Desenvolvimento de um manipulador robótico para procedimentos cirúrgicos laparoscópicos:
Contribuições da engenharia mecânica
Anderson Cardoso de França1 e Roderlei Camargo2
1
Engenheiro Mecânico, [email protected]
Mestre em Engenharia Mecânica, professor do UNISAL, Campinas, São José, [email protected],
2
Resumo – A quantidade de procedimentos cirúrgicos
minimamente invasivos cresce consideravelmente a cada
ano, e por sua vez, as tecnologias tendem a acompanhálos. A laparoscopia - cirurgia realizada através de
pequenas incisões no abdômen -, faz parte desses
procedimentos, e proporciona diversos benefícios com
sua utilização. Mas em contrapartida, ainda possui
problemas graves relacionados as lesões iatrogênicas,
causadas por movimentos involuntários dos cirurgiões,
afetando alguma parte dos órgãos no momento do
procedimento laparoscópico. Assim, desenvolveu-se um
manipulador robótico via sistema CAD 3D SolidWorks
2015, seguido da analise estrutural CAE, via método dos
elementos finitos, no intervalo de validação da lei de
Hooke. Também acoplou-se um mecanismo bielamanivela a partir do eixo roscado, para obter maior
precisão e segurança no momento do procedimento
laparoscópico. A cinemática resultante deste
instrumento e o suporte guia, oferecem ao médico
autonomia para trabalhar em qualquer grau de
liberdade, auxiliado por um sistema dinâmico que
proporciona controle na utilização do instrumento,
preservando assim a saúde do paciente e reduzindo os
riscos de lesões iatrogênicas.
Palavras-chave:
CAD/CAE,
Laparoscopia, Projeto de mecanismo
Manipulador,
Abstract – The number of minimally invasive surgical
procedures grows significantly each year, and in turn,
the technologies tend to follow them. Laparoscopy surgery performed through small incisions in the
abdomen -, is part of these procedures, and provides
several benefits with its use. However, on the other hand,
it still has serious problems relationship to the iatrogenic
injuries, caused by involuntary movements of the
surgeons, affecting some part of the organs at the time of
laparoscopic procedure. Thus, developed a robotic
manipulator via 3D SolidWorks CAD system 2015,
followed by CAE structural analysis via the finite element
method, in the validation range of Hooke's law. Also
engaged into a connecting rod-crank mechanism from
the threaded shaft, for greater accuracy and safety at the
laparoscopic procedure. The resulting kinematics of this
instrument and support guide, offer the doctor
The resulting cinematic of the instrument and support
guide, provides the physician autonomy to work in any
degree of freedom, aided by a dynamic system that
provides control in the use of the instrument, thereby
preserving patient health and reducing the risk of
iatrogenic injuries.
Keywords: CAD/CAE,
Mechanism design.
Manipulator,
Laparoscopy,
I. INTRODUÇÃO
Com o avanço da ciência e para buscar uma
longevidade e bem-estar para todos, unem-se as áreas das
ciências exatas e da saúde, para convalidar este quesito.
A medicina vem buscando utilizar técnicas que
garantam segurança e não comprometam a estética dos
pacientes; assim a frequência das cirurgias minimamente
invasivas aumentou substancialmente desde a sua
introdução. Este tipo de cirurgia tem como objetivo a
máxima preservação da anatomia com a mínima agressão
ao organismo, mas o suficiente para realizar o
procedimento cirúrgico.
Segundo Brentano (2015), [1], a laparoscopia é um
procedimento cirúrgico minimamente invasivo realizado
através de pequenas incisões. O método consiste em
observar o interior do abdômen através da introdução de
uma lente ótica pela parede abdominal, após insuflar a
cavidade com gás carbônico, e executar diagnósticos e/ou
procedimentos cirúrgicos. O período pós-operatório da
laparoscopia é menos doloroso em relação ao da cirurgia
convencional porque as incisões na parede abdominal são
menores. Assim, os benefícios da utilização desta técnica
incluem menor tempo de recuperação para o paciente e
menores danos a sua saúde geral.
Apesar dos benefícios, as cirurgias minimamente
invasivas exigem dos cirurgiões treinamento para
manusear os manipuladores cirúrgicos, uma boa
coordenação motora e uma visualização clara do
procedimento. Os manipuladores cirúrgicos executam
funções como cortar, dissecar, prender, sustentar, retrair
ou suturar durante os atos cirúrgicos.
Contudo, os manipuladores podem causar lesões
irreparáveis ao corpo humano devido a movimentos
involuntários dos cirurgiões, as chamadas lesões
iatrogênicas. Tais lesões podem gerar danos aos órgãos
©Revista Ciência e Tecnologia, v. 19, n. 34, p. 75 - 84, jan./jun. 2016 - ISSN: 2236-6733
do paciente, favorecendo o desenvolvimento de doenças
ou até mesmo levar o paciente a óbito, [2].
Neste contexto, este trabalho tem como
objetivos desenvolver um manipulador robótico, capaz
de atender todos os graus de liberdade necessários para a
realização dos procedimentos cirúrgicos; criar um
suporte guia para prover segurança aos movimentos do
médico; modelar o conjunto do manipulador robótico em
sistema CAD 3D; gerar a cadeia cinemática do
manipulador, considerando os aspectos da dinâmica
"biela-manivela" e analisar estruturalmente o
componente mais relevante via método dos elementos
finitos. Pode-se desta forma, utilizar o procedimento não
só para determinar o modelo cinemático do sistema, mas
também determinar o procedimento de controle das
trajetórias. Espera-se tornar a movimentação do
manipulador anatomicamente precisa em todas as
direções, sem riscos para o paciente, e deixando o médico
seguro em relação ao equipamento.
II. REFERENCIAL TEÓRICO
médicos no momento da ação cirúrgica, nos órgãos como
o intestino, estômago, vias respiratórias, vias biliares ou
até mesmo em artérias.
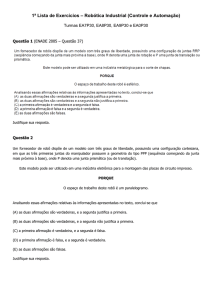
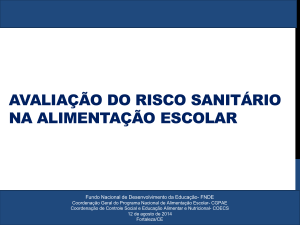
Figura 1 – Procedimento laparoscópico.
Fonte: Retirado de [4].
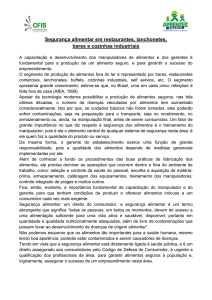
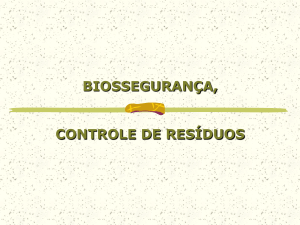
A Figura 2 ilustra uma lesão iatrogênica causada nas vias
biliares.
Figura 2 – Lesão iatrogênica em vias biliares.
Atualmente, com a evolução da tecnologia, pode-se
acessar praticamente todos os órgãos do corpo humano
através de cirurgias minimamente invasivas. Este novo
método cirúrgico, contribui para a solução de diversos
problemas encontrados na área médica.
A. Cirurgia laparoscópica
A laparoscopia é realizada a partir de uma
pequena incisão por onde é introduzido o laparoscópio.
Este aparelho consiste em um fino tubo de fibras óticas,
por meio do qual pode-se visualizar os órgãos internos e
realizar as intervenções diagnósticas ou cirúrgicas. Em
uma cirurgia laparoscópica, outras pequenas incisões são
necessárias para introdução dos instrumentos cirúrgicos.
Quando o procedimento é realizado no abdômen, certa
quantidade de gás carbônico é introduzida na da cavidade
abdominal, a fim de insuflá-la, criando assim um campo
de trabalho para se realizar a cirurgia. A cirurgia
laparoscópica tem a vantagem de ser minimamente
invasiva e ocasionar, desta forma, um menor trauma
cirúrgico, menor sangramento, menor taxa de infecções,
menor dor pós-operatória, e consequentemente uma
rápida
recuperação
pós-cirúrgica,
além
de
menores cicatrizes, [2]. Atualmente, praticamente todas
a cirurgias ginecológicas (cistos de ovário, dilatação das
trompas, torção de ovário, etc.) e urológicas podem ser
realizadas por laparoscopia, [3].
A Figura 1 ilustra um procedimento cirúrgico
laparoscópico no qual há a introdução da ferramenta
cirúrgica e de um laparoscópio.
A laparoscopia, assim como todo procedimento
cirúrgico, envolve alguns riscos, e o de maior gravidade
são os de lesões iatrogênicas, que são causadas por erros
Fonte: Retirado de [5].
As
lesões
iatrogênicas
estão
diminuindo
gradativamente com o avanço tecnológico, porém ainda
são pontos de atenção nos procedimentos cirúrgicos.
Problemas como falta de treinamento, fadiga e estresse
do cirurgião podem contribuir para causar este tipo de
lesão. A lesão iatrogênica é um fenômeno importante, e
um risco severo para os pacientes, podendo causar
morbidade ou óbito às suas vítimas, [6].
B. Sistema CAD
O sistema CAD (Computer Aided Design) é uma
ferramenta computacional frequentemente utilizada na
elaboração de projetos nas áreas de Engenharia,
Arquitetura, entre outras. O sistema CAD é um software
voltado ao desenho técnico, cujas ferramentas do sistema
©Revista Ciência e Tecnologia, v. 19, n. 34, p. 75 - 84, jan./jun. 2016 - ISSN: 2236-6733
contribuem para a elaboração do trabalho em questão
com uma menor possibilidade de erros, produção de
desenho ou mesmo de documentação escrita, além de
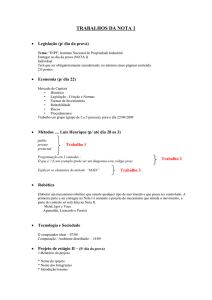
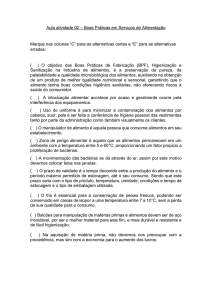
garantir a precisão nos cálculos de projeto, [7]. A Figura
3 ilustra o projeto desenvolvido no software CAD
SolidWorks 2015.
Figura 3 – Desenvolvimento do manipulador robótico.
O Método dos Elementos Finitos (MEF) é uma análise
que consiste na discretização de um meio contínuo,
preservando as mesmas propriedades originais do meio.
Esses elementos são descritos por equações diferenciais
e são resolvidos por modelos matemáticos, para que
sejam obtidos os resultados desejados. Quanto maior for
a quantidade de estruturas modeladas, mais precisos
serão os resultados, com o custo que a obtenção do
modelo será mais difícil e, consequentemente, a análise
dos resultados será mais complexa. Porém, baseado no
tipo de análise a ser criada, pode-se utilizar modelos mais
simplificados para obter-se os mesmos resultados
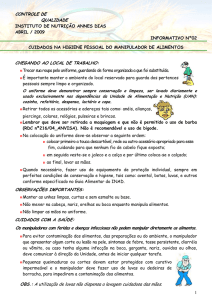
qualitativos, [9]. A Figura 5, ilustra uma análise
estrutural estática do apoio do manipulador robótico.
Figura 5 – Análise estrutural estática.
Fonte: Acervo do autor.
Fonte: Acervo do autor.
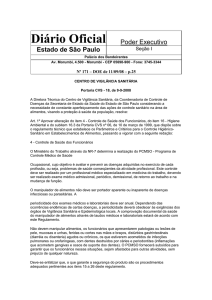
O SolidWorks é um software CAD 3D que permite
esboçar protótipos de projetos de máquinas, circuitos
eletrônicos e ferramentas que possam se materializar na
forma de desenhos tridimensionais (3D), aprimorando a
visualização da ideia, apontando possíveis erros que se
não observados em projeto, poderiam custar tempo e
dinheiro na execução falha do produto, [8].
A Figura 4, ilustra o projeto da guia suporte elaborado
utilizando o software CAD 3D SolidWorks.
Figura 4 – Suporte guia do manipulador robótico.
Após a determinação de todas as propriedades, realizase a aplicação das cargas necessárias e a análise dos
resultados. O comportamento de cada um dos elementos
é descrito pelos resultados apresentados e representarão
a distribuição das tensões e deformações do modelo.
D. Cinemática
Podemos definir o movimento como a variação da
posição do corpo em função do tempo. Dessa forma,
temos os Graus de Liberdade (GDL), que são os números
de parâmetros independentes necessários para se definir
a posição do corpo no espaço, sendo então primordiais
para a realização da medição exata dos objetos e pontos
em movimento. Os graus de liberdade são classificados
como as direções livres que podemos utilizar a
ferramenta, sem nenhuma interferência, [10].
No projeto desenvolvido, o manipulador robótico em
conjunto com o suporte guia resulta em até 5 graus de
liberdade conforme resume a Tabela 1.
Tabela 1 – Indicação dos graus de liberdade do manipulador robótico
auxiliado pelo suporte guia.
Fonte: Acervo do autor
C. Sistema CAE
O SolidWorks pode ser utilizado também como
software de CAE (Computer Aided Engineering) pelo
Método de Elementos Finitos (MEF), respondendo à
aplicação virtual de forças sobre a ferramenta. Uma
aproximação orientada permite-se obter razoável
performance da análise com o projeto sob condições
reais.
Eixos
Z
W
A
B
WB
Ângulos
0°
-45° 0° 45°
0° 360°
-15° 0° 15°
-60° 0° 60°
Z – Eixo linear;
W – Eixo do manipulador robótico;
A – Eixo rotacional do suporte guia;
©Revista Ciência e Tecnologia, v. 19, n. 34, p. 75 - 84, jan./jun. 2016 - ISSN: 2236-6733
B – Eixo regulagem da guia;
WB – Eixo W do manipulador robótico unido com eixo
B de regulagem da guia.
A Figura 6 ilustra o projeto do manipulador robótico
no suporte guia com destaque para os 5 graus de
liberdade na área de trabalho da ferramenta.
Figura 6 – Montagem manipulador robótico no suporte guia.
Esse mecanismo é muito utilizado na indústria
automotiva, sendo uma de suas principais aplicações o
uso nos motores de combustão interna. Nestes motores, a
barra é o pistão sobre o qual os gases exercem pressão,
que é transmitida à manivela por intermédio da biela. O
sistema biela-manivela emprega-se também, geralmente,
em compressores de ar, onde a manivela recebe o
movimento de rotação, por exemplo, de um motor
elétrico, sendo transformado em movimento retilíneo que
comprime o ar, [11].
III. MODELAGEM MATEMÁTICA
Para dimensionar o projeto, fez-se o estudo da
modelagem matemática, optando por elaborar
primeiramente o sistema biela-manivela. A partir dos
resultados obtidos, pode-se estruturar o comprimento da
rosca do eixo, e subsequente, calcular o deslocamento
angular do sistema do manipulador robótico.
A. Dimensionamento do sistema biela-manivela
Fonte: Acervo do autor.
De acordo com [12], para determinar o mecanismo
biela-manivela utilizado no manipulador robótico, os
conceitos ilustrados na Figura 8 devem ser observados.
A área de trabalho T do manipulador robótico tem, em
média, diâmetro de 165 mm a 45°, Entretanto, quando
utilizado em conjunto com o suporte guia, a área de
trabalho estende-se de 200mm a 230mm, dependendo da
profundidade utilizada no eixo Z.
Figura 8 – Sistema biela-manivela.
E. Dinâmica: Mecanismo biela-manivela
O mecanismo biela-manivela, é um sistema
dinâmico capaz de transformar o movimento circular em
movimento retilíneo. É composto por um elemento
giratório denominado manivela que está diretamente
ligado a biela, de forma que ao girar a manivela, a
biela avança ou retrocede, produzindo um movimento na
barra.
A Figura 7 ilustra a conversão de movimento circular
em movimento retilíneo.
Figura 7 – Sistema biela-manivela e conversão de movimento circular.
Fonte: Adaptado de [13].
em que:
S = Curso do sistema,
L = Comprimento da biela,
r = Comprimento da manivela (raio do percurso),
α = Ângulo da manivela,
β = Ângulo biela-manivela.
Com base nos parâmetros apresentados, o curso da
articulação é descrito por:
𝑆 = 𝑟 + 𝐿 − (𝑟 𝑐𝑜𝑠𝛼) − (𝐿 𝑐𝑜𝑠𝛽) ⇒
𝑆 = 𝑟(1 − cos 𝛼) + 𝐿(1 − 𝑐𝑜𝑠𝛽)
(1)
Aplicando-se a relação:
𝑟𝐿 =
Fonte: Acervo do autor
𝑠𝑒𝑛 𝛽
𝑠𝑒𝑛 𝛼
©Revista Ciência e Tecnologia, v. 19, n. 34, p. 75 - 84, jan./jun. 2016 - ISSN: 2236-6733
(2)
𝑟
B. Forças que agem sobre o pino da manivela
e adotando-se = 𝜆, tem-se:
𝐿
𝑠𝑒𝑛 𝛽 =
𝑟
𝐿
𝑠𝑒𝑛 𝛼 = 𝜆 𝑠𝑒𝑛 𝛼
(3)
Utilizando a Equação (3) na relação 𝑐𝑜𝑠 2 𝛽 = 1 −
𝑠𝑒𝑛2 𝛽, escreve-se:
𝑐𝑜𝑠 2 𝛽 = 1 − 𝜆2 𝑠𝑒𝑛2 𝛼
(4)
a qual implica que:
cos 𝛽 = √1 − 𝜆2 𝑠𝑒𝑛2 𝛼
(5)
A Equação (4) pode ser descrita em uma série de
Taylor na forma:
cos 𝛽 = √1 − 𝜆2 𝑠𝑒𝑛2 𝛼 = 1 −
1
2
𝜆2 𝑠𝑒𝑛2 𝛼 + ⋯
(6)
Desprezando os termos da série de ordem maior do que
2, tem-se que:
1 − cos 𝛽 =
1
2
𝜆2 𝑠𝑒𝑛2 𝛼.
(7)
Substituindo-se esta relação na Equação 1, obtém-se:
𝑆 = 𝑟(1 − cos 𝛼) +
𝐿𝜆2 𝑠𝑒𝑛2 𝛼
2
.
(8)
Para determinar o diâmetro adequado para os pinos do
sistema, utilizou-se a ferramenta referente ao Método dos
Elementos Finitos (MEF) no software SolidWorks. A
partir desta ferramenta, dada a força aplicada
verticalmente, é possível obter a análise estática do
sistema
A força aplicada verticalmente é resultante do cálculo
do torque multiplicado pela tangente do ângulo da rosca,
sendo representada por
𝑇 =𝐹∗𝑅
em que:
(9)
T = Torque
F = Força
R = Raio
De acordo com a Equação (8), define-se que a força
vertical 𝐹𝑣 como:
𝐹𝑣 = 𝑇 𝑡𝑔(60°)
(10)
Aplicando-se a força vertical da Equação (9) na análise
estática do SolidWorks, obtém-se o diâmetro adequado
dos pinos, com base na análise ilustrada na Figura 10.
Figura 10 – Análise estática do pino do sistema biela-manivela.
Utilizando 45° como o ângulo máximo para o
movimento do manipulador robótico, os parâmetros do
movimento do sistema biela-manivela, representados na
Figura 9, foram calculados para a sequência da simulação
cinemática. Consequentemente, o curso representado por
"𝑆" na Equação (7), foi determinado e estruturou-se o
manipulador robótico em termos dos respectivos
parâmetros. A Figura 9 ilustra a geometria tridimensional
formada pelos parâmetros de configuração do sistema
dinâmico acoplado.
Figura 9 – Sistema biela-manivela do manipulador robótico.
Fonte: Acervo do autor.
O resultado da análise evidenciou que as tensões são
da ordem de 1,35 × 10−9 N/m2. Os pontos mais críticos
são destacados em vermelho e referem-se a locais onde
podem ocorrer esforços maiores na estrutura do projeto.
Por serem escassos, tais pontos, conclui-se que o
diâmetro delimitado pelo software é adequado para
conceituar o sistema de mecanismo aqui proposto.
C. Determinação da rosca do sistema de transmissão
Para determinar a rosca apropriada para a utilização no
eixo interno roscado na transmissão do movimento
Fonte: Acervo do autor
©Revista Ciência e Tecnologia, v. 19, n. 34, p. 75 - 84, jan./jun. 2016 - ISSN: 2236-6733
rotacional para o movimento retilíneo, definiu-se a
seguinte relação:
𝐴𝑡 =
𝜋 𝑑3 +𝑑2 2
4
[
2
]
(11)
em que 𝐴𝑡 é a área de tensão a tração.
Na Equação (10), "𝑑2 " e "𝑑3 “são diâmetros associados
a roscas ISO tais que 𝑑3 = 𝑑 − 1,2268 𝑃 e 𝑑2 = 𝑑 −
0,6495 𝑃, sendo que “𝑑" é o diâmetro nominal e "𝑃" é o
passo ou distância axial entre duas roscas adjacentes.
Logo, a Equação (10) pode ser reescrita como:
As roscas com as classes de resistência 5.8 e 6.8
normalmente são confeccionados de aço com baixo ou
médio teor de carbono. Para as roscas com as classes de
resistência 8.8, 10.9 e 12.9 o aço deve ser médio carbono
ou aço ligado, o que confere a este aço, propriedades dos
componentes próprias para tratamentos térmicos,
visando o endurecimento da superfície ou mesmo o
próprio núcleo.
A Figura 12 ilustra o eixo roscado utilizado no sistema
dinâmico.
Figura 12 – Mecanismo dinâmico do manipulador robótico.
𝐴𝑡 = 0,7854 [𝑑 − (0,9382 𝑃]2 .
(12)
1
Substituindo 𝑃 = , sendo "𝑛" o número de roscas por
𝑛
polegada (ANSI) ou milímetro (ISO), tem-se
𝐴𝑡 = 0,7854 [𝑑 − (
0,9382
𝑛
2
)]
(13)
na qual "𝑑" e "𝑛" são informados, respectivamente, em
milímetros e em roscas por milímetro.
A Figura 11 ilustra o perfil de rosca métrica que foi
utilizada no manipulador robótico.
D.
Figura 11 – Ilustração de um perfil de rosca métrica.
Fonte: Retirado de [13].
Outra característica que deve ser analisada em
relação à determinação das roscas é o Limite de
Resistência à Tração (LRT). O LRT refere-se à força
axial aplicada ou tração pura, a partir do qual pode-se
convalidar que a rosca utilizada não sofrerá danos com a
força utilizada no sistema de transmissão de movimentos.
Matematicamente, o LRT é especificado como:
𝐿𝑅𝑇 =
Fonte: Acerto do autor.
𝐹𝑣
(14)
𝐴𝑡
A especificação ISO 898 Parte I, determina valores
mínimos para o Limite de Resistência à Tração (LRT),
segundo sua classe de resistência, conforme a Tabela 2.
Deslocamento angular do manipulador robótico
Para definir o deslocamento angular da ferramenta,
calcula-se o curso 𝑆 do sistema biela-manivela (Equação
7) e a rosca adequada do eixo interno para suportar a
carga axial. A partir destas informações, determina-se a
proporção adequada para que o ângulo final do
manipulador seja atingido.
As roscas deslocam-se através do passo “𝑃": isto
significa que a cada volta completa, movimenta-se em
termos de translação, o valor do deslocamento de um
passo.
Desta forma, descreve-se o deslocamento angular do
manipulador, como descrito por (15):
𝐷𝑎 =
𝐴𝑓 𝑃
𝑆
(15)
em que:
𝐷𝑎 = Deslocamento angular por volta;
𝐴𝑓 = Ângulo final;
𝑆 = Curso;
𝑃 = Passo
Tabela 2 – Valores de limite de resistência a tração (LRT).
Classe
LRT
(min)
5.8
540
MPa
6.8
600
MPa
8.8
800
Mpa
Fonte: Retirado de [14].
10.9
1040
MPa
12.9
1220
MPa
Com isto, pode-se determinar, o ângulo que o
manipulador se desloca, a cada movimento rotacional do
flange de ajuste. Existe uma marcação em forma de
graduação no flange, como forma de visualização gráfica
do ângulo formado.
©Revista Ciência e Tecnologia, v. 19, n. 34, p. 75 - 84, jan./jun. 2016 - ISSN: 2236-6733
A Figura 13 ilustra a graduação determinada para o
manipulador robótico.
Figura 13 – Graduação determinada para o manipulador robótico.
eixo, que aciona o mecanismo de forma longitudinal,
num movimento de translação.
A Figura 14 ilustra o sistema do eixo roscado, em corte
total, evidenciando os aspectos cinemáticos do sistema
dinâmico.
Figura 14 – Sistema de movimento do eixo roscado para o mecanismo
biela-manivela.
Fonte: Acervo do autor.
IV. METODOLOGIA
Quanto à natureza dos dados, a metodologia assume
um caráter qualitativo, pois trata-se de um componente
mecânico, composto por mecanismo de articulação que
propicia maior liberdade ao procedimento abordado neste
trabalho.
No que se refere ao delineamento, a metodologia
assume uma abordagem conduzida ao estudo de caso, em
que será demonstrado via projeto CAD, analisado através
de elementos finitos, simulação computacional virtual e
física, para a comprovação do êxito de um produto
direcionado para fins cirúrgicos destinado ao uso
exclusivo na laparoscopia.
A habilidade requerida pelo cirurgião para orientar a
extremidade da ferramenta pode ser obtida através de
mecanismos de transmissão, que transformam
movimentos de rotação em movimentos retilíneos,
inseridos no manipulador e através de um suporte guia,
fixado ao corpo do paciente. Este suporte guia é para
garantir que não haja movimentação do corpo humano,
durante os procedimentos cirúrgicos.
A complexidade cinemática deste tipo de mecanismo,
justifica a aplicação de ferramentas de análise propostas,
das quais desenvolveu-se um manipulador robótico, para
acesso ao abdômen, sem a introdução das mãos por parte
do médico cirurgião.
O projeto iniciou-se com a elaboração de um sistema
que fosse capaz de transmitir movimentos dentro do
corpo do paciente e, por isso, foi utilizado o sistema
biela-manivela.
Utilizando-se o software CAD 3D SolidWorks iniciouse o desenho do mecanismo biela-manivela que para seu
funcionamento necessitava de um movimento retilíneo
para acioná-lo. Com isso, criou-se um sistema de
transformação de movimentos que a partir de um eixo
roscado, o movimento da rosca é transmitido para um
Fonte: Acervo do autor.
O sistema dinâmico possibilitou o projeto da rosca
adequada para suportar a tração do movimento
rotacional. Este movimento é resultante do giro do flange
de ajuste, que é responsável pela regulagem do ângulo do
manipulador.
Baseando-se no estudo científico sobre a cirurgia
laparoscópica, constatou-se que as cirurgias são
executadas com abertura de um corte de 10 a 15 mm de
comprimento, elaborou-se a estrutura externa do
manipulador robótico com 10 mm de diâmetro.
No que se refere ao controle dos movimentos do
manipulador robótico no procedimento cirúrgico, para
evitar as lesões iatrogênicas, foi elaborado um suporte
guia, que posiciona o manipulador na posição desejada
utilizando como base o próprio corpo do paciente.
A Figura 15 ilustra o suporte guia, preso ao corpo do
paciente, por uma espécie de cinta, que envolve todo o
corpo humano, na região da futura cirurgia. Isto garante
rigidez estrutural do conjunto do manipulador, e evita
possíveis desalinhamentos, durante a operação.
Figura 15 – Suporte guia preso ao corpo do ser humano.
Fonte: Acervo do autor.
Este acessório é de extrema importância para o
funcionamento do manipulador robótico, uma vez que
direciona a ferramenta para o local do procedimento
cirúrgico e permite que esta direção seja fixada,
©Revista Ciência e Tecnologia, v. 19, n. 34, p. 75 - 84, jan./jun. 2016 - ISSN: 2236-6733
impedindo que movimentos involuntários do médico
prejudique a precisão da cirurgia.
O suporte guia possui uma bucha descartável que é
utilizada para que não haja contato direto do manipulador
com o suporte guia. Dessa maneira, todos os
equipamentos propostos podem ser reutilizados com
segurança e assepsia.
A Figura 16 ilustra a posição de fixação da bucha
descartável do suporte guia.
A Figura 18 denota as travas de segurança utilizadas
no suporte guia.
Figura 18 – Travas do suporte guia.
Figura 16 – Bucha descartável do suporte guia.
Fonte: Acervo do autor.
Fonte: Acervo do autor.
Para fixar o suporte guia no corpo do paciente, foi
desenvolvida uma cinta, que é presa ao redor do corpo do
paciente que estará imóvel no momento do procedimento
cirúrgico. O manipulador possui também a ponta
intercambiável, de forma que o médico cirurgião pode
optar pelo tipo de ferramenta que lhe parecer adequada,
de acordo com o procedimento cirúrgico.
A Figura 17 ilustra a ponta intercambiável do
manipulador, que neste caso, assemelha-se a um bisturi
cirúrgico.
Figura 17 – Ponta intercambiável do manipulador robótico.
O tamanho da incisão realizada no corpo do paciente,
que, em geral, é de 10 a 15 mm, for considerada para o
dimensionamento do instrumento, que, por sua vez,
trabalha dentro desta margem de abertura.
O material adequado para fabricação deste
instrumento deve ser o aço inoxidável martensítico do
tipo AISI-420, que não é corrosivo e evita perda do corte
ou quebra durante o procedimento cirúrgico.
V.
ESTUDO DE CASO: DESENVOLVIMENTO DE UM
MANIPULADOR ROBÓTICO PARA PROCEDIMENTOS
CIRÚRGICOS LAPAROSCÓPICOS
Após a elaboração e criação dos modelos no software
CAD 3D SolidWorks, utilizou-se um corpo humano em
escala real, como ilustra a Figura 19. Este procedimento
faz parte de um protocolo da engenharia mecânica,
denominado de representação gráfica de sistemas
mecânicos, em verdadeira grandeza.
Figura 19 – Montagem do projeto no corpo humano.
Fonte: Acervo do autor.
O suporte guia também possui travas de segurança,
que garantem que o manipulador robótico esteja fixo,
com ausência de movimento, durante o procedimento
cirúrgico a ser realizado no paciente.
Desta forma, garante-se que não exista nenhum grau de
liberdade, que possa comprometer a precisão final de
posicionamento do bisturi cirúrgico.
Fonte: Acervo do autor.
Desenvolveu-se um protótipo físico do equipamento
em alumínio, para exemplificar o uso real do
manipulador, em um corpo humano.
©Revista Ciência e Tecnologia, v. 19, n. 34, p. 75 - 84, jan./jun. 2016 - ISSN: 2236-6733
A Figura 20 ilustra as peças manufaturadas em material
alumínio, do manipulador robótico.
Figura 20 – Peças do protótipo do manipulador robótico.
escolha, a ponta adequada para cada tipo de
procedimento cirúrgico a ser realizado.
A Figura 22 ilustra o manipulador com a haste para
segurar, e a ponta intercambiável proposta.
Figura 22 – Manipulador com a haste para segurar e a ponta
intercambiável.
Fonte: Acervo do autor.
O sistema completo transfere os movimentos da
posição do cirurgião até o local da incisão, tendo como
base dos movimentos a superfície da pele do paciente.
A saber, o eixo roscado acopla-se ao eixo interno que
transmite o movimento rotacional da rosca, convertendoo em movimento linear. O sistema biela-manivela, por
sua vez, recebe esse movimento e o converte em
movimento angular, permitindo atingir até 45° de
inclinação. Toda transmissão inicia-se no flange de
ajuste, onde pode-se ajustar o ângulo desejado da ponta
da ferramenta.
A Figura 21 ilustra o movimento de translação angular,
transmitido pelo sistema biela-manivela, o qual é oriundo
de um movimento circular do cabeçote.
Figura 21 – Movimento angular do manipulador robótico.
Fonte: Acervo do autor.
Para o uso do manipulador robótico, desenvolveu-se o
suporte guia, que é utilizado para garantir que o
manipulador não sofra desvios de trajetória, garantindo a
segurança e precisão do procedimento cirúrgico. A
fabricação do suporte guia foi dividida para que o
funcionamento de cada grau de liberdade seja regulado
separadamente. O suporte guia possui 3 tipos de ajustes
que direcionam o manipulador robótico ao local
estipulado. Para cada ajuste existe uma trava de
segurança que garante a precisão da ferramenta na
direção desejada.
A Figura 23 ilustra separadamente, as peças que fazem
parte do suporte guia.
Figura 23 – Peças para montagem do suporte guia.
Fonte: Acervo do autor.
Para utilizar o manipulador foi desenvolvida uma haste
para segurar o instrumento, e movimentá-lo com maior
facilidade. Afim de tornar o projeto mais versátil,
optou-se por fazer a ponta da ferramenta intercambiável.
Desta forma, pode-se optar com mais liberdade de
Fonte: Acervo do autor.
©Revista Ciência e Tecnologia, v. 19, n. 34, p. 75 - 84, jan./jun. 2016 - ISSN: 2236-6733
Devido à necessidade de completa esterilização dos
instrumentos cirúrgicos foi criada uma bucha
descartável, que evita o contato direto entre o
manipulador robótico e o suporte guia. Desta forma, após
cada procedimento, basta que a bucha seja substituída,
não sendo necessária a substituição do suporte guia ou a
esterilização do mesmo.
A Figura 24 ilustra a montagem do suporte guia e a
bucha descartável.
Figura 24 – Montagem do suporte guia e a bucha descartável.
Fonte: Acervo do autor.
O suporte guia montado é preso ao corpo do paciente
direcionado ao local da incisão e o manipulador robótico
é introduzido na bucha descartável no centro do suporte.
VI. CONCLUSÕES
O desenvolvimento do manipulador robótico permite
uma maior abrangência de área de trabalho no corpo do
paciente, além de atender os graus de liberdade
necessários e possibilitar a troca de pontas utilizadas no
procedimento cirúrgico laparoscópico.
Quanto ao suporte guia, este permite controlar o
manipulador robótico e oferecer precisão aos
movimentos do médico, podendo evitar possíveis lesões
iatrogênicas.
A partir das ferramentas do software SolidWorks CAD
3D foi elaborado o projeto e a cadeia cinemática pela
qual, através de análises estruturais, foram
dimensionados os componentes mais relevantes da
ferramenta via método dos elementos finitos.
Este trabalho pode servir de base para projetos futuros,
que visem à melhoria nos procedimentos cirúrgicos
laparoscópicos, permitindo somar à experiência dos
cirurgiões condições mais precisas de manipulações com
os instrumentos e possibilitar menores riscos aos
pacientes.
<http://www.abcdasaude.com.br/cirurgiageral/cirurgia-laparoscopica>. Acesso em: 02/08/15.
[2] PADILHA, K. G., Considerações sobre as
ocorrências iatrogênicas na assistência à saúde:
dificuldades inerentes ao estudo do tema, Revista da
Escola de Enfermagem da USP, v. 35, n. 3, São Paulo,
2001.
[3] COLOMBO, Jr., J. R., Haber, G. P, Rubinstein, M.,
Gill, I. S., Laparoscopic Surgery in Urological
Oncology: Brief Overview, Braz J Urol, v. 32, n.5, p.
504-512, 2006.
[4] RUBINSTEIN, M., Laparoscopia. Ohio, EUA, 2015.
Disponível
em:
<http://mauriciorubinstein.com.br/laparoscopia>.
Acesso em 25 de agosto de 2015.
[5] SALVALAGGIO, P. R., Lesão Iatrogênica da Via
Biliar, São Paulo, 2011. Disponível em
<http://pt.slideshare.net/psalvalaggio/ev-bset20119802007>. Acesso em 21 de Outubro de 2015.
[6] SALIM, M. T., CUTAIT, R., Complicações da
cirurgia videolaparoscópica no tratamento de doenças
da vesícula e vias biliares, ISSN 0102 6720, v. 21, n. 4,
p. 153-157, 2008.
[7] KANDLER, A. P., REBELATTO, C., Sistema
CAD/CAM:
Uma
visão
contemporânea.
Florianópolis: Editora Unoesc, p. 25-31, 2014.
[8] WEINFURTER, D. V., Blumenau, Customização
para acrescentar atributos em sólidos do
SolidWorks. Monografia, p. 38-41 Blumenau:
Universidade Regional de Blumenau, Centro de
Ciências Exatas e Naturais, 2003.
[9] LOTTI, R.S., MACHADO, A. W., MAZZIEIRO, E.
T., LANDRE JR, J., Aplicabilidade científica do
método dos elementos finitos. R Dental Press Ortodon
Ortop Facial, v. 11, n. 2, p. 35-43, 2006.
[10] NORTON, R. L., Cinemática e Dinâmica dos
Mecanismos. Porto Alegre: Bookman Companhia
Editora Ltda., 2009.
[11] TENENBAUM, R. A., Dinâmica Aplicada. São
Paulo: Editora Manole Ltda., v. 3, 2006.
[12] GRAY, G. L., COSTANZO, F., PLESHA, M. P.,
Mecânica para Engenharia: Dinâmica. Porto
Alegre: Bookman Companhia Editora Ltda., 2014.
[13] CAMARGO, R., Dinâmica das Máquinas, 2. Ed.,
Campinas, p. 33-63, 2012.
[14] Revista do Parafuso. Disponível em:
<www.revistadoparafuso.com.br>. Acesso em 20 de
Setembro de 2015.
[13]
SolidWORKS.
Disponível
em
<www.solidworks.com.br>. Acesso em 20 de Agosto
de 2015.
REFERÊNCIAS
[1] BRENTANO, L., Cirurgia laparoscópica. São Paulo,
2015.
Disponível
em
©Revista Ciência e Tecnologia, v. 19, n. 34, p. 75 - 84, jan./jun. 2016 - ISSN: 2236-6733