominar uma região equipotencial.
V = cte,
no interior e superfícies de condutores em equilíbrio.
Exemplo 3.1 Determinar a diferença de potencial entre o centro e um
ponto da camada externa da distribuição de cargas descrita no exemplo
2.2.
Solução: A distribuição possui simetria esférica, de modo que E = E (r ) r̂.
Assim, o potencial será também função apenas de r , V = V (r ). A diferença
de potencial entre dois pontos é dada pela integral de linha do campo
elétrico. Sendo O a origem (r = 0) e C um ponto da superfície externa da
distribuição (r = 3a), temos
∆V = VO − VC = V (0) − V (3a) = −
Z
0
E dr
Unifei
3a
Z
E·
d }r =
| {z
3a
E d r.
0
Eduardo Resek
66
Capítulo 3 Potencial eletrostático
É necessário dividir o cálculo em três regiões: 0 ≤ r ≤ a, a < r ≤ 2a e
2a < r ≤ 3a, onde em cada uma delas devemos utilizar o campo obtido na
solução do exemplo 2.2. Fica
∆V =
a
Z
0
(−Q)r
dr +
4π²0 a 3
Z
2a
a
(−Q)
dr +
4π²0 r 2
3a
Z
2a
(−Q)(9a 2 − r 2 )
d r.
20π²0 a 2 r 2
Um cálculo direto conduz a
∆V = −
5Q
24π²0 a
Exemplo 3.2 Considerando o disco vazado do exemplo da seção 1.10.1,
determine o potencial e (novamente) o campo elétrico num ponto do eixo
de simetria do disco. Se soltarmos uma partícula de massa m e carga Q
de mesma natureza que a do disco em repouso no ponto (0, 0, a), com que
velocidade ela chegará ao infinito? Se a carga for negativa, que tipo de
movimento ela executará? Quais as condições para que o movimento seja
harmônico? Nesse caso, qual será a frequência do movimento?
Solução: O potencial produzido pelo disco num ponto qualquer é dado
por
Z
1
σ(r0 )
V (r) =
d S0,
4π²0 S 0 |r − r0 |
onde r0 é o vetor posição de um elemento de carga genérico da distribuição.
Desejamos obter o campo e potencial num ponto qualquer do eixo de
simetria do disco, que escolhemos como sendo o eixo z:
r0 = ρ 0 ρ̂ 0 =⇒ r − r0 = z ẑ − ρ 0 ρ̂ 0 ,
r = z ẑ,
|r − r0 | = (z 2 + ρ 02 )1/2 .
A densidade de cargas já foi determinada na seção 1.10.1:
σ(ρ 0 ) =
Q
,
2π(b − a)ρ 0
de modo que
V (z) =
1
4π²0
2π Z b
Z
0
a
Q
Q
ρ 0 d ρ 0 d ϕ0 =
0
2
02
1/2
4π²0 (b − a)
2π(b − a)ρ (z + ρ )
Z
d ρ0
b
a
(z 2 + ρ 02 )1/2
resultando
!
Ã
p
h
i
p
p
Q
Q
b + z2 + b2
2
2
2
2
V (z) =
ln(b+ z + b )−ln(a+ z + a )) =
ln
p
4π²0 (b − a)
4π²0 (b − a)
a + z2 + a2
Eduardo Resek
Unifei
3.2 Condutores em Equilíbrio Eletrostático
67
O campo elétrico é obtido através do gradiente:
E = −∇V =
∂V
ẑ,
∂z
e somos levados ao mesmo resultado anterior (obviamente):
µ
¶
Q
b
a
E(z) = ẑ
−p
.
p
4π²0 (b − a)z
z2 + b2
z2 + a2
Na análise do movimento das cargas, vamos tomar b = 2a para facilitar
o algebrismo. Se uma carga for abandonada no campo do disco, que é
conservativo, seu movimento se dará com energia total constante. No
ponto inicial da trajetória ela se encontrava em repouso (energia cinética
nula), enquanto sua energia potencial pode ser obtida de (3.8)
Ã
p
p !
Q2
2a + a 2 + 4a 2
Q2
2+ 5
Ui = qV (a) =
ln
=
ln
p .
p
4π²0 a
4π²0 a
1+ 2
a + a2 + a2
À medida que a carga se distancia do disco, sua energia cinética aumenta
e sua energia potencial diminui. A uma distância muito grande do disco
(virtualmente infinita), a partícula terá atingido sua velocidade terminal e
sua energia potencial se anulará:
U= E c f ,
v
Ã
Ã
u
p !
p !
2
u
1
5
1
Q
2
+
2+ 5
2
t
=⇒ v = Q
mv =
ln
ln
p
p .
2
4π²0 a
2π²0 am
1+ 2
1+ 2
O argumento que utilizamos foi de natureza bastante física, pois uma
distribuição finita de cargas necessariamente produz um potencial nulo
no infinito. Entretanto, como não poderia deixar de ser, a função potencial
acima realmente tende a zero no limite z → ∞. Verifique!
Se a carga for de natureza oposta à do disco, a força sobre ela será de
atração, e ela será acelerada no sentido negativo do eixo z. Ao passar por
z = 0 a força sobre ela será nula, mas ela terá adquirido uma velocidade
e seu movimento continua ao longo do eixo z negativo. Entretanto, o
campo nessa região se inverte, e a partícula será freada e puxada de volta,
e assim por diante. O movimento é oscilatório e periódico, mas não é um
movimento harmônico simples, pois a força não é em geral, proporcional à
distância da partícula à posição de equilíbrio.
Porém, se a partícula for solta de uma posição inicial z 0 << a, podemos
fazer as aproximações (lembre-se que, devido à conservação da energia, |z|
nunca será maior que a distância inicial z 0 )
p
Unifei
µ
¶−1/2 µ
¶
z2
1 z2
= 1+ 2
' 1−
,
b
2 b2
z2 + b2
b
Eduardo Resek
68
Capítulo 3 Potencial eletrostático
idem para o termo envolvendo a. Assim
· 2
¸
z
z2
3Qz
Q
−
' −ẑ
.
E ' ẑ
2
2
4π²0 az 2a
2(2a)
32π²0 a 3
A força sobre a carga fica
F ' −ẑ
3Q 2
z,
32π²0 a 3
que é proporcional à distância à posição de equilíbrio do movimento. A
denotando por k esta constante de proporcionalidade, sabemos que a solução da equação de movimento conduz a umapsolução harmônica (função
seno ou cosseno) com frequência angular ω = k/m. Portanto, pelo menos
nessa aproximação o movimento será harmônico simples, com frequência
angular
s
ω=
Q
4a
3
2π²0 am
3.3 O dipolo elétrico
3.3.1 Momento de dipolo elétrico
q
a
Um dipolo elétrico é definido, na sua forma mais simples, como um sistema que
compraz cargas elétricas pontuais iguais, porém de naturezas opostas. Digamos
que duas cargas pontuais, q e −q, encontrem-se separadas por uma distância a;
define-se como momento de dipolo elétrico desse sistema o vetor
p = q a â,
(3.9)
onde â é o vetor unitário que jaz sobre a reta que contem as cargas, sentido da
negativa para a positiva.
−q
Figura 3.3 Dipolo elétrico simples
3.3.2 Potencial e campo de um dipolo em pontos distantes
P
z
q
1
2a
r1
r
r2
O
− 12 a
−q
Figura 3.4 Dipolo elétrico na origem
Seja um dipolo de cargas ±q e a o vetor posição da carga positiva relativamente à
carga negativa. Para calcularmos o potencial em pontos muito distantes do dipolo
(distâncias >> a), adotemos a origem do sistema de coordenadas no centro do
dipolo, de modo que as posições das cargas positiva e negativa do dipolo sejam
indicadas pelos vetores 12 a e − 12 a, respectivamente, O potencial num ponto P
qualquer do espaço será
µ
¶
q
(−q)
q
1
1
V (r) =
+
=
−
4π²0 |r − a/2| 4π²0 |r + a/2| 4π²0 |r − a/2| |r + a/2|
Como r >> a, podemos expandir os termos entre parêntesis (binômio ou Ma-
Eduardo Resek
Unifei
3.3 O dipolo elétrico
69
cLaurin),
µ
¶−1/2
a·r a 2
1
2
2
−1/2
−1
= (r ± a·r + a /4)
=r
1± 2 + 2
.
|r ± a/2|
r
4r
Mantendo apenas os termos de primeira ordem em a/r , temos aproximadamente
1
1 1 a·r
,
≈ ∓
|r ± a/2| r 2 r 3
de modo que
V (r) =
q a·r
,
4π²0 r 3
V (r) =
1 p·r
.
4π²0 r 3
ou
O campo elétrico é obtido através do gradiente do potencial. Utilizando a identidade
∇(φψ) = φ∇ψ + ψ∇φ,
com
¡
¢
φ = p·r =⇒ ∇φ = ∇ p x x + p y y + p z z = p x x̂ + p y ŷ + p z ẑ = p
e
ψ=
1
∂ψ
3
r
= r −3 =⇒ ∇ψ =
r̂ = − 4 r̂ = −3 5
r3
∂r
r
r
resulta em
E(r) =
1 3(p·r)r − r 2 p
.
4π²0
r5
É claro que, para o caso geral de um dipolo fora da origem, basta trocar r por r −r0
nas equações acima, onde r0 é o vetor posição do centro do dipolo:
V (r) =
E(r) =
1 p·(r − r0 )
,
4π²0 |r − r0 |3
1 3[p·(r − r0 )]r − r0 − |r − r0 |2 p
.
4π²0
|r − r0 |5
(3.10)
(3.11)
3.3.3 Momento de dipolo elétrico de uma distribuição contínua de cargas
Para uma distribuição contínua de cargas, o momento de dipolo elétrico da
distribuição é definido como
Z
p = r0 d q,
onde d q pode ser expresso como
0
0
ρ(r ) d v , para uma distribuição volumétrica de cargas
σ(r0 ) d S 0 , para uma distribuição superficial de cargas
dq =
λ(r0 ) d `0 , para uma distribuição linear de cargas
Unifei
Eduardo Resek
70
Capítulo 3 Potencial eletrostático
Como sabemos, é possível expressar qualquer distribuição de cargas como uma
densidade volumétrica, de modo que a expressão mais geral seria
Z
p=
r0 ρ(r0 ) d v 0 .
v0
Para o dipolo de cargas pontuais, por exemplo,
ρ(r0 ) = qδ(r0 − r2 ) − qδ(r0 − r1 ),
de modo que
Z
p=q
0
v0
0
0
r δ(r − r2 ) d v − q
Z
v0
r0 δ(r0 − r1 ) d v 0 = q(r2 − r1 ) = qa,
ou seja, coincide com a definição anterior.
As expressões para potenciais e campos distantes do dipolo se mantêm inalteradas.
3.3.4 Dipolo num campo externo
O
r1
r2
q
F2
E
F1
−q
Figura 3.5 Dipolo elétrico num
campo externo uniforme
Se um dipolo formado por duas cargas pontuais for colocado num campo externo
uniforme, tal como indicado na figura, é claro que a força total sobre ele será nula,
haja vista que cada carga sofrerá forças de igual intensidade e direção, mas de
sentidos opostos. Isso não significa que o dipolo não irá interagir com o campo,
pois ele sofrerá um torque (também conhecido como conjugado ou momento
binário), dado por
τ = r2 ×F2 + r1 ×F2 = q(r2 − r1 )×E = qa×E =⇒ τ = p×E
Isso significa que o dipolo tende a girar sob a ação do campo externo, mesmo que
uniforme. A variação da energia potencial sofrida pelo sistema quando o dipolo
girar de um ângulo d θ será
dU = τ· d θ = p×E· d θ = pE sen θ d θ
Para uma rotação de um ângulo θi a um ângulo θ f , a correspondente variação da
energia potencial é
∆U = U f −Ui =
Z
θf
θi
pE sen θ d θ = −pE (cos θ f − pE cos θi ).
Podemos então escrever a energia potencial como
U = −pE cos θ,
ou U = −p·E
Se o dipolo for colocado num campo externo não uniforme, mas que varia
suavemente dentro da região ocupada pelo dipolo, ou de maneira equivalente, se
Eduardo Resek
Unifei
3.4 Energia potencial elétrica
71
a dimensão característica do dipolo for pequena comparada à ordem de grandeza
da variação do campo elétrico,
E(r2 ) = E(r1 ) + ∆E,
com ∆E pequeno em relação a E(r1 ), a força sobre o dipolo será
F = q[E(r2 ) − E(r1 )] = −q[∇V (r2 ) − ∇V (r1 )] = −q∇(V2 − V1 ) = −q∇(∆V12 ).
Por outro lado, como
ou ∆V ≈ ∇V ·∆r = −E·∆r,
dV = ∇V · d r,
O
r1
F ≈ q∇(E·∆r12 ) = q∇(E·a).
r2
q
F2
E
Assim,
F1
F = ∇(p·E),
e como F = −∇U ,
−q
Figura 3.6 Dipolo elétrico num
campo externo não uniforme
U = −p·E
3.4 Energia potencial elétrica
Nessa seção vamos determinar uma relação mais interessante entre a energia
potencial e o campo elétrico de uma distribuição de cargas. Como a energia
potencial de um sistema não depende da história pregressa dos componentes
desse sistema, mas somente do seu estado atual, podemos determinar essa energia potencial partindo de uma situação inicial hipotética onde todas as cargas
estão infinitamente afastadas entre si. Vamos então trazendo as cargas, uma a
uma, do infinito até a posição por elas de fato ocupada no sistema. A energia do
sistema será o trabalho total desenvolvido pelo agente externo para realizar essa
operação.
3.4.1 Sistema de cargas pontuais
Seja inicialmente uma carga q 1 na origem do sistema de coordenadas. Uma
segunda carga será trazida do infinito até o ponto r2 , situado a uma distância
final R 12 de q 1 O trabalho realizado por um agente externo para fazer isso será
Z r2
W =−
F21 · d r.
∞
Adotando o referencial na origem apenas para efetuar essa integração, temos
F21 =
e
Unifei
1 q1 q2
r̂,
4π²0 r 2
, d r = d r r̂ + r d θ θ̂ + r sen θ d ϕ ϕ̂ =⇒ F· d r =
q1 q2
W=
4π²0
Z
R 12
∞
1 q1 q2
d r,
4π²0 r 2
dr
q1 q2
=
= U12 ,
2
r
4π²0 R 12
Eduardo Resek
72
Capítulo 3 Potencial eletrostático
será a energia do par de cargas, q 1 e q 2 .
Para acrescentar uma terceira carga q 3 ao sistema, colocando-a no ponto r3 ,
o agente externo deverá agora desenvolver um trabalho contra as forças F31 e F32
que, respectivamente, as cargas q 1 e q 2 exercem sobre q 3 . O trabalho adicional
W3 requerido é
Z r3
Z r3
Z r3
W3 = −
(F31 + F32 )· d r =
F31 · d r −
F32 · d r.
∞
∞
∞
O cálculo de cada integral é idêntico ao já realizado, bastando trocar os nomes
das cargas envolvidas:
q1 q3
q2 q3
W3 =
+
.
4π²0 R 13 4π²0 R 23
A energia potencial total armazenada no sistema será portanto:
U=
q1 q3
q2 q3
q1 q2
+
+
.
4π²0 R 12 4π²0 R 13 4π²0 R 23
Esse resultado pode ser facilmente generalizado para um sistema de N cargas:
cada par de cargas (q i , q j ) contribui com um termo do tipo
qi q j
4π²0 R i j
.
A energia total é
U=
N X
N q q
N X
N q q
1 1 X
1 X
i j
i j
=
.
4π²0 i =1 j =i +1 R i j
2 4π²0 i =1 j =1 R i j
j 6=i
Por que o fator 1/2 na segunda igualdade? Ela foi obtida estendendo o somatório
em j para começar em j = 1. Com isso, todos os pares de cargas serão somados
duas vezes e, para compensar, dividimos o resultado geral por 2. A expressão
acima pode ser convenientemente reescrita como
U=
N
N
X
1X
1 qj
,
qi
2 i =1 j =1 4π²0 R i j
j 6=i
|
{z
V (ri )
}
pois
N
X
1 qj
j =1 4π²0 R i j
j 6=i
é justamente a soma dos potenciais de cada uma das demais cargas (exceto q i )
no ponto ri . Desse modo,
N
1X
U=
q i V (ri ).
(3.12)
2 i =1
Eduardo Resek
Unifei
3.4 Energia potencial elétrica
73
3.4.2 Distribuição contínua de cargas
Uma distribuição contínua de cargas pode ser dividida em um número N muito
grande de pequenos elementos de cargas, para as quais 3.12 nos permite escrever
U≈
N
1X
V (ri )∆q i .
2 i =1
No limite em que N → ∞ teremos
1
U=
2
Z
V (r0 ) d q.
Para uma distribuição volumétrica de cargas, fica
Z
1
ρ(r0 )V (r0 ) d v 0 .
U=
2 v0
(3.13)
É mais conveniente escrever a energia potencial em termos do campo elétrico.
Para isso, usando a lei de Gauss na forma diferencial,
∇·E =
ρ
,
²0
eliminamos a densidade volumétrica de cargas da relação anterior:
Z
1
U = ²0 V ∇·E d v 0 .
2
v0
Por outro lado, fazendo ψ = V e A = E na identidade vetorial
∇·(ψA) = ∇ψ·A + ψ∇·A,
obtemos
∇·(V E) = V ∇·E + ∇V ·E =⇒ V ∇·E = ∇·(V E) + E 2 ,
pois −∇V = E. Substituindo acima, resulta
µZ
¶
Z
1
0
2
0
U = ²0
∇·(V E) d v + E d v .
2
v0
v0
O teorema do divergente de Gauss nos habilita a escrever a primeira integral
de volume como o fluxo através da superfície que delimita o volume v 0 . Antes,
observemos que o volume de integração acima pode ser qualquer volume v que
pelo menos contenha o da distribuição, pois fora dela, ρ = 0 e a contribuição do
volume externo a v 0 é nula. Vamos escolher o volume v 00 delimitado por uma
superfície esférica S 00 , com centro em algum lugar dentro da distribuição de
cargas, e de raio R suficientemente grande para abranger toda ela:
µI
¶
Z
1
0
2
0
U = ²0
V E· n̂d S +
E dv .
2
S 00
v 00
Unifei
Eduardo Resek
74
Capítulo 3 Potencial eletrostático
Para valores de R muito maiores que a maior dimensão da distribuição, o potencial e o campo dessa distribuição se aproximam assintoticamente dos de uma
carga pontual igual à carga total da primeira, ou seja
|E| ∼
1
,
R2
V∼
1
1
=⇒ |V E| ∼ 3 .
R
R
Por outro lado, o elemento de superfície da integral de fluxo varia proporcionalmente a R 2 . O conjunto varia com R −1 , de modo que, no limite em que R → ∞:
I
lim
V E· n̂ d S 0 → 0.
R→∞ S 00
A energia total, nesse limite, se torna
1
U = ²0
2
Z
E 2 d v 0.
(3.14)
Todo o
espaço
Essa relação mostra que a energia potencial pode ser considerada como armazenada no campo elétrico. Podemos definir a densidade de energia potencial
elétrica como
dU 1
uE =
= ²0 E 2 ,
(3.15)
dv
2
que é uma função de ponto relacionada à quantidade de energia potencial
armazenada num elemento de volume ao redor de cada ponto no espaço.
Exemplo 3.3 Determine a energia armazenada no campo de uma esfera
de raio R e carga Q distribuída uniformemente sobre seu volume.
Solução:
Podemos calcular essa energia usando a expressão 3.13 ou através de 3.14.
De uma forma ou de outra vamos precisar dos campos elétricos dentro e
fora da esfera, facilmente obtidos através da lei de Gauss, haja vista que este
goza de simetria esférica, E = E (r ) r̂. Utilizando uma superfície gaussiana
de raio r < R, lembrando que a densidade volumétrica de cargas é uniforme,
ρ = Q/(4πR 3 /3),
4πr 2 E (r ) =
1 4 3 1 r3
Qr
ρ πr = Q 3 =⇒ Eint =
r̂,
²0 3
²0 R
4π²0 R 3
r < R.
Para r > R, a carga elétrica envolvida pela gaussiana é a carga total da esfera,
de modo que
Q
Eext =
r̂, r > R.
4π²0 r 2
O potencial eletrostático num ponto interno à esfera, adotando o referencial nulo no infinito, é dado por 3.6:
Z r
V (r ) = −
E(r0 )· d r0 .
∞
Eduardo Resek
Unifei
3.4 Energia potencial elétrica
75
Em coordenadas esféricas,
d r = d r r̂ + r d θ θ̂ + r sen θ d ϕ ϕ̂ =⇒ E· d r = E d r.
Aqui, embora estejamos realizando o percurso de integração a partir do
infinito em direção a um ponto próximo à origem do sistema, não escrevemos d r = −d r r̂ + · · · , pois preferimos expressar esse fato nos limites de
integração. Assim
Z
V (r ) = −
R
∞
0
Z
0
E ext (r ) d r −
r
R
Q
E int (r ) d r =
4π²0
0
resultando em
V (r ) =
0
µZ
∞
R
dr
+
r2
R
Z
r
¶
r0
dr ,
R3
Q(3R 2 − r 2 )
.
4π²0 R 3
Com isso, o cálculo da energia como em 3.13 é direto:
U=
1
2
2π Z π Z R
Z
0
0
0
3Q Q(3R 2 − r 2 ) 2
r sen θ d r d θ d ϕ,
4πR 3 4π²0 R 3
ou
U=
3Q 2
20π²0 R
A alternativa através de 3.14 também é trivial:
2π Z π Z R µ
¶2
Qr
r 2 sen θ d r d θ d ϕ
3
4π²
R
0
0
0
0
¶2
¸
Z 2π Z π Z ∞ µ
Q
2
r
sen
θ
d
r
d
θ
d
ϕ
,
+
4π²0 r 2
0
0
R
1
U = ²0
2
·Z
que obviamente também conduz a
U=
3Q 2
20π²0 R
Questões sobre o Capítulo 3: Potencial eletrostático
Q3.1
Explique a diferença entre potencial elétrico e energia potencial eletrostática.
Q3.2
Uma carga positiva é liberada, em repouso, num campo elétrico. A
carga se desloca para a região de potencial elétrico mais alto ou mais
baixo?
Q3.3
Se o potencial elétrico for constante numa região do espaço, o que se
pode dizer sobre o campo elétrico nessa região?
Unifei
Eduardo Resek
76
Capítulo 3 Potencial eletrostático
Q3.4
Se E for conhecido num único ponto, é possível determinar V nesse
ponto? E o oposto: se conhecermos V num único ponto, podemos
determinar E?
Q3.5
Defina superfície equipotencial.
Q3.6
O vetor campo eletrostático é sempre normal à superfície equipotencial, isto é, linhas de campo e superfícies equipotenciais são sempre
perpendiculares, e, portanto duas superfícies equipotenciais nunca
podem se cruzar. Além disso, E aponta no sentido de potenciais decrescentes. Explique por que.
Q3.7
Considerando um condutor maciço e de formato irregular, qual deve
ser a relação entre o valor do potencial elétrico em pontos do seu interior e em pontos da sua superfície? Responda novamente considerando
condutores com cavidades em seu interior, e também condutores formados por uma casca metálica muito fina, todos de formato arbitrário.
Q3.8
Considere duas esferas condutoras de raios R 1 e R 2 com cargas Q 1 e
Q 2 respectivamente que se encontram muito distantes uma da outra.
Conecte-as agora por fio condutor e encontre a relação entre suas
densidades superficiais de cargas, analise o resultado obtido e dê a sua
explicação para o fenômeno do poder das pontas em condutores.
Q3.9
Os conselhos que se dão a alpinistas surpreendidos por tempestades
acompanhadas de descargas elétricas são: a) abandonar rapidamente
os picos; b) juntar ambos os pés e agachar-se num descampado, com
apenas os pés tocando o solo; c) evitar permanecer nas proximidades
de árvores, principalmente se forem altas. Discuta quais são as bases
para esses conselhos.
Problemas do Capítulo 3: Potencial eletrostático
P3.1
Determine o potencial e o campo eletrostáticos num ponto qualquer
do eixo de simetria de:
a) um anel de raio a uniformemente carregado com densidade linear
de carga λ;
b) um disco de raio a uniformemente carregado com densidade superficial de carga σ;
Resp: a) V (z) =
λa
2²0 (z 2 +a 2 )1/2
~ (z) = σ [1 − p z
E
2²
0
P3.2
Eduardo Resek
z 2 +a 2
,
~ (z) =
E
λaz
ẑ
2²0 (z 2 +a 2 )3/2
b) z > 0: V (z) = 2²σ [
0
p
z 2 + a 2 − |z|],
]ẑ.
Um disco de raio R tem uma densidade de carga +σ0 para r < a e uma
densidade de carga igual e oposta −σ0 para a < r < R. A carga total do
disco é nula.
a) Determinar o potencial à distância x sobre o eixo do disco.
Unifei
3.4 Energia potencial elétrica
77
b) Dar a expressão aproximada de V (x) quando x for muito maior do
que R.
Resp: a) V (x) = (σ0 /2²0 )(2
P3.3
x 2 + R 2 /2 − x −
p
x 2 + R 2 ), b) σ0 R 4 /32²0 x 3
Um bastão de vidro de comprimento L uniformemente carregado
com densidade linear de carga λ jaz sobre a parte positiva do eixo
x de um sistema de coordenadas, sendo que uma das extremidades
está na origem. Determine num ponto P (x, 0, 0), x > L, o potencial
eletrostático V (escolhido como sendo igual a zero no infinito) e o
campo eletrostático.
Resp: V (x) =
P3.4
p
λ
x
L
λ
ln
x̂, para z > L
, E(x) =
4π²0
x −L
4π²0 x(x − L)
Sejam dois planos carregados, infinitos e paralelos, um deles no plano
yz e o outro à distância x = a. a) Determinar o potencial eletrostático
no espaço entre eles, com V = 0 em x = 0 e cada plano com densidades
de carga iguais e positivas +σ. b) Repetir o problema se as densidades
de carga forem iguais porém de sinais contrários e a carga positiva
estiver no plano yz. c) Faça um gráfico do potencial V em função de
x e do campo elétrico E em função de x, abrangendo regiões entre as
placas e fora delas.
Resp: a) V = 0 para 0 < x < a, −(σ/²0 )(x − a) para x > a e σx/²0 para x < 0; b) −σx/²0 para
0 < x < a, −σa/²0 para x > a e 0 para x < a
P3.5
Uma casca hemisférica de raio a encontra-se uniformemente carregada com carga Q/2.
a) Integrando sobre a configuração de cargas, determine o potencial eletrostático no ponto central (centro de curvatura).
Resp: a)
V (0) =
Q
8π²0 a
b) Uma partícula de massa m e carga Q é lançada do infinito e viaja
sobre a reta suporte do campo eletrostático no ponto central. Determine a velocidade inicial mínima da partícula, para que esta alcance o
Q
ponto central.
Resp: v 0 = p
2 π²0 ma
P3.6
a) Determine o potencial eletrostático produzido por uma casca esférica de raio a, uniformemente carregada com carga Q e esboce seu
gráfico em função de r . b) Usando o resultado do item a), integre
sobre a configuração de cargas para determinar a energia potencial
eletrostática associada. Obtenha este mesmo resultado usando agora
o conhecimento do campo E. c) Considerando a resposta no item
c) , diga se seria possível formar a casca carregada usando a energia
potencial eletrostática de uma configuração de duas pontuais, com
carga Q cada, sendo a a distância entre as cargas pontuais (justifique).
Resp: a) V (r ) =
Q2
U =
4π²0 a
Q
Q
, para r > a, V (r ) =
, para r < a;
4π²0 r
4π²0 a
b) U =
Q2
8π²0 a
c) Sim, pois
0
Unifei
Eduardo Resek
78
Capítulo 3 Potencial eletrostático
y
P3.7
Três cargas idênticas de 0,005 C são colocadas nos vértices de um triângulo equilátero de 1,0 m de lado.
a) Qual o trabalho necessário para se deslocar uma das cargas para o
ponto situado no meio do segmento de reta que une as outras duas
cargas? Resp: W = 4,5.105 J
b) Determine o fluxo elétrico através de uma esfera de raio 0,75 m, centrada na carga inferior esquerda da figura, nas configurações inicial e
final. Resp: ΦE i = 5,6.108 V.m, ΦE f = 1,12.109 V.m
P3.8
Considere 3 partículas idênticas, cada uma com carga Q e massa m,
inicialmente distribuídas na forma de um triângulo equilátero como
mostrado na figura ao lado. a) Calcule o trabalho realizado ao se mover
a carga localizada no ponto P 1 para o ponto P 2 . b) Se a mesma carga
for abandonada em repouso no ponto P 1 , qual será sua velocidade
final quando estiver muito afastada da distribuição de cargas?
P3.9
Em uma certa região do espaço o potencial é dado por V = ax y +b y 2 +
c y.
a) Determinar E. Em que pontos ele se anula?
b) Determinar, na origem, a densidade volumétrica de cargas que
produz este potencial e campo.
Figura 3.7 Problema 3.7
a
a
a
a
x
Figura 3.8 Problema 3.8
Resp: a) E = −a y x̂ − (ax + 2b y + c) ŷ. O campo se anula em y = 0 e x = −c/a
P3.10
b) ρ = −2b²0
Em uma certa região do espaço existe uma distribuição esférica de
cargas cujo potencial é dado por:
2
r2
r3
ρ0 a
(1 − 3 2 + 2 3 ), para r ≤ a
V (r ) =
a
a
18²0
0,
para r > a
~ para r ≤ a e r > a;
a) Calcular E
b) determine a densidade de carga ρ dessa distribuição;
c) determine a carga total dessa distribuição.
ρ0 r
(1 − r /a) r̂, r < a
3²0
respostas dos itens a) e b) se anulam.
Resp: a) E =
P3.11
µ
¶
4a
b) ρ(r ) = ρ 0 1 −
,
3r
c) Q = 0. Para r > a as
Um dipolo elétrico pontual de momento de dipolo p encontra-se a uma
distância a de um fio retilíneo infinito de densidade linear de cargas λ
uniforme. Inicialmente a orientação do dipolo é perpendicular ao fio
no sentido radial positivo.
a) Quais são a força e o torque que atuam sobre ele?
b) Que trabalho será necessário para girá-lo até que sua orientação
pλ
pλ
fique paralela ao fio? Resp: a) τ = 0, F = −
ρ̂ b)W =
2
2π²0 a
Eduardo Resek
r <a
2π²0 a
Unifei
3.4 Energia potencial elétrica
79
P3.12
Considere um plano infinito carregado com densidade superficial uniforme de cargas σ localizado no plano x y (z = 0). Se um dipolo elétrico
de módulo p está no plano y z e faz inicialmente um ângulo de π3 com
relação ao eixo z, calcule: a) A força resultante exercida sobre o dipolo;
b) O vetor torque sobre o dipolo e c) a energia necessária para girar o
dipolo até um ângulo de π2 em relação a z.
P3.13
Numa região do espaço onde o potencial é dado por V (x) = 21 ax 2 +
bx + c, onde a, b e c são constantes, é colocado um pequeno dipolo
elétrico de momento p = p 0 x̂. Determine a força e o torque atuantes sobre ele. Que energia foi dispendida para colocá-lo lá? Resp:
τ = 0,
P3.14
F = p 0 a,
U = p 0 (ax + b)
A figura ao lado ilustra um sistema de duas cargas q 1 = −q 2 = q. Pedese
q
q
a) O potencial eletrostático em A e B ; Resp: V A =
VB = −
b) A energia eletrostática desse sistema.
8π²0 a
p
Resp: U = − 5
q2
20π²0 a
8π²0 a
c) O trabalho que um agente externo deve realizar para levar uma carga
q 3 = 2q desde A até B .
P3.15
q2
2π²0 a
a
A
2a
Figura 3.9 Problema 3.14
Quatro cargas −q, 3q, −3q e q são dispostas sequencial e linearmente
ao longo do eixo z de um sistema de coordenadas, sendo a a distância
entre cada carga e sua vizinha mais próxima. Considere a origem do
sistema no ponto médio entre as cargas ±3q. Determine o potencial
elétrico num ponto qualquer do espaço muito distante da distribuição,
r >> a. Resp:
P3.16
Resp: Wext (A→B ) = −
B
V=
3q a 3 (5 cos3 θ − 3 cos θ)
4π²0 r 4
Uma carga puntiforme q é colocada numa caixa cúbica de aresta l .
Calcule o fluxo do campo elétrico sobre cada uma das faces a) se a
carga ocupa o centro do cubo; b) se é colocada num dos vértices.
Resp: a) q/6²0 ; b) 0 para as faces adjacentes e q/24²0 para as faces opostas.
P3.17
Uma esfera metálica oca de raios interno e externo respectivamente
iguais a a e b possui um excesso de carga igual a +q, sendo q > 0.
Exatamente no centro da esfera é colocada uma carga puntiforme −2q.
Determine:
a) As densidades de carga nas superfícies interna e externa da esfera.
b) O trabalho necessário para se transportar uma carga 3q do ponto A
ao ponto B , através da trajetória mostrada na figura.
a +b
c) O vetor campo elétrico nos pontos r = a, r =
, e r = 2b.
2
q
q
Resp: a) σint =
, σext = −
b) W A→B = 0
2πa 2
4πb 2
q
q
a +b
c) E(a) = −
) = 0, E(2b) = −
r̂, E(
r̂
2
2π²0 a 2
16π²0 b 2
Unifei
−2q
A
B
Figura 3.10 Problema 3.17
Eduardo Resek
80
Capítulo 3 Potencial eletrostático
P3.18
No modelo clássico de J.J. Thomson para o átomo de hidrogênio, a
carga +e do núcleo era imaginada como estando uniformemente distribuída no interior de uma esfera de raio a da ordem de 10−8 cm
(raio atômico) e o elétron era tratado como uma carga puntiforme −e
movendo-se no interior dessa distribuição. a) Calcule o campo elétrico
que atuaria sobre o elétron num ponto a uma distância r < a do centro
da esfera; b) mostre que o elétron poderia mover-se radialmente com
um movimento harmônico simples; c) calcule a frequência de oscilação e compare-a com uma frequência típica da luz visível.
ρr
3 1/2 ; c) ν ≈ 7, 2 × 1015 Hz
~=
Resp: a)E
3²0 rˆ; b) ω = e/(4π²0 m e a )
P3.19
Um cilindro oco de raios interno e externo respectivamente iguais
a a e b está carregado com uma densidade volumétrica de cargas
ρ v = A/ρ. Determine o campo elétrico em todas as regiões do espaço
e a diferença de potencial entre as superfícies interna e externa do
A
A
(ρ − a)ρ̂, para a < ρ < b; E =
(b − a)ρ̂, para
cilindro. Resp: E = 0, para 0 < ρ < a; E =
A
ρ > b. V (a) − V (b) = (b − a − a ln(b/a)).
²0
Eduardo Resek
²0 ρ
²0 ρ
Unifei
Capítulo 4
Soluções de problemas em
eletrostática
Objetivos
Ao final desse capítulo, você deverá ser capaz de:
a) Identificar que tipo de situação não pode ser resolvida através do cáclculo
direto dos campos ou potenciais.
b) Enumerar e explorar as propriedades da equação de Laplace, explicando como
elas podem ser utilizadas para construir a solução final de um problema de
valores no contorno.
c) Identificar os tipos de condições de contorno e como utilizá-las para resolver
a equação de Laplace.
d) Utilizar o método das imagens para resolver problemas envolvendo consutores.
e) Escrever a solução geral da equação de Laplace em duas e três dimensões em
coordenadas cartesianas, cilíndricas e esféricas
f ) Resolver completamente a equação de Laplace nas situações acima, aplicando
as condições de contorno à solução geral.
g) Utilizar o método da função de Green para resolver problemas de contorno.
h) Determinar a função de Green que se aplica a uma dada situação por vários
métodos.
4.1 Equações de Poisson e Laplace
É muito simples obter as equações de Poisson e Laplace. Como E = −∇V , da Lei
de Gauss temos
ρ
∇2V = − ,
(4.1)
²0
que é a equação de Poisson. Nas regiões onde não há cargas, temos e equação de
Laplace,
∇2V = 0,
(4.2)
81
82
Capítulo 4 Soluções de problemas em eletrostática
Estas equações aparecem em várias outras áreas da Física, e existe um grande número de técnicas de solução diferentes, cada qual mais adequada a certa situação
específica. No estudo destas técnicas, dois teoremas se fazem importantes, um
deles óbvio mas necessário, e o outro não tão trivial. Antes de os enunciarmos, entretanto, vejamos uma definição acerca das condições de contorno normalmente
encontradas nos problemas tipicamente endereçados via equação de Poisson ou
Laplace.
Definição 1 (Condições de Contorno de Dirichlet). Quando o valor da função
(ou seja, do potencial) é especificado em uma ou mais superfícies fechadas no
espaço.
Definição 2 (Condições de Contorno de Neumann). Quando o valor da derivada
normal da função (ou seja, do gradiente, o que essencialmente equivale ao campo
elétrico ou à densidade superficial de cargas) é especificado em uma ou mais
superfícies fechadas no espaço.
Teorema 1 (Linearidade). Se V1 , V2 , . . . , Vn são soluções da equação de Laplace,
então
V = α1V1 + α2V2 + · · · + αn Vn ,
onde os α são constantes, também o será.
A prova é trivial e será deixada como exercício.
Exercício proposto 2. Demonstre a proposição acima!
Teorema 2 (Unicidade). Duas soluções da equação de Poisson que satisfaçam às
mesmas condições de contorno (tipo Dirichlet ou Neumann), diferem no máximo
por uma constante.
Suponha que uma determinada região do espaço de volume v 0 seja delimitada por uma superície S 0 (que pode ser infinita). Dentro desta região existem n
corpos condutores de superfícies S 1 , S 2 , . . . , S n , eletricamente carregados e mantidos a determinados potenciais. Admitamos que, em v 0 , existam duas soluções
para a equação de Poisson, V1 e V2 :
∇2V1 = −
ρ
,
²0
∇2V2 = −
ρ
,
²0
ambas satisfazendo às mesmas condições de contorno em S 1 , S 2 , . . . , S n . Seja
V = V1 − V2 . É claro que
∇2V = 0,
além do que, nas superfícies especificadas, V = 0. Apliquemos o teorema da
divergência ao vetor V ∇V :
Z
I
∇·(V ∇V ) d v = V ∇V ·n̂ d S.
v0
Eduardo Resek
S
Unifei
4.2 Equações de Poisson e Laplace em uma dimensão
83
Por outro lado, como ∇·(V A) = V ∇·A + A·∇V , decorre que
∇·(V ∇V ) = V ∇2V + |∇V |2 = |∇V |2 ,
consequentemente,
I
Z
S
V ∇V ·n̂ d S =
v0
|∇V |2 d v,
onde S consiste de S 0 e de S 1 , S 2 , . . . , S n . Nessas últimas, V = 0. Para integrar na
superfície S 0 , extensa, que engloba todo o sistema, podemos imaginar uma esfera
de raio R muito grande, contendo S 0 . No integrando, a grandes distâncias V cai
com 1/R, ∇V cai com 1/R 2 e d S cresce com R 2 , de modo que no geral a integral
cai com 1/R e portanto tende a zero quando R → ∞. Isso implica então que
Z
|∇V |2 d v = 0.
v0
Ora, como o integrando é sempre não negativo, a integral só pode ser nula se
∇V = 0
em todos os pontos de v 0 , o que prova a unicidade das soluções (se ∇(V1 − V2 ) =
0 =⇒ V1 − V2 = cte. Como em S 1 , etc., V1 = V2 , isso vale para todos os demais
pontos).
É fácil ver que a mesma conclusão pode ser alcançada se admitirmos condições de contorno do tipo Neumann.
4.2 Equações de Poisson e Laplace em uma dimensão
Analisemos rapidamente os casos especiais em que o potencial é função apenas
de uma das coordenadas do sistema.
Coordenadas cartesianas Admitindo V = V (z) e ρ = ρ(z) (por que??), teremos
¸
Z ·Z z 0
d 2V
ρ
1 z
00
00
=−
=⇒
V (z) = −
ρ(z ) d z d z 0 + A 1 z + A 2 ,
d z2
²0
²0
onde A 1 e A 2 são constantes de integração. Note que se não há cargas (Laplace),
a solução é bem simples:
V (z) = A 1 z + A 2
Coordenadas cilíndricas Se ρ v = ρ v (ρ) e V = V (ρ),
µ
¶
¸
Z ρ · Z ρ0
dV
ρv
1
1
1 d
00 00
00
ρ
=−
=⇒ V (ρ) = −
ρ v (ρ )ρ d ρ d ρ 0 +A 1 ln ρ+A 2
ρ dρ
dρ
²0
²0 ρ
ρ 00
Para ρ v = 0 temos
µ
¶
1 d
dV
ρ
ρ
=−
=⇒ V (ρ) = A 1 ln ρ + A 2
ρ dρ
dρ
²0
Unifei
Eduardo Resek
84
Capítulo 4 Soluções de problemas em eletrostática
Coordenadas esféricas Se ρ = ρ(r )e V = V (r ),
µ
¶
Z r·
Z
ρ
1
1 d
1
2 dV
r
=−
=⇒ V (r ) = −
r 2 dr
dr
²0
²0 r 2
r 02
Novamente, para ρ = 0, fica
V (r ) =
r0
ρ(r 0 0 )r 0 02 d r 0 0
¸
dr 0 +
A1
+ A2.
r2
A1
+ A2.
r2
Exercício proposto 3. Determine para cada caso acima, o campo elétrico e a
densidade superficial de cargas em uma (ou mais) superfícies onde possam ser
fornecidas condições de contorno adequadas para a completa determinação do
potencial.
4.3 O método das imagens
O teorema da unicidade das soluções das equações de Laplace ou Poisson permitenos chegar a soluções da equação por qualquer método e, se as condições de
contorno forem satisfeitas, podemos garantir que ela é única. Muitas vezes a
solução direta por métodos matemáticos tradicionais é difícil mas, por mera
inspeção ou até mesmo adivinhação/tentativa, podemos chegar a uma solução
completa do problema. O método das imagens permite-nos, em certa classe
de problemas, chegar a soluções sem efetivamente ter que resolver as equações
diferenciais. Consiste basicamente em substituir as condições de contorno por
carga imagens que as reproduzam. Estas cargas imagens não existem na realidade
(virtuais). Elas aparecem geralmente numa região fora da validade da solução
a ser encontrada (por exemplo, dentro de um condutor em cuja superfície foi
especificado o potencial).
q
Exemplo 4.1 Carga pontual próxima a campo infinito - Considere um plano
condutor infinito aterrado (potencial zero), próximo ao qual (distância d )
se encontra um carga pontual q. Adotemos o sistema de coordenadas de
tal forma que o plano carregado coincida com o plano x y e a carga esteja
sobre o eixo z. Ao invés de resolvermos a equação de Laplace,
∇2V =
∂2V ∂2V ∂2V
+
+ 2 = 0,
∂x 2 ∂y 2
∂z
válida exceto no ponto ocupado pela carga, tentaremos determinar uma
configuração equivalente que satisfaça as seguintes condições:
Figura 4.1 Carga próxima a um
plano condutor infinito aterrado
• V (x, y, 0) = 0, isto é, o potencial é nulo em todos os pontos do plano
condutor.
• Em pontos muito próximos à carga, o potencial se aproxima daquele
de uma carga pontual.
Eduardo Resek
Unifei
4.4 O Método da Separação de Variáveis
85
• Em pontos muito distantes da carga (x → ±∞, y → ±∞, z → ∞), o
potencial se aproxima de zero.
q
• A função potencial é impar com respeito às coordenadas x e y, isto é
V (−x, y, z) = V (x, y, z),
V (x, −y, z) = V (x, y, z)
É fácil perceber que a seguinte situação produz uma função potencial
com as características desejadas: uma carga igual e oposta a q, colocada
simetricamente com relação ao plano condutor na região z < 0. O potencial,
então, pode ser escrito como
#
"
q
1
1
,
V (x, y, z) =
−p
p
4π²0
x 2 + y 2 + (z − d )2
x 2 + y 2 + (z + d )2
−q
Figura 4.2 Carga imagem
válida apenas para a região z > 0. A partir desse resultado, podemos detrminar a densidade superficial de cargas induzida no plano condutor:
σ(x, y) = ²0 E z |z=0 = −
qd
2π(x 2 + y 2 + d 2 )3/2
Exercício proposto 4. Determine a força de atração exercida sobre a carga q por
um plano infinito carregado dessa forma. Surpreso com o resultado?
Exemplo 4.2 Carga pontual próxima a uma esfera condutora aterrada Consideremos uma esfera de raio a, condutora e mantido a um potencial
fixo e originalmente neutra. A uma distância d de seu centro é colocada
uma carga pontual q. Determine a distribuição de cargas induzida na
esfera.
4.4 O Método da Separação de Variáveis
Consiste em escrever tentativamente s solução como o produto de funções de
cada uma das coordenadas das quais o potencial dependa, utilizando o princípio
da superposição caso haja multiplicidade de soluções linearmente independentes.
4.4.1 Separação de Variáveis em Coordenadas Cartesianas em Duas
Dimensões
Tomemos como exemplo a seguinte situação: as paredes condutoras x = 0 e x = a
estão aterradas, enquanto que a base y = 0, 0 < x < a encontra-se a um potencial
Unifei
Eduardo Resek
86
Capítulo 4 Soluções de problemas em eletrostática
V0 . Desejamos determinar as dsitribuições de potencial e campo elétricos no interior da região definida por 0 < x < a, y > 0. Nessa região não há cargas, de modo
∂2V ∂2V
que o potencial deve obedecer à equação de Laplace, ∇2V =
+
= 0;
∂x 2 ∂y 2
Como V = V (x, y), tentamos uma solução do tipo
y
V (x, y) = X (x)Y (y)
Substituindo na equação de Laplace, temos
V =0
V =0
Y (y)
d 2Y
d2X
+
X
(x)
= 0.
d x2
d y2
Dividindo por V = X Y , vem
O
V = V0
a
x
Figura 4.3 Poço infinito de potencial
1
1
X 00 (x) +
Y 00 (y) = 0,
X (x)
Y (y)
ou
1
1
X 00 (x) = −
Y 00 (y),
X (x)
Y (y)
o que somente é possível se ambos forem iguais a uma constante, ou seja, independente de x ou y. Seja k ∈ N esta constante. Separamos a equação original em
duas:
1
X 00 (x) = k
=⇒
X 00 (x) − k X (x) = 0,
X (x)
1
Y 00 (y) = −k
=⇒
Y 00 (x) + kY (y) = 0.
Y (y)
Se k 6= 0, as soluções serão do tipo
X (x) = A e
p
kx
p
kx
+ B e−
Y (y) = C e
,
p
−k y
p
−k y
+ D e−
,
ou seja, se k > 0, teremos exponenciais reais em x e exponenciais imaginárias
(funções harmônicas) em y, o contrário se k < 0. Se k = 0, as soluções serão
ambas lineares na respectiva variável.
A solução deve ainda satisfazer às condições de contorno
(i ) V (0, y) = 0,
(i i i ) V (x, 0) = V0 ,
em 0 < x < a,
(i i ) V (a, y) = 0,
(i v)
lim V (x, y) < ∞ para 0 < x < a.
y→∞
Vemos que a primeira e a terceira hipóteses devem ser excluídas, pois não há
possibilidade de encontrar uma solução não trivial nessas condições. Como k
deve ser negativo, escrevâmo-lo como k = −λ2 , λ ∈ N:
X (x) = A 0 cos λx + B 0 sen λx,
Y (y) = C eλy + D e−λy ,
onde também reescrevemos as exponenciais complexas em termos de funções
trigonométricas. A condição (i ) nos diz que X (0) = 0, portanto A 0 = 0. A condição
(i i ) exige que X (a) = 0, ou seja,
B 0 sen λa = 0
Eduardo Resek
=⇒
sen λa = 0
ou
λa = nπ,
n ∈ N,
Unifei
4.4 O Método da Separação de Variáveis
87
pois se B 0 = 0, X seria identicamente nula. Surge então a possibilidade de múltiplas soluções linearmente independentes, uma para cada valor possível de n.
Vamos caracterizar cada uma dessas soluções pelo índice n. A constante B 0 pode
ser absorvida nas constantes C e D, de modo que escreveremos
¢
nπx ¡
C n enπy/a + D n e−nπy/a ,
a
Vn (x, y) = sen
n = 1, 2, 3, . . .
A condição (i v) impõe C n = 0, do contrário Vn não seria finito para y → ∞. Cada
possível solução fica então reduzida à forma
Vn (x, y) = D n sen
nπx −nπy/a
e
.
a
Nesse ponto é conveniente escrever a solução completa de V (x, y), contemplando
todos os possíveis valores de n. Ela é simplesmente a combinação linear dos Vn :
V (x, y) =
∞
X
D n sen
n=1
nπx −nπy/a
e
.
a
De acordo com (i i i ), devemos ter
∞
X
D n sen
n=1
nπx
= V0 ,
a
0 < x < a.
Isso sugere uma série trigonométrica de Fourier. Nossa solução deve ser válida
apenas na região 0 < x < a. É lícito, portanto, imaginar uma função f (x) que,
periódica, reproduza o valor do potencial na região citada, e que seja passível de
representação em série de Fourier de senos. Como o seno é uma função ímpar,
imaginamos uma extensão periódica ímpar:
f (x) =
(
−V0 , −a < x < 0,
V0 ,
0<x <a
e f (x + 2a) = f (x)
f (x)
V0
−3a
−2a
a
a
0
2a
3a
x
−V0
Figura 4.4 Extensão periódica da função f (x)
Unifei
Eduardo Resek
88
Capítulo 4 Soluções de problemas em eletrostática
A função f (x) possui período 2a, portanto sua expansão em série de senos
teria a forma
∞
X
nπx
f (x) =
b n sen
,
a
n=1
com
1
bn =
a
Z
a
−a
nπx
2
f (x) sen
dx =
a
a
a
Z
0
( 4V
0
¤
, para n ímpar
nπx
2V0 £
V0 sen
dx =
1 − (−1)n = nπ
,
a
nπ
0,
para n par
ou seja,
f (x) =
∞ sen[(2n − 1)πx/a]
4V0 X
.
π n=1
2n − 1
Como vimos, f (x) → V0 em 0 < x < a, sendo portanto a solução procurada,
D n = b n . A solução completa fica
V (x, y) =
∞ sen[(2n − 1)πx/a]
4V0 X
e−(2n−1)πy/a .
π n=1
2n − 1
O campo pode ser imediatamente calculado a partir de
E = −∇V = −
∞ ©
ª
∂V
∂V
4V0 X
x̂−
ŷ =
−x̂ cos[(2n − 1)πx/a] + ŷ sen[(2n − 1)πx/a] e−(2n−1)πy/a .
∂x
∂y
a n=1
As densidades de cargas nas superfícies condutoras internas à região serão
σ = ²0 E·n̂,
onde n̂ é o versor perpendicular à superfície correspondente. Fica
σ(0, y) = ²0 x̂·E(0, y) = −
∞
4²0V0 X
4²0V0
2²0V0
¢=
e−(2n−1)πy/a = − ¡ −πy/a
.
πy/a
a n=1
a senh πy/a
a e
−e
As demais densidades serão
σ(a, y) = ²0 E(a, y)·(−x̂),
σ(x, 0) = ²0 ŷ·E(x, 0).
Fica como exercício proposto completar o cálculo dessas densidades de cargas.
Ainda pertinente a esse exemplo, nesse caso específico (e em alguns outros,
utilizando uma técnica semelhante), é possível expressar a solução obtida numa
forma fechada, ou seja, é possível somar explicitamente essa série de Fourier.
Vejamos:
Obtivemos
n nπx o
∞
∞
X
X
1 −nπy/a
nπx
1 −nπy/a
V (x, y) =cte
e
sen
= cte
e
Im ei a
n
a
n
n=1
n=1
n impar
=cte Im
n impar
X
∞
n=1
n impar
Eduardo Resek
X
∞
1 i nπ(x+i y)/a
e
= cte Im
n
n=1
n impar
n
Z
n
Unifei
4.4 O Método da Separação de Variáveis
onde
89
Z = ei π(x+i y)/a .
Partindo de
∞
X
Zn = 1+ Z + Z2 + Z3 + Z4 +··· =
n=0
1
,
1− Z
|Z | < 1,
multiplicando por d Z e integrando, teremos
∞ Zn
X
Z2 Z3 Z4
=Z+
+
+
= · · · = − ln(1 − Z ),
2
3
4
n=1 n
e trocando Z por −Z ,
−
∞ (−Z )n
X
Z2 Z3 Z4
=Z−
+
−
= · · · = ln(1 + Z ).
n
2
3
4
n=1
Somando essas duas últimas e dividindo por dois,
Z+
∞
X
Z3 Z5
+
+··· =
3
5
n=1
n impar
Zn 1 1+ Z
= ln
.
n
2 1− Z
Lembrando que o resultado é um número complexo e que na verdade desejamos
apenas a sua parte imaginária, recordemos que, sendo ζ um complexo na forma
ζ = x + i y = ρ ei θ ,
a parte imaginária de seu logaritmo natural será
ln ζ = ln ρ + i θ
Im {ln ζ} = θ = tan−1
=⇒
Para
Im {ζ}
Re {ζ}
2i Im{Z }
z }| {
1 + Z (1 + Z )(1 − Z )
1 − |Z | + Z − Z ∗
.
ζ=
=
=
1 − Z (1 − Z )(1 − Z ∗ ) 1 + |Z |2 − (Z + Z ∗ )
| {z }
∗
2
2 Re{Z }
Assim
Im
X
∞
n=1
n impar
n
Z
1
2 Im {Z }
= tanh−1
.
n
2
1 − |Z |2
Como
Z = ei π(x+i y)/a = eπ(−y+i x)/a
=⇒
Im {Z } = e−πy/a sen
πx
,
a
|Z | = e−πy/a ,
resulta finalmente
à −πy/a
!
Ã
!
µ
¶
X
n
∞
2e
sen πx
2 sen πx
sen πx
Z 1
1
1
a
a
a
−1
−1
−1
Im
= tanh
= tanh
= tanh
πy
2
2
1 − e−2πy/a
eπy/a − e−πy/a
senh a
n=1 n
2
n impar
e
Unifei
Ã
!
sen πx
2V0
a
−1
V (x, y) =
tanh
πy
π
senh a
Eduardo Resek
90
Capítulo 4 Soluções de problemas em eletrostática
4.4.2 Separação de Variáveis em Coordenadas Esféricas com Simetria
Azimutal
Existe uma classe muito grande de problemas cuja geometria apresenta simetria
azimutal, isto é, o potencial é independente da coordenada angular ϕ,
V (r) = V (r, θ).
Para essas situações, a equação de Laplace se simplifica, em coordenadas esféricas, para
µ
¶
µ
¶
1 ∂
∂V
1
∂
∂V
∇2V = 2
r2
+ 2
sen θ
= 0.
r ∂r
∂r
r sen θ ∂θ
∂θ
Tentamos então separar as variáveis com uma solução do tipo V (r, θ) = R(r )Θ(θ).
Substituição na equação de Laplace resulta em
µ
¶
µ
¶
R(r ) d
dΘ
Θ(θ) d
2 dR
r
+ 2
sen θ
= 0.
r 2 dr
dr
r sen θ d θ
dθ
Dividindo por RΘ/r 2 e reorganizando, vem
¤
1 d £ 2 0 ¤
1
d £
r R (r ) = −
sen θ Θ0 (θ)
R(r ) d r
sen θΘ(θ) d θ
Novamente, o primeiro e segundo membros contêm funções de variáveis totalmente distintas, e somente podem ser iguais se ambos forem independentes
das respectivas variáveis, ou seja, se forem iguais a um constante, digamos k. As
equações separadas para r e θ ficam
d £ 2 0 ¤
r R (r ) − kR(r ) = 0
dr
¤
d £
sen θ Θ0 (θ) + k sen θ Θ(θ) = 0.
dθ
e
Consideremos primeiramente a equação em θ; A substituição de variáveis
x = cos θ
=⇒
dΘ
dΘ
= − sen θ
,
dθ
dx
¤
d £
d 2Θ
dΘ
sen θ Θ0 (θ) = (1−x 2 ) 2 −2x
dθ
dx
dx
conduz à equação de Legendre:
(1 − x 2 )
d 2Θ
dΘ
− 2x
+ kΘ = 0,
d x2
dx
que só possui soluções regulares se a constante k for da forma `(` + 1),
claro que a solução em θ deve satisfazer a esse quesito, de modo que
(1 − x 2 )
` ∈ N. É
d 2Θ
dΘ
+ 2x
+ `(` + 1)Θ = 0,
d x2
dx
tendo solução regular
Θ` (x) = P ` (x)
Eduardo Resek
ou
Θ` (θ) = P ` (cos θ).
Unifei
4.4 O Método da Separação de Variáveis
91
Com isto, a equação da parte radial,
d £ 2 0 ¤
r R ` (r ) − `(` + 1)R ` (r ) = 0
dr
é facilmente solucionada tentando uma solução em série de potências. Na verdade, é trivial verificar que r ` e r −(`+1) são as duas soluções linearmente independentes de que necessitamos, ou seja
R ` (r ) = A ` r ` +
B`
r `+1
,
e como ` pode ser qualquer inteiro não negativo (inclusive 0), a solução completa
fica
¶
∞ µ
X
B`
`
V (r, θ) =
A ` r + `+1 P ` (cos θ)
r
`=0
Exemplo 4.3 Dois hemisférios metálicos - Cada hemisfério de uma esfera
de raio a está isolado um do outro e mantido a potenciais −V, +V , como
mostrado na figura. Como existe simetria azimutal, para obter o potencial
em todo o espaço, devemos resolver a equação de Laplace em coordenadas
esféricas com as seguintes condições de contorno:
(
+V0 , para 0 ≤ θ < π/2,
V=
−V0 , para π/2 < θ ≤ π
Claramente devemos dividir a solução em duas regiões distintas: r < a e
r > a. Sejam V1 e V2 tais soluções, respectivamente:
¶
∞ µ
X
B`
V (r < a, θ) =V1 =
A ` r ` + `+1 P ` (cos θ),
r
`=0
¶
µ
∞
X
D`
V (r > a, θ) =V2 =
C ` r ` + `+1 P ` (cos θ).
r
`=0
z
θ
P
r
±V0
a
Figura 4.5 Esfera com hemisférios
isolados ligada a bateria
Como o potencial deve ser finito em todo o espaço, eliminamos os coeficientes B ` e C ` , que causariam um comportamento divergente de V1 e V2
quando r → 0 e r → ∞, respectivamente. Ficamos com
V1 (r, θ) =
V2 (r, θ) =
∞
X
`=0
∞
X
`=0
A ` r ` P ` (cos θ),
D`
r `+1
P ` (cos θ).
Uma condição de contorno adicional exige a continuidade do potencial,
em particular em r = a:
¶
∞ µ
X
D`
`
V1 (a, θ) = V2 (a, θ)
=⇒
A ` a − `+1 P ` (cos θ) = 0, ∀θ.
a
`=0
Unifei
Eduardo Resek
92
Capítulo 4 Soluções de problemas em eletrostática
Como os polinômios de Legendre de ordens distintas são linearmente
independentes entre si, decorre
D ` = a 2`+1 A ` .
Resta agora determinar apenas as constantes A`. Para isso, observamos
que em r = a,
(
∞
X
+V0 , para 0 ≤ θ < π/2,
V (a, θ) =
A ` a ` P ` (cos θ) = f (θ) =
.
−V0 , para π/2 < θ ≤ π
`=0
Isso constitui uma expansão em série de Fourier-Legendre, análoga às bem
conhecidas séries de Fourier trigonométricas. O coeficiente α` = A ` a `
pode ser calculado por
Z π
` 2` + 1
f (θ)P ` (cos θ) sen θ d θ
α` = A ` a =
2
0
!
ÃZ π
Z π
2
2` + 1
P ` (cos θ) sen θ d θ −
P ` (cos θ) sen θ d θ .
V0
=
π
2
0
2
Em termos de x = cos θ, as integrais entre parêntesis ficam
1
Z
0
Z
P ` (x) d x −
0
1
Z
P ` (x) d x =
−1
|
{z
}
0
0
Z
P ` (x) d x +
1
P ` (−x) d x
x→−x
1
Z
=
0
h
iZ 1
`
P ` (x) d x.
[P ` (x) − P ` (−x)] d x = 1 − (−1)
0
Assim, os coeficientes se anularão para qualquer ` par, α2` = 0. Para `
ímpar, fica
α2`−1 = 2(−1)`
(2` − 3)!! (4` − 1)
V,
2
`! 2`
para ` = 1 temos:
α1 = 3V0
1
Z
0
x dx =
para ` > 1;
3
V0 .
2
Com isso,
A1 =
3V0
,
2a
D 1 = a2 A1 =
3aV0
,
2
e
D 2`−1 = (−1)` (4` − 1)
A2`−1 = (−1)` (4` − 1)
(2` − 3)!!
`! 2` a 2`−1
V0
(2` − 3)!!
a 2`+1 V0 , ` = 2, 3, ...
`! 2`
Assim, se definirmos (−1)!! = 1, a solução final pode ser escrita como
V (r, θ) = V0
∞
X
`=1
Eduardo Resek
(−1)`+1 (4`−1)
(2` − 3)!! ³ r ´2`−1
P 2`−1 (cos θ),
a
`! 2`
para r < a,
Unifei
4.4 O Método da Separação de Variáveis
93
e
V (r, θ) = V0
∞
X
(−1)`+1 (4` − 1)
`=1
(2` − 3)!! ³ a ´2`
P 2`−1 (cos θ),
r
`! 2`
para r > a,
Fica proposta a tarefa de calcular as densidades de cargas presentes nas
placas condutoras que formam os hemisférios.
4.4.3 Separação de Variáveis em Coordenadas Cilíndricas com potencial independente de z
∇2V =
µ
¶
∂V
1 ∂2V
1∂
ρ
+ 2
ρ ∂ρ
∂ρ
ρ ∂ϕ2
Assumimos V da forma V (ρ,ϕ) = R(ρ)Φ(ϕ). Substituição na equação conduz a
Φ d £ 0 ¤ R d 2Φ
,
ρR (ρ) + 2
ρ dρ
ρ d ϕ2
ou
ρd £ 0 ¤
1 d 2Φ
= λ2
ρR (ρ) = −
R dρ
Φ(ϕ) d ϕ2
que implica na separação das equações para ρ e ϕ:
ρ 2 R 00 (ρ) + ρR 0 (ρ) − λ2 R(ρ) = 0,
Φ00 (ϕ) + λ2 Φ(ϕ) = 0.
Podem ocorrer três situações:
λ = 0 A solução será da forma
R(ρ) = A 0 + B 0 ln ρ,
Φ(ϕ) = C 0 + D 0 ϕ.
λ 6= 0, λ ∈ N Teremos soluções periódicas em ϕ:
Φλ (ϕ) = C λ cos λϕ + D λ sen λϕ.
A solução radial pode ser obtida pelo método usual de série de potências, mas é
fácil verificar que, neste caso, a solução será
R λ (ρ) = A λ ρ λ +
Bλ
ρλ
.
A solução geral, como sempre, será a combinação linear dos Φλ para todos os
possíveis valores de λ:
µ
¶
X
¢
Bλ ¡
λ
V (ρ, ϕ) = (A 0 + B 0 ln ρ)(C 0 + D 0 ϕ) +
A λ ρ + λ C λ cos λϕ + D λ sen λϕ
ρ
λ
Nas situações onde toda a faixa de valores de ϕ é permitida, isto é, 0 ≤ ϕ < 2π,
a condição de periodicidade exige que V (ρ,ϕ + 2π) = V (ρ,ϕ), o que só pode
Unifei
Eduardo Resek
94
Capítulo 4 Soluções de problemas em eletrostática
ser satisfeito se λ ∈ N; denotaremos λ = n; ainda, obrigatoriamente D 0 = 0 e a
constante C 0 será absorvida em A 0 e B 0 :
µ
¶
X
¢
Bn ¡
n
V (ρ, ϕ) = A 0 + B 0 ln ρ +
A n ρ + n C n cos nϕ + D n sen nϕ .
ρ
n
O termo logarítimico é característico de uma linha infinita carregada, e só estará
presente se houver uma tal linha carregada no eixo z. Se não houver singularidade
na origem, B n = 0, ∀n. Da mesma forma, se o potencial for finito para ρ → ∞,
B 0 = 0 e A n = 0, n > 0.
Há situações em que a faixa de variação de ϕ é restrita a uma região menor que
2π (veja a lista de problemas propostos). Nessas condições, abre-se uma outra
possibilidade de soluções para a equação separada. Poderemos ter a possibilidade
de valores negativos λ2 ! Poremos λ2 = −ν2 , com ν ∈ N. As soluções em ϕ serão da
forma
Φν (ϕ) = C ν cosh νϕ + D ν senh νϕ,
enquanto que as soluções radiais serão exponenciais complexas do tipo ρ ±i ν .
Entretanto, como
.
.
.
.
.
ln ρ ±ı ν = ± ı ν ln ρ =⇒ ρ ±ı ν = e±ı ν ln ρ = cos(ν ln ρ) ± ı sen(ν ln ρ)
podemos escrevê-las como uma combinação linear de senos e cossenos de ν ln ρ.
A solução geral então se escreve na forma
i
Xh
V (ρ, ϕ) = (A 0 +B 0 ln ρ)(C 0 +D 0 ϕ)+
A ν cos(ν ln ρ)+B ν sen(ν ln ρ) (C ν cosh νϕ+D ν senh νϕ)
ν
4.4.4 Separação de Variáveis em Coordenadas Cilíndricas
A forma geral da equação de Laplace em coordenadas cilíndricas é
µ
¶
1∂
∂V
1 ∂2V ∂2V
∇ V=
ρ
+ 2
+
= 0,
ρ ∂ρ
∂ρ
ρ ∂ϕ2 ∂z 2
2
que tentaremos resolver novamente utilizando o método da separação de variáveis, agora com
V = V (ρ, ϕ, z) = R(ρ)Φ(ϕ)Z (z).
Substituindo acima e divindo por RΦZ , obtemos
µ
¶
1 d
dR
1 d 2Φ
d2Z
ρ
+ 2
=
−
.
ρR d ρ
dρ
ρ Φ d ϕ2
d z2
Isso só é possível se ambos os termos forem constantes, que denominaremos
β. Escolhemos a constante de separação β de acordo com as condiçoes de contorno. Independência de z (geralmente em geometrias com fios ou cilindros
infinitos) leva à escolha β = 0, que já foi estudada anteriormente. Periodicidade
em z implica em β > 0, que deixaremos proposto como exercício. O caso β < 0,
Eduardo Resek
Unifei
4.4 O Método da Separação de Variáveis
95
que enfatizaremos escrevendo β = −λ2 , será analisado a seguir. As equações
separadas ficam
µ
¶
dR
1 d 2Φ
1 d
ρ
+ 2
+ λ2
ρR d ρ
dρ
ρ Φ d ϕ2
= 0
d2Z
− λ2 Z
d z2
= 0.
A equação em z tem solução imediata:
Z (z) = E λ eλz + F λ e−λz
ou
Z (z) = E λ cosh λz + F λ senh λz
Multiplicando a outra equação por ρ 2 e reorganizando, fica
ρ
µ
¶
1d
dR
1 d 2Φ
= ν2 ,
ρ
+ ρ 2 λ2 = −
R dρ
dρ
Φ d ϕ2
pois novamente a igualdade só é possível se ambos os membros forem constantes. A escolha de uma constante positiva (se ν ∈ N, ν2 > 0) implica soluções
trigonométricas para Φ:
Φ(V ) = C ν cos νϕ + D ν sen νϕ,
enquanto que a equação na coordenada radial
ρ2
∂R
∂2 R
+ρ
+ (λ2 ρ 2 − ν2 )R = 0,
∂ρ 2
∂ρ
ou de forma equivalente,
µ
¶
∂2 R 1 ∂R
ν2
2
+
+
λ
−
R = 0,
∂ρ 2 ρ ∂ρ
ρ2
se transforma na equação diferencial de Bessel através da mudança de variáveis:
ξ = λρ =⇒
d
d
=λ
,
dρ
dξ
2
d2
2d
=
λ
,
d 2ρ
d 2ξ
cuja substituição leva a
∂2 R
λ2 2
∂ρ
ou finalmente
µ
¶
λ2 ∂R
λ2 ν2
2
+ λ − 2 R = 0,
+
ρ ∂ρ
ρ
µ
¶
∂2 R 1 ∂R
ν2
+
+
1
−
R = 0,
∂ρ 2 ρ ∂ρ
ρ2
que é a equação de Bessel. Vimos que suas soluções são da forma
R(ξ) = A ν J ν (ξ) + B ν Nν (ξ),
Unifei
Eduardo Resek
96
Capítulo 4 Soluções de problemas em eletrostática
onde J ν e Nν são, respectivamente, as funções de Bessel e de Neumann de primeira espécie. Em termos de ρ:
R(ρ) = A ν J ν (λρ) + B ν Nν (λρ).
Podemos então apresentar a solução geral para esse caso:
V (ρ, ϕ, z) =
X£
ν,λ
Eduardo Resek
¤
A ν J ν (λρ) + B ν Nν (λρ) (C ν cos νϕ+D ν sen νϕ)(E λ cosh λz+F λ senh λz)
Unifei
Capítulo 5
Capacitores
Objetivos
Ao final desse capítulo, você deverá ser capaz de:
a) Explicar a ideia de capacitância e definir o que é um capacitor.
b) Determinar a energia total armazenada por um capacitor em função da tensão
ou da carga acumulada nas suas placas.
c) Reconhecer associação em série e em paralelo de capacitores e calcular sua
capacitância equivalente.
d) Calcular capacitância de capacitores com geometrias diversas (placas planas,
cilìndricas e esféricas).
e) Explicar como a introdução de um meio isolante entre as placas condutoras
altera a capacitância de um dispositivo.
f ) Entender o que são cargas de polarização e qual seu efeito no campo elétrico
total.
5.1 O que são
Genericamente, denominamos capacitores ou condensadores qualquer dispositivo capaz de acumular, armazenar e reter carga elétrica (equivalentemente,
energia elétrica, pois carga cria campo elétrico e campo contem energia potencial
elétrica). Geralmente são constituídos por pelo menos duas placas condutoras isoladas entre si. São elementos importantes, presentes em praticamente
qualquer circuito elétrico.
5.2 Capacitância
Definimos a capacitância do dispositivo como a razão entre a carga Q que ele
acumula e a tensão V a que foi submetido:
C=
Q
.
V
97
(5.1)
C1
C2
Figura 5.1 Símbolos do capacitor
98
Capítulo 5 Capacitores
A unidade no sistema internacional é coulomb/volt, também denominada farad
(F), em homenagem a Michael Faraday. No sistema CGS, a unidade é o centímetro.
Um farad é uma unidade muito grande: um capacitor de 1F seria capaz de acumular uma carga de 1,5C quando conectado a uma pilha comum AA! A força entre as
placas seria descomunal e ele teria que ser muito bem construído para resistir a
ela sem colapsar. Comercialmente, são comuns capacitores com capacitâncias
na faixa dos microfarads (1 µF = 10−6 F) até picofarads (1 pF = 10−12 F)
5.3 Energia armazenada
Vamos conectar um capacitor inicialmente descarregado, como o da figura, a
uma bateria de tensão V0 . Essa bateria passa a carregar o capacitor, criando um
campo elétrico entre suas placas, que armazena energia. A energia armazenada
no capacitor provem do trabalho realizado pela bateria ao transportar cargas
de uma placa à outra daquele, contra o campo elétrico que vai aumentando
gradativamente à medida que as placas se carregam. Suponha que, num determinado instante, a carga das placas seja ±q(t ) e a tensão entre as placas seja V (t ).
Para transportar uma carga adicional d q de uma placa a outra, o trabalho dW
realizado pela bateria será1
dW = V (t ) d q =
q(t )
d q.
C
A energia acumulada no campo elétrico será o trabalho total realizado pela bateria desde o instante inicial até o momento atual. Supondo que a carga nesse
momento seja Q, essa energia então será
Z
U=
Q
Z
dW =
0
Q2 1
q
d q =⇒ U =
= CV 2 .
C
2C 2
(5.2)
5.4 Associação de capacitores
Assim como resistores, capacitores podem ser associados em série e/ou paralelo,
e muitas vezes é necessário determinar a capacitância equivalente de um tal
associação. Definimos como capacitância equivalente a capacitância de um
único dispositivo que, conectado a um determinada fonte, exige dela a mesma
quantidade de carga que o conjunto original.
5.4.1 Associação em paralelo
Se conectarmos uma fonte de tensão V ao terminal comum do banco formado por
N capacitores, cada um deles ficará submetido à mesma diferença de potencial
1 Como o campo eletrostático é conservativo, não precisamos calcular o trabalho pelo caminho
real seguido pela carga, que passa pela bateria. Esse trabalho somente depende da diferença de
potencial entre os pontos inicial e final do trajeto, que é justamente a tensão V naquele instante,
bem como da carga d q que foi transferida de uma placa à outra (cf. eq. (3.8)).
Eduardo Resek
Unifei
5.4 Associação de capacitores
99
V , de modo que cada um deles será carregado com uma carga
Q 1 = C 1V,
Q 2 = C 2V,
Q N = C N V.
...,
A carga total fornecida pela fonte ao conjunto é a soma de todas elas:
!
Ã
N
X
Q t = Q 1 +Q 2 + · · · +Q N = (C 1 +C 2 + · · · +C N )V =
C i V.
i =1
Um único capacitor de capacitância equivalente C eq deve exigir da fonte a mesma
carga total, de modo que
Ã
!
N
X
Q t = C eqV =
C i V,
i =1
ou seja
C eq = C 1 +C 2 + · · · +C N =
N
X
Ci .
(5.3)
i =1
5.4.2 Associação em série
Nessa configuração, se conectarmos uma fonte de tensão V aos terminais do
conjunto, ela irá transferir uma carga +Q à placa do capacitor conectado ao
seu terminal positivo, e uma carga oposta, −Q, à placa do capacitor na outra
extremidade, que está conectado ao seu terminal negativo. Cargas ±Q surgirão
nas demais placas dos capacitores do conjunto por indução, como ilustrado na
figura. Cada capacitor será carregado com a mesma carga, e ficará submetido a
diferenças de potenciais como a seguir:
Q
V1 =
,
C1
Q
V2 =
,
C2
C1
C2
CN
Figura 5.2 Ligação em série
Q
. . . ,VN =
.
CN
Somando todos esses potenciais, obtemos a diferença de potencial total aplicada
pela fonte ao conjunto2
V1 + V2 + · · · + VN = V,
2 Esta é uma afirmação que normalmente é justificada com base na primeira lei de Kirchhoff: a
soma das quedas de tensão num circuito fechado se anula. Porém, a essa altura do desenvolvimento
do texto, é mister apresentar argumentos mais convincentes, haja vista que ainda não abordamos
tais leis. Um entendimento pleno só será possível após estudarmos a lei de Faraday, mas por ora,
considere esse fato como uma consequência da propriedade conservativa do campo:
I
Z
Z
Z
Z
E·d r = 0 =⇒ E· d r + E· d r + · · · +
E· d r +
E· d r = 0.
`
1
2
N
eq
Cada integral, exceto o último é realizado da placa positiva à placa negativa de cada capacitor.
O último, através do capacitor equivalente, é da negativa à positiva, fechando o caminho de
integração. Os primeiros resultam em −Vi , i = 1, 2, . . . , N , e o último é equivalente a V . Assim,
V = V1 + V2 + · · · + V N .
Unifei
Eduardo Resek
100
Capítulo 5 Capacitores
isto é,
Q
Q
Q
+
+···+
= V.
C1 C2
CN
Por outro lado, um capacitor equivalente C eq ligado à mesma fonte será carregado
com a mesma carga Q que a fonte forneceria ao conjunto original, ou seja, Q:
Q = C eqV =⇒ V =
Q
.
C eq
Comparação das duas útimas expressões resulta em
N 1
X
1
1
1
1
=
+
+···+
=
.
C eq C 1 C 2
C N i =1 C i
(5.4)
5.5 Calculo de capacitância
Nesta seção determinaremos a capacitância de alguns dispositivos com geometria simples: placas planas paralelas, placas esféricas e placas cilíndricas. O
procedimento é sempre o mesmo: suponha uma fonte de tensão V conectada às
placas do capacitor. A diferença de potencial pode ser escrita como a integral do
campo elétrico, de acordo com
Z +
Z −
V = V (+) − V (−) = −
E· d r =
E· d r.
−
+
A seguir, determinamos o campo elétrico na região entre as placas, geralmente
utilizando a lei de Gauss aplicada a uma superfície gaussiana adequada, que
envolva uma das placas do capacitor, ou parte dela. Com isso obtemos o campo
elétrico em função da carga de uma das placas, tornando possível determinar a
relação Q/V .
5.5.1 Capacitor de placas planas paralelas
O campo elétrico entre as placas não é de fato uniforme, mas para capacitores
cuja distância entre as placas seja muito menor que a menor dimensão linear das
placas, a aproximação de campo uniforme fornece resultados bem satisfatórios.
Com essa hipótese, escolhemos uma superfície gaussiana cilíndrica com seção
reta de área A 0 paralela à placa, tal como a mostrada na figura. A base superior
do cilindro está no interior da placa condutora, onde o campo elétrico é nulo,
portanto só haverá fluxo através da tampa inferior. A lei de Gauss fornece
E A0 =
σA 0
σ
=⇒ E = (−ẑ).
²0
²0
Escrevendo alternativamente a densidade de cargas na placa como a relação
entre a sua carga total Q e a área total A
σ=
Eduardo Resek
Q
,
A
Unifei
5.5 Calculo de capacitância
resulta
Z
V=
0
d
101
Q
(−ẑ)·d r =
²0 A
d
Z
0
Q
Qd
dz =
,
²0 A
²0 A
de onde
A
Q
= ²0 .
V
d
Com todas as aproximações que fizemos (campo uniforme e distribuição uniforme de cargas nas placas), este resultado envolve um erro de apenas 4% para
um capacitor quadrado onde a distância entre as placas seja em torno de um
décimo da dimensão das placas!
C=
5.5.2 Capacitor de placas esféricas
Nesse caso o resultado é exato, não há necessidade de fazermos aproximações. O
campo elétrico pode ser obtido facilmente pela lei de Gauss, utilizando-se uma
superfície gaussiana esférica tal como a da figura:
I
Q
Q
E·n̂ d S = 4πr 2 E =
=⇒ E =
r̂,
²0
4π²0 r 2
S
e como em coordenadas esféricas, d r = d r r̂ + r d θ θ̂ + r sen θ d ϕ ϕ̂, o produto
escalar E· d r será E d r , levando a
µ
¶
Z R2
Q
Q
1
1
Q(R 2 − R 1 )
V=
d
r
=
−
=
,
2
4π²0 R 1 R 2
4π²0 R 1 R 2
R 1 4π²0 r
isto é,
C=
4π²0 R 1 R 2
.
R2 − R1
Uma esfera condutora de raio R pode ser considerada como o caso limite de
um capacitor com placa interna de raio R 1 = R e placa externa de raio R 2 → ∞.
Sua capacitância é portanto
C = 4π²0 R
5.5.3 Capacitor de placas cilíndricas
Para um capacitor cilíndrico infinito de placas coaxiais e distribuição de cargas
uniformes, o campo entre as placas seria axialmente simétrico, E = E (ρ) ρ̂. Para
capacitor finito de comprimento `, haverá um desvio desse comportamento
nas proximidades de suas extremidades. Assim como no caso do capacitor de
placas planas, o erro introduzido no cálculo não será grande se utilizarmos a
aproximação de simetria, desde que o comprimento do capacitor seja muito
maior que o raio de sua maior placa.
Considere o capacitor de placas condutoras cilíndricas coaxiais de comprimento ` e raios interno e externo respectivamente iguais a R 1 e R 2 , como na
figura, onde conectamos uma bateria de tensão V com a polaridade mostrada
Unifei
Eduardo Resek
102
Capítulo 5 Capacitores
(polo positivo na placa externa, negativo na placa interna). Utilizando uma superfície gaussiana como a ilustrada na figura, podemos calcular o campo na região
de interesse, R 1 < ρ < R 2 :
I
Q int
.
E·n̂ d S = 2πρ`E =
²0
S
Como a placa interna adquire carga negativa, que aproximaremos como distribuída uniformemente, a carga interna à gaussiana é
Q int = σ2πR 1 `0 ,
com
Assim,
E=−
σ=
Q`0
−Q
=⇒ Q int = −
.
2πR 1 `
`
Q
ρ̂
2π²0 `ρ
A d.d.p. entre as placas é igual à da bateria conectada:
Z
V = V (R 2 )−V (R 1 ) = −
R2
R1
−Q
Q
ρ̂·(d ρ ρ̂+ρ d ϕ ϕ̂+d z ẑ) =
2π²0 `ρ
2π²0 `
Z
R2
R1
dρ
Q
R2
=
ln .
ρ
2π²0 ` R 1
Obtemos então para a capacitância:
C=
2π²0 `
³ ´.
ln RR21
5.6 Capacitores com dielétricos
Usualmente os capacitores são construídos com materiais isolantes preenchendo
a região entre suas placas condutoras. Isso serve ao propósito não apenas de conseguir uma maior eficiência na armazenagem de carga e energia, como também
ao de otimizar o projeto no quesito de sustentação mecânica das placas condutoras. A desvantagem é que devemos nos atentar para o limite de tensão a que
ele pode ser submetido. Cada material tem um valor máximo de campo elétrico
que ele suporta sem comprometer a integridade de suas moléculas, conhecido
como rigidez dielétrica do material. Campos de intensidades acima desse valor
podem causar a ruptura de algumas moléculas, provocando ionização deste e
sua descaracterização como isolante, fato semelhante ao que ocorre com o ar em
tempestades, quando um raio é deflagrado. Como as distâncias entre as placas
condutoras são geralmente muito pequenas, o campo elétrico entre elas pode
facilmente atingir valores elevados, às vezes próximos ao de ruptura. A tabela
mostra valores de rigidez dielétrica para alguns materiais tipicamente utilizados
como isolantes em capacitores.
O que ocorre quando inserimos um material dielétrico no interior de um capacitor? Tomemos com exemplo o capacitor de placas planas paralelas estudado
Eduardo Resek
Unifei
5.6 Capacitores com dielétricos
103
na seção 5.5.1. Inicialmente a vácuo, ele adquire uma carga de módulo Q em
cada placa quando conectado a uma bateria de tensão V , sendo sua capacitância
C=
A
Q
= ²0 .
V
d
Introduzindo um dielétrico, todas as suas moléculas serão submetidas a um
campo uniforme. Na ausência de um campo externo, as moléculas em geral se
comportam de maneira neutra do ponto de vista elétrico. Sua carga elétrica total
é nula e, com poucas exceções, seu momento de dipolo elétrico total é nulo, pois
o centro geométrico das cargas negativas coincide com o centro geométrico das
cargas positivas. Na presença de um campo externo, entretanto, existirá uma
força elétrica adicional sobre os elétrons na mesma direção, mas oposta ao campo
aplicado. Essa força fará com que os orbitais dos elétrons sejam ligeiramente
deslocados nessa direção, passando o centro de cargas negativas a não mais
coincidir com o das cargas positivas, formando um pequeno dipolo elétrico. O
centro das cargas negativas desloca-se no sentido oposto do campo externo, de
modo que o vetor momento de dipolo elétrico da molécula, nesse novo estado,
será paralelo (mesma direção e sentido) ao campo.
No caso do nosso capacitor, todas as moléculas irão sofrer a mesma distorção,
dado que o campo externo é uniforme. O efeito global disso é que nas superfícies
do dielétrico normais ao campo, surgirão cargas de polarização, negativas onde o
campo penetra no dielétrico e positivas onde ele sai do dielétrico. Não fosse o
campo uniforme, surgiriam também cargas de polarização ao longo do volume do
dielétrico, pois as moléculas distorcidas pelo campo poderiam dar origem a densidades médias não nulas. Nesse nosso exemplo, em qualquer pequeno elemento
de volume considerado, a soma das cargas positivas e negativas (aqui consideradas como as cargas +q e −q dos centros geométricos de cargas das moléculas) se
anula, devido à uniformidade da distribuição dos dipolos moleculares.
Se o capacitor for carregado à vácuo, desligado da fonte de tensão e então
preenchido com um material isolante, essas cargas superficiais de polarização
criarão um campo oposto ao das placas do capacitor, fazendo com que o campo
total seja de intensidade menor que na situação à vácuo. Como a d.d.p. entre as
placas é a integral de linha do campo elétrico entre elas, essa quantidade sofrerá
um decréscimo em relação ao valor original. Isso se traduz numa capacitância
maior que aquela à vácuo, pois com a mesma quantidade de cargas armazenada
(a bateria foi desligada, portanto a carga nas placas não se altera), a diferença de
potencial é menor:
C0 =
Q
,
V0
com
V 0 < V =⇒ C 0 > C .
Se, por outro lado, mantivermos a bateria conectada ao introduzirmos o
dielétrico, ela forçará o campo resultante dentro do capacitor a ter o mesmo valor.
Como sabemos que os dipolos moleculares criam um campo em sentido oposto
a este, o campo criado pelas placas condutoras deve sofre um acréscimo igual
em módulo ao valor do campo criado pelos dipolos. Isso só é possível com um
Unifei
Eduardo Resek
104
Capítulo 5 Capacitores
aumento da quantidade de cargas nas placas condutoras, que são supridas pela
bateria. Da mesma forma, isso revela um aumento da capacitancia do dispositivo,
haja vista que
Q0
C 0 = , com Q 0 > Q =⇒ C 0 > C .
V
Como as características geométricas do capacitor não foram alteradas, concluímos que, algebricamente, o responsável pelo acréscimo no valor da capacitância
deve estar relacionado com a constante ²0 . Devemos substituí-la por uma constante que seja característica do isolante, e ela será sempre maior que a do vácuo.
Eduardo Resek
Unifei
Capítulo 6
Dielétricos
Objetivos
Ao final desse capítulo, você deverá ser capaz de:
a) Explicar como uma molécula ou átomo submetido a um campo elétrico externo adquire um momento de dipolo elétrico e traduzir isso matematicamente definindo polarização.
b) Distinguir claramente entre polarização de cargas em um dielétrico e indução
de cargas em um condutor.
c) Determinar o efeito da polarização na distribuição efetiva de cargas de um
dielétrico polarizado.
d) Caracterizar o que são eletretos e como eles diferem de materiais polarizados
usuais.
e) Calcular as densidades de cargas volumétrica e superficiais de polarização,
bem como as respectivas cargas totais.
f ) Demonstrar que a carga total de polarização é sempre nula e explicar o significado físico disso.
g) Explicar a diferença entre cargas livres, de polarização e totais.
h) Mostrar que a lei de Gauss pode ser adaptada para a situação em que dielétricos estão presentes e explicar por que isso é necessário.
i) Definir o vetor deslocamento elétrico e calculá-lo utilizando a lei de Gauss.
j) Definir permissividade e susceptibilidade do meio dielétrico.
k) Obter os vetores campo elétrico e de polarização a partir do vetor deslocamento.
l) Analisar como os vetores E, D e P se comportam ao redor de uma interface de
separação entre dois meios distintos.
m) Determinar a energia elétrica de distribuições de cargas em materiais dielétricos.
n) Determinar a densidad de carga livre e a carga livre total conhecendo o vetor
deslocamento elétrico.
105
106
Capítulo 6 Dielétricos
6.1 Polarização
Algumas moléculas, como a da água, podem apresentar um momento de dipolo
elétrico permanente não nulo. Isso acontece devido à configuração de seus átomos constituintes, resultando em centros de cargas intrinsecamente separados.
Normalmente esses dipolos moleculares estão orientados aleatoriamente, produzindo um momento de dipolo total nulo para uma amostra finita do material,
mas eles podem ser alinhados pela ação de um campo externo, o que faz com que
o campo produzido pelo conjunto de dipolos se torne razoavelmente intenso.
Mesmo moléculas que não possuam tal propriedade são afetadas pela presença de um campo externo. Num material isolante um campo externo leva
a uma separação dos centros de cargas positiva e negativa nas suas moléculas
constituintes, produzindo pequenos dipolos que, em conjunto, irão também
gerar uma contribuição não desprezível ao campo e potencial da região. Em
ambas as situações, podemos tratar a contribuição dos pequenos dipolos moleculares definido o vetor Polarização P; qualquer elemento de volume, mesmo
que macroscopicamente muito pequeno, contem um número muito grande de
moléculas polarizadas. O momento de dipolo total desse pequeno volume, ∆p é
a soma dos momentos de dipolos das moléculas constituintes
X
∆p = pi .
E
p
Figura 6.1 Molécula apolar na
presença de campo externo
i
r−
0
r
dv
O vetor P é o momento de dipolo total por unidade de volume:
∆p
dp
=
,
0
∆v →0 ∆v
d v0
P = lim
0
dp
0
P
r
r0
O
Figura 6.2 Elemento de dipolo
d p = P d v 0.
Devemos lembrar que, apesar da natureza discreta da estrutura da matéria, do
ponto de vista macroscópico pode-se assumir que os dipolos estejam distribuídos
continuamente no interior do volume. Isso é uma aproximação, mas funciona
bem desde que o elemento de volume seja grande comparado com distâncias
interatômicas, e ainda assim pequeno comparado com a escala típica de variação
das grandezas que definem o campo eletrostático.
Consideremos um dielétrico ocupando uma região V 0 do espaço, onde por
uma razão ou outra, exista uma distribuição de dipolos elétricos. Um volume
d v 0 possuirá um momento de dipolo d p(r0 ) = P(r0 ) d v 0 , e sua contribuição para o
potencial num ponto r pode ser dada por
dVd =
1 d p·(r − r0 )
1 P(r0 )·(r − r0 )
=
d v 0.
0
3
4π²0 |r − r |
4π²0 |r − r0 |3
O potencial causado por toda a distribuição de dipolos será então
Z
1
P(r0 )·(r − r0 )
Vd =
d v 0.
4π²0 v 0 |r − r0 |3
(6.1)
Vamos utilizar a identidade
∇0
Eduardo Resek
1
r − r0
=
|r − r0 | |r − r0 |3
Unifei
6.2 Lei de Gauss na presença de dielétricos
107
para reescrever o integrando de (6.1) como
Z
1
1
P(r0 )·∇0
d v 0.
Vd =
4π²0 v 0
|r − r0 |
(6.2)
A seguir, empregamos a identidade
∇0 ·(ψA) = ψ∇0 ·A + ∇0 ·ψA
com ψ = |r − r0 |−1 e A = P(r0 ):
∇0 ·
P(r0 )
1
∇0 ·P(r0 )
=
+ P(r0 )·∇0
,
0
0
|r − r |
|r − r |
|r − r0 |
o que nos permite escrever (6.2) como
µ Z
¶
Z
0
∇0 ·P(r0 )
1
0
0 P(r )
0
dv + ∇ ·
dv ,
−
Vd =
0
4π²0
|r − r0 |
v0
v 0 |r − r |
ou, usando o teorema de Gauss na segunda integral
Vd =
1
4π²0
Z
v0
1
−∇0 ·P(r0 )
d v0 +
|r − r0 |
4π²0
I
S
P(r0 )·n̂
d S.
|r − r0 |
(6.3)
Reconhecemos nessa expressão a contribuição de uma distribuição volumétrica
e uma superficial de cargas,
ρ P = −∇·P
e
σP = P·n̂,
que representam as densidades de cargas de polarização no dielétrico. Elas
resumem o efeito da distribuição de dipolos.
6.2 Lei de Gauss na presença de dielétricos
Como vimos, os dielétricos podem ser polarizados pela ação de campos externos
e, em conseqüência, surgirão cargas que contribuirão para o campo total em
qualquer ponto da região. A lei de Gauss deve levar em conta tais cargas. Para
explicitar sua contribuição, vamos denotar por ρ ` a densidade de carga livre (em
excesso) em cada ponto; a densidade de carga total será
ρ = ρ` + ρP ,
de modo que a lei de Gauss fica
∇·E =
1
1
(ρ ` + ρ P ) = (ρ ` − ∇·P) =⇒ ∇·(²0 E + P) = ρ ` .
²0
²0
Definimos o vetor Deslocamento Elétrico como
D = ²0 E + P,
Unifei
(6.4)
Eduardo Resek
108
Capítulo 6 Dielétricos
em termos do qual a lei de Gauss assume a forma
∇·D = ρ ` .
(6.5)
A vantagem dessa formulação é que não precisamos, a priori, conhecer os efeitos
da polarização sobre o dielétrico, mas somente a carga em excesso deste. Na
forma integral teríamos
I
S
D·n̂ d S = Q i ` ,
(6.6)
R
onde Q i ` = ρ ` d v é a carga livre interna à superfície S. Para a maioria dos
materiais dielétricos, a polarização é diretamente proporcional ao campo elétrico
externo aplicado e independente da direção deste (meios isotrópicos ou lineares).
Nesses casos, definimos a susceptibilidade (di)elétrica como
P = χE.
A equação (6.4) pode ser reescrita como
D = (²0 + χ)E = ²E,
onde definimos a permissividade do meio, ², como ² = ²0 + χ. Costuma-se definir
também uma grandeza adimensional, a permissividade relativa ou constante
dielétrica do meio, como
²
κ = ²rel = .
²0
6.3 Condições de contorno para o campo elétrico
A
+ + + + + + + ++ + + + + + + + +
meio 1
+ ++++++
+ +
σ
E1
+
D1 n̂
Analisemos agora como se comporta o campo elétrico numa região onde existem
dois meios não condutores diferentes. A figura ilustra essa situação onde, além de
possíveis cargas livres distribuídas ao longo dos dielétricos, admitimos também
que possa haver uma carga livre na superfície interface entre os dois meios, cuja
densidade é ρ ` . A lei de Gauss aplicada a uma pequena superfície cilíndrica (área
t̂
da seção reta A e altura ∆h) atravessando perpendicularmente essa interface
∆`
fornece
I
++
+
+
D·n̂ d S = Q i ` ' ρ ` A,
+++ +
meio 2
+ ++++
E2
++
++
D2
+
+++
+++++++ +
Figura+6.3
Comportamento
dos
campos na fronteira entre meios
distintos
S
pois podemos imaginar uma seção reta suficientemente pequena a fim de desprezar quaisquer variações de ρ ` ao longo da mesma. Pelo mesmo motivo, o o
vetor deslocamento não sofrerá variações significativas ao longo das tampas do
cilindro gaussiano; por outro lado, o fluxo através da superfície lateral pode ser
desprezado no limite em que ∆h → 0. Sendo n̂ o versor perpendicular à interface
dos dielétricos, orientado do meio 1 para o meio 2, vem
I
D·n̂ d S ' D2 ·n̂ A + D1 ·(−n̂) A ' ρ ` A,
S
Eduardo Resek
Unifei
6.3 Condições de contorno para o campo elétrico
109
ou seja,
(D2 − D1 )·n̂ = ρ ` ,
ou D2n − D1n = ρ ` .
(6.7)
Se não houver cargas livres na interface, a componente normal do vetor deslocamento será contínuo através desta.
Por outro lado, considerando que o campo eletrostático é conservativo, o
percurso mostrado na figura, onde novamente ∆h → 0 e ∆l podem ser tomados
tão pequenos quanto se queira, permitindo assim calcular a integral nos trechos
do percurso que são paralelos à interface
I
E·d r ' E2 ·t̂ ∆l + E1 ·(−t̂) ∆l = 0,
`
isto é
(E2 − E1 )·t̂ = 0,
ou E 2t = E 1t ,
(6.8)
que significa que a componente de E tangente à interface não se altera ao atravessarmos de um lado para outro.
Unifei
Eduardo Resek
Parte II
Magnetostática
111
Capítulo 7
Corrente Elétrica
7.1 Corrente e densidade de corrente elétrica
A ideia de corrente elétrica está relacionada com o movimento ordenado de
cargas elétricas. Definimos corrente elétrica, usualmente representada por I ou
i , através de uma superfície S como a quantidade de carga que a atravessa por
unidade de tempo,
dq
i=
,
(7.1)
dt
e é medida em ampere (A).
Observe-se que num condutor à temperatura ambiente, mesmo em equilíbrio
eletrostático, seus elétrons da banda de condução estão em constante movimento
(de natureza térmica), o que entretanto não caracteriza uma corrente elétrica,
haja vista que é aleatório e que, num intervalo de tempo finito, os números de
elétrons atravessando a superfície em questão nos dois sentidos são iguais, perfazendo uma média nula. Só haverá movimento ordenado quando houver algum
dispositivo fornecendo energia em caráter contínuo às cargas numa certa região,
para que elas possam apresentar um movimento persistente. Este movimento
não é em geral, livre: num condutor, por exemplo, os elétrons em movimento
colidem com os átomos da rede e são desacelerados, transmitindo sua energia,
ou parte dela, aos referidos átomos, que passam a vibrar em uma amplitude
maior, o que se traduz em um aumento da temperatura do material condutor.
Para que o movimento continue, essa energia perdida pelos elétrons na colisão
deve ser continuamente reposta. Isso se traduz num campo elétrico não nulo
dentro do material, fornecido por um agente externo, um dispositivo denominado fonte (de tensão ou de corrente), capaz de prover essa energia necessária à
manutenção do movimento, às custas de algum processo de conversão interna
de energia (geralmente químico como nas pilhas e baterias ou mecânico, como
nos geradores).
Suponha que numa região os portadores de carga estejam em movimento ordenado com velocidade v. Considerando um intervalo de tempo ∆t e uma região
suficientemente pequenos, podemos admitir que essa velocidade é constante e
113
114
Capítulo 7 Corrente Elétrica
uniforme para os portadores de cargas locais, isto é, o vetor v é o mesmo para
todos eles e não se altera no intervalo referido. Para determinarmos a carga total
∆q que atravessa uma dada superfície ∆S, devemos contar o número de portadores de cargas capazes que, a partir de sua posição no início da contagem, se
movam adequadamente de modo a atravessar a superfície dentro do intervalo ∆t .
O deslocamento sofrido pelas cargas nesse tempo é de v∆t , de modo que todos os
portadores de carga que se encontrem dentro da região mostrada na figura, um
prisma paralelepipedal oblíquo, de área da base ∆S e aresta lateral v∆t . Sendo
α o ângulo entre o vetor velocidade e a normal à superfície ∆S, o volume desse
prisma é ∆v = v∆t cos α∆S (área da base ∆S multiplicada pela altura v∆t cos α),
ou
∆v = v·n̂ ∆S ∆t .
Uma característica físico-química de um dado material condutor é sua densidade
de portadores de carga (número de cargas disponíveis para condução por unidade
de volume), que denotaremos por n. Sabemos que um mol-kg de qualquer
material contém N A = 6,02·1026 átomos ou moléculas desse material (número de
Avogadro). Conhecendo a massa especifica µ do material, sua massa molecular
M e denotando por N` o número de elétrons livres de cada um deles (delas), é
fácil ver que
NAµ
n = N`
.
M
Para o alumínio, por exemplo,
N` = 3, µ = 2,7 · 103 kg/m3 M = 27 kg =⇒ n = 1,8 · 1028 m−3 .
Assim, a carga total que atravessará a superfície no intervalo ∆t será o produto de
nq pelo volume ∆v acima, onde q é a carga de cada portador:
∆q = nqv·n̂ ∆S ∆t .
Pela definição de corrente, (7.1), no limite ∆t → 0, ∆S → d S, temos
d i = nqv·n̂ d S.
A corrente será d i (infinitesimal) e não i , pois a área d S é infinitesimal. Definimos
o vetor densidade (volumétrica) de corrente J como
J = nqv,
e, para uma superfície finita qualquer S, reescrevemos a corrente como
Z
i = J·n̂ d S,
(7.2)
(7.3)
S
ou seja, a corrente através de uma superfície é o fluxo do vetor densidade de
corrente através dela. Muitas vezes escrevemos (7.2) como
J = ρv,
(7.4)
onde ρ = nq é a densidade volumétrica de cargas de condução.
Eduardo Resek
Unifei
7.2 Densidade superficial de corrente
115
7.2 Densidade superficial de corrente
Em determinadas situações é vantajoso expressar a corrente como uma densidade
superficial. Um exemplo seria uma carga fluindo através de uma chapa metálica
longa de largura `, mas de espessura muito fina, ou uma esteira carregada com
uma densidade superficial de cargas movendo-se com velocidade v, como num
gerador de van der Graaf. Usualmente denotada por K ouJ, teremos
Z
I = K·n̂×`ˆ d `, K = σv,
(7.5)
`
onde n̂ é um versor normal ao plano da corrente e `ˆ é um versor tangente à linha
`, através da qual as cargas se movem.
7.3 A lei de Ohm
Dizemos que num condutor em equilíbrio eletrostático não existem correntes
elétricas, mas isso não significa que sejam nulas as velocidades dos portadores
de cargas em seu interior. Eles estão em constante movimento devido à agitação
térmica, movimento esse de caráter aleatório. Se entretanto existir um campo
elétrico não nulo no interior de um condutor, suas cargas livres sofrerão forças
devidas a esse campo e, possuindo liberdade de movimento, estabelecerão uma
corrente, pois serão aceleradas pela força elétrica qE. O movimento não é totalmente livre, posto que os portadores de cargas sofrerão colisões ao longo de sua
trajetória, perdendo energia (esta energia perdida é transferida para os átomos
com os quais eles colidiram, provocando o aquecimento do material condutor).
É natural esperar que a aceleração dos portadores de cargas se dê na direção do
campo E. As colisões com os átomos são frequentes e o livre caminho médio dos
portadores é de fato pequeno. Verifica-se que essas cargas adquirem velocidades
médias paralelas ao campo aplicado:
v ∥ E,
e, em vista de (7.4),
J ∥ E.
Podemos então escrever, para tais materiais
J = g E,
(7.6)
onde g é um escalar. Para uma grande classe de materiais condutores, g é
razoavelmente independente do E ou J, dependendo entretanto da temperatura.
Esses materiais são ditos ôhmicos, e a equação (7.6) é conhecida com a forma
microscópica da lei de Ohm.
Se dois condutores distintos forem submetidos a um mesmo campo elétrico,
aquele de maior valor de g apresentará maior corrente, portanto g mede a capacidade do material de conduzir eletricidade. Ele é denominado condutividade do
Unifei
Eduardo Resek
116
Capítulo 7 Corrente Elétrica
material. Em termos de seu inverso, a resistividade, que denotaremos por η, a lei
de Ohm fica
E = ηJ.
(7.7)
A unidade de resistividade é portanto (V/m)/(A/m2 ) = (V/A).m. Na prática chamamos de Ω (ohm) a combinação V/A, assim
[η] = Ωm,
[g ] = (Ωm)−1 = f/m = S/m,
onde S é a sigla para siemens .
Para um trecho retilíneo de comprimento ` e seção reta uniforme A de um
condutor, submetido a uma diferença de potencial V enter suas extremidades,
teremos
Z
Z
Z
a
V =−
b
b
E·d r =
a
E d r = E `,
i=
S
J·n̂ d S = J A,
isto é, E = V /` e J = i /A, de modo que (7.7) se escreve
i
η`
V
= η =⇒ V =
i.
`
A
A
que resulta na conhecida forma macroscópica da lei de Ohm,
V = Ri
(7.8)
se definirmos a resistência R do condutor como
`
R =η .
A
7.4 Equação da continuidade
Imagine que cargas sejam produzidas no interior de um condutor. Elas irão se
repelir
S, definindo um volume de controle v. A carga total em cada instante no interior
do volume v é
Z
q(t ) = ρ d v,
v
onde ρ = ρ(r, t ) é a densidade instantânea de cargas em cada ponto do condutor.
Essa carga não permanece constante, pois vimos que os portadores tendem a se
afastar uns dos outros. A corrente através dessa superfície é dada por
I
i = J·n̂ d S,
S
mas também pode ser expressa pela definição (7.1):
Z
dq
d
i =−
=−
ρ d v.
dt
dt v
O sinal negativo deve-se ao fato que queremos expressar a corrente que deixa
o volume de controle, e a carga em seu interior está diminuindo com o tempo,
Eduardo Resek
Unifei
7.4 Equação da continuidade
117
de modo que d q/d t < 0, enquanto o fluxo de J na equação anterior é positivo
(lembre-se que, por convenção, para superfícies fechadas o versor n̂ é sempre
orientado para fora da superfície e, com J também saindo dela, o produto escalar
entre ambos será positivo). Ora, toda a carga que flui através de S veio de seu
interior, haja vista que não podemos criar nem destruir cargas elétricas. Assim,
pelo princípio da conservação das cargas
I
Z
d
J·n̂ d S = −
ρ d v,
(7.9)
dt v
S
é a chamada equação da continuidade (forma integral).
Para expressá-la na forma diferencial, basta utilizarmos o teorema de Gauss
no primeiro membro de (7.9):
I
Z
Z
∂ρ
J·n̂ d S = ∇·J d v = −
d v.
S
v
v ∂t
Como a igualdade é verdadeira par qualquer volume escolhido, decorre que
∇·J = −
∂ρ
,
∂t
(7.10)
que é a forma diferencial da equação da continuidade.
7.4.1 A lei de Kirchhoff das correntes
Um circuito elétrico possui em geral vários ramos e nós, por onde fluem correntes
que podem ser estacionárias (constantes ao longo do tempo) ou não. Uma das
leis básicas de circuitos, conhecida como a lei de Kirchhoff das correntes, afirma
que a soma algébrica das correntes que chegam num nó deve ser igual à soma
algébrica das correntes que saem dele. Esse resultado pode ser entendido, à
luz da equação da continuidade (7.9), calculando-se o fluxo de J através de uma
superfície fechada que envolva um determinado nó. Por exemplo, na figura
teremos
I
Z
Z
Z
J·n̂ d S =
J1 ·n̂1 d S 1 +
J2 ·n̂2 d S 2 +
J3 ·n̂3 d S 3 = −i 1 − i 2 + i 3 .
S
S1
S2
S3
Se as correntes forem estacionárias, as densidades de cargas ρ 1 , ρ 2 e ρ 3 permanecerão constantes, pois quaisquer cargas que deixem um elemento de volume
serão imediata e continuamente repostas por outras que se adentram pelo referido volume. Desse modo, a quantidade total de carga dentro de v permanece
constante e o segundo membro de (7.9) se anula, levando a
i1 + i2 = i3,
que é a lei de Kirchhoff para esse caso. Observe que isso não acontece para
correntes não estacionárias, onde em geral teremos
Z
d
ρ d v 6= 0 =⇒ i 1 + i 2 6= i 3 .
dt v
Unifei
Eduardo Resek
118
Capítulo 7 Corrente Elétrica
Entretanto, usualmente o termo da derivada no tempo é pequeno o suficiente
para ser desprezado, e a lei de Kirchhoff continua válida como uma boa aproximação. Para correntes alternadas, por exemplo, as grandezas variam com funções
como cos(ωt + ϕ), e suas derivadas serão proporcionais à frequência angular
ω = 2π f . Para circuitos de baixa frequência (50 ou 60 Hz), o erro pode ser desprezado, mas o mesmo não se aplica para frequências maiores, da ordem por
exemplo de GHz, que é justamente quando a radiação eletromagnética entra em
jogo.
7.4.2 Tempo de relaxação
Voltando à situação descrita na seção (7.4), para condutores ôhmicos J = g E e a
equação fica
∂ρ
g ∇·E +
= 0.
∂t
A lei de Gauss
ρ
∇·E = ,
²0
permite ainda reescrevê-la como
g
∂ρ
ρ+
= 0,
²0
∂t
cuja solução é imediata:
ρ(r, t ) = ρ 0 (r)e −g t /²0 .
Isso mostra que a densidade de cargas em cada ponto do interior do condutor
tende a zero exponencialmente com uma constante de tempo
τ=
²0
,
g
que para bons condutores é muito pequena (da ordem de 10−16 a 10−18 s).
Eduardo Resek
Unifei
Capítulo 8
Campo Magnético
8.1 O vetor indução magnética
8.2 Lei de Biot-Savart
8.2.1 Distribuições volumétricas de correntes
Foi descoberto pelo dinamarquês Hans Christian Oersted, por volta de 1820, que
corrente elétrica produz campo magnético. Até mesmo os campos gerados por
ímãs naturais podem ser modelados por alguma distribuição de corrente, de
modo que é de muito interesse sabermos calcular o vetor indução magnética
a partir de uma distribuição de correntes conhecida. A lei descoberta pelos
franceses Biot e Savart em 1821 permite tal feito. Em notação moderna, ela
estabelece que, dada uma distribuição representada por um vetor densidade de
corrente J(r0 ), a indução magnética num ponto r é
d B(r) =
µ0 J(r0 )×(r − r0 )
d v0
4π |r − r0 |3
(8.1)
Desse modo, a indução magnética total no ponto r será
B(r) =
µ0
4π
Z
v0
J(r0 )×(r − r0 )
d v 0,
|r − r0 |3
(8.2)
isto é, a soma das contribuições de cada possível elemento de corrente ao longo
de toda a distribuição.
A lei de Biot-Savart (8.1) acima é experimental, e será adotada como o ponto
de partida do qual deduziremos os principais resultados do magnetismo. Ela é
adequada para distribuições volumétricas de correntes e, conquanto qualquer
configuração possa ser descrita em termos de algum J, isso se torna às vezes
complicado, razão pela qual vamos adaptá-la para os casos (mais comuns) de
correntes filamentares (percorrendo fios de seção reta desprezível) e superficiais.
119
120
Capítulo 8 Campo Magnético
8.2.2 Correntes filamentares
Já vimos que basta fazer a substituição
J d v 0 −→ I d `0 ,
onde I é a corrente total através do fio. Desse modo, como a corrente ao longo do
fio é sempre a mesma:
Z
µ0 I
d `0 ×(r − r0 ) 0
B(r) =
dr .
(8.3)
4π `0 |r − r0 |3
8.3 Exemplos de aplicação
8.3.1 Espira circular
Uma espira circular de raio R é percorrida por uma corrente I como mostrado na
figura ao lado. A determinação do campo num ponto qualquer do espaço pode
ser feito com técnicas mais avançadas do que dispomos no momento (veja as
linhas de indução na figura), mas ao longo do eixo da espira, a lei de Biot-Savart
permite um cálculo rápido e fácil. Utilizaremos a forma (8.3) da lei de Biot-Savart.
Um elemento de corrente num ponto qualquer da espira pode ser descrito através
de
d `0 = R d ϕ0 ϕ̂0 ,
localizado no ponto genérico
r0 = R ρ̂ 0 .
Desejamos o campo em r = z ẑ, um ponto qualquer do eixo de simetria da espira,
que escolhemos como sendo z. Assim
p
r − r0 = z ẑ − R ρ̂ 0 ,
|r − r0 | = z 2 + R 2 ,
d `0 ×(r − r0 ) = R(z ρ̂ 0 + R ẑ) d ϕ0
e
µ0 I
B(z) =
4π
2π
Z
R(z ρ̂ 0 + R ẑ)
(z 2 + R 2 )3/2
0
d ϕ0 .
Pela simetria, esperamos que haja um campo apenas ao longo do eixo z. Matematicamente, na integral acima devemos substituir o ρ̂ 0 por suas componentes
cartesianas,
ρ̂ 0 = cos ϕ0 x̂ + sen ϕ0 ŷ,
e resulta que as integrais em x̂ e ŷ são ambas nulas:
2π
Z
0
cos ϕ0 d ϕ0 =
2π
Z
0
sen ϕ0 d ϕ0 = 0,
restando
B(z) = ẑ
Eduardo Resek
µ0 I R 2
4π(z 2 + R 2 )3/2
2π
Z
0
d ϕ,
Unifei
8.3 Exemplos de aplicação
121
ou seja
B(z) =
µ0 I R 2
2(z 2 + R 2 )3/2
ẑ
8.3.2 Fio retilíneo
Adotando o eixo z coincidindo com o fio, consideraremos dois casos:
a) um fio infinito, que constitui uma boa aproximação para as situações onde se
tem um fio muito longo e deseja-se o campo numa região não muito próxima
das suas estremidades;
b) fio finito de comprimento `.
Em qualquer dos casos, existe simetria azimutal, de modo que o campo B produzido num ponto qualquer ao redor do fio não irá depender da coordenada ϕ. No
caso do fio finito, dependerá da coordenada z. Entretanto, iremos adotar o ponto
de observação na origem e, em contrapartida, dispor o fio no eixo z de modo que
as coordenadas de suas extremidades sejam z 1 e z 2 genéricos. O vetor posição do
ponto de observação P será então
r = ρ ρ̂.
Para um elemento de corrente genérico no fio, situado a uma coordenada z 0
qualquer, temos
r0 = z 0 ẑ,
r − r0 = ρ ρ̂ − z 0 ẑ,
d `0 = d z 0 ẑ,
de modo que
|r − r0 | =
q
ρ 2 + z 02 ,
d `0 ×(r − r0 ) = d z 0 ẑ×(ρ ρ̂ − z 0 ẑ) = ρ d z 0 ϕ̂.
De acordo com (8.3), o campo B será
B(ρ) =
µ0 I
ρ ϕ̂
4π
Z
d z0
z2
z1
(ρ 2 + z 02 )3/2
Para fazer a integral é conveniente a substituição z 0 = ρ tan α, que implica
d z 0 = ρ sec2 α d α e (ρ 2 + z 02 )3/2 = ρ 3 sec3 α.
Denominando por α1 e α2 os limites na variável substituta α, fica
Z
µ0 I
µ0 I α2
B(ρ) = ϕ̂
cos α d α = ϕ̂
(sen α1 − sen α2 )
4πρ α1
4πρ
É mais costumeiro (e melhor) expressar esse resultado em termos dos ângulos β1
e β2 mostrados na figura ao lado; como β2 = α2 e β1 = π − α1 , temos
B(ρ) =
µ0 I
(cos β1 + cos β2 ) ϕ̂.
4πρ
(8.4)
Se o fio for infinito, β1 → 0, β2 → 0 e
B(ρ) =
Unifei
µ0 I
ϕ̂
2πρ
(8.5)
Eduardo Resek
122
Capítulo 8 Campo Magnético
8.3.3 Fio parabólico
um fio infinito é dobrado em forma de parábola como na figura, descrita pela
equação
y 2 = 4ax,
(8.6)
onde a é a distância do vértice da parábola ao seu foco. determinaremos o campo
B no seu foco,
r = a x̂,
utilizando a equação (8.3). É adequado utilizar coordenadas cartesianas para
efetuar o cálculo, de modo que o elemento infinitesimal de corrente terá como
vetor
d `0 = d x 0 x̂ + d y 0 ŷ.
as coordenadas x 0 e y 0 não são independentes, mas conectadas pela equação
(8.6):
¶
µ 0
y
0
0
0
0
y d y = 2a d x =⇒ d ` =
x̂ + ŷ d y 0 ,
2a
e seu vetor posição:
¶
y 02
r−r = a −
x̂ − y 0 ŷ,
4a
y 02
r = x x̂ + y ŷ =
x̂ + y 0 ŷ,
4a
0
0
0
µ
0
µ
¶1/2
y 04
y 02
y 02
02
|r − r0 | = a 2 +
−
+
y
=
a
+
16a 2
2
4a
Desse modo,
y0
d ` ×(r − r ) = ( x̂ + ŷ)
2a
0
0
·µ
¶
¸
µ 02
¶
y
y 02
0
0
x̂ − y ŷ d y = −
a−
+ a ẑ.
4a
4a
Com tudo isso, o campo será
µ0 I
B f = −ẑ
4π
Z
d y0
−∞
∞
³
´
y 02 2
.
a + 4a
Fazendo a substituição de variáveis y 0 = 2a tan α na integral acima, fica
B f = ẑ
µ0 I
4πa
π/2
Z
−π/2
ou
Bf =
Eduardo Resek
cos2 α d α,
µ0 I
ẑ
4a
Unifei
8.3 Exemplos de aplicação
123
8.3.4 Espira plana em forma de uma cônica
O exemplo anterior poderia ter sido equacionado em coordenadas polares (ou
cilíndricas no plano x y) com a vantagem de obtermos o resultado final com muito
menos esforço. Desenvolveremos nessa seção o cálculo da indução magnética no
ponto focal para um fio em forma de uma cônica (elipse, parábola ou hipérbole)
no plano x y. A forma geral de uma cônica em coordenadas polares é
ρ=
p
,
1 − e cos ϕ
(8.7)
onde e é a excentricidade da cônica (|e| = 1 para parábolas, 0 ≤ |e| < 1 para elipses
e |e| > 1 para hipérboles) e p é um parâmetro da cônica cujo significado varia
de acordo com seu tipo. Para uma parábola, é a metade de sua distância focal
(portanto, igual à distância entre o foco e o vértice), para uma elipse e hipérbole,
é metade da distância entre os focos.
Unifei
Eduardo Resek
124
Capítulo 8 Campo Magnético
AT X.
Documento redigido em L
E
Eduardo Resek
Unifei