EXERCÍCIOS RESOLVIDOS
Este resumo possui direitos autorais e não deve ser distribuído. www.engenhariaparaconcursos.com.br
ENG JR ELETRON 2005
29
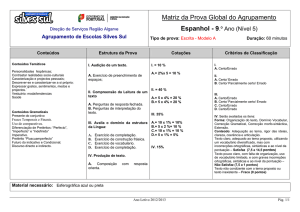
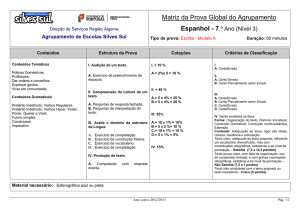
O gráfico mostrado na figura acima ilustra o diagrama do Lugar das Raízes de um sistema de 3ª
ordem, com três pólos, nenhum zero finito e com realimentação de saída. Com base nas
informações contidas no gráfico, o valor do ganho K ≥ 0 que posiciona os pólos de malha
fechada no limiar da instabilidade é:
(A) 40
(B) 64
(C) 120
(D) 160
(E) 240
com base no gráfico, calcula-se as raízes s(s + 2)(s + 8) → s(s2 + 10s + 16) → s3 + 10s + 16
aplica-se o critério de Routh:
1
16
10
k
→ 16*10 – k*1 > 0 → k < 160. Alternativa D.
ENG EQUIP JR ELETRON 2007
Uma técnica de controle comumente utilizada na indústria é o controle liga/desliga (on/off). A
respeito de características de sistemas de controle dessa natureza, julgue os itens a seguir.
99 Sistemas que usam este tipo de controle nunca apresentam ciclo limite. Errado.
100 A histerese do dispositivo de chaveamento permite ajustar a freqüência de oscilação,
geralmente observada na variável de saída do sistema. Correto. Dependendo da inércia da
variável, a oscilação terá um tempo maior ou menor para acontecer.
101 Deve-se achar a relação adequada de compromisso entre amplitude das ondulações de
saída e sua freqüência. Correto. Isso é necessário para tornar o controle ON-OFF eficaz.
102 Sistemas dessa natureza podem ser adequadamente representados por uma função
de transferência com variáveis no domínio de Laplace. Errado. Não há na tabela função ON-OFF
no domínio da freqüência.
www.EngenhariaParaConcursos.com.br
1
EXERCÍCIOS RESOLVIDOS
Este resumo possui direitos autorais e não deve ser distribuído. www.engenhariaparaconcursos.com.br
ENG EQUIP PL ELETRON 2006
28
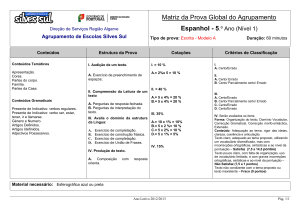
A dinâmica de um satélite, em relação a um dos seus eixos de rotação, pode ser aproximada
pela função de transferência (G), relacionando a posição angular (Θ) e o torque de
posicionamento (T).
Considere a malha de controle abaixo.
Um regulador C(s) que estabiliza o posicionamento do satélite é do tipo:
(A) P
(B) I
(C) “Lag”ou atrasador de fase
(D) PI
(E) PD
ENG EQUIP JR ELETRON 2004
Em um processo térmico de aquecimento de certo fluido, após modelagem física e
formulação matemática, chegou-se a um modelo simplificado, cuja função de
transferência é
, em que Θ o (s) é a tem mperatura do fluido, U(s) é a
variável de atuação sobre o processo, K é uma constante real positiva e τ (τ > 0) é a
constante de tempo do processo. Implementou-se um sistema de controle para esse
processo conforme ilustrado na figura acima, em que D(s) representa o controlador
www.EngenhariaParaConcursos.com.br
2
EXERCÍCIOS RESOLVIDOS
Este resumo possui direitos autorais e não deve ser distribuído. www.engenhariaparaconcursos.com.br
eletrônico analógico, M é uma constante real positiva que caracteriza o sensor de
temperatura e Θ i (s) é a temperatura de referência para o fluido. A respeito do
comportamento dinâmico desse sistema controlado, julgue os itens que se seguem.
146 Se D(s) for um controlador proporcional, com ganho positivo, então a temperatura
do fluido não acompanhará, em regime permanente, com erro nulo, a temperatura de
referência, caso esta sofra variação abrupta (degrau de temperatura). Correto.
147 Se D(s) for um controlador proporcional e integral, e a entrada varie a uma taxa
constante (rampa), então a temperatura do fluido deve acompanhar a temperatura de
referência, em regime permanente, com erro constante diferente de zero. Correto.
148 Se D(s) for um controlador proporcional, com ganho positivo, o aumento do valor
desse ganho pode ocasionar instabilidade no sistema. Errado.
149 Se D(s) for um controlador proporcional, não é possível variar a constante de tempo
do sistema em malha fechada pela ação desse controlador. Errado.
150 Para D(s) = 1, o sistema deve apresentar ganho DC (ou ganho estático) igual a
. Correto.
Em um sistema de controle digital, um computador é utilizado para controlar um
processo de primeira ordem, conforme a figura acima. No diagrama de blocos, A/D
e D/A correspondem, respectivamente, às interfaces analógica/digital e digital/analógica,
e M corresponde ao ganho estático positivo do sensor que mede a variável de saída do
processo. Sendo C(s) a variável em controle e R(z) a entrada de referência, julgue os itens
a seguir, com referência a esse sistema.
151 Como, para o computador, o processo é tratado de forma discreta, o algoritmo de
controle deve ser implementado na forma de uma equação diferencial parcial. Errado.
152 Do ponto de vista digital, levando-se em conta as interfaces digital/analógica e
analógica/digital, o processo e o sensor são tratados pelo computador, no domínio z,
www.EngenhariaParaConcursos.com.br
3
EXERCÍCIOS RESOLVIDOS
Este resumo possui direitos autorais e não deve ser distribuído. www.engenhariaparaconcursos.com.br
pela função de transferência discreta equivalente
, em que L –1 é o
operador transformada inversa de Laplace e Z, o operador transformada z. Correto.
153 Para um mesmo algoritmo de controle com parâmetros fixos, a variação do período
de amostragem altera o comportamento dinâmico do sistema controlado. Correto.
154 A seqüência b(kT), obtida pela transformada z inversa de B(z), é dada por b(kT) =
c(t), para t = kT, em que k = 0, 1, 2, 3, ... Errado.
155 O conversor D/A mantém sua saída constante (retenção de ordem zero) por um período
de amostragem. Correto.
Um processo a ser controlado possui função de transferência de malha aberta dada por
, com K > 0. Considerando um procedimento de fechamento de malha com
realimentação negativa unitária nessa situação, julgue os itens subseqüentes.
156 Esse processo em malha aberta possui ação derivativa. Errado.
157 O processo em malha aberta possui um pólo na origem do plano complexo S,
enquanto o sistema em malha fechada não possui este pólo na origem. Correto.
158 O segmento de reta s < –1, com s real no plano complexo, faz parte do lugar geométrico
das raízes do sistema. Errado.
159 Esse sistema deverá ter pólos de malha fechada complexos conjugados quando K >
1/4. Correto.
160 O sistema em malha fechada se comportará como um filtro passa-altas quando analisado
no domínio da freqüência ω. Errado.
ENG EQUIP JR ELETRON 2007
Desprezando não-linearidades, considere um servomecanismo,implementado com um motor
de corrente contínua e um tacômetro acoplado em seu eixo, que possui função de
transferência dada por
, em que V W (s) e V a (s) correspondem às
transformadas de Laplace da tensão de saída do tacômetro e tensão de armadura do motor,
respectivamente. K MT e J são constantes positivas. A dinâmica do amplificador de excitação
de tensão, assumida como estática, é dada pelo ganho K Amp . Para controle de
velocidade, o amplificador, o motor e o tacômetro estão em cascata, e realimentação
www.EngenhariaParaConcursos.com.br
4
EXERCÍCIOS RESOLVIDOS
Este resumo possui direitos autorais e não deve ser distribuído. www.engenhariaparaconcursos.com.br
negativa unitária é utilizada. Acerca do controle dinâmico do processo apresentado, julgue os
itens a seguir.
103 Para K Amp positivo, se seu valor aumenta, a constante de tempo do sistema em
malha fechada também aumenta. Errado.
104 O sistema é do tipo 1. Errado.
105 Pelo modelo teórico apresentado, se K Amp e K MT forem positivos, então o sistema
em malha fechada é sempre estável. Correto.
106 Se o sinal de referência de velocidade tiver forma parabólica com relação ao tempo, a
resposta do sistema não conseguirá acompanhá-lo e tenderá a apresentar erro infinito quando
o tempo tender ao infinito. Correto.
Considere um controlador discreto dado pela seguinte função no domínio-z:
,
em que os parâmetros K, T, T 1 e T 2 são constantes reais e positivas. A partir da
análise de D(z), julgue os itens subseqüentes.
107 Esse controlador acrescenta um pólo em z = 1 na função de transferência de malha aberta
do sistema a ser controlado. Correto.
108 Dependendo do processo a ser controlado, o termo
tem uma ação tal
que permite reduzir ou eliminar, no sistema, erros em regime permanente. Correto.
109 Esse controlador é não-linear. Errado.
110 Esse controlador tem simplesmente uma ação proporcional. Errado.
Considere um processo linear caracterizado pelas seguintes equações:
,
em que x 1 (t) e x 2 (t) são as variáveis de estado do processo, y(t) é a variável de saída e u(t)
é a variável de entrada. K 0 e a são parâmetros reais e constantes. A respeito desse
processo e de suas características dinâmicas, julgue os itens subseqüentes.
111 Esse processo não possui pólo na origem do plano complexo s. Errado.
www.EngenhariaParaConcursos.com.br
5
EXERCÍCIOS RESOLVIDOS
Este resumo possui direitos autorais e não deve ser distribuído. www.engenhariaparaconcursos.com.br
112 Se a for positivo, então o processo terá pelo menos um autovalor real positivo.
Correto.
113 Esse processo possui dois zeros no infinito. Correto.
114 A função de ponderação desse processo possui valor infinito em t = 0 segundo. Errado.
115 Sendo a negativo, no diagrama de Bode de magnitude da resposta em freqüência desse
processo observa-se queda de 20 dB por década na região de altas freqüências (freqüências
tendendo ao infinito). Errado.
ENG AUTOM 2008
27
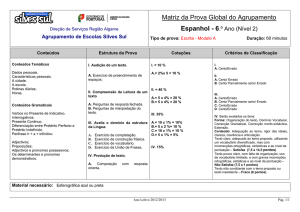
A figura acima apresenta um circuito ativo, utilizado na implementação de compensadores
de primeira ordem de atraso de fase ou de avanço de fase. O amplificador operacional do
circuito pode ser considerado como ideal. Para que o pólo da função de transferência do
compensador esteja localizado em s = −5, a resistência de R, em Ώ , deverá ser
(A) 0,5
(B) 1,0
(C) 2,0
(D) 5,0
(E) 8,0
www.EngenhariaParaConcursos.com.br
6