UNIVERSIDADE FEDERAL DO RIO GRANDE DO NORTE
DEPARTAMENTO DE ENGENHARIA ELÉTRICA
INSTRUMENTAÇÃO ELETRÔNICA
PROFESSOR: LUCIANO FONTES
Gerenciamento de Inclinação para Recepção Ativa Sensoriada Solar
GIRASSOL
Rafael Medeiros
Natal
junho de 2009
Resumo
Este relatório tem como principal objetivo apresentar os registros sobre a implementação de
um sistema analógico para correção de posicionamento de células foto voltaicas.
Neste relatório será abordado o conceito do projeto os detalhes de sua implementação.
Introdução
Este projeto apresentará a seguinte abordagem, será devolvido um circuito analógico para
atuar na automação e controle de células fotovoltaicas controlando sua posição, este circuito
deve capaz de oferecer uma posição as células perpendicular a fonte de luz e reduzir a
quantidade de painéis estáticos, como característica de robustez podemos citar a
característica do circuito ser capaz de controlar a posição de um painel, resistir a interferência
externa e que permita a inclusão de novos recursos.
Contextualização do problema
Como um desafio de qualquer sistema de geração obter o máximo rendimento é de grande
importância.
Uma constante de qualquer sistema de geração é a eficiência, no caso da energia
elétrica sistemas de geração solar, eólica, hidroelétrica entre outras dependem
diretamente da incidência do ente físico em suas superfícies e geralmente para
melhores rendimentos se faz necessária maior área e no caso da energia solar a área é
um fator critico, pois a posição do sol muda constantemente reduzindo a eficiência das
placas.
Para obter melhor rendimento as placas são dispostas de forma a estarem perpendiculares
no momento que o sol apresentar maior incidência.
O método utilizado atualmente para tirar o maior aproveitamento da luz solar é
direcionar a placa ao meio dia que a incidência da luz solar apresenta seu auge.
Fatores que prejudicam o rendimento;
Placas estáticas: como citado anteriormente o fato da placa se apresentar
estática desperdiça parte da luz que incide em ângulo com relação a placa pois
diminui a área de contato com a luz.
Danos ao equipamento: o fato da instalação deste equipamento ocorrer em
ambientes externos o torna suscetível a danos causados por fenômenos
naturais ou vândalos, um sistema móvel que apresenta a capacidade
movimentar as células pode ser utilizado para proteger o equipamento contra
fortes tempestades, furacões e vândalos durante a noite.
Mudança do percurso do sol durante o ano: Placas instaladas de forma
estática apresentam a desvantagem de mesmo ao meio dia ainda não
apresentar o alinhamento desejado em 90°, pois dependendo da localização
no planeta a rota seguida pelo sol durante as estações do ano varia muito,
ainda é válido citar o fato de se ocorrer alguma alteração na posição da placa a
mesma vai permanecer com aquela posição e tornar o sistema ainda mais
ineficiente, esta alteração pode ocorrer por meio de rajadas de vento ou de
qualquer outra interferência natural, como animais.
Fundamentação teórica
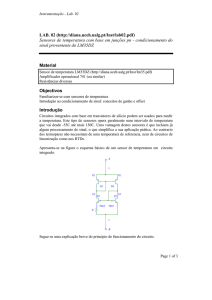
Ponte de Wheatstone
Análise da ponte de Wheatstone como um transdutor para sensores resistivos com
baixa sensibilidade. Análise com simplificações, para uma pequena faixa de atuação.
Figura 1 - Ponte de Wheatstone
A figura acima mostra uma ponte de Wheatstone onde a tensão de saída Vo é dada
por:
v
0
E
=
δ R1 δ R2 δ R3 δ R4
R2 R4
−
+
−
( R1 + R2 )( R3 + R4 ) R1
R2
R3
R4
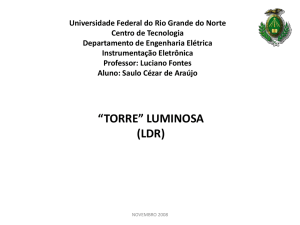
Amplificador operacional diferenciador
No circuito abaixo temos que o ganho é dado por 3.9k / 22 e esses ganhos se
subtraem.
VDD
12V
0
R2
3.9kΩ
R1
22Ω
R3 4
22Ω
4
13
U1A
1
3
2
11
TL084CN
R4
3.9kΩ
VEE
-12V
Figura 2 - Amplificador operacional diferenciador
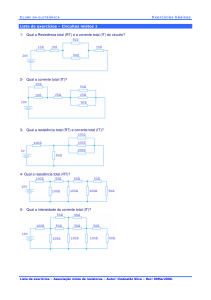
Amplificador de par pnp npn
Para obter a inversão do sentido do motor se faz necessário o uso de transistores no
modo complementar.
Q1
TIP31C
Q2
TIP32C
Figura 3 - Transistores PNP e NPN trabalhando de maneira complementar
A disciplina de instrumentação eletrônica
Esta atividade teórica experimental tem como objetivo capacitar o aluno a desenvolver o
raciocínio, a criatividade e organização no desenvolvimento de um projeto que abrange o
setor de instrumentação.
Existe o ramo da eletrônica analógica e o ramo da eletrônica digital, este trabalho se baseia
inteiramente no ramo da eletrônica analógica e mesmo a existência de componentes como
display ou algum controle que tenha como base a lógica binária não elimina o fato da parte
responsável pela instrumentação em si continuar analógica.
Características do projeto
A proposta deste trabalho é desenvolver um dispositivo que tem como principal característica
buscar o alinhamento de um dispositivo mecânico com alguma fonte de luz, mais
precisamente o sol. Após observar que parte da energia solar era desperdiçada ao incidir em
uma célula solar em um ângulo diferente de 90°, tem-se o objetivo da atividade em questão,
“Aplicação circuito com mecanismo móvel na otimização da geração de energia solar”.
Transdutores e sensores
Como principal fator para um bom equipamento de instrumentação deve-se conhecer a
grandeza a ser avaliada bem como a sua faixa de abrangência, depois deste passo devemos
observar as facilidades que aquela faixa de sensores nos oferecem, estas facilidades abrangem
tamanho do sensor, robustez, custo e faixa de atuação.
Após avaliar a grandeza em questão (brilho do sol), temos que o sensor não demanda tantos
cuidados com relação à interferência, já que o sol é a fonte de luz mais brilhosa em campo
aberto, também podemos observar que o sensor precisa ser confiável em temperaturas média
– altas precisamos de um dispositivos resistente a acontecimentos como ressecamento, e
finalmente temos o custo do sensor.
Após esta avaliação o sensor escolhido foi o LDR (resistor dependente de luz). Um LDR é um
transdutor de entrada (sensor) que de acordo com a luz visível varia os valores de resistência.
É feito de sulfeto de cádmio (CdS) ou seleneto de cádmio (CdSe). Sua resistência diminui
quando a luz é muito alta, e quando a luz é baixa, a resistência aumenta. Um multímetro pode
ser usado para encontrar a resistência na escuridão ou na presença de luz intensa. Os valores
apresentados pelo LDR podem variar de valores acima de acima de 1M ohm no escuro até
próximo de 100 ohm em condições de alto brilho.
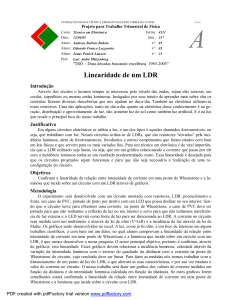
Instrumento e instrumentação
Ente físico
Sensor e
transdutor
Sol
LDR
Interface homem
máquina
Atuação na posição
do equipamento
Conformador
Ponte de
Wheatstone
Amplificadores
operacionais
Processamento
do sinal
Figura 4 - Diagrama de blocos do instrumento
Características de instrumentação
Faixa
O instrumento apresenta uma faixa simples que será representada pela existência ou
ausência de luz.
Resolução
Com relação à resolução temos que serão usados dois sensores em conjunto com um
circuito de amplificação os seus valores serão apenas diferenças entre esses dois
sensores o que após passar por um alto ganho dos amplificadores resulta em valores
de +V. –V e 0.
Sensibilidade
Após testes com iluminação controlada pode-se observar que o LDR demonstra um
nível de sensibilidade mais que satisfatório para esta atividade, devido o caráter
discreto dos valores utilizados basta apenas que um LDR apresente resistência superior
ao seu par que a tensão irá variar até um valor de +V ou então de –V se os valores das
resistências voltarem a reverter.
Linearidade
Com relação a linearidade não foram realizados testes pois esta característica não era
de grande importância no projeto pois o sistema realizava a subtração de tensões em
condições em iluminação semelhante, o que significa que os LDR sempre estavam na
mesma faixa de linearidade pois a iluminação ambiente é a mesma para os dois.
Erro
Esta foi o fator que mais influenciou no projeto, pois alguns LDRs apresentavam um
erro considerável em relação aos outros, temos o seguinte exemplo:
Alguns LDRs sob iluminação controlada apresentavam uma resistência de 20kΩ já
outros apresentavam uma resistência de 40kΩ.
Este problema foi contornado ao utilizar LDRs de mesma característica como
complementares, desta maneira o erro apresentado pelos dois será subtraído
resultando no resultado esperado que é apenas a diferença entre os dois.
Precisão
Intimamente ligado ao fator anterior a precisão que considero o fator mais importante
no projeto, as medidas obtidas com os LDRs foram altamente consistentes, tal fato
oferece uma boa precisão e consequentemente uma boa qualidade da medição.
A precisão é tão critica neste projeto, pois se um dos LDRs começar a apresentar
diferença ao seu par isso vai gerar uma diferença de tensão que pode ser entendida
pelo sistema como uma modificação da posição da fonte de luz e atuar no controle dos
motores desta maneira perdendo rendimento da célula foto voltaica.
Estabilidade
A estabilidade é o segundo fator mais importante neste projeto, pois é neste conceito
que se baseia todo o funcionamento do circuito, pelo fato do circuito sempre buscar o
equilíbrio e por receber constantemente modificações se ele não apresentar um bom
nível de estabilidade pode apresentar um comportamento como o visto em sala na
primeira apresentação de andamento do projeto onde o equipamento recebia um
estimulo e respondia a este estimulo, passava do ponto de equilíbrio e recebia um
estimulo no sentido contrário, o que resultava em uma grande oscilação do
mecanismo, este problema foi resolvido com a utilização de um filtro, onde a luz
incidente no LDR era confinada aos seu eixo, este filtro foi construído com acrílico
preto fosco de tal formato a sempre deixar os LDRs na sombra para uma fonte de luz
perpendicular
Deriva
Bem como o erro a deriva não afeta muito o funcionamento do circuito já que todos os
componentes estão sujeito as mesmas condições ambientais.
VDD
12V
VCC
5V
VCC
R2
3.9kΩ
R1
6
R7
560Ω
VDD
0
R14
5kΩ
7
22Ω
R3 4
R8
560Ω
22Ω
Q1
4
13
U1A
3
TIP31C
2
1
2
Q2
11
TL084CN
R4
M
R15
1kΩ
0
3.9kΩ
VEE
TIP32C
S1
MOTOR
0
VEE
-12V
Figura 5 - Circuito no programa de simulação multisim
Desafio
Alguns componentes apresentavam valores
diferentes uns dos outros
Sistema oscilatório ao passar do ponto de
equilíbrio
O sistema mecânico não suporta o peso das
células foto voltaicas
Velocidade de atuação dos motores elevada
Solução
Agrupar em par os componentes que
apresentam o mesmo erro
Implantação de um filtro físico de acrílico
preto fosco para limitar o acesso a luz
Solução ainda não implementada
Após instalar todo o sistema, o peso diminuiu
a velocidade de atuação dos motores
Fotos
Bibliografia
www.wikipedia.org
Datasheet TL084
Datasheet TIP31C, TIP32C
www.google.com.br – LDRs
Material disponibilizado em sala – Luciano Fontes