Geometria Analı́tica e Cálculo Vetorial - Aula 13
Alex Abreu
Conteúdo
1 Elipse parametrizada
1
2 Retas tangentes a elipse
1
3 Hipérbole parametrizada
3
4 Parábola parametrizada
3
5 Exercı́cios
3
1
Elipse parametrizada
2
2
Já vimos que a elipse de equação xa2 + yb2 = 1 é imagem do cı́rculo unitário via a transformação
linear T : R2 → R2 definida por T (x′ , y ′ ) = (ax′ , by ′ ) (para evitar confusão, estaremos usando as
coordenadas x′ e y ′ para o primeiro R2 ). Então, via essa transformação, vale que x = ax′ e y = by ′ .
Também sabemos que o cı́rculo pode ser parametrizado via c : R → R2 dada por c(t) =
(cos(t), sen(t)), ou seja, o cı́rculo é a imagem da função c. Logo, a elipse é a imagem da função
composta T ◦ c : R → R2 . Mas é fácil calcular a função composta T ◦ c = (a cos(t), b sen(t)).
2
2
Portanto a elipse de equação xa2 + yb2 = 1 é parametrizada pela função e : R → R2 definida por
e(t) := (a cos(t), b sen(t)).
Como será útil mais para frente, vemos que a função velocidade é dada por e′ (t) = (−a sen(t), b cos(t)),
e portanto a reta tangente no ponto P0 = e(t0 ) é dada por l := {P |P = P0 +se′ (t0 ), s ∈ R}, ou mais
explicitamente pelas equações paramétricas x = a cos(t0 ) − sa sen(t0 ) e y = b sen(t0 ) + sb cos(t0 ).
2
Retas tangentes a elipse
Usaremos agora a transformação linear T para obter equações mais simples para a reta tangente.
Fica para o leitor verificar que a imagem da reta tangente a uma curva c no instante t0 via uma
transformação linear T é a reta tangente no instante t0 a curva T ◦ c (de fato é só verificar que
(T ◦ c(t))′ = T (c′ (t))). Logo, para entendermos a reta tangente a uma elipse basta entender a reta
tangente ao cı́rculo unitário.
Seja um ponto P0′ = (x′0 , y0′ ) no cı́rculo unitário. Para calcular sua reta tangente tP0′ , basta
usarmos nossos conhecimentos de geometria elementar. Sabemos que a reta tP0′ é perpendicular ao
raio OP0′ , logo perpendicular ao vetor P0′ − O = (x′0 , y0′ ) e passa pelo ponto P0′ = (x′0 , y0′ ). Logo
tP0′
b
b
P0′
O
sabemos que um ponto P ′ = (x′ , y ′ ) pertence a tP0′ se e somente se ele satisfaz hP0′ , P i = hP0′ , P0′ i,
ou seja a equação da reta é
x′0 x′ + y0′ y ′ = 1.
1
Vamos agora usar essa equação para descobrir a equação da reta tangente tP0 a elipse no ponto
P0 = (x0 , y0 ) = T (P0′ ). Para isso basta descobrir a image da reta tP0′ . Seja agora um ponto
P (x, y) = T (P ′ ) onde P ′ = (x′ , y ′ ) ∈ tP0′ . Então sabemos que x′ e y ′ satisfazem a equação acima,
mas por outro lado temos que x = ax′ e y = by ′ . Portanto, x e y satisfazem a equação
x′0
x
y
+ y0′ = 1,
a
a
Entretanto sabemos que x0 = ax′0 e y0 = by0′ , logo ficamos com a equação
x0 x y0 y
+ 2 = 1.
a2
b
Vamos agora verificar que essa equação coincide com a equação da seção anterior. Temos então
que x0 = a cos(t0 ) e y0 = b sen(t0 ), enquanto que x = a cos(t0 )−sa sen(t0 ) e y = b sen(t0 )+sb cos(t0 ),
basta então vermos que
(a cos(t0 ))(a cos(t0 ) − sa sen(t0 )) (b sen(t0 ))(b sen(t0 ) + sb cos(t0 ))
+
a2
b2
2
2
cos (t0 ) − s cos(t0 ) sen(t0 ) + sen (t0 ) + s sen(t0 ) cos(t0 )
= 1
cos2 (t0 ) + sen2 (t0 )
1
= 1
= 1
= 1
Logo, as duas equações, de fato, são a mesma.
b
P0
b
F1
F2
b
Daremos agora uma aproximação um pouco mais geométrica. Sabemos que a elipse é o lugar
geométrico dos pontos no plano que satsfazem P F1 + P F2 = 2a. Logo, os pontos que estão no
interior da elipse, satisfazem P F1 + P F2 < 2a e os pontos que estão no exterior da elipse satsfazem
P F1 + P F2 > 2a.
Seja agora tP0 a reta tangente no ponto P0 pertencente a elipse. Então, como todos os pontos
P (diferentes de P0 ) da reta tP0 estão fora da elipse eles satisfazem P F1 + P F2 > 2a e portanto o
ponto P0 é o ponto na reta tP0 que minimiza a soma P F1 + P F2 .
b
F2′
r
b
P
b
P0
b
b
F1
F2
Agora, vamos modificar um pouco o problema, dados dois pontos F1 e F2 no mesmo lado de
uma reta r, como achar o ponto P0 em r que minimiza a soma P F1 + P F2 . Seja então F2′ a reflexão
de F2 com relação a reta r. Então, claramente vale que para qualquer ponto P na reta, temos que
P F2 = P F2′ , logo o problema vira achar o ponto na reta que minimiza P F1 + P F2′ , e isso é fácil
2
uma vez que a menor distância entre dois pontos é sempre uma reta. Ou seja, pela desiqualdade
triangular nos temos que
P F1 + P F2′ ≥ F1 F2′ ,
e o ponto P0 que é a interseção da reta r com F1 F2′ atinge a igualdade acima, logo ele é o ponto
que minimiza a soma.
Disso tudo, nos vemos que como F1 , P0 e F2′ são colineares então os ângulos agudos que F2′ P0 e
F1 P0 formam com a reta r são iguais. E portanto os ângulos que F2 P0 e F1 P0 formam com r são
iguais.
Concluı́mos portanto que a reta tangente a elipse no ponto P0 é a reta que forma ângulo iguais
(bissetriz externa) com os raios focais F1 P0 e F2 P0 .
3
Hipérbole parametrizada
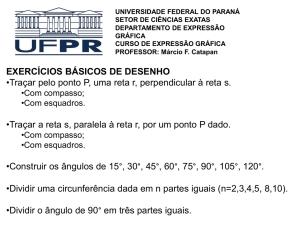
Como antes, para parametrizar a hipérbole, basta parametrizarmos a hipérbole equilátera x2 − y 2 =
1. Para isso introduziremos as funções seno hiperbólico e cosseno hiperbólico.
Definimos o seno hiperbólico
eθ − e−θ
senh(θ) :=
2
e o cosseno hiperbólico por
eθ + e−θ
cosh(θ) :=
.
2
Donde tiramos as equações
cosh2 (θ) − senh2 (θ)
cosh′
= 1
= senh
senh′
= cosh .
Logo, um ramo da hipérbole equilátera é parametrizado por c1 : R → R2 definida por c1 (t) =
(cosh(t), senh(t)), enquanto que o outro é parametrizado por c2 : R → R2 definida por c2 (t) =
(− cosh(t), senh(t)).
2
2
Seguindo argumentos semelhantes ao da elipse, a hipérbole de equação xa2 − yb2 = 1 é parametrizada
por h1 (t) = (a cosh(t), b senh(t)) e h2 = (−a cosh(t), b senh(t)). Donde a função velocidade é
dada por h′1 (t) = (a senh(t), b cosh(t)), logo a reta tangente a hipérbole no ponto P0 = h1 (t0 ) é
dada por tP0 = {P |P = P0 + sh′1 (t0 ), s ∈ R}, ou pelas equações x = a cosh(t0 ) + sa senh(t0 ) e
y = b senh(t0 ) + sb cosh(t0 ).
Como antes, escrevendo P0 = (x0 , y0 ), e usando as equações paramétricas acima, uma outra
equação para reta tangente é
x0 x y0 y
− 2 = 1.
a2
b
E também nesse caso vai valer que a reta tangente forma ângulos iguais com os raios focais P F1 e
P F2 .
4
Parábola parametrizada
A parábola é a mais fácil de ser parametrizada. Como sua equação é da forma x2 = 4py, ou
2
t2
seja, y = x4p , podemos parametrizá-la simplesmente por c : R → R2 onde c(t) = (t, 4p
). a função
t
′
velocidade então é c (t) = (1, 2p ) e portanto a reta tangente no ponto P0 = c(t0 ) é dada por
2
t
st
tP0 = {P |P = P0 + sc′ (t0 ), s ∈ R}, ou pelas equações x = t0 + s e y = 4p
+ 2p
.
Como antes, se P0 = (x0 , y0 ), então uma equação para a reta tangente é
x0 x = 2p(y + y0 ).
E também vale que a reta tangente é a bissetriz do raio focal com a perpendicular pelo ponto P0 a
diretriz.
5
Exercı́cios
1. Verifique que os vetores velocidades acima de fato fazem ângulos iguais com os vetores P0 − F1
e F2 − P0 .
3