Simuladores de Direção e Velocidade do Vento
B.J.K.L.1.0
LETICIA IZABEL
E-mail: [email protected]
JUCÉLIA LOPES
E-mail: [email protected]
BIANCA SCARANTO
E-mail: [email protected]
KELLE SOARES
E-mail: [email protected]
Orientador
Sergio Candido
E-mail: [email protected]
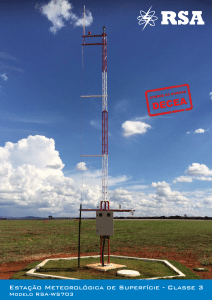
Centro Federal de Educação Tecnológica de Santa Catarina CEFET/SC.
Av. Mauro Ramos, 950 centro, Florianópolis -SC
CEP 88020-300
RESUMO: O projeto visa à construção de simuladores dos sensores de velocidade e direção do
vento para demonstração em sala de aula, aprimorando o aprendizado sobre o funcionamento destes
sensores. Para tanto usamos o princípio da eletromagnética e leis da eletrodinâmica que são
empregados nos anemômetros do tipo hélice, similar ao modelo 01056 Young. Nos testes realizados
com o simulador de velocidade, verificou-se a necessidade de inserir um núcleo de ferro para
ampliação do sinal gerado, no simulador de direção usamos um potenciômetro linear onde não
encontramos maiores dificuldades em sua montagem. Ao ligarmos os simuladores ao datalogger
CR800 obtivemos o esperado que era o reconhecimento das variáveis pelo equipamento.
Palavras-chaves: Vento; Simulador; DataLogger;
ABSTRACT: This project aims at building simulators of wind speed and direction to be used in
pedagogical demonstrations in order to optimize the student’s understanding of the functioning of
such sensors. Electromagnetism and electrodynamics laws used on helicoid-shaped wind monitors
similar to the 01056 Young model were applied. The tests ran with the wind speed simulator
showed that a core made of iron was needed to amplify the signal. As to the wind direction
simulator, a linear potentiometer was used and there were no problem regarding its mounting. The
expected result was reached when the simulators were connected to the datalogger CR800, that is,
the recognition of the variables by the equipment.
Key-words: Wind; Simulators; Datalogger.
1 INTRODUÇÃO
2 MATERIAIS E MÉTODOS
Uma estação meteorológica automática
possibilita
a
aquisição
dos
dados
meteorológicos automaticamente dentro de um
tempo pré-estabelecido. Este sistema é
composto por um conjunto de sensores, os quais
medem a cada instante, as variáveis
meteorológicas.
Esta informação é enviada para um
"DataLogger", que é a memória do sistema, o
qual, com base nos valores instantâneos
determina, as médias horárias dos elementos
meteorológicos medidos. Estes dados ficam
armazenados no "DataLogger", até serem
exportados por via telefônica , através de um
computador portátil, comunicação por satélite
ou outra forma conveniente de comunicação.
Com este trabalho desenvolvemos dois
simuladores, utilizamos como base dois
sensores utilizados nas estações automáticas o
de velocidade e o de direção do vento.
A escolha destes sensores deve-se ao
interesse dos autores deste projeto pelo seu
funcionamento, porém por motivos de custo
optou-se pela construção de um simulador dos
sensores em questão.
Pesquisas realizadas mostraram a
existência de um simulador de sistema vento
rotor,
(MONTAGEM
EXPERIMENTAL)
possuindo
o
mesmo
princípio
de
funcionamento, desenvolvido por este trabalho,
onde mostra um motor de corrente contínua,
controlado através de um microcomputador. Ao
contrário
do
simulador
apresentado
anteriormente, embora usando o mesmo
princípio de funcionamento, este trabalho tem
como objetivo construir simuladores dos
sensores de velocidade e direção do vento,
conectando-os diretamente ao datalogger.
Proporcionando um instrumento portátil, de
fácil manutenção, e robustez.
Este simulador será utilizado para fins
didáticos que se integrará como componente de
um Kit, aos demais simuladores construídos
pelos alunos do curso de Técnico em
Meteorologia. Sendo um instrumento de fácil
manuseio e manutenção para futuramente ser
utilizado em sala de aula.
A construção do simulador de vento
seguiu os princípios das leis da eletrodinâmica e
eletromagnética.
O simulador de velocidade do vento
baseia-se na Lei de Faraday, sobre
eletromagnetismo. Onde se observa que uma
bobina ao ser cortada por linhas de força de um
campo magnético faz aparecer, por indução,
uma diferença de potencial (ddp) em seus
terminais. Para tanto construímos um disco com
material isolante e dispomos três imãs sobre o
mesmo formando um rotor com seis pólos. O
rotor será movimentado por um motor de
corrente contínua (cc) que facilita o controle da
rotação, simulando a variação da velocidade do
vento sobre o sensor. Na construção da bobina
usamos 400 espiras de condutor de cobre
esmaltado com bitola 36 AWG. Esta bobina foi
instalada próxima ao rotor, o suficiente para
estabelecer a variação do campo magnético
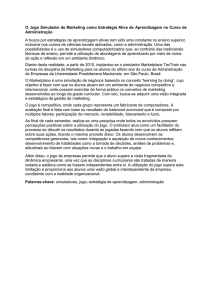
sobre a mesma. Testes realizados em laboratório
com o auxilio de um osciloscópio nos mostrou
que o sinal gerado era alternado e variava em
amplitude (tensão) e comprimento de onda
(freqüência) conforme a variação da velocidade
do motor. A alternância do sinal se dava em
virtude da influencia dos pólos norte e sul
gerando sinais de freqüência, esses sinais são
enviados para a leitura no datalogger. Para
melhor visualização do sinal gerado observe a
(Figura1).
Figura 1 - Gráfico de freqüência gerada pela a
rotação dos ímãs em frente à bobina.
O sinal recebido pelo DataLogger é a
freqüência do sinal que é determinada pelo
ângulo θ da hélice do anemômetro (Figura2),
θ
Então:
Figura 2: Hélice usado no anemômetro.
A freqüência do sensor é determinador pelo
movimento de revoluções do rotor (Mv), pelo
numero de pólos( P) dividido pelo tempo ( t).
(Equação 1)
F=Mv.P
t
(1)
F= Dp. p. P
cos θ
consideramos que Dp= 1 m Então:
F = 1.p .P
cos θ
Então a freqüência do equipamento será
terminada pela a seguinte equação:
Sendo :
Mv = rpm
t=s
F= Hz
F = p .P
cos θ
Se considerarmos do tempo seja de 1 segundo
(Equação 2), teremos que a freqüência é igual
movimento de revoluções do rotor(Mv) pelo
número de pólos( P). (Equação 3)
F=Mv.P
1
(2)
F= Mv.P (3)
n
Ф
Dp
Sabemos que Mv é determinado número de
rotações (n) e inversamente proporcional ao
perímetro (p). (Equação 4 )
Mv = n
p
(4)
Então a freqüência é igual a número de rotação
(n) e número de pólos(P) inversamente
proporcional ao perímetro (p).(Equação 5)
F = n .P
p
(5)
O número de rotação é determinador pelo
espaço percorrido das partícula de ar (Dp) que
inversamente proporcional ao co-seno do
ângulo da hélice (cos θ) .(Equação 6 )
n = Dp
cos θ
(6)
Figura 3: Relação entre o ângulo da hélice com o
numero de rotações do hélice.
A Freqüência gerada pelo sensor é
determinada pelo (cos ө) ângulo da hélice que é
inversamente proporcional ao perímetro da
hélice, multiplicado pelo numero de pólos.
O simulador de direção do vento tem
como base a 1° Lei de Ohm, aonde descreve
que a corrente elétrica que percorre um circuito
é diretamente proporcional à tensão aplicada e
inversamente proporcional a resistividade da
carga. A direção do vento utiliza um circuito em
série composto de um resistor fixo com objetivo
de evitar um curto e um resistor variável
(potenciômetro) que envia sinais distintos para
leitura do datalogger. Esses sinais variam de
acordo com a variação da resistência que
depende do posicionamento da grimpa (catavento) apresentando variações de tensão
determinando a direção do vento segundo a
programação no datalogger.
3 CIRCUITO E CONSTRUÇÃO
Os simuladores de direção e velocidade
do vento foram construídos baseando-se nos
princípios
da
eletrodinâmica
e
do
eletromagnetismo.
No simulador de velocidade, foi construída
uma bobina com 400 espirais (Figura 4) e uma
placa com 3 imãs de HD que contém seis pólos
(Figura 5), segundo o modelo 05106 Wind
Speed & Direction sensor Young. A conexão do
sensor é ligado no “DataLogger” (Figura 6),
uma na entrada terra (
) e outra na entrada de
sinal pulso (P1) .
Tratando-se de um simulador usamos
um motor de cc 12V/40mA que propicia um
fácil controle de velocidade aproximando ao
comportamento do vento. Para obter este
controle alimentamos com 12V e variamos a
corrente no circuito usando um potenciômetro
de 1K Ω. Para administrar a tensão sobre ele e
sendo assim controlando a rotação e freqüência
do instrumento. (Figura 7)
Figura 7: Circuito para controle da tensão
sobre o motor.
O simulador foi construído em uma
caixa para circuito como mostra a figura 8.
Figura 4: Bobina do sensor.
Figura 8: Simulador em Velocidade do
Vento.
Figura 5: Placa com imãs de HD.
Figura 6: Circuito do sensor de velocidade do vento.
No simulador de direção nos baseamos
na 1° lei de Ohm, foi construído um circuito
simples em série com potenciômetro linear
10kΩ e um resistor 1KΩ. O circuito é
alimentado com 2500 mV que será cedida pelo
datalogger (figura 9 e 10). O ponto máximo de
leitura do sensor é de 11KΩ e mínimo é 1KΩ,
então a cada 0,0305 KΩ de tensão varia 1° na
direção do vento. Sua conexão no “DataLogger”
uma é na entrada de alimentação(EX1), outra na
entrada Analógica simples(SE1), e outra na
entrada
.
Figura 9: Circuito do sensor de direção do vento.
Figura 11: DataLogger CR800.
Figura 10: Simulador de direção do vento
Na conexão dos simuladores de direção e
velocidade do vento junto ao “DataLogger
CR800” tem a seguinte comandos da tabela 1.
1-Tabela de conexão do simulador de
velocidade e direção do vento BJKL 1.0
Cor
Descrição
CR800
Sinal da velocidade
vermelho do Vento
P1
Sinal de referência da
Preto
velocidade do vento
Sinal da direção do
Verde
vento
SE1
Sinal de alimentação
do simulador de
Branco
direção do vento
EX1
Sinal de referência da
Azul
direção do vento
Figura 12: Teste realizado no simulador de direção
do vento.
Figura 13: Teste realizado no simulador de
velocidade do vento.
4 TESTES E RESULTADOS
No simulador de direção e velocidade
de vento foram realizados teste no “DataLogger
CR800” (Figura 11, 12 e 13), baseado no
anemômetro 05106 Wind Speed & Direction
sensor Young, utilizamos a programação Short
Cut (Figura 14) observamos que a resposta dos
simuladores estavam dentro do esperado, ou
seja semelhante aos sensores usados como base.
Figura 14: Programa Short Cut.
No simulador de direção, por possuir o
mesmo valor de tensão que o modelo usado,
obteve-se valores idênticos de tensão no
simulador.
No simulador de velocidade do vento
foram usados imãs de HD, foi preciso fazer um
ajuste, inserindo um núcleo de ferro no meio da
bobina (Figura 15) para aumentar a amplitude
da senóide do sinal (Figura 16) para alcançar o
valor desejado no ato da leitura no
“DataLogger”. Constatou-se que dependendo
do posicionamento da bobina em relação aos
imãs (Figura 17) obteve-se valores distintos de
velocidade máxima, ou seja, quanto mais
próximo a bobina em relação aos ímãs os
valores de velocidade são maiores e quanto
mais distantes os valores de velocidade são
menores.
Figura 15: Teste realizado inserindo um alicate para
representar um núcleo de ferro.
Figura 16: Teste realizado para localizar a posição da
bobina em relação aos ímas.
5 CONSIDERAÇÕES FINAIS
Fundamentados nos princípios físicos já
citados alcançamos os resultados positivos
dentro do proposto, ocorrendo um aprendizado
pessoal para cada integrante sobre os assuntos
apresentado com este estudo.
Os simuladores foram construídos na
prática, com uma concepção de um instrumento
portátil, robusta, fácil manuseio e baixo de custo
facilitando a integração a um a kit desenvolvido
no curso técnico de meteorologia e para que os
interessados tenham um maior entendimento.
Este será utilizado como material didático para
aprimorar o desenvolvimento e competência
profissional dos alunos do curso técnico de
meteorologia.
Os autores deste projeto fazem um
agradecimento á todos os que colaboraram para
o sucesso e crescimento pessoal e profissional
dos autores deste artigo.
6 REFERÊNCIA
Figura 16: Representação da senóide em um
osciloscópio.
ABREU, M.; MARCANTE, R.; CHEREM, L.
F. S. Movimento na atmosfera. Tópicos em
meio ambiente e ciências atmosféricas:
utilização de recursos multimídia para o ensino
médio e fundamental. Cachoeira Paulista:
Mamute Mídia, 2006. p. 11. ISBN 85-1700024-2. (INPE--/). Disponível em:
<http://urlib.net/sid.inpe.br/iris@1915/2005/11.
08.12.28>. Acesso em: 05 mar. 2008
BENDER, A; SBARDELOTTO, D; MAGNO,
W. Usando motores DC em experimentos de
física. Disponível em:
<http://www.scielo.br/pdf/rbef/v26n4/a15v26n4
.pdf>. Acesso em: 05 mar. 2008.
BROCK,F,V. Sistemas
Hidrologia. 18 Dez 2003.
de
Medição
em
MONTAGEM EXPERIMENTAL Disponível
em:
http://www.zanotel.com.br/~volmar/utilt/capit6.pdf. Acesso em: 31 mar. 2008.
NASCIMENTO, Fellype do. “Aplicações da lei
de Faraday à construção de um anemômetro”.
Disponível em :
<RFhttp://www.ifi.unicamp.br/~lunazzi/F530_F
590_F690_F809_F895/F809/F809_sem1_2006/
Fellype_Lisandro-RF.pdf>. Acesso em 05 mar.
2008.