Capítulo 1 - Estática
1.1. Generalidades sobre forças
1.1.1. A Grandeza Vetorial
A finalidade da Estática, parte da Mecânica Geral, é o estudo das condições
nas quais um sólido ou um sistema de sólidos, submetido à ação de forças, encontrase em equilíbrio.
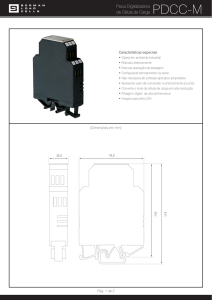
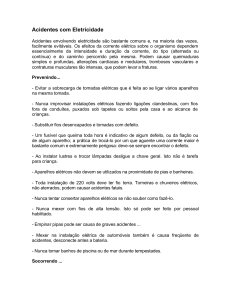
As forças mais conhecidas são os pesos, que têm sempre sentido vertical para
baixo. Uma força de direção qualquer, aplicada num sólido, pode também ser
originada por um peso, conforme apresentado na Figura 1.1. Naturalmente, supõe-se
que a roldana não tenha atrito e que o fio que passa sobre ela não tenha peso. Para
medir forças, costuma-se utilizar dispositivos conhecidos como dinamômetros, que
indicam a intensidade da força pela deformação elástica de uma mola.
Todas as forças encontradas na realidade, são distribuídas: por exemplo, o
peso de um corpo sobre elementos do seu volume, a pressão d’água em um vaso
sobre os elementos da superfície interna do mesmo e a força P da Figura 1.1 sobre a
seção do fio. A força concentrada, tratada na Mecânica como vetor, é uma idealização
que representa em inúmeros casos a realidade com precisão suficiente, como, por
exemplo, no caso da Figura 1.1, em que a espessura do fio é pequena em relação às
dimensões do sólido.
Força P
roldana
sólido
fio
Peso P
Figura 1.1 – Força aplicada por um peso
Adotando-se o SI (Sistema Internacional de Unidades), utiliza-se para as
forças, a unidade N (Newton) e para comprimentos m (metro). As forças distribuídas
sobre volumes terão como unidade N/m3, e sobre áreas, N/m2. Costuma-se utilizar
também, como idealização de forças distribuídas sobre uma superfície em forma de
faixa estreita, a força distribuída sobre uma linha, com a unidade N/m.
Quanto à aplicação do cálculo vetorial ao estudo das forças concentradas,
deve-se observar o seguinte: um vetor é definido pela sua direção (incluindo sentido) e
seu valor absoluto, fazendo abstração da sua posição no espaço. A força, entretanto,
é uma grandeza vetorial que necessita, para sua definição, além da intensidade (N),
da direção e do sentido, também da indicação do ponto de aplicação. As forças
podem, portanto, ser representadas apenas por vetores aplicados, não-livres.
1.1.2. Corpo Rígido
Todo sólido submetido à ação de forças se deforma. Em muitos casos, a
natureza do problema em estudo permite fazer abstração desta deformação,
Professor Luciano Rodrigues Ornelas de Lima
e-mail: [email protected]
Sala 5016 – Bloco A
2
chegando-se, assim, à definição de “corpo rígido”: capaz de receber forças sem se
deformar. Para perceber algumas circunstâncias de que depende a possibilidade de
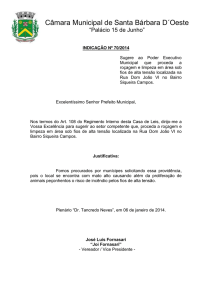
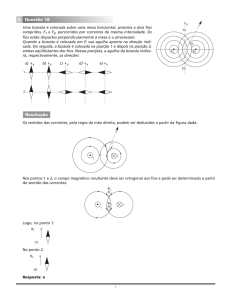
idealizar corpos rígidos, consideremos os problemas da Figura 1.2 onde deseja-se
obter as forças nos fios que suspendem um peso P.
No caso (a), uma simples decomposição da força P em componentes nas
direções dos fios resolve o problema. Supõe-se, neste cálculo, que o ponto A
praticamente não se desloca pela ação do peso, ou seja, o fios são supostos
inextensíveis ou corpos rígidos, como é de se esperar quando se utiliza fios de aço.
α= 0 A
α
α
A
α’
α’
aço
A’
borracha
A
P
A’
P
P
(a)
(b)
(c)
Figura 1.2 – Peso suspenso por fios
No caso (b), com fios de
borracha, o ângulo α aumenta
sensivelmente para α’, devido ao
carregamento, e a idealização dos
fios como rígidos não pode ser
mantida. Em conseqüência, o
cálculo torna-se mais complicado
porque
do
ângulo
α’
de
decomposição dependem as forças
nos fios, que determinam, por sua
vez, o alongamento dos mesmos e
daí o ângulo final α’. Uma vez
conhecido este ângulo, os fios na
sua forma esticada podem ser
supostos rígidos.
esfera
A1
A2
P
Figura 1.3 – Esfera suspensa
Já no caso (c), mostra-se um exemplo no qual, por ser α = 0, mesmo com um
fio de aço, o alongamento deve ser considerado.
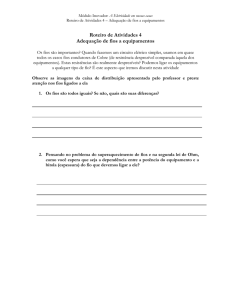
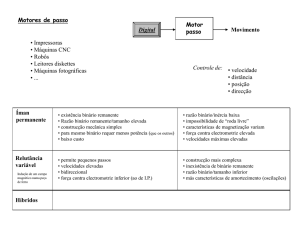
Finalmente, define-se o teorema: “o ponto de aplicação de uma força pode ser
deslocado sobre a linha de ação dela sem alterar a contribuição da mesma para o
equilíbrio do corpo rígido”. Uma força aplicada num corpo rígido é, portanto,
suficientemente determinada pela reta de ação, sentido e intensidade. Como ilustração
do teorema, considerando-se a esfera de peso P da Figura 1.3, que possui um furo
central dentro do qual o fio pode ser fixado num ponto arbitrário, por exemplo, A1 ou
A2. A posição deste ponto de aplicação da força não influi, naturalmente, no equilíbrio
da esfera.
Professor Luciano Rodrigues Ornelas de Lima
e-mail: [email protected]
Sala 5016 – Bloco A
3
1.2. Forças Aplicadas no Mesmo Ponto
Trata-se aqui do caso em que as forças concentradas P1, P2, ..., Pn são
aplicadas no mesmo ponto, ou no mesmo corpo rígido, mas com retas de ação
concorrentes neste mesmo ponto, excluindo, por enquanto, o caso em que este ponto
seja impróprio – forças paralelas.
Deve-se estudar os seguintes problemas:
•
•
•
Pesquisa da resultante de um sistema de forças;
Pesquisa das condições que determinam o equilíbrio de um sistema de
forças;
Decomposição de uma força em componentes.
Pretende-se formular as respostas de três formas diferentes:
•
•
•
Fórmulas vetoriais;
Fórmulas em coordenadas,
Processos gráficos.
P1
A
P1
R = P1 + P 2 + P 3 + P 4
P2
P4
P3
P2
P3
P4
Figura 1.4 – Polígono das forças
A resultante é definida como a soma vetorial das forças:
R=
n
∑P i
1.1
i =1
Se cada força Pi for definida pelas componentes na direção de eixos x, y e z,
ortogonais entre si, P i = X i i + Y i j + Z i k , tem-se as componentes de R :
Rx =
n
∑
i =1
X i ; Ry =
n
∑
Yi e Rz =
i =1
n
∑Z
i
1.2
i =1
com
R = R = R 2x + Ry2 + Rz2
1.3
Professor Luciano Rodrigues Ornelas de Lima
e-mail: [email protected]
Sala 5016 – Bloco A
4
onde R = R é a intensidade da resultante. De maneira gráfica, obtém-se a resultante
pela construção do polígono das forças. Quanto à aplicação do polígono das forças, é
de notar que seu uso se torna prático apenas no caso particular de forças coplanares
porque, no caso geral (espaço tri-dimensional), a construção deveria ser executada
em projeções seguindo as regras da geometria descritiva; é então mais simples adotar
o processo analítico, conforme a equação 1.2.
Uma vez estabelecidos os processos de determinação da resultante, torna-se
fácil formular as condições de equilíbrio de forças aplicadas num mesmo ponto:
∑Pi
•
em vetores:
=0
•
em coordenadas:
•
graficamente: polígono das forças fechado.
∑ Xi
= 0;
∑ Yi
=0 e
∑ Zi
=0
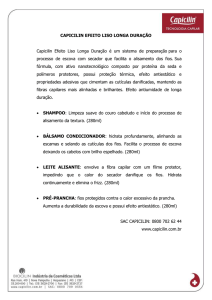
1.2.2. Decomposição de Forças (Vetores)
A seguir, tem-se a decomposição de uma dada força R em componentes
segundo a direção de eixos ortogonais. Dados os vetores presentes na Figura 1.5,
considerando-se que o sentido do ângulo é anti-horário, cada um dos vetores, A, B e C
pode ser definido segundo suas componentes nas direções, x, y e z, respectivamente.
Sendo assim, tem-se,
R x = A x + B x + C x
R y = Ay + B y + C y
e
R x = A . cosα + B cosβ + Ccosγ
R y = A . senα + B senβ + Csenγ
sendo
R x = R . cosδ
R y = R . senδ
Figura 1.5 – Decomposição de vetores
e finalmente
Ry
δ = arctg
Rx
Exemplo Numérico
Dados:
•
•
•
A = 3; α = 30o
B = 2; β = 120o
C = 1; γ = 165o
Resolvendo, tem-se,
Rx = 3 . cos 30o + 2 . cos 120o + 1 . cos 165o
Rx = 3 . 0,866 + 2 . (-0,500) + 1 . (-0,966)
Rx = 2,600 – 1,000 - 0,966 = 0,634
1.4
1.5
1.6
1.7
Professor Luciano Rodrigues Ornelas de Lima
e-mail: [email protected]
Sala 5016 – Bloco A
5
Ry = 3 . sen 30o + 2 . sen 120o + 1 . sen 165o
Ry = 3 . 0,500 + 2 . (0,866) + 1 . (0,259)
Ry = 1,500 + 1,732 + 0,259 = 3,491
R = R 2x + Ry2 = 0,634 2 + 3,4912 = 12,584
R = 3,547
3,491
δ = arctg
0,634
δ = 79o46’12”
1.3. Forças Coplanares Aplicadas na Mesma Chapa Rígida
1.3.1. Momento Estático
A chapa “rígida” é o equivalente do corpo rígido usado em problemas planos.
Para facilitar o estudo de um sistema de forças coplanares, torna-se indispensável
introduzir a noção de momento estático de um força em relação a um ponto do plano
das forças. O momento estático M, em relação a um ponto O, de uma força F, é
definido como o produto da força F pelo braço de alavanca d, conforme apresentado
na Figura 1.6. Nesta figura pode-se perceber que o dedo polegar indica o sentido do
momento, enquanto os quatro dedos restantes indicam o sentido do giro.
M=F.d
90o
0
90o
F
d
Plano α = F (reta)
e o ponto 0
Figura 1.6 – Momento estático
A unidade do momento é força vezes comprimento, ou seja, N.m e é indicado
por uma seta dupla para diferenciar do vetor força.
Professor Luciano Rodrigues Ornelas de Lima
e-mail: [email protected]
Sala 5016 – Bloco A
6
1.3.2. Binário
Inicialmente, apresenta-se o caso de um sistema composto de duas forças
paralelas que mostrará logo a utilidade do conceito do momento estático. O momento
de um binário em relação a qualquer ponto do plano é igual ao produto da força pela
distância entre as forças. Aplicando a definição de momento para F e –F em relação
ao ponto qualquer 0, tem-se,
Sentido do giro
0
M 0 = F . a – F (a + d)
F
90o
-F
o
90
M0 = F . a – F . a – F . d
a
d
Plano α
M0 = – F . d
(sendo o sentido dado pela
regra da mão direita)
M0
Figura 1.7 – Binário – duas forças paralelas
1.3.3. Deslocamento de uma força pela aplicação de um binário
Considera-se um corpo em equilíbrio sob a ação de um conjunto de forças e de
momentos. Pode-se deslocar uma força paralela a si mesma mais o efeito de um
binário sem alterar o equilíbrio do corpo.
Seja a força F aplicada em um
corpo em equilíbrio.
Há no corpo outras forças não
mostradas que o mantêm em
equilíbrio.
Ao aplicar-se sobre o corpo em
equilíbrio duas forças F’ e –F’
iguais e opostas, não se altera o
seu equilíbrio. Admite-se que a
força F’é igual à força F.
A força F anula-se com a força –F’
ficando só a força F’ aplicada em A
mais o binário M = F . d.
Assim, a força F desloca-se
paralelamente a si mesma,
aplicada num ponto desejado, no
caso o ponto A, mais um momento
do binário M = F . d.