Universidade Tecnológica Federal do Paraná
Tecnologia em Automação Industrial
AI-34D Instrumentação Industrial
Física
Dinâmica de Rotação
Profa Daniele Toniolo Dias F. Rosa
http://paginapessoal.utfpr.edu.br/danieletdias
[email protected]
Sumário
• Velocidade angular e aceleração angular
• Relações entre grandezas rotacionais e
translacionais
• Energia cinética rotacional
• Torque e o produto vetorial
• Movimento angular
• Conservação do momento angular
• Aplicações.
• Estudando os parâmetros que caracterizam a
dinâmica de rotação de um sistema de
partículas obtêm-se informações importantes
sobre a natureza da velocidade de rotação
Somos cercados completamente pelo movimento de rotação...
• Terra, planetas e galáxias
• Elétrons e prótons
• Pião
• Sistema de engrenagens
• Rodas e ponteiros
• Hélices e rotores
• Saltos ornamentais e acrobatas
Movimento translacional e rotacional...
Velocidade angular e aceleração
angular
• Começamos no estudo do movimento translacional
definindo os termos posição, velocidade e
aceleração. Por exemplo, localizamos uma partícula
no espaço unidimensional com a variável x.
• Pensemos agora sobre um corpo em rotação: Como
você descreveria sua posição nesse movimento
rotacional?
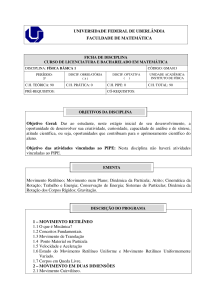
• Considere um corpo plano girando ao redor de um eixo
fixo que é perpendicular ao corpo e passa pelo ponto O
Figura 1
• Observe que uma partícula sobre o corpo, indicada
pelo ponto preto está a uma distância r da origem e
gira ao redor de O em um círculo de raio r (toda
partícula no corpo realiza movimento circular o redor
de O).
• É conveniente representar a posição da partícula com
suas coordenadas polares: (r, ).
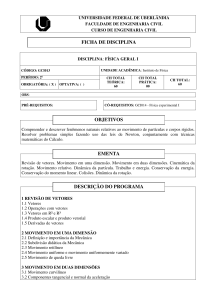
• Quando uma partícula sobre o corpo movimenta-se ao
longo do círculo de raio r a partir do eixo x positivo
(=0) até o ponto P, ela se desloca por um arco de
comprimento s, que está relacionado com pela
relação:
(1.a)
(1.b)
• O ângulo é a razão entre um comprimento de arco e o
raio do círculo, portanto é um número puro.
• Contudo, é comum dizer-se que a unidade de é o
radiano (rad).
• Um radiano é o ângulo submetido por um
comprimento de arco igual ao raio do arco. Como a
circunferência de um círculo mede 2r, segue-se que
3600 correspondem a um ângulo de 2r/r rad, ou 2
rad.
• Portanto, 1 rad=3600/ 257,30. Para converter um
ângulo em graus para um ângulo em radianos podemos
utilizar o fato de que 2 rad=3600, ou rad=1800 ,
portanto:
Ex: 600 é igual a /3 rad, e 450 é igual a /4 rad
Figura 2
• Na Figura 2 quando a partícula vai de P para Q em um
tempo t, o raio vetor percorre um ângulo de =2-1
(deslocamento angular).
• O número de revoluções que a partícula realiza em um
intervalo de tempo é o deslocamento angular durante
o intervalo de tempo dividido por 2.
• Definimos a velocidade angular média (ômega) como
a razão do deslocamento angular para o intervalo de
tempo t :
(2)
• Por analogia com a velocidade translacional, a
velocidade angular instantânea é definida como o
limite da razão (2) quando t se aproxima de zero:
(3)
• A velocidade angular tem unidade de rad/s (ou s-1, pois os
radianos não são dimensionais). Consideramos como +
quando estiver aumentando (sentido anti-horário)...
• Se a velocidade angular instantânea de uma partícula
muda de 1 para 2 no intervalo de tempo t, a
partícula tem uma aceleração angular. A aceleração
angular média (alfa) de uma partícula em movimento
em uma trajetória circular é definida como a razão da
variação na velocidade angular no intervalo de tempo
t :
(4)
• Por analogia, a aceleração angular instantânea :
(5)
• A aceleração angular tem unidade de rad/s2 (ou s-2).
• Para rotação ao redor de um eixo fixo, toda partícula de
um corpo rígido tem a mesma velocidade angular e a
mesma aceleração angular.
• Isto é, as grandezas e que discutimos para
partículas caracterizam o movimento rotacional do
corpo rígido inteiro.
• Para determinar o sentido do vetor velocidade angular
(que até então utilizamos em módulo) utiliza-se a regra
da mão direita.
• Os quatro dedos da mão direita curvam-se na direção
de rotação. O polegar estendido da mão direita aponta
na direção de . Em que a direção é a direção do eixo
de rotação.
Natureza vetorial
• Todas as grandezas lineares podem ser substituídas
pelas grandezas angulares de tal forma que podemos
escrever as equações angulares a partir das lineares.
Tabela 1
Fórmula
(movimento translacional)
Variáveis
x
v0
0
v
a
Fórmula
(movimento rotacional)
Movimento rotacional e translacional...
Relações entre grandezas rotacionais
e translacionais
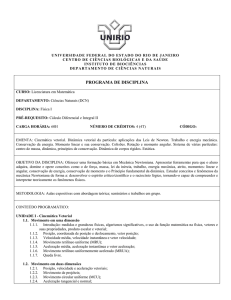
• Considere uma partícula sobre um corpo rígido em
rotação, deslocando-se em um círculo de raio r ao
redor do eixo z, como na Figura 3.
• Como a partícula descreve uma
trajetória circular, seu vetor
velocidade translacional v é
sempre tangente à trajetória, por
isso é frequentemente denominada
velocidade tangencial (periférica).
Figura 3
• O módulo da velocidade tangencial da partícula é, por
definição a velocidade escalar tangencial, dada por
v=ds/dt, em que s é a distância percorrida pela
partícula ao longo da trajetória circular.
• Lembrando da Eq. (1a) que s=r (em que r é constante):
(6)
• A velocidade escalar tangencial da partícula é igual à
distância da partícula até o eixo de rotação multiplicado
pela velocidade angular da partícula.
• A velocidade de um ponto devido à rotação (v=r) está
associada estritamente à rotação.
• Devemos imaginar o corpo sem movimento de
translação.
• Essa é a velocidade percorrida por alguém que observa
a partícula ou corpo em rotação em torno do eixo.
• Podemos relacionar a aceleração angular da partícula à
sua aceleração tangencial at (que é a componente da
aceleração tangente à trajetória do movimento)
fazendo a derivada temporal de v:
(7)
• Sabe-se que uma partícula girando em uma trajetória
circular tem uma aceleração centrípeta, ou radial, de
módulo v2/r direcionada para o centro de rotação (ver a
Figura 4).
• Como v=r, podemos expressar a
aceleração centrípeta da partícula
em termos da velocidade angular
como:
(8)
Figura 4
• A aceleração translacional total da partícula é a=at+ar.
O módulo da aceleração translacional total da partícula
é, portanto, dada por:
(9)
Movimento rotacional...
Energia cinética rotacional
• Supondo um corpo rígido que gira ao redor do eixo fixo
z com velocidade angular (Figura 5).
• Cada partícula do corpo rígido
está em movimento e tem, assim
uma energia cinética, determinada
por sua massa e velocidade escalar
tangencial.
• A -iésima partícula tem massa mi
e velocidade tangencial vi.
Figura 5
• Se a massa da -iésima partícula é mi e sua velocidade
tangencial é vi, a energia cinética dessa partícula é:
• A energia cinética total KR será a soma das energias
cinéticas das partículas individuais:
é comum a todas as partículas
• A grandeza entre parênteses é chamada momento de
inércia I do corpo rígido:
(10)
• Podemos expressar a energia cinética:
(11)
• O momento de inércia tem dimensões ML2 (kg m2 no
SI).
• O momento de inércia é uma medida da resistência à
variação na velocidade angular de um sistema (mesmo
papel da massa no movimento translacional).
Entretanto ele depende além da massa também de
como a massa está distribuída ao redor do eixo de
rotação.
• Dependendo do eixo em torno do qual um objeto gira,
seu momento de inércia varia, apesar da massa ser a
mesma.
• O momento de inércia sempre é relativo a um eixo de
rotação.
Movimento rotacional...
Torque e produto vetorial
• Quando uma força é exercida sobre um corpo rígido
que pode girar em torno de um eixo e a linha de ação
da força não passa através do ponto de apoio no eixo, o
corpo tende a girar ao redor desse eixo.
• Por exemplo quando você empurra uma
porta, aplica uma força sobre a mesma,
como consequência a porta gira ao redor
de um eixo passando pelas dobradiças.
• A tendência de uma força em girar um corpo ao redor
de algum eixo é medida por uma grandeza vetorial
chamada torque.
• O torque é a causa das variações no movimento
rotacional e é análogo à força, que causa variações no
movimento translacional. Definimos o torque (tau)
que resulta da força F com a expressão:
𝜏 =𝑟×𝐹
Lembrando
produto vetorial:
(12)
Área do
paralelogramo
• O módulo do vetor é:
𝜏 = 𝑟𝐹𝑠𝑒𝑛∅
(13)
• É importante reconhecer que o
torque é definido apenas quando
é especificado um eixo de
referência, a partir do qual a
distância r é determinada.
• Note na figura que a componente
Fcos paralelo a r não causa uma
rotação ao redor do ponto de apoio,
pois sua linha de ação passa
exatamente pelo ponto de apoio
no eixo.
Regra da mão direita
• Você não pode abrir uma porta empurrando as dobradiças!
• Experimente fechar uma porta empurrando no centro
da porta (Figura a) e depois, aplicando a mesma força
empurre na extremidade (Figura b).
• A porta é fechada mais facilmente quando a força é
aplicada na extremidade da porta.
• “Dê-me uma alavanca que moverei o mundo”
Arquimedes
• Alavanca: Barra rígida apoiada (ponto de apoio O)
usada para facilitar o deslocamento de um corpo
pesado.
• Braço de Alavanca (L) é a distância do ponto de apoio
(O, por onde passa o eixo de rotação), à linha de ação
da força (F)
Movimento rotacional...
Momento angular
• O momento linear p=mv também possui uma
correspondente grandeza angular, o momento angular
L.
(14)
unidade kgm2/s ou J.s. A rotação
não é necessária para o momento
angular, a partícula não precisa
estar girando em torno de O para
ter momento angular em relação a este ponto.
• O módulo do vetor é:
(15)
• Assim como o torque, o momento angular só faz
sentido quando especificamos o ponto de referência.
• O movimento rotacional tem uma lei de movimento
semelhante à Segunda Lei de Newton (F=dp/dt).
(16)
• Válida também para um sistema de
partículas e para um corpo rígido.
O torque resultante agindo sobre um
sistema é igual a taxa temporal de
variação do seu momento angular.
• O momento angular de um corpo
rígido que gire em torno de um eixo
fixo pode ser definido em função do
momento de inércia I:
(17)
• Em que I=miri2 nos diz como a massa de um corpo
girando se distribui em torno do eixo de rotação e é
denominada inércia rotacional ou momento de inércia I
do corpo em relação ao eixo de rotação.
• O momento de inércia representa uma resistência ao
movimento de rotação.
Para um corpo rígido em equilíbrio:
• A força externa resultante tem que ser nula:
𝐹=0
(18)
Equilíbrio translacional
• O torque externo resultante tem que ser nulo ao redor
de qualquer eixo:
𝜏=0
(19)
Equilíbrio rotacional
• O torque resultante agindo sobre um corpo é
proporcional à aceleração angular do corpo e a
constante de proporcionalidade é o momento de
inércia I:
(20)
Movimento rotacional...
Conservação do momento angular
• Para o caso particular de um sistema em rotação em
torno de um eixo fixo (Eq. 16) quando nenhum torque
externo atua sobre o sistema (Eq. 19) temos a seguinte
lei de conservação do momento angular:
(21)
• “Quando nenhum torque externo atua sobre um
sistema L permanece constante, qualquer que seja a
alteração ocorrida no interior do sistema”
• A Eq. 21 permanece válida para um sistema não rígido
neste caso, a velocidade angular também varia de i
para f, tal que:
(22)
• Se I diminui tem de aumentar.
• Exemplos clássicos de sistemas em que existem apenas
forças internas e, portanto:
• Com a aproximação dos halteres (If<<Ii) a velocidade
angular do sistema aumenta (f>>i)
assim como a patinadora do gelo que encolhe os braços para girar mais rapidamente,...
• (I2<<I1) e (2>>1)
a mergulhadora que dá um salto múltiplo dobrando os joelhos e juntando os braços para girar
o corpo e os esticando após para cair mais lentamente na água,...
L’
• (I>>I’) e (<<’)
a ginasta que durante o salto varia o momento de inércia e proporcionalmente varia sua
velocidade,...
• As mudanças no momento de inércia são obtidas com
a manipulação dos segmentos resultando nos saltos
carpado e estendido
o gato que faz girar a cauda e encolhe as patas para cair de pé...
• A rotação no eixo transverso tem menor distribuição
de massa o que facilita o movimento.
Referências
• Bibliografia:
1. TIPLER, Paul Allen; MOSCA, Gene. Física para
cientistas e engenheiros. Rio de Janerio: LTC, vol 1.
2. SERWAY, Raymond A., JR JEWETT John W.
Princípios de física. São Paulo: Thomson, vol 1.
4. HALLIDAY, David; RESNICK, Robert; WALKER, Jearl.
Fundamentos de física. Rio de Janeiro, RJ: LTC, vol 1.
5. CHAVES, Alaor. Física Básica: Mecânica. Rio de
Janeiro: LTC.