Capítulo 6 – Movimento Oscilatorio
Harmonico
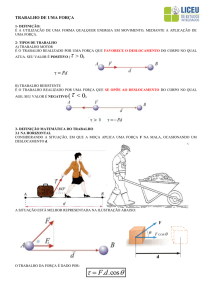
1. O Movimento Harmónico Simples
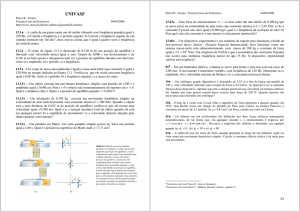
Vamos estudar o movimento de um corpo sujeito a uma força elástica.
Consideramos o sistema como constituído por um corpo de massa m, ligado a
uma mola em hélice (com massa desprezável), que se pode deslocar num plano
horizontal, sem atrito, Fig. 1.
Figura 1. Diagrama das forças exercidas num corpo assente num plano horizontal, sem atrito, ligado a
uma mola em hélice.
As forças exercidas no corpo são a força elástica da mola, ⃗ , (que tem a
direcção da horizontal), o peso, ⃗⃗ e a força exercida pelo plano e normal a este,
⃗⃗ . Estas duas últimas forças têm ambas a direcção vertical e anulam-se
mutuamente porque a aceleração do copo não possui componente vertical.
Consequentemente, a única força de interacção entre os componentes do sistema
é a força elástica. Atendendo a que apenas o corpo tem massa, só este último
pode ter energia cinética. A força elástica é conservativa, como sabemos, tendo
associada a ela a energia potencial elástica. A energia mecânica do corpo é
constante e é a soma da energia cinética mais a energia potencial elástica.
A expressão matemática da força elástica é dada pela lei de Hooke:
1
(1)
em que
é a coordenada de posição do corpo e k é a constante da mola1. Desta
expressão concluímos que a força é nula para x = 0, que é a posição de equilíbrio
do sistema, sendo positiva (isto é, com o sentido que tomámos como positivo do
eixo dos ) quando
e negativa quando (isto é, com o sentido que tomámos
como negativo do eixo dos ) quando
.
O movimento de um corpo sujeito a uma força elástica com estas características
denomina-se movimento oscilatório harmónico simples (MOHS). A expressão
matemática da energia potencial elástica 2 é
(2)
em que escolhemos como ponto de referência3 o ponto de coordenada
(isto
é o ponto em que
A figura 2 apresenta o gráfico (A) da energia potencial elástica, Eq. (2), do
sistema constituído pelo corpo de massa m e pela constante da mola k. Para
qualquer valor da coordenada de posição, x, a soma da energia cinética mais a
energia potencial do sistema é constante e igual à energia mecânica do sistema
(representada no gráfico por uma linha horizontal). Na mesma figura encontra-se
1
O valor da constante da mola, k, é tanto maior quanto maior for a “rigidez” da mola.
Como vimos no capítulo 6, nos sistemas unidimensionais, a relação entre a força conservativa, ( , e
a energia potencial associada, , é
.
3
Recordemos que a energia potencial é definida a menos de uma constante, ou seja, a expressão
matemática mais geral para a energia potencial elástica seria
, em que K é uma
constante arbitrária. Na expressão (2) escolhemos (e podemos fazê-lo porque a constante é “arbitrária”)
K = 0.
2
2
o gráfico (B) da força elástica, Eq. (1), em função da coordenada de posição x.
Na parte inferior encontra-se um diagrama (C) com uma representação do vector
força elástica para seis posições ao longo do eixo do movimento.
Figura 2. (A) Gráfico da energia potencial elástica do sistema constituído pelo corpo de massa m e pela
constante da mola k, em função da coordenada de posição x; (B) o gráfico da força elástica em função da
mesma coordenada de posição; (C) representação do vector força elástica para seis posições ao longo do
eixo do movimento.
A conservação da energia mecânica do sistema permite-nos fazer a seguinte
análise:
No instante
, o corpo está em repouso4 na posição
. Nesse ponto
ele está sujeito à força elástica, que tem sentido positivo e consequentemente tem
aceleração positiva. A energia potencial elástica neste ponto é igual à energia
mecânica, isto é,
(
(3)
porque a energia cinética nesse ponto é nula.
4
Podemos supor, por exemplo, que deslocámos o corpo, utilizando uma força exterior, até à posição
, comprimindo a mola e, no instante
largamos o corpo a partir do repouso.
3
O corpo vai, então, deslocar-se no sentido positivo do eixo dos x, aumentando o
módulo da velocidade 5 , ainda que não uniformemente, até o corpo atingir a
posição x = 0. Neste ponto, a força é nula, como se conclui da Eq. (1) e,
consequentemente, a aceleração do corpo também é nula. No entanto, o corpo
continua a mover-se no mesmo sentido, devido à velocidade que tinha adquirido.
A conservação da energia mecânica implica que, na posição de coordenada
, a energia cinética do sistema atinge o seu valor máximo e é igual à
energia mecânica, porque ali a energia potencial é nula:
(4)
(
Após passar o ponto de coordenada
, ou seja, na região em que
,a
força elástica passa a ser negativa, isto é, aponta no sentido negativo do eixo dos
x. Consequentemente, a aceleração do corpo é negativa o que implica que o
módulo da velocidade do corpo está a diminuir6. Eventualmente, a velocidade
anula-se, isto é, o corpo atinge o repouso. A coordenada de posição deste ponto
é, necessariamente,
, porque aí a energia cinética é de novo nula, pelo
que, de novo, a energia potencial elástica é igual à energia mecânica.
No ponto
o corpo encontra-se instantaneamente em repouso, actuado
pela força elástica, que tem sentido negativo e, consequentemente, tendo
aceleração também com sentido negativo. Vai então deslocar-se no sentido
negativo
do
eixo
dos
x,
aumentando
o
módulo
da
velocidade,
consequentemente a energia cinética7, até à posição de coordenada
e
. Neste
ponto a força elástica é nula e a energia cinética é máxima (igual à energia
mecânica), continuando o corpo a deslocar-se no sentido negativo do eixos dos x,
agora actuado pela
força
elástica
com sentido positivo,
diminuindo
progressivamente o módulo da velocidade (e a energia cinética), até o corpo
5
Consequentemente a energia cinética do sistema está a aumentar, enquanto que a energia potencial
elástica está a diminuir.
6
Nesta região, a energia cinética do sistema está a diminuir, enquanto que a energia potencial elástica
está a aumentar.
7
Mais uma vez, a energia cinética do sistema está a aumentar, enquanto que a energia potencial
elástica está a diminuir
4
atingir de novo o ponto de coordenada
, em que estará
instantaneamente em repouso, sujeito a uma força de sentido positivo e, portanto,
com aceleração no sentido positivo. Recomeça então o movimento, como
ocorreu no instante
.
2. A Lei da Força no Movimento Harmónico Simples
A análise qualitativa do movimento do corpo sujeito a uma força como a que é
dada pela lei de Hooke deve agora ser complementada por um tratamento
quantitativo simples.
Vamos associar a expressão da 2.ª Lei de Newton para o movimento de um corpo
actuado por uma força, no caso unidimensional (ao longo do eixo dos x),
(5)
com a lei de Hooke para a força elástica,
(6)
para obter
(7)
ou
(8)
Verificamos que a aceleração no movimento oscilatório harmónico não é
constante 8 , mas depende da posição. Não podemos, portanto, utilizar aqui as
equações do movimento uniformemente acelerado que estudámos no Cap. 3.
Utilizando a expressão da aceleração em termos de derivadas,
(
(
(9)
que pode ser escrita na forma
8
Como seria de esperar, porque já vimos que a força não é constante.
5
(
(10)
(
Esta expressão representa uma equação diferencial9, isto é, uma relação entre a
derivada (neste caso a 2.ª derivada) de uma função, ( , e a própria função. A
(
solução da equação é a função
que, substituída na equação, a satisfaz.
Neste caso concreto, e reescrevendo a Eq. (10) na forma
(
(
(11)
procuramos uma (ou mais) funções cuja 2.ª derivada seja igual à própria função
multiplicada por -1 e por uma constante positiva. Já conhecemos duas funções
com esta propriedade,
e
. Com efeito,
(
(
(
Concluímos que as funções
e
são soluções da equação diferencial
(10), desde que
(12)
Sabemos10 que não existe mais nenhuma função que seja solução da Eq. (10). Por
outro lado, uma propriedade deste tipo de equações é que a solução mais geral é
uma combinação linear das soluções possíveis, o que nos leva a concluir que a
solução geral da Eq. (10) é
9
Os matemáticos chamam-lhe “equação diferencial linear de 2.ª ordem com coeficientes constantes”. É
diferencial porque envolve derivadas, linear Dizem-se lineares porque todos os coeficientes são funções
de t (neste caso são constantes, de onde a expressão “com coeficientes constantes” e a função x(t) e as
suas derivadas têm todas expoente 1 (ou 0), e é de 2.ª ordem porque a derivada de ordem mais elevada
é a 2.ª.
10
Dizem-nos os matemáticos.
6
(
com
√ ⁄
e
e
(
(
(13)
constantes11. Assim, a constante
é determinada pelas
características do sistema, neste caso, a massa do corpo e a constante da mola,
enquanto que as outras duas constantes serão determinadas pelas condições
iniciais do movimento.
A Eq. (13) pode ser escrita na forma mais simples12
(
(
que contém também duas constantes,
e
(14)
, para além de
. A constante A
denomina-se amplitude do movimento – dá-nos o valor máximo da distância do
corpo que oscila à posição de equilíbrio, ou seja, é igual a
constante de
da Eq. (3). A
denomina-se constante de fase13. A amplitude e a constante de
fase são obtidas a partir das condições iniciais, ou seja, da posição e da
velocidade do corpo no instante
.
A Fig. 3. apresenta o gráfico da função (
Figura 3. Gráfico da função (
(
(
).
, com
.
11
A solução geral de uma equação diferencial de ordem n tem sempre n constantes, que são
determinadas pelas condições iniciais, como veremos.
12
Podemos facilmente demonstrar a identidade entre as Eq. (13) e (14), utilizando a relação
trigonométrica
(
Obtemos
(
(
(
com
e
.
13
Ao argumento do coseno, isto é,
(
, chamamos fase. A fase varia com o tempo, t.
7
Verificamos facilmente14 que, efectivamente este é o gráfico dessa função:
(
(
(
A função
)
)
(
)
(
(
)
(
(
)
(
(
)
(
)
)
) está representada na Fig. 4.
Figura 4. Gráfico da função
(
), para valores de
entre 0 e
.
Os valores da função seno repetem-se quando o argumento varia de múltiplos
inteiros de
(ou
), como mostra a figura 5.
A um intervalo do produto
igual a
(ou
) dá-se o nome de ciclo do
movimento oscilatório15. Num ciclo, o corpo oscilante, partindo de uma posição
qualquer, atinge uma das extremidades da trajectória do movimento, desloca-se
até á outra extremidade e regressa à posição de partida. Diz-se que efectua um
14
Recordamos que os valores da função coseno (e seno, e tangente, etc.) são os mesmos quando o
argumento varia de múltiplos inteiros de , isto é
(
(
(
(
15
Este intervalo pode ter início em qualquer valor do argumento do coseno, como se mostra na Fig. 4.
8
oscilação completa. O intervalo de tempo necessário para o corpo efectuar uma
oscilação completa, ou seja, a duração de um ciclo, denomina-se período do
movimento, que se representa por . Verifica-se assim que
(15)
ou
(16)
(
), para valores de
Figura 5. Gráfico da função (
entre 0 e . Os valores da
função repetem-se quando o argumento do coseno varia de valores inteiros de
(ou
). Por esta
razão, os valores em graus foram colocados de novo a partir de zero quando
. , valor máximo
da função ( , é a a amplitude do movimento. A um intervalo de
igual a
(contado a partir de
qualquer valor) dá-se o nome de ciclo.
A constante
denomina-se frequência angular do movimento oscilatório, tem
dimensões físicas de inverso de tempo e exprime-se em radianos por segundo.
Verificamos assim que o período do movimento depende, tal como a frequência
angular, apenas das características físicas do sistema, a massa do corpo que
oscila e a constante da mola elástica:
√
(17)
Se o período é, por exemplo, 1 s, então ocorre um ciclo (ou uma oscilação
completa) em cada segundo; se o período é 2 s, ocorre meia oscilação completa
por segundo; se o período é 0,5 s, ocorrem duas oscilações completas por
segundo; e assim sucessivamente. Ao número de oscilações completas por
unidade de tempo (ou seja, por segundo) chamamos frequência do movimento
oscilatório. A frequência, f, é, consequentemente, o inverso do período, tem
9
dimensões físicas de inverso de tempo e exprime-se em ciclos por segundo, ou
hertz (Hz): 1 Hz = 1 c/s. A frequência depende também apenas das características
físicas do movimento:
(18)
√
A figura 5 apresenta gráficos do movimento oscilatório, entre t = 0 e t = 1 s, para
4 valores de frequência.
(
), para valores de t entre 0 e 1 s, para diferentes
Figura 6. Gráficos da função (
valores da frequência: (a) f = 1 Hz; (b) f = 2 Hz; (c) f = 10 Hz; (d) f = 50 Hz.
As restantes constantes que surgem na Eq. (14) são determinadas pelas condições
iniciais do movimento, isto é, pelos valores da posição e da velocidade do corpo
no instante
.
10
A posição do corpo no instante
é
(
(19)
A expressão da velocidade do corpo, em função do tempo, obtém-se
diferenciando a Eq. (14) em ordem ao tempo
(
(
(20)
(
Consequentemente, a velocidade do corpo no instante
é
(
Se conhecermos os valores de
(21)
e
, a que chamamos condições iniciais do
movimento, podemos, combinando as Eq. (19) e (21), obter os valores da
amplitude e da frequência angular do movimento:
(22)
(23)
Quadrando e somando as Eq. (22) e (23), membro a membro, obtemos
( )
(
(24)
)
que conduz a
(25)
√
Por outro lado, dividindo, membro a membro, a Eq. (23) pela Eq. (22), obtemos
(26)
e
(
)
(27)
11
Figura 7. Gráficos de duas funções sinusoidais, com a mesma amplitude, a mesma frequência angular e
uma diferença de fase (diferença entre as duas constantes de fase) igual a
.
A figura 8 apresenta um exemplo de um sistema que efectua movimento
oscilatório harmónico simples, constituído por um corpo suspenso de uma mola
em hélice.
Figura 8. Um corpo suspenso de uma mola em hélice executa movimento oscilatório harmónico simples.
(A) representa um conjunto de “fotografias” do sistema tiradas em instantes de tempo separados por
intervalos de tempo iguais. (B) representa o gráfico da posição do corpo em função do tempo. A
(
expressão matemática do movimento expresso neste gráfico é (
.
3. A Energia no Movimento Harmónico Simples
Estamos agora em condições de verificar que, no movimento oscilatório
harmónico simples, cujas equações da posição e da velocidade são,
respectivamente, a Eq. (14) e a Eq. (20), a energia total, ou seja, a soma da
energia cinética (do corpo de massa m) e da energia potencial elástica
12
(acumulada na mola, cuja constante elástica é k), é constante, isto é tem o mesmo
valor em todos os instantes de tempo:
(
(28)
(
ou
(
Utilizando agora a relação
(29)
(
, obtemos
[
(
(
]
(30)
(31)
em que utilizámos a relação trigonométrica
(
para qualquer valor de
(
,
.
A Eq. (31) exprime, matematicamente, a conservação da energia total (neste
caso, a energia mecânica) do sistema. Verificamos também que, estando fixas a
massa m do corpo oscilante e a constante k da mola, esta energia depende apenas
do valor da constante da mola e da amplitude do movimento.
4. O Pêndulo Gravítico
O pêndulo gravítico é constituído por um corpo de pequenas dimensões,
suspenso de um fio inextensível e de massa desprezável cuja extremidade
superior está fixa (Fig. 9), sujeito apenas à força da gravidade. Facilmente se
verifica que a trajectória do corpo é circular, de raio igual ao comprimento do fio.
13
Figura 9. Um pêndulo gravítico. Repare-se que na figura está marcado o vector peso, bem como as
suas componentes radial e tangencial (ainda que com setas de tipo diferente)
4.1.
Movimento circular
Um corpo efectua movimento circular quando a sua trajectória é circular. Em
particular, a trajectória pode ser apenas um arco de circunferência.
Consideremos um disco que roda em torno do seu centro (Fig. 10). Suponhamos
que no início do movimento, o ponto P, que está à distância r do centro do disco,
O, se encontra sobre a linha horizontal de referência. Quando o disco roda, o ponto
P descreve uma trajectória circular de raio r (isto é, está sempre à mesma disância
do ponto O). Neste movimento, a trajectória de P é um arco de circunferência de
raio r e comprimento s. O ângulo ao centro correspondente a este arco é o ângulo
Figura 10. Quando o disco roda em torno do centro, O, o ponto P do disco efectua
movimento circular.
, que é definido como
Um ângulo não tem dimensões físicas porque é definido como um comprimento a
dividir por outro comprimento. Tem, no entanto, unidades:
Quando
, o ângulo
.
O ângulo ao centro correspondente a uma circunferência é
. Em
geral, mede-se o ângulo a partir do semi-eixo positivo (aponta para a direita)
14
horizontal (eixo dos x, em geral), no sentido directo (sentido oposto ao dos
ponteiros do relógio).
Os ângulos também podem ser medidos em graus (símbolo ). A relação entre
graus e radianos (símbolo rad) é
Consequentemente,
e
.
4.2.
Dinâmica do pêndulo gravítico
As forças exercidas no corpo de massa m (Fig. 9) são a tensão do fio ⃗⃗, que tem a
direcção do fio e o sentido para cima, e a força gravítica que a Terra exerce no
corpo (o peso deste, de módulo mg), que é vertical e dirigida para baixo.
Podemos decompor a tensão do fio em duas componentes ortogonais 16, tendo
uma a direcção do fio (componente radial) e a outra a direcção da tangente à
trajectória do corpo (componente tangencial). Se
é o ângulo entre a direcção do
fio e a vertical, considerando-se o ângulo positivo quando o corpo se encontra do
lado direito da vertical e negativo quando se encontra no outro lado, então as
expressões matemáticas das componentes da força gravítica são as seguintes:
componente radial:
;
componente tangencial:
É esta última componente que assegura o movimento do pêndulo. Neste caso, a
2.ª Lei de Newton assume a forma matemática
que, utilizando
, em que L é o comprimento do fio (igual ao raio da
trajectória do corpo), assume a forma
16
Isto é, perpendiculares uma à outra.
15
(
Quando o ângulo
(32)
(
é pequeno, verifica-se
, e a Eq. (32) transforma-se
em
(
(33)
(
A Eq. (33) é idêntica à Eq. (10), de onde concluímos que o movimento do
pêndulo é oscilatório harmónico simples, para pequenos valores da amplitude
(
do movimento. A frequência angular do movimento do pêndulo é
e, consequentemente o período é
√
√ . O período e a frequência do
movimento do pêndulo dependem apenas do comprimento do fio e da aceleração
resultante da gravidade no local, sendo independente da massa do pêndulo.
5. O Movimento Harmónico Simples Amortecido
Se, para além da força elástica, outra força exterior estiver a actuar no sistema, a
energia mecânica deste não se conserva. Se o trabalho dessa força exterior for
negativo, a energia mecânica do sistema vai diminuir, ou seja, vai ser retirada
energia ao sistema, como vimos no Capítulo 5.
Um exemplo é a força de atrito. Sobre o corpo oscilante representado na Fig. 8
exerce-se, para além da força elástica e da força gravítica 17 , uma força de
resistência, devido à presença do meio (Fig. 11). O sentido desta força é, em cada
instante, oposto ao do movimento e, consequentemente, o trabalho desta força é
negativo.
A energia mecânica do sistema irá diminuir com o tempo até, eventualmente se
anular. Como a energia mecânica do sistema é dada por
, em que A
17
A força gravítica é, neste caso, constante e tem como único efeito alterar a posição de equilíbrio do
sistema corpo mais mola
16
é a amplitude do movimento, concluímos que a amplitude do movimento vai
diminuir com o tempo18.
Figura 11. Se o corpo oscila no interior de um líquido, surge uma força de resistência ao
movimento.
Para obtermos a forma matemática da variação da amplitude com o tempo,
recorremos à 2.ª Lei de Newton. O módulo da força de resistência, no ar ou num
líquido viscoso é, em geral, proporcional à velocidade do corpo. A 2.ª Lei de
Newton exprime-se então, matematicamente, na forma
(34)
em que b é um constante, denominada coeficiente de amortecimento. Para
valores pequenos deste coeficiente, a solução desta equação é
(35)
(
em que
é o valor da amplitude para
m é a massa do corpo e
(36)
√
(
)
A frequência angular do movimento varia ligeiramente em relação à frequência
normal do movimento
√ ⁄
. A figura 12 apresenta o gráfico deste
movimento, denominado oscilatório harmónico amortecido.
18
Esta conclusão pode ser tirada também a partir da observação do gráfico da energia em função da
posição (Fig. 2). Se a energia total (energia mecânica diminui), a amplitude do movimento (
nesta
figura) irá também diminuir.
17
A amplitude do movimento vai variar com o tempo da seguinte forma
(37)
Figura 12. Representação gráfica da posição em função do tempo do movimento oscilatório
amortecido.
À quantidade
chamamos constante de tempo do movimento19.
6. Oscilações Forçadas e Ressonância
A energia do sistema perdida devido à existência de forças de resistência pode
ser resposta através da aplicação de uma força exterior que efectue trabalho
positivo sobre o sistema. A amplitude do movimento manter-se-á constante se a
energia fornecida por ciclo for exactamente igual à perda de energia mecânica
resultante das forças resistivas.
Após a força exterior começar a actuar, a amplitude das oscilações (forçadas)
aumentará. Após um intervalo de tempo suficientemente elevado,
Efornecida = Etransformada em energia interna
Eventualmente é atingido um estado estacionário e o movimento prosseguirá
com amplitude constante
19
Este nome resulta do facto de (
ou (
.
18
Se a força exterior variar com o tempo com frequência angular
, a amplitude do
movimento será
⁄
√(
(38)
(
)
Facilmente se conclui que a amplitude aumenta quando a frequência angular da
força exterior, , estiver muito próxima da frequência natural do oscilador,
.
Dizemos então que existe ressonância entre o sistema e a força exterior.
Figura 13. Representação gráfica da amplitude em função da frequência angular da força
exterior aplicada.
A ressonância (o máximo do pico) ocorre quando a frequência da força aplicada
é igual à frequência natural do movimento. A amplitude aumenta quando o
amortecimento diminui.
19