1
Uma Contribuição para a Detecção de Faltas
Fase-Terra de Alta Impedância
Daniela O. Farina, B.Sc, UFU(*), José C. Oliveira Ph.D, UFU; José W. Resende, PhD, UFU
(*): UFU: Universidade Federal de Uberlândia
Resumo – Este trabalho trata da proteção de redes de
distribuição de energia elétrica contra faltas de alta impedância
(FAI). È proposto uma metodologia para a detecção de FAI
através da detecção do gráu de desequilíbrio das redes elétricas e
da implementação da técnica em religadores e chaves
secionalizadoras.
Palavras-chave – Faltas de alta impedância, proteção, sistemas
de distribuição, detecção de FAI.
I. INTRODUÇÃO
A
s faltas de alta impedância (FAI) são definidas na
literatura como aquelas que geram níveis de corrente
insuficientes para sensibilizar os equipamentos convencionais
de proteção de sobrecorrente.
Dentro do contexto das (FAI), encontram-se vários subtipos,
em superfícies variadas. Por exemplo, o condutor pode romper
e entrar em contato com superfícies como concreto, grama,
areia e asfalto. Ele também pode ficar à deriva, pendurado,
tendo como meio dielétrico o ar. No caso de redes de
distribuição aéreas, as (FAI) ainda podem causar acidentes
graves com pessoas e animais, ou ainda provocar incêndios
(por causa do fenômeno de arco-voltaico, segundo o que
consta em [1]), principalmente nas situações que envolvem
rompimento e posterior queda de condutores energizados de
circuitos com níveis de tensão altos em relação aos que um ser
humano suportaria.
Assim, o presente artigo tenta contribuir para o aumento da
taxa de detecção confiável, deste tipo de falta,
Metodologia Aplicada
A. Teoria dos Desequilíbrios de Corrente
Sabe-se que o desequilíbrio de corrente é caracterizado por
qualquer diferença nas amplitudes ou nas defasagens entre as
três correntes de um sistema trifásico, porque o ideal é que um
sistema apresente as três correntes iguais em módulo e
defasadas de 120° uma das outras (sistema equilibrado).
Assim, segundo Forstecue, um sistema desequilibrado de
correntes (ou de tensões) pode ser decomposto em três
sistemas equilibrados, a saber:
1. Sistema de sequência positiva (fundamental): consiste em
três fasores iguais em módulo, defasados de 120 o, e tendo a
mesma sequência que os fasores originais;
2. Sistema de sequência negativa: consiste em três fasores
iguais em módulo, defasados de 120o, e tendo a sequência da
fase oposta a dos fasores originais;
3. Sistema de sequência zero: constituído de três fasores
iguais em módulo com defasagem de 0o entre si.
Assim, se um sistema possui a sequência de fases “ABC”, as
sequências de fases dos componentes de sequência positiva e
negativa, serão respectivamente “ABC” e “ACB”.
A decomposição de 3 correntes de linha, Ia, Ib e Ic em
componentes simétricas pode ser obtida pela equação (1):
(1)
Nesta equação, Ia0, Ia1 e Ia2 são, respectivamente, as correntes
de sequência zero, positiva e negativa da fase A, e a é o
operador que causa uma rotação de 120 o no sentido antihorário ao fasor que for aplicado. A equação (1) foi
largamente utilizada no desenvolvimento do medidor de
desequilíbrios de corrente proposto neste trabalho, juntamente
com as equações (2) e (3) abaixo. Estas equações introduzem
os indicadores de desequilíbrio α0 e α2, (sendo o primeiro
relativo à presença de componentes de sequência zero em
relação à sequência positiva e o segundo relativo à presença de
componentes de sequência negativa em relação à sequência
positiva).
(2)
(3)
No presente artigo, propõe-se que os dois indicadores acima
sejam implementados, via hardware, na logística de detecção
de FAI, de religadores (equipamentos fartamente usados na
Distribuição de energia elétrica).
B. Desenvolvimento do Medidor de Desequilíbrios de
Corrente
O medidor de desequilíbrio de corrente foi desenvolvido no
programa digital ATP, através da rotina TACS ((Transient
Analysis of Control Systems), a qual foi originalmente
desenvolvida para a simulação das interações dinâmicas entre
sistemas de controle e os componentes das redes elétricas).
Uma vez proposta a técnica de detecção de desequilíbrios
de corrente como fator decisivo para a determinação de uma
FAI, surge uma importante indagação: quais devem ser os
percentuais de ajuste para os dois indicadores (equações (2) e
2
(3)? Esta pergunta é muito importante porque estes ajustes não
devem ser feito aleatoriamente, pois isso pode levar a
aberturas indevidas do circuito, já que, como se sabe, as redes
de distribuição não são perfeitamente equilibradas. Para
responder a esta pergunta crucial, inúmeras condições de
operações típicas de um alimentador tiveram que ser
simuladas, conforme descrito na próxima seção.
(desequilíbrio nulo) e em outras 3 condições de desequilíbrios
entre as fases. Nos estudos, quando se tiver, por exemplo, um
desequilíbrio de 20%, então ter-se-á ΔZ = 0,2 pu. Isso
significará que, em uma fase (fase a), a impedância da carga,
Z, será de 1,0 pu. Na segunda fase, Z=0,8 pu (fase c) e, na
terceira fase, Z=1,2 pu (fase b). A Tabela I mostra os
resultados para os índices de desequilíbrio de sequência zero e
negativa, para as 4 condições de carga estudadas.
II. SIMULAÇÃO DE FAI FASE-TERRA
Para efetuar as simulações que permitirão avaliar os graus
de desequilíbrios encontrados nas redes, adotou-se um
alimentador típico, descrito em [7], e ali denominado de
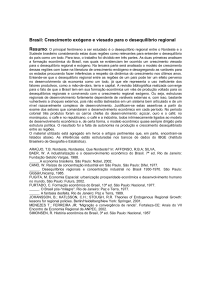
NEO01N4. Abaixo, na Fig. 1, representar-se-á um resumo do
diagrama unifilar original do NEO01N4, a fim de se entender
a representação feita no programa ATP.
E
G
a
b
c
M
F
H
Fig. 1. Esquematização do sistema escolhido.
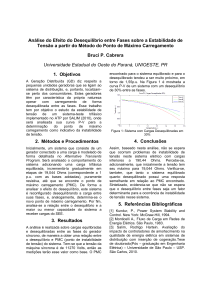
Fig. 2. Caso A.
O que se fez nesse trabalho, através de simulações no ATP,
foi a aplicação de defeitos no sistema acima apresentado,
simultaneamente, ora com cargas equilibradas, ora com cargas
desequilibradas. Em cada caso, mediu-se sempre os dois
índices de desequilíbrio α0 (índice de desequilíbrio de
sequência zero) e α2 (índice de desequilíbrio de sequência
negativa). Assim, soube-se como este dispositivo se
comportaria diante dos defeitos ora estudados, bem como
diante de condições em que o sistema esteja em condição de
operação normal, porém com certas condições de
desequilíbrios, que poderiam ser confundidas com uma FAI.
No presente artigo selecionar-se-ão algumas das simulações
realizadas, a fim de mostrar as mais importantes. São elas:
Caso A – Caso ideal, sem defeitos na rede;
Caso B – Caso em que o condutor se rompe e entra em
contato com uma impedância de falta apenas do lado fonte;
Caso C – Caso em que o condutor se rompe e entra em
contato com uma impedância de falta apenas do lado carga;
Caso D – Caso em que o condutor se rompe e entra em
contato com uma impedância de falta dos dois lados (fonte e
carga);
Caso E – Caso em que o condutor apenas se rompe, não
entrando em contato com nenhuma impedância de falta.
Todos os casos dar-se-ão para uma configuração de cargas
do sistema ligadas em delta, para fins de simulação no
ambiente ATP. Todas as barras do sistema da Fig. 2, exceto a
Barra A, tiveram cargas conectadas.
A. Resultados Caso A (Caso ideal, sem defeitos na rede)
A Fig. 2 mostra o diagrama trifilar para o caso A. Neste
caso, as cargas foram analisadas em uma condição ideal
A configuração de todas as cargas é delta pois, na prática,
os transformadores rebaixadores (13,8kV/220V), dos
alimentadores de distribuição, são conectados em delta, no
nível de tensão de 13,8 kV. Em outras palavras, as cargas,
vistas do lado de 13,8 kV, não possuem aterramento. Assim, à
medida que o desequilíbrio da carga vai aumentado, surgirão
correntes de sequência zero e negativa diferentes entre si em
módulo. E mais, como não há caminho, neste transformador,
para as correntes de sequência zero circularem do lado estrela
aterrado para o lado delta, então, do lado estrela aterrado,
essas correntes serão nulas e o índice de desequilíbrio α0 será
também igual a zero. Daí, na Tabela I, os resultados, para α0,
serão nulos. Já as correntes de sequência negativa circulam.
Logo, os valores dos índices de desequilíbrio α2 são diferentes
de zero (e crescentes com o desequilíbrio da carga).
TABELA I
ÍNDICES DE DESEQUILÍBRIO EM FUNÇÃO DO GRAU DE DESEQUILÍBRIO DO
SISTEMA – CASO A
ΔZ [pu]
0,0
0,1
0,2
0,3
α0 [%]
0
0
0
0
α2 [%]
0
5,39
10,91
16,75
Em seguida serão apresentados os estudos para os casos em
que ocorreu uma FAI.
Os resultados estão nas Figuras 4 a 13. Nestas figuras, os
desequilíbrios aplicados à carga, (ΔZ), estão mostrados nas
ordenadas. Nas abcissas estão os valores das impedâncias de
falta, Zf.
3
Cabe ainda observar que, em todas estas figuras há uma
reta, traçada para o índice de desequilíbrio de 15%. O motivo
disso é que, após todos os estudos realizados, chegou-se à
conclusão que, para este alimentador em particular, poder-seia ajustar o pick-up do detector, para ordenar trip para α0 ou
α2, igual a 15%.
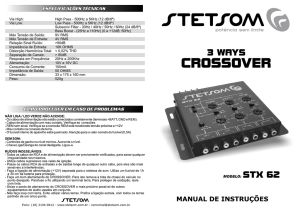
B. Resultados para o Caso B (o condutor se rompe e entra em
contato com uma impedância de falta do lado fonte)
A fase que sofrerá o defeito ora proposto será a fase a do
sistema. A Fig. 4, representada a seguir, mostra o diagrama
trifilar para o caso B.
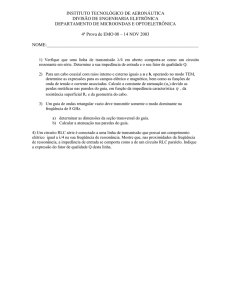
Os resultados, para este caso, estão nas Figuras 4,5, 6 e 7.
Observa-se que, conforme já determinado anteriormente, os
pontos abaixo da curva de 15% (pontos da curva azul – α0 –
nas figuras 4, 5, 6 e 7) merecem atenção, mas não implicam
em ausência de detecção pelo dispositivo, uma vez que a
detecção também depende do valor do outro índice (α2). E os
resultados obtidos para este índice são valores bem aceitáveis
(acima de 15%), de acordo com os resultados mostrados nas
figuras 4, 5, 6 e 7.
E
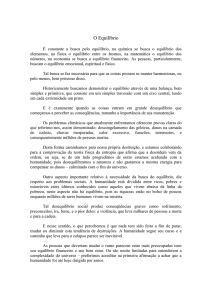
Fig. 4. Comportamento dos índices de desequilíbrios α0 e α2 em função da
impedância de falta (Zf) em OHMS, estando as cargas do sistema totalmente
equilibradas (ΔZ=0,0 pu).
Fig. 5. Comportamento dos índices de desequilíbrios α0 e α2 em função da
impedância de falta (Zf) em OHMS, estando as cargas do sistema com 10%
de desequilíbrio (ΔZ=0,1 pu).
G
a
Fig. 6. Comportamento dos índices de desequilíbrios α0 e α2 em função da
impedância de falta (Zf) estando as cargas do sistema com 20% de
desequilíbrio (ΔZ=0,2 pu).
b
c
F
M
H
Zf
Fig. 3 Caso B.
Nestas figuras também pode ser observado que,
diferentemente do caso A, à medida que as cargas aumentam
seus graus de desequilíbrio (isto é, conforme se muda de
figura), os índices α0 e α2 variam muito pouco, permanecendo
praticamente constantes. Isso significa que os índices de
desequilíbrios são muito mais sensíveis à variação da
impedância de falta (Zf) em OHMS, do que à variação dos
desequilíbrios das cargas.
Fig. 7. Comportamento dos índices de desequilíbrios α0 e α2 em função da
impedância de falta (Zf) em OHMS, estando as cargas do sistema com 30%
de desequilíbrio (ΔZ=0,3 pu).
C. Resultados para o Caso C (o condutor se rompe e entra
em contato com uma impedância de falta do lado da carga)
A Fig. 8, representada a seguir, mostra o diagrama trifilar
para o caso C.
4
G
E
a
b
c
F
M
M
H
Fig. 11. Comportamento dos índices de desequilíbrios α0 e α2 em função da
impedância de falta (Zf) em OHMS, estando as cargas do sistema com 20%
de desequilíbrio (ΔZ=0,2 pu).
Zf
Fig. 8. Caso C.
Para a situação de falta fase-terra na fase a, têm-se os
resultados nos gráficos das figuras 9, 10, 11 e 12.
A partir da análise dos gráficos, nota-se que, praticamente,
todos os valores para αo estão abaixo do limite de 15%. No
entanto, como o sistema detector depende também da outra
variável, α2, e os valores desta estão bem acima deste limite,
então a FAI poderá ser detectada.
Fig. 12. Comportamento dos índices de desequilíbrios α0 e α2 em função da
impedância de falta (Zf) em OHMS, estando as cargas do sistema com 30%
de desequilíbrio (ΔZ=0,3 pu).
D. Resultados Caso D (o condutor se rompe e entra em
contato com uma impedância de falta dos dois lados (fonte e
carga)
A Fig. 13, representada a seguir, mostra o diagrama trifilar
para o caso D.
E
a
Fig. 9. Comportamento dos índices de desequilíbrios α0 e α2 em função da
impedância de falta (Zf) em OHMS, estando as cargas do sistema totalmente
equilibradas (ΔZ=0,0 pu).
G
b
c
F
M
M
H
Zf
Fig. 10. Comportamento dos índices de desequilíbrios α0 e α2 em função da
impedância de falta (Zf) em OHMS, estando as cargas do sistema 10% de
desequilíbrio (ΔZ=0,1 pu).
Zf
Fig. 13. Caso D.
Nos gráficos das Fig. 14, 15, 16 e 17 encontram-se os
resultados para a falta fase terra, ou seja, quando o defeito
ocorre na fase A do sistema. A fase escolhida foi, como um
padrão para todos os casos, a fase a.
Faz-se necessário aqui observar algo curioso: à medida que
se aumenta o grau de desequilíbrio do sistema para uma
mesma impedância de falta, o índice de desequilíbrio α0
diminui, enquanto o índice α2 aumenta (o esperado é sempre
5
aumentar, uma vez que se está acrescentando desequilíbrio à
rede). Isso ocorre para todos os valores de impedâncias de
falta, exceto para a impedância igual a zero.
Da mesma forma que nos casos anteriores, os pontos abaixo
da reta limite não necessitam do dispêndio de grande atenção,
já que o dispositivo proposto para detectar as FAI se utilizará
dos dois índices para a detecção do defeito e, em qualquer das
figuras abaixo, relacionadas com este sub-caso, sempre um dos
dois índices estará acima de 15%.
Fig. 14. Comportamento dos índices de desequilíbrios α0 e α2 em função da
impedância de falta (Zf) em OHMS, estando as cargas do sistema totalmente
equilibradas (ΔZ=0,0 pu).
Fig. 17. Comportamento dos índices de desequilíbrios α0 e α2 em função da
impedância de falta (Zf) em OHMS, estando as cargas do sistema com 30%
de desequilíbrio (ΔZ=0,3 pu).
E. Resultados Caso E (o condutor apenas se rompe, não
entrando em contato com nenhuma impedância de falta)
A Fig. 18, representada a seguir, mostra o diagrama trifilar
para o caso E. Ressalta-se que, neste caso, a fase a do sistema
sofrerá o defeito, sendo aberta indevidamente, ou sofrendo um
rompimento sem contato dos condutores com uma impedância
de falta. As outras duas fases permanecerão em pleno
funcionamento.
Segundo a tabela II, é comum, também a este caso, a
ausência de maiores complicações no que se refere à detecção
do defeito. Pela tabela II nota-se que o índice α0 não é capaz
de detectar o defeito (conforme já explicado antes, os valores
nulos para α0 se devem ao fato de não existir caminho para as
correntes de sequência zero, anulando-se também os
indicadores de desequilíbrio). Porém, o índice α2 certamente
fará a detecção da falta, pois os resultados encontrados foram
bem acima do limite estipulado. Assim, o dispositivo baseado
nesses dois índices detectaria, ainda com folga, esse tipo de
defeito indesejado presente em alguns sistemas.
E
a
G
b
c
Fig. 15. Comportamento dos índices de desequilíbrios α0 e α2 em função da
impedância de falta (Zf) em OHMS, estando as cargas do sistema com 10%
de desequilíbrio (ΔZ=0,1 pu).
M
F
H
Fig. 18. Caso D.
Fig. 16. Comportamento dos índices de desequilíbrios α0 e α2 em função da
impedância de falta (Zf) em OHMS, estando as cargas do sistema com 20%
de desequilíbrio (ΔZ=0,2 pu).
TABELA II
ÍNDICES DE DESEQUILÍBRIO EM FUNÇÃO DO GRAU DE DESEQUILÍBRIO DO
SISTEMA –CASO E
ΔZ [pu]
I [A]
α0 [%]
α2 [%]
0,0
12,29
0,0
83,0
0,1
12,45
0,0
83,0
0,2
12,92
0,0
82,6
0,3
13,73
0,0
81,9
Diante de todos os estudos realizados, chegou-se à
conclusão que, para este alimentador em particular, poder-se-á
ajustar o pick-up do detector, para ordenar trip sempre que α0
ou α2, sejam iguais ou superiores a 15%.
III. COMENTÁRIOS E CONCLUSÕES
Partindo-se do fato de que acidentes continuam a ocorrer
6
nas concessionárias de distribuição de energia elétrica, o
objetivo primeiro deste trabalho, assim como de qualquer
outro relacionado aos métodos de detecção de faltas de alta
impedância, é contribuir para a mitigação, ainda que parcial,
desses problemas.
O limiar de atuação, dos indicadores de desequilíbrio α0 e
α2, propostos para o alimentador analisado neste artigo para
15%, não devem ser encarados como definitivos. Par maior
confiabilidade, sugere-se que, para cada alimentador, seja feita
uma análise prévia sobre seu gráu de desequilíbrio apenas com
cargas. Desta forma, espera-se que, para alimentadores
urbanos, o limiar de atuação possa até ser maior do que 15%,
enquanto que, para alimentadores rurais, onde maiores
desequilíbrios de carga possam existir, este limiar
provavelmente deverá ser maior do que 15%. A necessidade
de se analisar o gráu de desequilíbrio devido a prováveis
cargas desequilibradas não deve ser encarada como um ponto
negativo da metodologia. Mesmo os tradicionais métodos de
detecção de faltas, através de relés, fusíveis ou religadores
requerem que um estudo de curto-circuito personalizado para
cada alimentador seja feito.
Com relação aos indicadores de detecção de desequilíbrios
adotados, α0 e α2, apesar de, na maioria dos casos analisados,
apenas α2 ter sido capaz de detectar a FAI, deve-se afirmar
aqui que ambos são confiáveis e indispensáveis, pois na
maioria dos casos analisados, para Zf em torno de 100 OHMS,
foi apenas o indicador α0 que se mostrou acima de 15%
Além de aumentar as chances de proteção contra faltas de
alta impedância, a técnica ora apresentada tem como grande
vantagem o fato de ser facilmente possível de ser
implementada, inclusive, em dispositivos menos dispendiosos,
como religadores.
Assim, como esses dispositivos estão presentes em grande
número na rede elétrica e, consequentemente, estarão mais
próximos das FAI, o monitoramento fica baseado em muito
mais pontos do que se realizado somente por relés e com
muito mais sensibilidade para a detecção das FAI do que estes
(que somente são alocados no início dos alimentadores, nas
Subestações).
Finalmente, a técnica apresentada pode parecer, para
alguns, disprovida de confiabilidade e de sensibilidade
adequada para a atuação dos dispositivos de proteção em casos
de FAI. Porém, quando se compara esta alternativa com o que
se tem disponível para a detecção de curtos fase-terra na área
de Distribuição de Energia (fusíveis e relés ajustados para
enxergarem apenas grandes sobrecorrentes e nunca FAI) há
que se perguntar: devemos deixar como está atualmente ou
deveríamos introduzir um detector que possa salvar pelo
menos uma vida (mesmo que, eventualmente, este detector
ordene a abertura de um religador e, de fato, não haja uma FAI
mas, sim, um grande desequilibrio da rede)?
Pode-se enumerar pelo menos cinco vantagens da presente
proposta:
1) Redução de riscos causados pela ocorrência das faltas ora
estudadas;
2) Técnica de detecção relativamente simples;
3) Consequente aumento do monitoramento da rede para
esse determinado tipo de falta;
4) Custo financeiro relativamente mais baixo;
5) Ganho em segurança populacional com manutenção dos
níveis mínimos de eficiência do sistema de energia requeridos
pelos usuários do mesmo.
IV. REFERENCES
[1]
[2]
[3]
[4]
[5]
[6]
[7]
Aucoin, M., Status of High Impedance Fault Detection, IEEE
Transactions on Power Apparatus and Systems, col. PAS-104, nº. 3,
Março 1985.
E. E. Baker, A utility perspective of high impedance fault detectors,
IEEE Transactions Antennas Propagation, Setembro 1996.
B. Don Russel, Balancing security versus sensitivity – The challenge
for high impedance fault detection technology, Texas A&M University,
Setembro 1996.
Ebron, S., Lubkeman, D. L., White, M., A Neural Network Approach To
The Detection Of Incipient Faults On Power Distribution Feeders,
IEEE Transactions on Power Delivery, vol. 5, nº. 2, Abril 1990.
Figueiredo, R. G., Filho, O. O., Chagas, F. A., Nova, I. F., Santos, L. E.
D., Medições, Estudos e Ensaios para Avaliação e Projeto de Proteção
para Falhas Fase-Terra em Sistemas com Alta Impedância de Contato,
COELCE e CEPEL, 2002.
Oliveira Jr, D. A., Faltas de alta impedância: Detecção e localização
de rompimento de condutores em circuito primário de redes aéreas de
distribuição baseado em desequilíbrio de tensão, Dissertação de
Mestrado, 176 p., CPDEE / Universidade Federal de Minas Gerais, Belo
Horizonte – MG, Maio 2006.
Almeida, M. A. D., Um algoritmo para Estimação de Estado em
Alimentadores de Distribuição de Energia Elétrica com Base no
Método da Soma de Potências, Tese de Doutorado, 153 p., Centro de
Tecnologia / Universidade Federal do Rio Grande do Norte, Natal – RN,
Dezembro 2003..
V. BIOGRAPHIES
Daniela de Oliveira Farina é formada (em 2009)
pela Faculdade de Engenharia Elétrica da
Universidade Federal de Uberlândia (MG). Em
agosto de 2009 ingressou no Programa de PósGraduação da Faculdade de Engenharia Elétrica
da UFU, tendo obtido o título de Mestre em
Ciências, em março de 2012.
Dr. José Wilson Resende (Ph.D), é graduado em
Engenharia Elétrica em 1975) pela Faculdade de
Engenharia Elétrica da Universidade Federal de
Uberlândia (MG). Em 1979 concluiu o curso de
mestrado pela Universidade Federal de Itajubá (MG).
Sua dissertação de mestrado (sob orientação do Prof.
Rubens D. Fuchs) trata de compensação reativa série
e em derivação em linhas de transmissão. Em 1986
recebeu o título de Ph.D. pela University of Aberdeen,
Escócia. Sua tese de doutorado (sob a orientação do
Prof. Robert Yacamini) é sobre análise harmônica de reatores controlados a
tiristores em condições não ideais. É contratado como professor da
Faculdade de Engenharia Elétrica da Universidade Federal de Uberlândia
desde 1976, sendo professor titular desde 1986. Nesta universidade, ele
trabalha também como pesquisador pertencente ao Núcleo de Qualidade e
Racionalização de Energia. Suas principais áreas de interesse são: Análise
harmônica de redes elétricas, Compensação reativa de sistemas elétricos e
Proteção de sistemas elétricos.