Instituto Superior de Engenharia do Porto
Departamento de Engenharia Electrotécnica
Licenciatura em Engenharia Electrotécnica e de Computadores
SISEL - Sistemas Electromecânicos
Exercícios de
Gráficos de ligação energética (Bond Graphs)
2006
SISEL - Sistemas Electromecânicos
Gráficos de ligação energética
R1
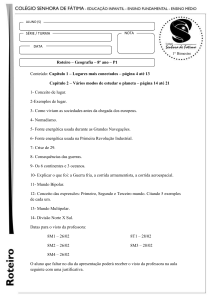
1. Considere o circuito eléctrico representado na figura e o
correspondente gráfico de ligação energética (bond graph) onde
os símbolos α, β e γ representam elementos do sistema. Então,
vem:
R2
L
+
C2
C1
V
1.a)
A) α = R2
B) β = R2
C) γ = R2
D) Outro resultado
−
C2
1.b)
A) α = L
B) β = L
C) γ = L
D) Outro resultado
SE:
V
1
0
1
0
γ
β
α
R1
2. Considere o circuito eléctrico representado na figura e o correspondente gráfico de ligação energética onde os
símbolos α, β e γ representam elementos do sistema. Então, vem:
L
R1
R2
R2
−
+
SE:
V1
C1
0
1
0
V2
V1
+
−
A) α = V2
1
B) β = V2
γ
R1
C) γ = V2
α
β
D) Outro resultado
3. Considere o circuito eléctrico representado na figura e o correspondente gráfico de ligação energética (bond
graph) onde os símbolos {α, β, γ} representam elementos do sistema. Então, vem:
R1
R2
A) α = R2, β = C1, γ = C2
SF:
B) α = C1, β = R2, γ = C2
1
0
1
I
C) α = C2, β = R2, γ = C1
D) α = C2, β = C1, γ = R2
I
R1
β
α
C2
C1
1
γ
SISEL - Sistemas Electromecânicos
Gráficos de ligação energética
4. Considere o sistema mecânico e o correspondente gráfico de ligação energética
representados nas figuras. Então, vem:
Α) α representa uma junção tipo 0
Β) α representa uma junção tipo 1
C) α representa um transformador TF
D) α representa um girador GY
f(t)
K
B
K
v3
M
v
v
SE
v
α
B
v3
M
5. Considere o sistema mecânico e o correspondente gráfico de ligação
energética representados nas figuras. Então, vem:
v1
f(t)
Α) α representa uma junção tipo 0
Β) α representa uma junção tipo 1
C) α representa um transformador TF
D) α representa um girador GY
SE
vi
M
f(t)
SF
f
0
β
B1
B2
B
2K
2K
K
x1(t)
v1
α
B2
B1
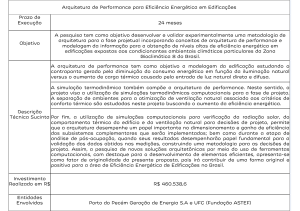
6. Considere o sistema mecânico representado na figura seguinte, onde f(t) é a
força aplicada, x1(t) e x2(t) são deslocamentos e K e B as constantes de rigidez
das molas e de atrito viscoso. Este sistema foi proposto para compensação de
sistemas mecânicos. O gráfico de ligação energética (bond graph) do sistema
vem:
A) α = 2K
B) β = 2K
C) γ = 2K
D) Outro resultado
M
v2
vi
K
K
v1
1
v2
x2(t)
α
f
0
2K
Causalidade
diferencial
forçada
γ
β
7. Considere o sistema mecânico e o respectivo gráfico de ligação energética (bond graph) representados nas
figuras. Então, vem:
B2
B1
x2
x1
f(t)
K
B1
A) α = M1
C) α = M2
M1
M2
B) α = K
D) Outro resultado
B2
SF
f
v1
0
v1
1
v2
0
f
α
β
M2
2
SISEL - Sistemas Electromecânicos
Gráficos de ligação energética
8. Considere o sistema mecânico envolvendo uma engrenagem com razão de transformação n = N1/N2 e o
respectivo gráfico de ligação energética (Bond Graph) representados nas figuras. Então:
B2
B1
N1
J1
T1, ω1
T2, ω2
ω1
T1
B1
B2
ω1
0
ω2
TF
n
T1
0
N2
SF: T2
M1
A) O elemento T1 é uma fonte de esforço
C) O elemento T1 é um elemento dissipador
B) O elemento T1 é uma fonte de fluxo
D) Outro resultado
9. Considere o sistema mecânico da figura e o correspondente gráfico de ligação energética (bond graph) onde os
símbolos {α, β, γ} representam elementos do sistema. Então, vem:
A) α = K1, β = M1, γ = M2
B) α = M1, β = K1, γ = M2
C) α = K1, β = M2, γ = M1
D) α = M1, β = M2, γ = K1
K1
SF:
f
x2
f, x1
β
1
0
M2
B1
Κ2
α
M1
0
K2
γ
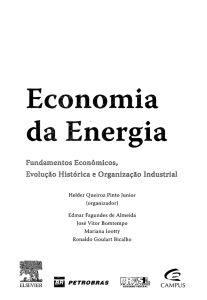
10. Considere o sistema mecânico representado na
figura, com uma carga, constituída por uma massa ML,
uma mola KL e um atrito BL, accionada através de um
motor, com inércia Jm e atrito Bm. O motor desenvolve
um binário Tm, um deslocamento angular θ e encontra-se
acoplado a um parafuso com passo h. A massa da carga
desloca-se da distância (linear) xL. Considere o gráfico
de ligação energética (bond graph) onde os símbolos α,
β e γ representam elementos do sistema. Então, vem:
A) α = K
B) α = B
C) α = ML
D) Outro resultado
motor
T m, θ
B1
h
K
Jm
B
Bm
x
x& L
carga
ML
BL
xL
α
0
SF:
Tm
θ&
Jm
x&
0
TF
h/(2π)
Bm
BL
1
β
0
γ
3
SISEL - Sistemas Electromecânicos
Gráficos de ligação energética
f(t)
11. Considere o sistema mecânico da figura onde v1 e v2 e l1
e l2 representam, respectivamente, as velocidades de
deslocamento e os comprimentos dos braços dos dois lados
da alavanca. Então, sendo m = l2/l1, o respectivo gráfico de
ligação energética (Bond Graph) vem:
v1
M
v2
l2
l1
B
K
A)
B)
B
SE
f
v1
1
v1
f
TF
m
v2
B
SF
f
1
Μ
v1
v1
0
v2
TF
m
f
0
Μ
K
C)
K
D) Outro resultado
B
SF
f
v1
1
f
v1
TF
m
v2
0
Μ
K
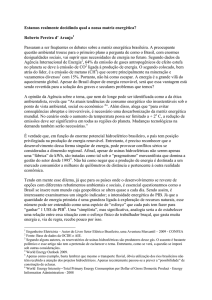
12. Considere o sistema mecânico representado na figura, de uma carga (constituída por uma massa ML, um
atrito BL e uma força resistente FL) accionada através de um motor (com atrito Bm) e um parafuso com passo h. O
motor desenvolve um binário Tm a velocidade angular ω e a carga desloca-se da distância (linear) x. O respectivo
gráfico de ligação energética (com n = h/(2π)) está também representado. Então, vem:
A) β = ML
B) α = ML
C) Outro resultado
carga
h
motor
T m, ω
Bm
SF
Tm
ML
ω
0
Βm
x, FL
BL
TF
n
x&
0
α
SF
TL
β
4
SISEL - Sistemas Electromecânicos
Gráficos de ligação energética
13. Considere a transmissão mecânica representada na figura onde:
B e K são os coeficientes de atrito e de rigidez da transmissão,
motor
Jm e JL são as inércias do motor e da carga,
Bm e BL são os coeficientes de atrito do motor e da carga,
Tm é o binário motor,
Jm
θm e θL são os deslocamentos angulares do motor e da carga,
ωm e ωL são as velocidades angulares do motor e da carga;
Tm
e o correspondente gráfico de ligação energética, onde os
Bm
símbolos α, β e γ representam elementos do sistema.
Então, vem:
A) α = BL
C) α = Bm
carga
transmissão
JL
K
θm
B
θL
BL
JL
B) α = B
D) Outro resultado
L
m
SF
Tm
0
1
Jm
0
0
K
14. Considere o sistema mecânico e o correspondente gráfico de
ligação energética (bond graph).
x1(t)
x3(t)
M
K1
α
β
γ
0
1
0
K2
B2
x2(t)
K1
B1
B1
M
B2
f1(t)
SF:
F1
K2
f2(t)
SF:
F2
14.a) Indique a que tipos de junções correspondem os parâmetros α, β, γ.
14.b) Discuta e atribua as causalidades ao gráfico de ligação energética apresentado.
15. Considere o sistema mecânico da figura e o correspondente gráfico de ligação energética (bond graph) onde
os símbolos α, β, χ, δ e γ representam elementos do sistema. Então, vem:
K1
T, θ1
J1
A) γ = B1
C) γ = K2
B1
B) γ = K1
D) γ = J1
K2
θ2
SF:
T
0
1
0
δ
0
γ
χ
B2
α
β
5
SISEL - Sistemas Electromecânicos
Gráficos de ligação energética
16.
Considere
o
agitador
electromecânico representado na figura.
Considere, para simplificar o tratamento
matemático, que a força f(t) produzida
pelo solenóide e a força contra+
electromotriz eb(t) induzida pelo núcleo
ferro-magnético
têm
relações
vi
aproximadamente
lineares,
respectivamente com as expressões
−
f(t) = Ki i(t) e eb (t ) = K i x& (t ) , onde Ki é
uma constante de proporcionalidade, i(t)
a corrente eléctrica no enrolamento e
x& (t ) a velocidade de deslocamento do
núcleo com massa M. O gráfico de
ligação energética (bond graph) do sistema vem:
+
eb(t)
x(t)
i(t)
vi
SE:
vi
eb
1
i
K
L
R
núcleo ferro-magnético
solenóide
M
x&
TF
1/Ki
i
0
K
f
B
L
M
R
B)
SF:
i
vi
0
i
C)
SF:
i
vi
i
eb
TF
1/Ki
i
1
x&
1
K
f
L
B
R
M
eb
GY
Ki
i
L
B
M
R
A)
f(t)
−
x&
1
K
f
B
D) Outro resultado
6
SISEL - Sistemas Electromecânicos
Gráficos de ligação energética
17. Considere o sistema mecânico da figura e o correspondente gráfico de ligação energética (bond graph) onde
os símbolos α, β, η, δ, χ e γ representam elementos do sistema. Então, vem:
K1
K2
θ2
T, θ1
SF:
T
0
0
0
γ
η
B2
B1
χ
δ
J1
K3
A) γ = K1
1
B) γ = K2
C) γ = K3
β
α
D) γ = B2
18. Considere o sistema mecânico (onde Tm e TL são, respectivamente, os binários aplicado pelo motor e
solicitados pela carga) e o correspondente gráfico de ligação energética (bond graph) onde os símbolos α, β e γ
representam elementos do sistema. Então, vem:
A) α = J1
B) α = B1
C) α = J3
D) Outro resultado
θ0
B1
T1
T m, θ 1
K2
θ 2, T 2
NA
J1
SF:
Tm
0
1
TL, θ3
0
TF
β
γ
α
J3
SF:
TL
NB
B3
B3
K2
19. Considere o sistema mecânico representado na figura e o correspondente gráfico de ligação energética (bond
graph) onde os símbolos α, β e γ representam elementos do sistema. Então, vem:
A) α = K1
B) α = B1
C) α = J3
D) Outro resultado
K1
T1
T m, θ 1
J1
K2
θ0
θ2, T2
NA
B2
B1
TL, θ3
J3
NB
SF:
Tm
0
1
γ
0
α
0
TF
J1
SF:
TL
B3
B3
0
β
K2
B2
7
SISEL - Sistemas Electromecânicos
Gráficos de ligação energética
20. Considere o circuito eléctrico representado na figura. Esboce o
correspondente gráfico de ligação energética (bond graph) sem esquecer
de indicar a causalidade nos elementos.
R1
R2
+
V
−
C1
C2
21. Construa o gráfico de ligação energética (“Bond Graph”) (incluindo a causalidade) do seguinte sistema
eléctrico:
L1
R1
+
N1
R2
C2
C1
E
N2
C3
I
-
n=N2/N1
22. Considere um sistema electromecânico representado pelo seguinte “Bond Graph”:
R
Se
J2
L
J1
1
:U
B1
TF
0
TF
:1/n1
:w1
:n2
w2
0
B2
22.a) Atribua a causalidade e complete o gráfico colocando as variáveis de esforço e fluxo em cada uma das
ligações (bonds).
22.b) Retire as equações constitutivas relativas aos elementos TF e à junção tipo 1.
23. Considere o circuito em ponte de Wheatstone representado na figura seguinte, onde R1, R2, R3 e R4 são as
resistências de cada um dos braços da ponte e V a tensão aplicada. Desenhe o gráfico de ligação energética (bond
graph) do circuito e atribua-lhe a respectiva causalidade.
R1
V
+
-
R3
B
A
R2
R4
VAB
8
SISEL - Sistemas Electromecânicos
Gráficos de ligação energética
24. Desenhe um sistema eléctrico que possa ser modelizado pelo seguinte gráfico de ligação energética (“Bond
Graph”):
R1
Sf
L
C1
0
C2
R2
1
0
R3
25. Considere o sistema mecânico representado na figura, onde f(t) é a força
aplicada, x1(t) e x2(t) são deslocamentos e Ki e Bi (i = 1,2) são,
respectivamente, as constantes de rigidez das molas e de atrito viscoso.
Esboce o gráfico de ligação energética (bond graph) do sistema.
B1
B2
K1
K2
f(t)
x1(t)
26. Considere o sistema mecânico representado na
figura, de uma carga (constituída por uma mola KL e
um atrito BL) accionada através de um motor (com
inércia Jm) e um parafuso com passo h. O motor
desenvolve um binário Tm, uma velocidade angular ω
e a carga desloca-se da distância (linear) x. Esboce o
gráfico de ligação energética (bond graph) do sistema
(faça n = h/(2π)).
T m, ω
motor
x2(t)
carga
h
KL
Jm
BL
x
f(t)
27. Considere o sistema mecânico da figura onde x1 e x2 e
l1 e l2 representam, respectivamente, os deslocamentos e os
comprimentos dos braços dos dois lados da alavanca.
Esboce o gráfico de ligação energética para o sistema
mecânico do problema.
M
x2
l2
l1
x1
B2
B1
K
x2
28. Considere o sistema mecânico da figura onde {x1,
x2} e {l1, l2} representam, respectivamente, os
deslocamentos e os comprimentos dos braços dos
dois lados da alavanca e f é a força aplicada. Esboce
o gráfico de ligação energética (bond graph) do
sistema (faça n = l2/l1).
29. Considere o sistema mecânico representado
na figura, de uma carga (constituída por uma
massa ML, um atrito BL e uma força resistente FL)
accionada através de um motor (com atrito Bm) e
um parafuso com passo h. O motor desenvolve
um binário Tm a velocidade angular ω e a carga
Bm
desloca-se da distância (linear) x. Esboce o
respectivo gráfico de ligação energética com n = h/(2π).
x1
f(t)
l2
l1
M
B
K
carga
h
motor
ML
T m, ω
x, FL
BL
9
SISEL - Sistemas Electromecânicos
Gráficos de ligação energética
B
f(t)
30. Considere o sistema mecânico representado na figura. Esboce o
gráfico de ligação energética do sistema indicando as causalidades.
Para evitar conflitos de causalidade seleccione na entrada ou uma
fonte de esforço ou uma fonte de fluxo, conforme achar mais
adequado.
31. Considere o sistema mecânico representado na figura.
Esboce o gráfico de ligação energética do sistema
indicando as causalidades. Para evitar conflitos de
causalidade seleccione na entrada ou uma fonte de esforço
ou uma fonte de fluxo, conforme achar mais adequado.
32. Considere o sistema mecânico da figura onde {x1,
x2}, {f1, f2} e {l1, l2} representam, respectivamente, os
deslocamentos, as forças e os comprimentos dos braços
dos dois lados da alavanca. Se n = l2/l1, esboçe o
gráfico de ligação energética do sistema mecânico e
discuta a causalidade.
x1(t)
f(t)
K2
K1
M
x3(t)
x2(t)
B
K1
K2
M
x1(t)
x3(t)
x2(t)
f1(t)
f2(t)
x1
34. Considere o sistema mecânico representado na figura.
Esboce o correspondente gráfico de ligação energética.
B2
K2
x(t)
T, θ
K
h
M
Motor
B
x2
x1
f(t)
K2
M
xi
K1
x1
35. Considere o sistema da figura onde x1 e x2 e l1 e l2
representam, respectivamente, os deslocamentos e os
comprimentos dos braços dos dois lados da alavanca. Esboce o
correspondente gráfico de ligação energética.
M2
B1
K1
33. Considere o sistema mecânico representado na figura
constituido por uma carga com massa M e uma mola de
rigidez K accionada através de um motor e um parafuso
com passo h. Existe um atrito angular B no parafuso
conforme indicado. O motor desenvolve um binário T para
um deslocamento angular θ e a carga desloca-se da
distância linear x. Esboçe o gráfico de ligação energética do
sistema mecânico e discuta a causalidade.
l2
l1
M1
x2
B2
B1
f(t)
x2
M
l1
l2
B
K
10
SISEL - Sistemas Electromecânicos
Gráficos de ligação energética
f2(t)
f1(t)
x1
M1
36. Considere o sistema mecânico representado na figura,
onde x1, x2 e x3 são deslocamentos e l1 e l2 representam os
comprimentos dos braços dos dois lados da alavanca. Esboce
o respectivo gráfico de ligação energética considerando as
causalidades.
x2
l2
l1
B
K
x3
M2
37. A figura representa um sistema de posicionamento de peças a maquinar. A peça é posicionada através de um
sistema de parafuso, de passo h, actuado por um motor DC. Seja B1 o atrito linear entre a carga e o solo e B2 e B3
os atritos rotacionais entre o parafuso e os suportes.
Construa o gráfico de ligação energética do sistema e indique a causalidade dos elementos.
M
V
B3
B2
Motor DC
B1
38. Considere o sistema mecânico representado na figura, constituído por uma carga (com inércia JL e atrito BL)
accionada através de um motor DC (com inductância La, resistência Ra, f.c.e.m eb = Kb ωm, inércia Jm e atrito Bm)
controlado pela armadura (tensão e corrente da armadura ua e ia, respectivamente). A transmissão é efectuada por
um parafuso (com passo h). O parafuso é não-ideal apresentando, respectivamente, coeficientes de atrito e de
rigidez rotacionais B e K. O motor DC desenvolve um binário Tm = KT ia, (considere KT = Kb) para um
deslocamento angular θm e a carga desloca-se da distância linear x. Esboce o respectivo gráfico de ligação
energética indicando as causalidades.
ia
La
motor DC
+
eb
+
ua
−
transmissão
K
f, x
carga
ML
fL
Jm
−
Ra
h
T m, θ m
Bm
B
T, θL
BL
11
SISEL - Sistemas Electromecânicos
Gráficos de ligação energética
39. A figura A representa um sistema de tracção de um leitor de fitas magnéticas utilizando um motor DC de
íman permanente controlado pela armadura. O modelo do sistema é apresentado na figura B. A constante K
representa a constante de elasticidade da fita magnética e B o coeficiente de atrito resultante da passagem da fita
pelo mecanismo de tracção. Os valores dos parâmetros do sistema são os seguintes:
Ki = 0,07 Nm/A
Kb = 0,07 Vs/rad
La ≅ 0 H
Ra = 0,25 Ω
Un = 3V
Ki, Kb, Ra, La
B = 0,07 Ns/rad
K = 20 N/rad
JL = 0,04 Ns2/rad
Jm = 0,0004 Ns2/rad
Bm = 0,02 Ns/rad
Figura A
transmissão
Ki, Kb, Ra, La
Ea
Motor
JL
K
Jm
θm
Tm
B
θL
Bm
Figura B
O motor é alimentado por um conversor DC-DC com operação num único quadrante (U, I) e com tensão de saída
ea controlável. Apresente o bond graph do sistema.
40. A figura representa um agitador electromecânico. Considere, para simplificar o tratamento matemático, que a
força f produzida pelo solenóide e a força contra-electromotriz eb induzida pelo núcleo ferro-magnético têm
relações aproximadamente lineares, respectivamente com as expressões f = Ki i e eb = Ki dx1/dt, onde Ki é uma
constante de proporcionalidade, i a corrente eléctrica no enrolamento e dx1/dt a velocidade de deslocamento do
núcleo com massa M1. Seja x2 o deslocamento de uma carga com massa M2. Determine o gráfico de ligação
energética (bond graph) do sistema.
+
eb
−
f, x1
i
+
x2
B
M2
M1
vi
−
solenóide
L
R
B1
K
B2
núcleo ferro-magnético
12
SISEL - Sistemas Electromecânicos
Gráficos de ligação energética
41. Na figura seguinte é apresentado o modelo linearizado de um braço de um robô, actuado por um motor DC
controlado pela armadura por intermédio de uma engrenagem com razão de transformação n = N1/N2.
TL
Braço do
robô
B2, J2
ω 2, T2
N1
N2
ω 1, T1
R
v
i
L
Motor DC
+
e
-
B1, J1
41.a) Construa o gráfico de ligação energética (bond graph) do sistema, considerando que:
Tm - binário motor
Ki - constante de binário do motor
Ki = Kt = K
Kt - constante da f.c.e.m. do motor
V - tensão de alimentação da armadura do motor DC
i - corrente na armadura do motor DC
J1 - inércia do motor
B1 - coeficiente de atrito viscoso do motor
ω1 - velocidade angular do veio do motor
e - força contra-electromotriz (f.c.e.m.) do motor
R - resistência da armadura do motor
L - inductância da armadura do motor
J2 - inércia do braço do robô
}
TL - binário resistente a actuar sobre o braço do robô
ω2 - velocidade angular do braço do robô
B2 - coeficiente de atrito viscoso do braço do robô
N1 - número de dentes da roda da engrenagem do
lado do motor
N2 - número de dentes da roda da engrenagem do
lado do braço
T1 – binário aplicado à engrenagem do lado do motor
T2 – binário transmitido à engrenagem do lado do
braço
41.b) Analise a causalidade e justifique os resultados.
42. A figura seguinte representa um veículo (tractor) puxando um reboque através de um mecanismo de engate
modelizado por um sistema mola-amortecedor. Os parâmetros e variáveis definidos são: M é a massa do
reboque, K1 e B1 é o coeficiente, respectivamente, da constante da mola e do amortecedor do mecanismo de
engate. B2 representa o coeficiente de atrito do reboque, x1(t) e x2(t) é o deslocamento, respectivamente, do
veículo e do reboque e f1(t) é a força do veículo (tractor). Determine o gráfico de ligação energética do sistema
mecânico e discuta a causalidade.
f1(t), x1(t)
x2(t)
K1
Reboque
M
B1
B2
13
SISEL - Sistemas Electromecânicos
Gráficos de ligação energética
43. A figura apresenta o esquema de um automóvel eléctrico actuado através de um motor DC controlado através
da tensão da armadura Ua. A tensão de alimentação do motor é fornecida por um conversor DC-DC que permite
converter a tensão das baterias numa tensão variável de 0 a 240V, controlada através do acelerador. O motor DC
está acoplado por uma engrenagem n1=1:3,8 à caixa de velocidades que, por sua vez, apresenta uma relação
variável n2 ∈ {1:4; 1:2,4; 1:1.7; 1:1}. O veículo tem massa M=1400kg e o raio das rodas é r=0,25m. Considere
que a força devido à resistência do ar Fa pode ser modelizada como um atrito viscoso com coeficiente B=25
Ns/m. Os dados do motor DC são os seguintes:
Ki = 0,35 Nm/A
Kb = 0,35 V/rad/s
La ≅ 0 H
Ra = 0,22 Ω
Bm = 0,027 N/rad/s
Jm = 0,25 N/rad/s2
Pn = 41 kW
Tn = 75 Nm
Tmax = 350 Nm
velocidade v
Ua
Motor DC
Bm
Jm
ωm, T1
n1=1:3,8
Caixa de
Velocidades
n2
Fa
Acelerador
0-100%
ω2, T2
Baterias
Conversor DC-DC
ω3, T3
r
Apresente o gráfico de ligação energética deste sistema (considere Ua como a entrada do sistema).
44. O sistema representa uma suspensão de automóvel onde x0 (variável
de saída) representa o deslocamento verificado pelos passageiros e x3
(variável de entrada) o deslocamento da parte do pneu em contacto com
a estrada. A força f(t) representa a perturbação introduzida pelos efeitos
aerodinâmicos. Determine o gráfico de ligação energética do sistema
mecânico representado na figura e discuta a causalidade.
45. Determine o gráfico de ligação energética do sistema mecânico representado na figura e discuta a
causalidade.
P – pressão de alimentação,
q – caudal,
R – resistência hidráulica,
Pc – pressão na câmara do cilindro,
A – área
k – rigidez da mola,
m – massa,
x – deslocamento
14
SISEL - Sistemas Electromecânicos
Gráficos de ligação energética
46. Determine o gráfico de ligação energética do sistema mecânico representado na figura e discuta a
causalidade. Considere que a haste do cilindro é:
46.a) Perfeitamente rígida.
46.b) Flexível ao longo do seu eixo
longitudinal com parâmetros de rigidez e
atrito viscoso K e B, respectivamente.
P – pressão de alimentação
q1 e q2 – caudal
Rf – resistência hidráulica
Cf – capacidade hidráulica
Lf – inertãncia hidráulica
A – área do embolo do cilindro
ML – massa da carga
BL – atrito da carga
x – deslocamento da carga
15
SISEL - Sistemas Electromecânicos
Gráficos de ligação energética (soluções)
Soluções
1.
1.a)
1.b)
C) γ = R2
B) β = L
C2
SE:
V
1
0
1
0
Rγ2
2.
C) γ = V2
3.
B) α = C1, β = R2, γ = C2
4.
Β) α representa uma junção tipo 1
5.
Β) α representa uma junção tipo 1
6.
A) α = 2K
γ=B
β=K
7.
A) α = M1
β=Κ
8.
B) O elemento T1 é uma fonte de fluxo
9.
D) α = M1, β = M2, γ = K1
10.
C) α = ML
11.
B)
12.
B) α = ML
13.
C) α = Bm
Lβ
C1
C
R1
JL
Bm
SF
Tm
m
Tm
0
m
1
L
0
Jm
B
0
BL
K
1
SISEL - Sistemas Electromecânicos
Gráficos de ligação energética (soluções)
14.
SF:
F1
15.
A) γ = B1
16.
A)
17.
D) γ = B2
18.
B) α = B1
19.
A) α = K1
B1
M
K1
α
1
β
0
γ
1
0
1
0
K2
B2
SF:
F2
20.
C2
SE
V
0
1
R2
1
R1
C1
21.
Se:E
Sf:I
R1
C1
L1
C2
1
0
1
0
0
1
C3
R2
TF:n
2
SISEL - Sistemas Electromecânicos
Gráficos de ligação energética (soluções)
22.
22.a)
R
u
i
:U
J1
TI1
w1
uL
uR
i
Se
J2
L
i
1
:i
u1
i
TF
:1/n1
w1
T1
Causalidade
diferencial
B1
TB1
w1
w1
0
T2
:w1
w2 TI2
w2
TF
T3
:n 2
w2
TB2
0
B2
22.b)
⎧u = n1 w1
⎯
⎯→ ⎨ 1
⎩ T1 = n1i
⎧ w = n 2 w1
⎯
⎯→ ⎨ 2
⎩ T2 = n 2T3
i
⎧
junção 1 ⎯
⎯→ ⎨
⎩u L = u − (u R + u1 )
23.
i1
+
-
R1
R3
R1
V
i3
B
A
B
-
A
i
R4
R2
R3
VAB
+
V
i2
VAB
R2
R1
R4
R2
VB
1
0
i2
V
i1
SE
V
1
0
VAB
SF
i
i3
1
R3
VA
0
R4
3
SISEL - Sistemas Electromecânicos
Gráficos de ligação energética (soluções)
24.
R1
L
C1
Sf
0
C2
R2
1
0
:i
: v2
: v1
L
v1
R3
R2
v2
i
I
R1
C1
C2
R3
25.
B2
x1
f
SF
f
x2
1
0
K2
0
B1
K1
26.
KL
SF
Tm
0
θ&
TF
x&
0
n
BL
Jm
27.
K
SF
f
x1
f
M
0
x1
f1
TF
n=l2/l1
x2
f2
B2
B1
4
SISEL - Sistemas Electromecânicos
Gráficos de ligação energética (soluções)
28.
K
SF
f
x1
f
0
x1
f1
TF
n=l2/l1
x2
f2
M
B
29.
BL
SF
Tm
ω
0
0
TF
n
Bm
x
SF
FL
ML
30.
SE
: x1
x1
f
K1
K2
1
0
x3
M
B
K1
K2
31.
SE
: x1
x1
f
1
B
x3
0
M
5
SISEL - Sistemas Electromecânicos
Gráficos de ligação energética (soluções)
32.
K1
SF
f1
x1
f1
x1
0
x2
TF
n
0
K2
B1
M1
Uma solução:
M2
Problema de
causalidade
x2
f2
SF
f2
B2
f1(t)
x1
l2
l1
M1
x3
K3
f2(t)
x2
B1
K1
M2
K2
K1
SF
f1
x1
f1
0
M2
K3
x1
TF
n
x3
1
x2
0
K2
B1
M1
B2
x2
f2
SF
f2
B2
33.
M
SF
:Tm
θ&
Tm
0
B
θ&
TF
n
x&
0
K
6
SISEL - Sistemas Electromecânicos
Gráficos de ligação energética (soluções)
34.
SE
:xi
xi
f
K1
K2
1
0
B1
B2
M
35.
M
SF
f
x1
f
TF
n
x2
K
0
n=l2/l1
B
36.
M1
SF
f
x1
f
TF
n
x2
1
0
x3
M2
n=l2/l1
0
B
K
37.
B2
La
SE
1
Ra
TF
0
B3
B1
TF
h/2.pi
0
M
7
SISEL - Sistemas Electromecânicos
Gráficos de ligação energética (soluções)
38.
Bm
La
SE
ua
ua
ia
eb
ia
1
m
TF
1/Kb
Tm
Ra
BL
K
m
0
L
1
Jm
T
x
f
TF
h/2.pi
1
SE
fL
JL
B
39.
Jm
La
SE
ea
ea
i
eb
i
1
TF
: 1/Ki
Tm
Ra
0
1
Bm
0
JL
B
K
40.
L
SE
vi
vi
i
1
R
M2
B1
eb
i
TF
1/Ki
x1
f
x1
0
1
x2
0
B2
0
M1
B
K
8
SISEL - Sistemas Electromecânicos
Gráficos de ligação energética (soluções)
41.
L
SE
V
1
B2
J1
e
i
TF
: 1/K
ω1
Tm
0
ω1
T1
TF
:n
SF
TL
0
T2
Causalidade
diferencial
forçada >>>
B1
R
ω2
J2
42.
M
SF
f1
1
0
0
B2
K1
B1
43.
La
SE
Ua
Jm
e
i
1
TF
1/K
w
T
Causalidade diferencial forçada >>>
0
TF
TF
TF
n1
n2
r
0
Bm
Ra
M
Bm
44.
M1
M0
SF
f
0
1
M2
0
1
0
B0
0
0
0
K0
B1
SE
x3
1
K1
B2
K2
9
SISEL - Sistemas Electromecânicos
Gráficos de ligação energética (soluções)
45.
M
⎧ F = Pc A
⎨
⎩ Ax& = q
SE
P
P
q
1
Pc
q
x&
GY
m=1/A
0
F
K
R
46.
46.a)
ML
CF
RF
Problema de causalidade
(haste rígida)
SE
P
q1
1
0
q2
GY
1
0
x&
BL
LF
46.b)
SE
P
q1
RF
CF
1
0
ML
q2
1
GY
1
LF
0
x&
BL
0
K
B
haste não rígida
10