1ªAula do cap. 10 Rotação
Conteúdo:
• Corpos rígidos em rotação;
• Variáveis angulares;
• Equações Cinemáticas para
aceleração angular constante;
• Relação entre Variáveis Lineares e Angulares;
• Energia Cinética de Rotação e
• Momento de Inércia.
Referência:
• Halliday, David; Resnick, Robert & Walker, Jearl. Fundamentos de Física, Vol 1.
Cap. 11 da 6a. ed. ou cap. 10 da 7ª ed. Rio de Janeiro: LTC.
• Tipler, Paul. Física, Vol 1 cap. 9. 4a. ed. Rio de Janeiro: LTC, 2000.
O corpo rígido
•O corpo rígido é aquele
no qual a distância entre
duas partículas quaisquer
é fixa!
r
rA = (x A , y A , z A )
r
rB = (xB , y B , z B )
r
rA
r
rB
θ
Ângulo de rotação
( x A − xB ) + ( y A − y B ) + ( z A − z B ) = r
2
2
2
2
• estamos interessados em estudar a rotação de um corpo
rígido em torno de um eixo fixo
O corpo rígido
• estamos interessados em estudar a
rotação de um corpo rígido em torno
de um eixo fixo
ẑ
• por conveniência vamos fixar esta
direção ao longo do eixo ẑ
• o eixo de rotação não precisa ser
um dos eixos de simetria do corpo
ŷ
θ
x̂
Variáveis rotacionais
• a linha de referência é perpendicular
ao eixo de rotação e fixa ao corpo. O
seu deslocamento define o ângulo de
rotação do corpo rígido.
ẑ
• o sentido da rotação é dado pela regra
da mão direita.
ŷ
x̂
Linha de
referência
Δθ
Variáveis rotacionais
• cada ponto do corpo rígido executa movimento circular
•Em geral as rotações em um plano podem ser facilmente
descritas por um ângulo e um intervalo de tempo.
•Considere o comprimento S do segmento de um círculo (arco)
contido em ângulo θ. Se o círculo tem um raio r, o comprimento
de sua circunferência é dado por L = 2 π r.
t2
r
a)
t1
θ1
θ
S
θ2
o
S=θr
b)
"Relação 1 rad = 57,3o ou 2π rad = 360o.
x
Variáveis rotacionais
r
r = (x , y)
Velocidade tangencial
r
Δs 2πr
Δθ =
=
= 2π rad
r
r
Vetor velocidade v, no MCU, tem
módulo constante, sendo tangente a
trajetória em cada ponto.
v = distância percorrida = 2π r
tempo gasto
t
Unidade: m/s
rΔθ
v=
=rω
Δt
O tempo necessário para percorrer uma volta completa, chama-se
período do movimento. O inverso do período é a freqüência do
movimento.
Variáveis rotacionais
A velocidade angular média (ω) do corpo, no intervalo entre t1 e t2, é
definida como a razão entre o deslocamento angular
dθ = θ2 - θ1 , e o intervalo de tempo dt = t2 - t1 :
Δθ
ω=
Δt
2π
ω=
T
ω = 2π F
A coordenada angular que descreve a posição de um corpo
na trajetória circular (MCU) pode ser dada por:
θ = θo + ω t
Em uma volta completa o ângulo é 2π rad.:
Δs 2πr
Δθ =
=
= 2π rad
r
r
Variáveis rotacionais
Um corpo rígido girando em torno de um eixo fixo possui apenas duas
possibilidades de rotação: no sentido horário (-) ou anti-horário (+). O
sentido do vetor velocidade angular é dado pela regra da mão direita: "
Posiciona-se a mão direita aberta com os dedos maiores no mesmo
sentido da rotação do disco. Então, o polegar indicará o sentido do vetor
velocidade angular."
Eixo
Z
Eixo
z
Eixo d
motor
Δθ
ω=
Δt
ω
Variáveis rotacionais
V1 = 2πR1
T
V2= 2πR2
T
ω1 = ω2 = 2π
T
T 1 = T2 e
f1 = f2
Variáveis rotacionais
Exemplo
Cálculo da velocidade angular da Terra em torno do seu eixo
A Terra completa uma revolução a cada
23h56min (dia sideral).
O módulo da sua velocidade angular é
2π rad 6,28 rad
− 5 rad
ω=
=
= 7,289 ×10
86160 s
dia
s
e a sua direção aponta para o
norte ao longo do eixo de rotação.
r
ω
Variáveis rotacionais
Velocidade Angular Instantânea:
A velocidade angular instantânea ω é definida como o limite
de ω para o qual dt tende → 0 dt aproxima-se de zero :
ω = lim Δθ = dθ
Δt -0
Δt
dt
Unidade:
É o radiano por segundo ( 1rad/s).
Outras unidades:
rotações por minuto (r.p.m.)
ou 1 r.p.s. = 2π rad/s.
Variáveis rotacionais
Força no Movimento Circular
A força que age e modifica a direção da velocidade de um corpo é
chamada força centrípeta. Qualquer tipo de força pode funcionar
como força centrípeta. Exemplo: Lua gira em torno da Terra devido à
interação gravitacional.
Variáveis rotacionais
Força centrípeta provoca a
aceleração centrípeta no
Movimento Circular
v2
ac =
= ω .v
r
v=rω
aceleração angular média é definida como:
α = Δω
Δt
A unidade de aceleração angular é 1 rad/s2 = 1/s2.
aceleração angular instantânea a é definida como limite desta
razão quando Δt tende a zero :
α = lim Δω =
Δt -0 Δt
d2θ
dt2
Variáveis rotacionais
Principais Equações
Movimento com
Movimento com aceleração
aceleração linear constante
angular constante
a = constante
α = constante
v = vo + at
w = wo + α t
x (t)= xo + vot + 1/2 at2
θ(t) = θo + wo t + 1/2 α t2
2
v = v0 + 2α (x − x0 )
2
2
ω = ω0 + 2α (θ − θ0 )
2
θ (t ) ↔ x(t ) , ω (t ) ↔ v(t ) e α (t ) ↔ a (t )
Relação entre Variáveis Lineares e Angulares:
v=wr
at = r α
ac = v2/r = w2 r = w v
Variáveis rotacionais no espaço:
• cada ponto do corpo rígido executa
movimento circular
ẑ
• módulo do vetor posição do ponto
r
r =r
•
r
ρ
r
r
r = (x , y, z)
r
ρ
θ r
r
ϕ
distância do ponto ao eixo de rotação
ρ = ρ = r sin θ
x̂
s
• distância percorrida pelo ponto
s= ρϕ
ϕ = ângulo de rotação em radianos
Representação θ = ângulo de rotação no plano
ŷ
Variáveis rotacionais no espaço:
• O deslocamento angular
ẑ
Δϕ = ϕ 2 − ϕ1
Esta variável tem módulo ( Δϕ ) ,
direção ( ẑ ) e sentido (regra da
mão direita) a ela associados
Será um vetor ?
ρ
r
r
ϕ1
x̂
Δϕ
r
ŷ
ϕ2
Δϕ
Δϕ
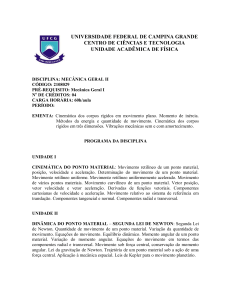
Será um vetor ? Na figura abaixo aplicam-se dois deslocamentos
angulares de 90º a um livro inicialmente na horizontal; primeiro a rotação em
torno do eixo x e depois a rotação em relação ao y. Inverte-se os deslocamentos
angulares no segundo caso, isto é, primeiro rotação em y depois em x. O livro
acaba chegando a diferentes orientações no final. Portanto, a soma de dois
deslocamentos angulares depende da ordem em que é efetuada, eliminando a
possibilidade de eles serem vetores.
exemplo
Δϕ
não é um
vetor !
rotações sucessivas de um livro pag. 208.
Lembrando, para as variáveis lineares...
O cálculo de x(t) a partir de v(t)
t
x − x0 = ∫ v (t ) dt
t0
O cálculo de v(t) a partir de a(t)
t
v − v0 = ∫ a (t ) dt
t0
•
•
Resumo dos Conceitos
Problema direto,
– x(t) →(derivada) → v(t)
– v(t) →(derivada) → a(t)
Problema inverso
– a(t) →(integral) → v(t)
– v(t) →(integral) → x(t)
Newton
Variáveis rotacionais no espaço:
zˆ ≡ nˆ
r r
ω
Deslocamento angular
ρ
r
r
Δϕ (t ) = ϕ (t+Δt ) − ϕ (t)
Velocidade angular (escalar) média
Δϕ
ω=
Δt
Velocidade angular instantânea
(vetor)
r
Δ ϕ dϕ
ω = lim
=
dt
Δt → 0 Δ t
ϕ (t )
x̂
ϕ (t + Δt )
ŷ
Δϕ (t )
Variáveis rotacionais no espaço:
Deslocamento angular
Δϕ ( t )
r
ω ρ
Velocidade angular instantânea
(vetor)
r
r
r
Δ ϕ dϕ
ω = lim
=
dt
Δt → 0 Δ t
Deslocamento angular Δϕ obtido
através da ω velocidade angular:
zˆ ≡ nˆ
r
ϕ (t )
x̂
t2
ϕ (t + Δt )
ϕ(t 2 ) − ϕ(t 1 ) = Δϕ = ∫ ω(t) dt
t1
ŷ
Δϕ (t )
Variáveis rotacionais no espaço:
r
r
r
Δω = ω (t+Δt ) − ω (t)
r
v Δω
α=
Aceleração angular média
Δt
r
r
Δω dω
r
Aceleração angular instantânea
=
α = lim
Δt → 0 Δt
dt
r
• A aceleração angular instantânea é um vetor paralelo a //
Variação da velocidade angular
ω
Variação da velocidade angular:
r
r
t2
r
ω ( t 2 ) − ω ( t 1 ) = Δω = ∫ α ( t ) dt
t1
Energia Cinética na Rotação
Referência:
• Halliday, David; Resnick, Robert & Walker, Jearl. Fundamentos de Física,
Vol 1. Cap. 11 da 6a. ed. Ou Vol 1. cap. 10 da 7ª ed. Rio de Janeiro: LTC.
• Tipler, Paul. Física, Vol 1 cap. 9. 4a. ed. Rio de Janeiro: LTC, 2000.
Energia Cinética na Rotação
A Energia cinética total de um corpo em rotação é a soma
das energia cinéticas de todas as partículas que constituem
o corpo.
energia cinética translacional
Kt = 1/2 mv2
energia cinética rotacional
(rotação) Kr = ?
Energia Cinética na Rotação
Energia cinética de translação Kt = 1/2 mv2
substituindo v = wr
cada partícula m do corpo K = 1/2 m(wr)2
Kr= 1/2 ( Σmr2 ) w2
A grandeza Σmr2 é denominada Inércia à
rotação - momento de inércia
I = Σ m r2
Momento de Inércia
energia cinética translacional
Kt = 1/2 mv2
energia cinética rotacional
(rotação)
Kr = 1/2 I w2
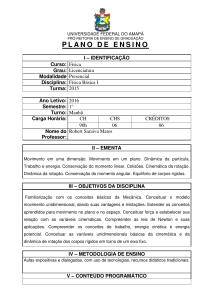
Exemplo: Quatro partículas de massa m, estão ligadas por hastes de
massa desprezível formando um retângulo de lados 2a e 2b. O sistema
gira em torno de um eixo no plano da figura. Calcular o momento de
inércia, nas situações apresentadas.
Momento de Inércia:
I = Σ m r2 = m1 r12 + m2 r22 + m3 r32 + m4 r42
I = m a2 + m a2 + m a2 + m a2 = 4ma2
I =
2
4ma
Momento de Inércia:
I = Σ m r2 = m1 r12 + m2 r22 + m3 r32 + m4 r42
I = m 02 + m 02 + m (2a)2 + m (2a)2 = 8ma2
I = 8ma2
Cálculo do Momento de Inércia:
Anel homogêneo de massa M e densidade linear λ
M
M
λ=
⇒ dm =
R/ dϕ
2π R
2π R/
dϕ dl = R dϕ
R
Aro
2π
M
I = ∫ R dm = ∫ R
dϕ = MR 2
2π
0
2
2
Cilindro ou Disco homogêneo de massa M e densidade superficial σ
M
M
⇒ dm =
2π/ r dr
σ=
2
2
πR
π/ R
dr
4 R
R
2M
2M r
I = ∫ r dm = ∫ r
r dr = 2
2
R
R 4
0
2
R
2
0
r
ds = 2π r dr
1
= MR 2
2
Momento de inércia
I = 52 MR 2
I = 75 MR 2
I = 23 MR 2
Ver tabela 11.2 pag. 213 Halliday 6ª ed.
Casca esférica
Esfera sólida
Aro em torno do eixo central
Haste fina em torno do do eixo que passa pelo centro,
perpendicular ao comprimento
Barra circular em relação ao eixo transversal pela ponta.
O teorema dos eixos paralelos
Lista 20 exercício2)
I = I CM + Mh
2
a) Calcule o momento de inércia de uma barra delgada de ferro
de 2 m de comprimento e 8,7 kg de massa, em torno de um eixo
perpendicular à barra e localizado a 30 cm do centro da barra.
b) O momento de inércia é uma grandeza escalar ou vetorial e
qual sua unidade?
CM
.
h
O trabalho e Energia cinética no
deslocamento angular
1
1
2
2
⇒ ΔW = I ω f − I ω i
2
2
O trabalho total é igual à variação da energia
cinética de rotação.