Capítulos 4 e 5 – Leis de Newton e suas
Aplicações
• Até agora, cinemática: estudo do movimento sem se preocupar
com suas causas
• O estudo das causas do movimento é a Dinâmica
• Princípios da Dinâmica foram sintetizados por Isaac Newton em
sua obra Philosophiae Naturalis Principia Mathematica (”Princípios
Matemáticos da Filosofia Natural”)
Sir Isaac Newton (1643-1727)
Os anos “miraculosos” da peste
“No início do ano de 1665, eu descobri o
método das séries aproximadas e a regra
para reduzir qualquer potência de
qualquer binômio. No mesmo ano, em
maio, eu descobri o método das tangentes
de Gregory & Slusius, e, em novembro,
alcancei o método direto das fluxões, e,
no ano, seguinte, em janeiro, a teoria das
cores, e, no maio seguinte, desvendei o
método inverso das fluxões, e, no mesmo ano, eu comecei a pensar na gravidade
como se estendendo até a órbita da Lua, e, a partir da regra de Kepler, de que os
períodos dos planetas estão numa proporção sesquiáltera com suas distâncias do
centro de suas órbitas, eu deduzi que as forças que mantêm os planetas em
órbitas devem ser inversamente proporcionais ao quadrado de sua distância do
centro em torno do qual eles giram: e, a partir disso, eu comparei a força
necessária para manter a Lua em sua órbita com a força da gravidade na superfície
da Terra, e, eu descobri que elas se correspondem bem de perto. Tudo isso
aconteceu nos dois anos da peste, 1665-1666. Pois, nessa época, eu estava no
auge de minha fase de invenção e interessava-me mais pela matemática e pela
filosofia do que em qualquer ocasião posterior.”
Precursores
Tycho Brahe
(1546-1601)
Johanes Kepler
(1571-1630)
Isaac Newton (1642-1727)
“Se vi mais longe, foi porque estava
sobre os ombros de gigantes”
Galileu Galilei
(1564-1642)
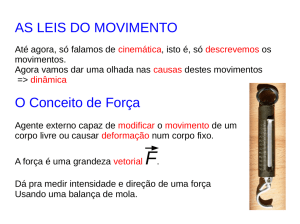
4.1 – Força e interações
5.5 – As forças fundamentais da natureza
• Forças são as causas das modificações no movimento
• Noção intuitiva de força (“puxar” ou “empurrar”)
• Forças surgem da interação entre objetos e partículas
Quantas interações distintas existem?
Interações fundamentais da natureza
Gravitacional:
física “da Terra” e “dos céus”
Eletrofraca (anos 60)
GUT (Teorias da Grande Unificação)?
Unificação das forças
Eletromagnética:
eletricidade, magnetismo, luz
Nuclear fraca:
decaimento beta
(neutron -> próton + elétron +
antineutrino)
Nuclear forte:
estabilidade dos núcleos atômico
Classificação Geral das Forças (para Física I...)
Forças de contato: normal, de atrito, tensão numa corda...
Na verdade, são diferentes manifestações da interação
eletromagnética... Afinal, o que é “contato”?
AFM (microscópio de força atômica)
Forças de longo alcance: gravitacional, Lei de Coulomb, etc.
Como medir forças? Dinamômetro
dinamômetro
∆x
F
2∆x
−∆x
-F
2F
Forças são grandezas vetoriais
Superposição
F3
R = F1 + F2
Rx = F1x + F2 x
R y = F1 y + F2 y
F2
R
F2
Decomposição
F1
F1
Força
resultante
F3
R = F1 + F2 + F3 = ∑ F
4.2 – Primeira lei de Newton
Aristóteles: força constante para velocidade constante
Galileu: Princípio da Inércia
h
h
h
1a. Lei de Newton (Lei da Inércia): quando a força resultante sobre
um corpo é zero, ele permanece em repouso ou se move com
velocidade constante (aceleração nula)
A primeira lei não é válida em
referenciais acelerados:
Exemplo: pessoa deslizando de patins
dentro de um trem acelerado:
Os referenciais onde a 1a. Lei é
válida são conhecidos como
referenciais inerciais
Como conseqüência, todo
referencial que se move com
velocidade constante em relação
a um referencial inercial é
também um referencial inercial
A Terra é um referencial inercial?
Aceleração de um objeto sobre a linha do Equador:
arad
v2
=
R
R = 6378 km
2πR
v=
= 464 m/s
24h
arad = 0,0034 g
A Terra não é um referencial inercial, mas pode ser aproximada como
tal se as acelerações em questão forem muito maiores que a
aceleração centrípeta
Vídeo: “Physics Demonstrations in Mechanics” II.1
4.3 – Segunda lei de Newton
Um corpo sob a ação de uma força resultante não nula
sofre uma aceleração
Para um determinado
corpo, dobrando-se a
força dobra-se a
aceleração:
a2 F2
=
a1 F1
A aceleração é proporcional
à força
Para uma determinada
força, dobrando-se a
quantidade de matéria do
corpo, sua aceleração cai
pela metade:
a1 m2
=
a2 m1
A aceleração é inversamente
proporcional à massa
(quantidade
de matéria do corpo)
2a. Lei de Newton: quando a força resultante externa atua sobre
um corpo, ele se acelera. A aceleração resultante possui a mesma
direção e o mesmo sentido da força resultante. O vetor força
resultante é igual ao produto da massa do corpo pelo vetor
aceleração do corpo.
∑ F = ma
Unidade S.I. de força: newton (N) = kg.m/s2
•
Equação fundamental da Mecânica
•
Vale apenas se a massa do objeto é constante
•
Vale apenas em referenciais inerciais
•
Limites de validade: velocidades muito mais baixas que a da
luz e partículas “não muito leves”
4.4 – Massa e peso
∑ F = ma
• Massa como medida da inércia (capacidade de resistir a tentativas
de variações de velocidade): massa inercial
• Mede a quantidade de matéria de um objeto
Peso: força de atração gravitacional exercida pela Terra
sobre um corpo
P = mg : define a massa gravitacional
Experiências mostram a equivalência entre
massa inercial e massa gravitacional com
precisão maior que uma parte em 1012
4.5 – Terceira lei de Newton
Forças resultam da interação mútua entre corpos: “quando um corpo
A exerce uma força sobre um corpo B (“ação”), então o corpo B
exerce uma força sobre o corpo A (“reação”). Essas duas forças têm o
mesmo módulo e a mesma direção, mas possuem sentido contrários.”
Essas duas forças atuam em corpos diferentes!
FA em B = − FB em A
Exemplo: de quanto a Terra “sobe” quando uma massa de 1kg cai
de uma altura de 100m?
Tempo de queda:
mg
− mg
1 2
h = gt ⇒ t =
2
2h
200 m
=
= 4,5 s
2
g
9,8 m/s
Aceleração da Terra:
mg
mg = M T aT ⇒ aT =
MT
M T = 6,02 × 10 24 kg
aT = 1,63 ×10 − 24 m/s 2
1
∆yT = aT t 2 = 1,7 × 10 − 23 m!!!
2
Vídeo: “Physics Demonstrations in Mechanics” II.3
4.6 – Diagramas do corpo livre
Técnica essencial para resolução dos problemas de dinâmica:
1. Isolar os corpos relevantes
2. Desenhar em cada corpo, “livre” de sua vizinhança, todas as
forças que atuam sobre ele
3. Lembre-se: forças
do par ação e reação atuam sobre corpos
distintos e ma não é uma das forças.
Diagrama de corpo
livre para o carro
Exemplo:
Diagrama de corpo
livre para o balde
Carro
Balde
Vídeos: “Physics Demonstrations in Mechanics” IV.2, IV.6
5.1 – Uso da primeira lei de Newton: partículas
em equilíbrio
Exemplos: Y&F 5.2, 5.3 e 5.5
5.2 – Uso da segunda lei de Newton: dinâmica
das partículas
Exemplo: Y&F 5.9 (peso aparente)
Peso aparente:
N = m( g + a y )
Vôos parabólicos: (peso aparente zero)
ay = −g
5.3 – Forças de atrito
Força de atrito cinético:
•
Tangencial à superfície
•
Sentido oposto ao movimento relativo entre as duas superfícies
•
Módulo proporcional à força normal (Lei de Amontons): não
depende da área de contato!
N
f c = µc N
Coeficiente de
atrito cinético
v
fc
Força de atrito estático:
• Atua quando não há movimento relativo entre as duas superfícies
• Sentido oposto à “tendência ao movimento” (o que em alguns casos
pode não ser trivial de se identificar)
• Módulo variável: obtido de modo a cancelar todas as demais forças
tangenciais e manter o sistema em equilíbrio
• Módulo máximo: f s ≤ f s , max = µ s N
Coeficiente de
atrito estático
µ s > µc
Força necessária para iniciar o movimento é maior do
que aquela necessária para mantê-lo com velocidade
constante
Medindo o coeficiente de atrito estático: plano inclinado com ângulo
variável
y
Aumenta-se o ângulo de inclinação até
o bloco começar a se mover. No limiar
do movimento, temos:
P = −mg senθ
x
f s = f s ,max = µ s N
fs
x
Py = −mg cos θ
Decompondo-se as forças:
Equilíbrio:
∑ Fx = 0
∑ Fy = 0
µ s N − mg senθ = 0
⇒ µ s mg cos θ − mg senθ = 0
N − mg cos θ = 0
µ s = tgθ
Resistência de um fluido e velocidade terminal:
Vídeo: “Physics Demonstrations in Mechanics” II.4
Força de resistência:
• Sentido contrário ao da velocidade do
objeto em relação ao fluido
• Módulo:
f ≈ kv (baixas velocidades)
2
f
Dv
≈
(altas velocidades)
Vamos supor que estamos sempre no regime de baixas velocidades.
Pela 2a. Lei de Newton:
∑F
y
= mg − kv y = ma y
Quando o sistema atingir a velocidade terminal, a aceleração será
nula, de modo que:
mg
⇒ vt =
k
mg − kvt = 0
(velocidade terminal)
Solução para todo t :
mg − kv y = ma y = m
m
Usando: vt =
mg
k
dv y
dt
dv y
dt
= mg − kv y
dv y
k
= − dt
v y − vt
m
t
dv′y
k
∫0 v′y − vt = − m ∫0 dt ′
vy
Integrando:
⇒ ln
vt − v y
vt
=−
k
t
m
[
v y = vt 1 − e
− ( k m )t
]
5.4 – Dinâmica do movimento circular
No movimento circular uniforme, a força
resultante sobre uma partícula de massa
m é também centrípeta e tem módulo
igual a:
v2
∑F = m R
Exemplos: Y&F 5.21, 5.23
Próximas aulas:
6a. Feira 02/09: Aula de Exercícios (sala A-327)
6a. Feira 09/09: Aula de Exercícios (sala A-327)
4a. Feira 14/09: Aula Magna (sala A-343) e teste dos Caps. 4 e 5