Introdução à Dinâmica
Analítica
Vibrações e Ruído (10375)
2016
Pedro V. Gamboa
Departamento de Ciências Aeroespaciais
Tópicos
•
•
•
•
•
2
Contextualização e perspetiva histórica.
Revisões de conceitos físicos fundamentais.
Tipos de solicitações dinâmicas.
Discretização de sistemas e graus de liberdade.
Elementos de um sistema vibratório.
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa
Faculdade de Engenharia
Universidade da Beira Interior
1. Perspetiva Histórica
• O movimento dos corpos e o equilíbrio de forças é
assunto de discussão desde a Antiguidade explicação
de fenómenos naturais e evidências da vida quotidiana.
• Aristóteles (384-322 a.C.) acreditava que um corpo só
podia manter um movimento uniforme desde que fosse
sujeito à ação de uma força contínua; não havia
conceitos básicos como atrito, massa e pressão
atmosférica! Alguns princípios da Mecânica estática
foram compreendidos, mas o mesmo não se passou
relativamente à cinemática e dinâmica.
3
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa
Faculdade de Engenharia
Universidade da Beira Interior
1. Perspetiva Histórica
• Galileu (1564-1642) debruçou-se sobre as leis da
dinâmica constatou a independência entre o peso e
o período de oscilação de corpos suspensos
(experiências de quedas de corpos na torre de Pisa);
introduz o conceito de aceleração e de inércia de
movimento.
• Newton (1643-1727) introduz o conceito de referencial
inercial em repouso ou em movimento uniforme em
relação a um espaço fixo; identifica a força como sendo
igual ao produto da massa pela aceleração; adota o
conceito de quantidade de movimento definido por
Descartes (1596-1650); formula teorias sobre a atração
das montanhas sobre um pêndulo e sobre a velocidade
do som no ar; introduz o conceito de massa.
4
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa
Faculdade de Engenharia
Universidade da Beira Interior
1. Perspetiva Histórica
• Huygens (1629-1695) formulou a teoria da força
centrífuga e inventou o movimento pendular baseado
naquela força; prefere recorrer ao trabalho como
entidade principal do movimento dos corpos.
• D’Alembert (1717-1783) publica o Tratado da Dinâmica
onde refere que o somatório de todas as forças (de
inércia, aplicadas ou de reação) dão origem a uma
força efetiva que terá de ser igual a zero para que um
corpo esteja em equilíbrio; trabalhou na teoria de
vibrações de cordas.
5
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa
Faculdade de Engenharia
Universidade da Beira Interior
1. Perspetiva Histórica
• Euler (1707-1783) desenvolveu o cálculo variacional,
propondo um método geral para a determinação de
funções máxima e mínima.
• Lagrange (1736-1813) abordou os problemas de
dinâmica numa perspectiva puramente matemática,
sendo o pai da Mecânica Analítica (ao invés de Newton
que tinha preferido uma abordagem geométrica ou
sintética).
6
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa
Faculdade de Engenharia
Universidade da Beira Interior
1. Perspetiva Histórica
• Hamilton (1805-1865) procurou deduzir as equações da
dinâmica a partir de um princípio geral aplicando o
cálculo variacional; deduziu equações que são formas
canónicas das equações da dinâmica.
7
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa
Faculdade de Engenharia
Universidade da Beira Interior
2. Implicação na Integridade
Estrutural
Um sistema dinâmico sujeito à ação de uma força variável no
tempo (em termos de grandeza, direção ou posição) responderá
com uma variação do seu estado de equilíbrio.
Eventualmente esta resposta apresentará um caráter
alternativo/oscilatório e repetitivo no tempo, traduzindo-se
numa vibração.
As vibrações dos sistemas mecânicos podem implicar fatores
indesejáveis:
• Fadiga (do material).
• Desgaste/atrito/fretagem.
• Ruído.
• Fratura catastrófica do componente.
8
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa
Diminuição
dos níveis da
fiabilidade!
Faculdade de Engenharia
Universidade da Beira Interior
2. Implicação na Integridade
Estrutural
O objetivo da análise dinâmica é a determinação dos
deslocamentos, velocidades e acelerações e,
consequentemente, forças, tensões e deformações transmitidas
ou adquiridas pelos sistemas ou estruturas quando sujeitos a
solicitações dinâmicas.
Tacoma Narrows Bridge (1940)
9
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa
Faculdade de Engenharia
Universidade da Beira Interior
3. Conceitos Fundamentais
• Princípio da inércia (Galileu): uma partícula, num
referencial de inércia, quando não está a ser atuada por
quaisquer forças exteriores, tende a conservar o seu estado
de repouso ou de movimento uniforme retilíneo:
F 0 v const.
• Princípio da quantidade de movimento (ou momentum): uma
força aplicada a uma partícula iguala a taxa de variação no
tempo do seu momentum:
dp d mv para m constante
dv
F
F m
ma
dt
dt
dt
10
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa
Faculdade de Engenharia
Universidade da Beira Interior
3. Conceitos Fundamentais
• Princípio da ação e reação: se uma partícula i exercer uma
força sobre outra partícula j, Fij, então a partícula j exercerá
uma força de reação Fji igual e oposta sobre a partícula i:
Fij F ji
• Princípio da sobreposição: se existirem várias forças a atuar
simultaneamente sobre uma partícula, esta mover-se-á como
se sofresse a ação de uma força equivalente à soma vetorial
de todas as forças:
R Fi
i
11
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa
Faculdade de Engenharia
Universidade da Beira Interior
3. Conceitos Fundamentais
• Trabalho: se uma força F atuar sobre uma partícula cuja
posição no espaço é definida pelo vetor r, e se essa partícula
tiver um deslocamento elementar dr, diz-se que a força
realizou um trabalho elementar dW dado por:
dW F dr
Note-se que, em geral, o trabalho é uma grandeza que, sendo
função de propriedade de um sistema, não é uma função de
estado, i.e., o seu valor depende do caminho percorrido entre o
estado inicial e o final. Então, dW não é uma diferencial exata!
No entanto, no caso particular do trabalho realizado por uma
força conservativa (onde rotF=0), então o trabalho não
dependerá da trajetória, podendo ser traduzido por uma
diferencial exata.
12
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa
Faculdade de Engenharia
Universidade da Beira Interior
3. Conceitos Fundamentais
• Energia potencial gravítica: a relação entre o trabalho
realizado pelo peso de um corpo (força constante e
conservativa) e a energia potencial gravítica associada pode
ser determinada como:
WA1 A2 VA1 VA2 VA2 VA1
onde VA1 e VA2 representam a energia potencial nas posições A1 e
A2, respetivamente.
13
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa
Faculdade de Engenharia
Universidade da Beira Interior
3. Conceitos Fundamentais
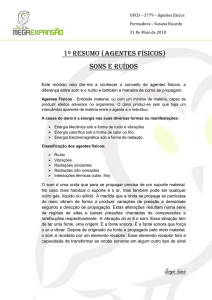
• Energia potencial elástica:
considere-se um corpo ligado a uma
estrutura fixa através de uma mola
com rigidez k (ver figura). Em (a) a
mola não está distendida. Quando se
desloca o corpo para a posição
representada em (b), a mola
distende-se do valor x1, exercendo
uma força no corpo que é oposta ao
deslocamento, i.e., F1=-kx1. Em (c)
teremos F2=-kx2 e numa posição
genérica intermédia F=-kx.
14
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa
Faculdade de Engenharia
Universidade da Beira Interior
3. Conceitos Fundamentais
O trabalho elementar realizado pela força exercida pela mola
quando o corpo se desloca uma distância dx é
dW Fdx
Como F=-kx, então
x2
dW kxdx W12 kxdx
x1
1 2 1 2
kx1 kx2
2
2
A energia potencial elástica acumulada pela mola é dada por
V
1 2
kx
2
Daqui se conclui que o trabalho é dado pela variação da energia
potencial elástica da mola.
15
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa
Faculdade de Engenharia
Universidade da Beira Interior
3. Conceitos Fundamentais
• Relação entre trabalho e energia cinética: a relação entre
estas duas grandezas pode ser definida como:
r2
Wr1 r2 dT T2 T1
r1
O trabalho realizado por uma força ao deslocar uma partícula de uma posição r 1
para outra r2 é igual à correspondente variação de energia cinética (T).
Note-se que esta expressão permite relacionar uma diferencial
não-exata com uma diferencial exata, pelo que facilmente
poderemos determinar o trabalho realizado por uma força ao
mover uma partícula de uma posição r1 para uma posição r2
através de uma função que só depende da velocidade em cada
uma destas posições, i.e., a energia cinética.
16
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa
Faculdade de Engenharia
Universidade da Beira Interior
3. Conceitos Fundamentais
• Princípio da conservação da energia: a taxa de variação do
trabalho das forças não-conservativas, ou seja, a potência
dissipada (ou fornecida) é igual à taxa de variação da energia
total do sistema.
Considerando uma força conservativa, podemos escrever:
dW F dr dV
Da relação entre o trabalho e a energia cinética:
dT dV d (T V ) 0
d
(T V ) 0 T V E const
dt
Nesta expressão, E traduz a energia total do sistema.
17
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa
Faculdade de Engenharia
Universidade da Beira Interior
3. Conceitos Fundamentais
Se considerarmos a ação conjunta de forças conservativas e nãoconservativas, i.e., considerando F=Fc+Fnc,, e fazendo o produto
interno com dr:
F dr Fc dr Fnc dr dT dV Fnc dr d (T V ) dE Fnc dr
Finalmente, dividindo ambos os membros por dt:
d
T V Fnc r
dt
18
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa
Faculdade de Engenharia
Universidade da Beira Interior
4. Tipos de Solicitações Dinâmicas
Existem dois tipos de cargas dinâmicas: periódicas e não
periódicas.
• Cargas periódicas: ocorrem em componentes que operem em
condições estáveis e a velocidade constante. Podem ser do
tipo harmónico ou não-harmónico.
19
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa
Faculdade de Engenharia
Universidade da Beira Interior
4. Tipos de Solicitações Dinâmicas
• Cargas não periódicas: ocorrem apenas em períodos curtos de
arranque, paragem e mudança de velocidade dos
equipamentos, tendo um caráter transitório.
20
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa
Faculdade de Engenharia
Universidade da Beira Interior
4. Tipos de Solicitações Dinâmicas
Pode ainda considerar-se a existência de 2 processos distintos
para avaliar a resposta dos sistemas face a solicitações
dinâmicas:
• Determinísticos – quando a variação da carga ao longo do
tempo for perfeitamente conhecida.
• Estocásticos – quando a variação da carga ao longo do tempo
não for perfeitamente conhecida, sendo necessário recorrer à
sua representação por métodos estocásticos (ex. cargas
aleatórias).
21
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa
Faculdade de Engenharia
Universidade da Beira Interior
5. Sistemas Vibratórios
Basicamente, para que ocorra a vibração de um sistema
mecânico é necessário o contributo de dois fatores
fundamentais: a inércia e as forças elásticas (de restituição).
No entanto, o comportamento real de um sistema vibratório
exige a consideração de um 3º elemento responsável pela
dissipação de energia: o amortecimento.
O mecanismo de vibração pressupõe o fornecimento de energia
através de uma força de excitação aplicada ao sistema.
22
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa
Faculdade de Engenharia
Universidade da Beira Interior
5. Sistemas Vibratórios
A vibração envolve a transferência de energia entre as seguintes
formas:
• Cinética – movimento de massa.
• Potencial – deformação da mola (com rigidez k e massa nula).
• Térmica – dissipação de energia sob a forma de calor no
amortecedor (com massa nula e constante de amortecimento
c).
23
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa
Faculdade de Engenharia
Universidade da Beira Interior
5. Sistemas Vibratórios
A figura abaixo ilustra os elementos do sistema vibratório linear.
24
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa
Faculdade de Engenharia
Universidade da Beira Interior
5. Sistemas Vibratórios
5.1. Inércia
No caso de um corpo em translação, a inércia é quantificada
pela sua massa.
Num corpo em rotação, a inércia corresponde ao momento de
inércia em relação ao eixo de rotação.
As forças de inércia estão relacionadas com as acelerações de
translação ou de rotação.
Por exemplo, num sistema linear
F mx
onde m é a massa em [kg].
Por exemplo, num sistema angular
M I
onde I é o momento de inércia em [kg.m].
25
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa
Faculdade de Engenharia
Universidade da Beira Interior
5. Sistemas Vibratórios
5.2. Forças de Restituição
As forças de restituição são forças que dependem da posição e
são conservativas.
Podem ser elásticas (molas, barras rígidas à flexão, etc.) ou
gravíticas (ex. movimento pendular).
Podem ter comportamento linear ou não.
Como exemplo de uma força que depende do deslocamento
temos a mola da figura
26
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa
Faculdade de Engenharia
Universidade da Beira Interior
5. Sistemas Vibratórios
5.2. Forças de Restituição
A mola sofre uma deformação que, na maioria das situações,
tem um comportamento elástico obedecendo à Lei de Hooke
F k x2 x1
(1)
onde k é a constante da mola ou a constante da rigidez, tendo
como unidades [N/m].
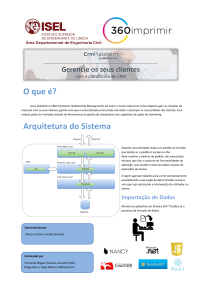
Por vezes usam-se combinações de molas sendo de particular
interesse as associações em série e em paralelo como as
indicadas na figura
27
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa
Faculdade de Engenharia
Universidade da Beira Interior
5. Sistemas Vibratórios
5.2. Forças de Restituição
No caso da associação de 2 molas em paralelo tem-se
Fp1 k1 x2 x1 Fp 2 k2 x2 x1
Para haver equilíbrio
Fp Fp1 Fp 2 Fp keq x2 x1
com
keq k1 k2
(2)
Logo, para n molas associadas em paralelo
n
keq ki
i 1
28
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa
Faculdade de Engenharia
Universidade da Beira Interior
5. Sistemas Vibratórios
5.2. Forças de Restituição
No caso da associação de 2 molas em série tem-se
Fs1 k1 x0 x1 Fs 2 k2 x2 x0
Neste caso tem-se
Fs Fs1 Fs 2 Fs keq x2 x1
com
1 1
keq
k1 k 2
1
(3)
Logo, para n molas associadas em série
n 1
keq
i 1 ki
29
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa
1
Faculdade de Engenharia
Universidade da Beira Interior
5. Sistemas Vibratórios
5.2. Forças de Restituição
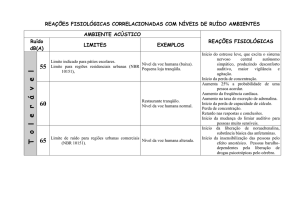
Exemplo 1.01: Modele o sistema representado na figura por um
bloco ligado a uma única mola com uma constante de rigidez
equivalente.
30
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa
Faculdade de Engenharia
Universidade da Beira Interior
5. Sistemas Vibratórios
5.3. Amortecimento
O amortecimento de um sistema vibratório é introduzido através
de componentes específicos, amortecedores, ou então resulta do
atrito entre os vários componentes do sistema.
No caso dos amortecedores viscosos, verifica-se uma variação
linear entre a força e a diferença das velocidades produzida nas
suas extremidades, obtendo-se a relação
F cx2 x1
(4)
Neste caso, a constante c representa o coeficiente de
amortecimento tendo como unidades [Ns/m].
31
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa
Faculdade de Engenharia
Universidade da Beira Interior
5. Sistemas Vibratórios
5.3. Amortecimento
De forma análoga às molas também os amortecedores poderão
ser associados em série ou paralelo,
resultando num ceq igual a, respetivamente,
e
32
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
1 1
ceq
c1 c2
1
(5)
ceq c1 c2
Pedro V. Gamboa
(6)
Faculdade de Engenharia
Universidade da Beira Interior
5. Sistemas Vibratórios
5.3. Amortecimento
Quando um sistema é excitado externamente num instante t=0,
por uma força ou deslocamento, o seu movimento dinâmico
toma o nome de vibração forçada.
Se após este instante inicial as perturbações externas deixam de
existir, o movimento oscilatório do sistema passa a ter o nome
de vibração livre.
Estas vibrações livres descrevem um comportamento natural
traduzido pelos modos naturais de vibração do sistema.
Com o efeito do amortecimento é expectável que as vibrações
livres tendem a parar até ao sistema ficar na sua posição de
equilíbrio estático.
33
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa
Faculdade de Engenharia
Universidade da Beira Interior
5. Sistemas Vibratórios
No caso de termos um sistema rotativo, as componentes do
sistema são:
I - momento de inércia
kt - rigidez da mola à torção
ct - coeficiente de amortecimento
- deslocamento angular
T(t) - momento excitador
34
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa
Faculdade de Engenharia
Universidade da Beira Interior
5. Sistemas Vibratórios
A tabela seguinte representa um resumo das diversas forças que
atuam tanto em sistemas retilíneos (lineares) como momentos
que atuam em sistemas rotativos:
Sistema Retilíneo
35
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Sistema Rotativo
Pedro V. Gamboa
Faculdade de Engenharia
Universidade da Beira Interior
5. Sistemas Vibratórios
5.4. Modelos de Sistemas e Graus de Liberdade
O número de graus de liberdade de um sistema é o número de
movimentos independentes que aquele pode assumir, sendo
esses movimentos representados através de coordenadas que
permitem definir a posição desse sistema em qualquer instante.
É comum usar a nomenclatura abaixo neste contexto:
• DOF – degrees of freedom
• SDOF – single degree of freedom
• MDOF – multiple degree of freedom
36
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa
Faculdade de Engenharia
Universidade da Beira Interior
5. Sistemas Vibratórios
5.4. Modelos de Sistemas e Graus de Liberdade
Um sistema com número finito de DOF é chamado sistema
discreto, ao passo que um sistema com um número infinito de
DOF é chamado sistema contínuo.
Muitos sistemas contínuos podem no entanto ser analisados com
uma precisão aceitável como sistemas discretos em função da
escolha do número de graus de liberdade.
37
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa
Faculdade de Engenharia
Universidade da Beira Interior
5. Sistemas Vibratórios
5.4. Modelos de Sistemas e Graus de Liberdade
Exemplo: Viga rígida sujeita à flexão.
• Um corpo rígido no espaço 3D terá 6 DOF – 3 rotações e 3
translações
• No plano 2D terá 3 DOF – 1 rotação e 2 translações
38
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa
Faculdade de Engenharia
Universidade da Beira Interior
5. Sistemas Vibratórios
5.4. Modelos de Sistemas e Graus de Liberdade
Exemplo: Duas barras.
• As barras separadas da Figura 5(a) têm 6 DOF
• As barras ligadas através de uma articulação, Figura 5(b),
passam a ter 4 DOF
39
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa
Faculdade de Engenharia
Universidade da Beira Interior
5. Sistemas Vibratórios
5.4. Modelos de Sistemas e Graus de Liberdade
Exemplo: 1 DOF.
• pistão movendo-se dentro de um cilindro de motor
alternativo
• movimento de um disco de turbina
• suspensão de um veículo automóvel (caso simplificado!)
40
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa
Faculdade de Engenharia
Universidade da Beira Interior
5. Sistemas Vibratórios
5.4. Modelos de Sistemas e Graus de Liberdade
Exemplo: 2 DOF.
41
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa
Faculdade de Engenharia
Universidade da Beira Interior
5. Sistemas Vibratórios
5.4. Modelos de Sistemas e Graus de Liberdade
Exemplo: 4 DOF.
42
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa
Faculdade de Engenharia
Universidade da Beira Interior