34
CAPÍTULO II
MÁQ UINAS DE INDUÇÃO
2.1) INTRODUÇÃO
A máquina de indução é a mais simples das máquinas elétricas rotativas, seja sob o ponto de
vista de sua construção, seja sob o ponto de vista de sua operação. O seu principal campo de aplicação é o acionamento, isto é, ela opera sempre como motor. Apesar de eletricamente ser possível a
máquina de indução funcionar como gerador, são raros os exemplos neste campo de aplicação. Nas
fábricas e plantas industriais os motores de indução são encontrados às centenas. Assim, ao longo
deste capítulo, a menos que se afirme o contrário, a máquina de indução será sempre considerada
motor. Será visto posteriormente, seu papel como gerador e como freio.
Como toda máquina elétrica rotativa, o motor de indução possui uma parte fixa, o estator ou
armadura, e uma parte que gira, o rotor. Não há, praticamente, nenhuma diferença entre o estator
de um motor ou gerador síncrono e o estator de um motor de indução de mesma potência, mesmo
numero de polos, etc. O rotor é que é diferente. Enquanto nas máquinas síncronas o rotor de polos
salientes é uma montagem comum, nos motores de indução ela não existe: todos os rotores de motores de indução são de polos lisos. Como toda máquina rotativa, os núcleos do rotor e do estator
são montados com chapas de aço silício, de granulometria orientada, para reduzir a relutância do
circuito magnético e as perdas magnéticas devidas ao fenômeno das correntes parasitas. Os pacotes
de chapas de aço são perfurados em diversas formas (circular, retangular, etc) criando as ranhuras.
Enquanto o estator é fixado em bases metálicas ou de concreto, o rotor é montado sobre um eixo de
aço que se acopla, mecanicamente, ao eixo da máquina a ser acionada.
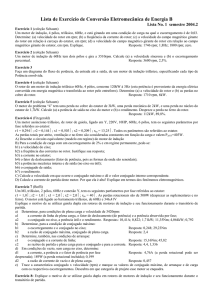
a: Estator; b: Rotor; c: Tampas laterais; d: Ventilador; e: Grade de ventilação
f: Caixa de terminais; g: Anéis deslizantes; h: escovas e porta escovas
Fig. 2.1 – Partes componentes de um motor de indução
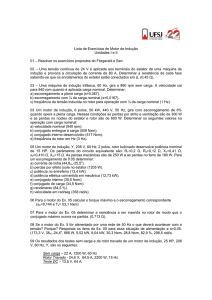
A figura 2.1 mostra as partes componentes de um motor de indução. Os dois tipos de rotor
estão mostrados com mais detalhes na figura 2.2.
35
Os motores de indução podem ser monofásicos ou polifásicos (trifásicos). Os motores de indução monofásicos podem ser estudados como um caso particular dos motores trifásicos.
Enquanto os motores de indução trifásicos são os acionadores mais comuns utilizados na indústria,
praticamente em qualquer nível de potência, o principal campo de aplicação dos motores monofásicos é o acionamento de pequenas cargas, destacando-se as de uso doméstico (bombas dágua, geladeiras, ventiladores e outros). Como tais cargas são de pequena potência, menor do que 1 kW, eles
recebem, algumas vezes, o nome de motores fracionários. Os motores monofásicos de potência
maior do que 1 kW são usados no acionamento de cargas de uso rural e comercial, onde a tensão
disponível é quase sempre monofásica. O estudo que será feito se inicia com os motores trifásicos.
Isto se justifica pelo fato de a operação e mesmo a construção de um motor trifásico ser mais simples do que a de um monofásico.
Fig. 2.2 – Tipos de rotor de motor de indução
Nas ranhuras do estator está montado um enrolamento trifásico, conforme caracterizado no
capítulo anterior, que será percorrido por uma corrente trifásica equilibrada quando o motor for ligado à rede elétrica. Será criada a FMM girante do estator, conforme definido no capítulo I, que vai
girar a uma velocidade definida pela freqüência da rede e número de polos do motor. As ranhuras
do rotor também recebem um segundo enrolamento trifásico que é uma reprodução do enrolamento
do estator, quando o rotor for do tipo rotor bobinado1. Um outro tipo de rotor é o chamado rotor em
gaiola de esquilo ou, simplesmente, rotor em gaiola que é o tipo mais usado.
O enrolamento do rotor bobinado é, em geral, ligado em estrela e os terminais de cada uma
das fases são soldados a três anéis de cobre montados sobre o eixo (fig. 2.2c), isolados entre si e do
eixo, que lhe dão o seu outro nome: rotor em anéis. Sobre eles deslizam escovas de carvão que irão
ligar os terminais do enrolamento a um reostato trifásico que terá um papel importante na partida do
motor, como se verá mais adiante.
O rotor em gaiola não apresenta a forma convencional de um enrolamento, isto é, ele não é
feito de fios enrolados formando bobinas, como o rotor bobinado. O seu “enrolamento” é feito de
barras de cobre ou de alumínio que se acham curto-circuitadas nas suas extremidades por dois anéis
chamados anéis de curto-circuito que lhe dão o outro nome: rotor em curto-circuito. A forma do
conjunto lembra uma gaiola de esquilo. Como se percebe, trata-se de um enrolamento muito mais
simples do que o de rotor bobinado e que tem uma propriedade que o rotor bobinado não tem: ele
reproduz o número de polos do enrolamento do estator. Se o estator é um enrolamento de 2 polos, o
rotor formará, por indução, dois polos; se o enrolamento do estator é de 4 polos, serão formados 4
polos no rotor. Isto não ocorre com o rotor bobinado cujo enrolamento deve ser igual ao do estator
em número de polos e de fases.
1
Este tipo de rotor e seu campo de aplicação serão estudados mais adiante.
36
2.2) ESCORREGAMENTO
Conforme foi visto no capítulo I, o sentido de atuação do conjugado eletromagnético de uma
máquina elétrica rotativa que opera como motor é no mesmo sentido da rotação. O rotor tende a
acompanhar o campo girante do estator, com a sua FMM atrasada do ângulo de carga δ em relação
à FMM do estator. Enquanto a FMM girante do estator é produzida por correntes trifásicas equilibradas resultantes da tensão aplicada nas três fases do enrolamento, a FMM do rotor tem sua origem
em correntes trifásicas induzidas no seu enrolamento pelo fluxo girante do estator. Assim sendo, só
será possível haver correntes induzidas no rotor se, de acordo com a lei de Lenz-Faraday, houver
uma variação de fluxo através das bobinas que compõem o enrolamento. Ou, dito de outra forma, se
os condutores das bobinas “cortarem” as linhas de força do fluxo girante do estator. Para que as
linhas de força do fluxo girante do estator sejam “cortadas” é necessário que o rotor gire a uma velocidade diferente da velocidade desse fluxo, isto é, entre a velocidade síncrona do fluxo girante do
estator e a velocidade mecânica do rotor deve haver uma velocidade relativa.
Quando a máquina de indução é motor, a rotação do rotor é menor do que a velocidade síncrona do campo girante do estator. Se ela funciona como gerador, o rotor deve ser acionado a uma
velocidade maior do que a velocidade síncrona. O conjugado eletromagnético resultante atua em
sentido oposto ao da rotação. Esta diferença entre as duas velocidades é chamada escorregamento e
ela é sempre tomada em valores percentuais ou em p.u. da velocidade síncrona. Chamando de n1 a
velocidade síncrona do campo girante do estator e n a velocidade do rotor, o escorregamento será
definido pela equação [2.01].
n −n
s= 1
[2.01]
n1
]
Pode-se reescrever a equação [2.01] explicitando a rotação do motor, isto é:
n = n1 (1 − s )
[2.02]
A freqüência f2 das tensões e correntes induzidas no rotor será, portanto, de acordo com a
equação [1.02], igual a:
P(n1 − n )
f2 =
[2.03]
120
P é o número de polos do rotor que reproduz o mesmo número de polos do estator. Dividindo membro a membro as equações [2.03] e [2.01] podemos escrever:
f2 = s
Pn1
= sf1
120
[2.04]
Substituímos f por f1 e n por n1 na equação [1.02] para caracterizar grandezas do estator.
Daqui por diante, as grandezas do estator serão identificadas com o índice 1 e as do rotor, com o
índice 2. A velocidade do rotor, que é a velocidade do motor, será sempre designada por n. Esta
freqüência do rotor recebe o nome de freqüência de escorregamento. Na partida, a velocidade do
motor é zero, portanto, o escorregamento é igual a 100% ou 1 p.u., isto é, a freqüência de escorregamento é igual à freqüência do estator. Se por um meio qualquer o rotor fosse impedido de girar,
por exemplo, mantendo-o mecanicamente travado, a operação do motor seria semelhante a de um
37
transformador em que o estator seria o primário e o rotor o secundário. Tal condição é facilmente
obtida no motor de rotor bobinado que, para ser travado, basta apenas levantar as escovas deslizantes sobre os anéis, o que interrompe o circuito do rotor e impede a circulação de correntes. Em funcionamento normal a velocidade n do motor se aproxima da velocidade síncrona. Os valores usuais
de escorregamento, quando os motores operam nas suas condições nominais, são de 1 a 4%. Quando operam a vazio, sua velocidade é quase igual à velocidade síncrona. A velocidade do rotor jamais poderá alcançar a velocidade síncrona, pois se isto ocorresse não haveria velocidade relativa
entre elas, condição essencial para haver conjugado eletromagnético. Porém, os fasores das FMM
do campo girante do estator e do rotor devem, evidentemente, girar à mesma velocidade e manter o
mesmo ângulo de carga entre eles.
A FMM do rotor gira em relação a ele próprio com uma velocidade (n1-n) conforme mostra
a equação [2.03]. O rotor gira à velocidade n. Portanto, em relação ao estator a FMM do rotor gira à
velocidade
(n1-n) + n = n1,
ou seja, a mesma velocidade da FMM do campo girante do estator.
2.3) TENSÕES INDUZIDAS NO ESTATOR E NO ROTOR
O fluxo girante de entreferro ou fluxo magnetizante φm criado no estator enlaça os respectivos enrolamentos, induzindo em cada um deles uma tensão E por fase. O seu valor eficaz é dado
pela equação [2.05]. (Para melhor entendimento das equações que serão escritas, o rotor será considerado sempre como bobinado. O caso do rotor em gaiola será estudado em seguida).
E = 4,44 N fs fφm K d K p = 4,44 N fs fφm K b
[2.05]
Com relação ao estator, a equação [2.05] pode ser reescrita como segue:
E1 = 4,44 N1 f1φm K b1
[2.06]
Kb1 é o Fator de Bobinagem do enrolamento do estator, N1 o número de espiras por fase em
série, f1 a freqüência da rede a que está ligado o motor.
Com relação ao rotor, é preciso distinguir duas situações: a primeira, quando o rotor está
travado e a segunda, quando ele está girando. Quando o rotor está travado, a tensão induzida em
cada fase do enrolamento será igual a:
E2 = 4,44 N 2 f1φm K b 2
[2.07]
Kb2 e N2 têm o mesmo significado de [2.06], só que referente ao rotor. Dividindo membro a membro
[2.06] e [2.07], obtém-se a equação [2.08]
:
E
E1
NK
= 1 b1 = K e ∴ E2 = 1
[2.08]
E2 N 2 K b 2
Ke
Ke é chamada de relação de transformação de tensões. É a mesma relação que aparece no
transformador, relação entre os números de espiras do enrolamento primário (estator) e do secundá-
38
rio (rotor) de uma mesma fase, só que aqui multiplicada pelos respectivos fatores de bobinagem. No
N
caso dos motores de rotor bobinado, pode-se considerar Kb1=Kb2, o que tornaria K e = 1 , a mesma
N2
relação de transformação dos transformadores. Assim sendo, um motor de indução com o rotor travado opera da mesma forma que um transformador.
Quando o rotor está girando a freqüência do rotor é a freqüência de escorregamento dada
pela equação [2.04]. A tensão induzida E2r, numa fase, será:
E2 r = 4,44 N 2 f 2φm K b 2 = 4,44 N 2 (sf1 )φ m K b 2 = sE2
[2.09]
Logo, a tensão induzida no rotor girando é igual à tensão induzida com o rotor travado,
multiplicada pelo escorregamento.
2.4) IMPEDÂNCIAS DO ESTATOR E DO ROTOR
O fluxo φm que aparece nas equações acima é o fluxo que atravessa o entreferro, criado pela
componente magnetizante da corrente do estator. Porém, as correntes do estator e do rotor produzem também os chamados fluxos de dispersão do estator e do rotor, que não chegam a atravessar o
entreferro. Por exemplo, as linhas de força ao redor das cabeças das bobinas do estator ou do rotor.
Como estes fluxos de dispersão circulam pelo ar, cuja permeabilidade magnética é constante, eles
podem ser considerados diretamente proporcionais às respectivas correntes do estator e do rotor e
em fase com elas. Estes fluxos enlaçam uma parte dos seus respectivos enrolamentos e induzem
neles tensões, da mesma forma que o fluxo φm de entreferro. A expressão das tensões induzidas por
esses fluxos, a partir da lei de Lenz-Faraday, pode ser escrita sob a seguinte forma:
ed = − L
di
dt
[2.10]
L é a indutância de dispersão do enrolamento considerado. Sendo i = I max sen ωt , a equação
[2.10] pode ser escrita conforme [2.11]:
ed = − I maxωL cos ωt
[2.11]
O valor máximo, em módulo, será E m = I maxωL . O valor eficaz será obtido dividindo ambos
os membros por 2 . Para o estator e rotor as tensões eficazes induzidas pelos respectivos fluxos de
dispersão serão: (o sinal negativo devido à lei de Lenz está sendo mantido para mostrar, claramente,
que a tensão induzida na bobina é igual e oposta à queda de tensão na reatância indutiva correspondente).
:
Ed 1 = − I1ωL1 = − jI1 X 1 Ed 2 = − I 2ωL2 = − jI 2 X 2 r = − jI 2 X 2 s
[2.12]
Ed1 e Ed2 são as tensões induzidas no estator e no rotor pelos respectivos fluxos de dispersão,
iguais e opostas às respectivas quedas de tensão nas reatâncias de dispersão X1 e X2r. I2 é a corrente
do rotor por fase. As reatâncias são iguais a:
39
X 1 = 2πf1L1 ; X 2 r = 2πf 2 L2 = 2π (sf1 )L2 = sX 2
[2.13]
X2r é a reatância de dispersão do rotor girando, portanto, reatância à freqüência f2; X2 é a
reatância do rotor travado, à freqüência f1. L1 e L2 são as correspondentes indutâncias de dispersão.
Portanto, a reatância com o rotor girando é igual à reatância com o rotor travado multiplicada pelo
escorregamento.
A corrente I1 que circula por uma fase do estator é, de acordo com a lei de Ohm, igual a:
I1 =
V1 + E1 + Ed 1
∴ V1 = (− E1 ) + (− Ed 1 ) + R1I1
R1
[2.14]
A tensão por fase V1 aplicada ao motor é equilibrada pelas tensões induzidas pelos fluxos
magnetizante e de dispersão e pela queda de tensão na resistência ôhmica R1 do enrolamento. Substituindo Ed1 pelo seu valor dado em [2.12], será obtida a equação [2.15]:
V1 = (− E1 ) + I1R1 + jI1 X 1 = (− E1 ) + I1Z1
[2.15]
Esta equação é chamada equação de equilíbrio de tensões do estator. Pode-se fazer a seguinte leitura: a tensão aplicada a uma fase do enrolamento do estator possui três componentes, a
primeira, (− E1 ) , equilibra a tensão E1 induzida no próprio enrolamento do estator pelo fluxo de
entreferro; a segunda, I1R1, igual à queda de tensão na resistência própria do enrolamento; a terceira,
a queda de tensão jI1X1 na reatância de dispersão X1, que equilibra a tensão induzida Ed1 pelo fluxo
de dispersão do estator. A componente (− E1 ) é igual à queda de tensão jI m X m na reatância magnetizante do motor como se verá na seção 2.7.
Algumas vezes, para simplificar a análise da operação do motor de indução, a queda de tensão I1Z1 na impedância é desprezada, pois seu valor é pequeno, comparado com o valor de E1. A
equação [2.14] torna-se então V1 ≅ E1 . A equação [2.06] permite escrever:
V1 ≅ E1 = 4,44 N1 f1φm K b1 ∴ φm =
V1
4,44 N1 f1K b1
[2.16]
Sendo a tensão V1 constante, o fluxo de entreferro φm torna-se constante e praticamente independente da carga que o motor aciona. Isto quer dizer que, tal como no transformador, o fluxo
magnetizante de entreferro, com o motor operando a vazio, é o mesmo com o motor operando a
plena carga. A equação [2.16] permite determinar qual a tensão mais adequada a ser aplicada ao
motor quando ele é ligado a uma rede de freqüência diferente da nominal.
Quanto ao rotor, a equação de equilíbrio é mais simples, pois não há tensão aplicada. Estando o motor operando, a tensão sE2, induzida pelo fluxo de entreferro, será equilibrada somente pela
queda de tensão na impedância do rotor, ou seja:
sE2 = I 2 (R2 + jsX 2 ) ∴ I 2 =
sE2
R2 + jsX 2
[2.17]
40
2.5) CORRENTES DO ESTATOR E DO ROTOR
As correntes I1 e I2, definidas pelas equações [2.14] e [2.17], ao circularem pelos respectivos
enrolamentos criam as FMM que se compõem para criar um fluxo resultante. Os seus valores máximos são dados pelas equações [2.18] e [2.19]:
Fm1 =
m1
4 N1
K b1 2 I 1
2
πP
[2.18]
Fm 2 =
m2
4N2
Kb2 2 I 2
πP
2
[2.19]
Nestas equações, o número de fases do estator é igual a m1 e o do rotor m2. Os valores máximos das correntes, Im1 e Im2 foram substituídos por 2I1 e 2I 2 , para introduzir seus respectivos
valores eficazes. A soma vetorial das equações [2.18] e [2.19] dá a FMM resultante Fer que está
associada ao fluxo resultante φer. Tal como no transformador, este fluxo resultante deve ser, praticamente, igual ao fluxo φm criado pela componente magnetizante, isto é:
Fm1 + Fm 2 = Fer =
4 2 m1
4 2 m2
4 2 m1
K b1 N1 I 1 +
K b2 N 2 I 2 =
K b1 N1 I m
πP 2
πP 2
πP 2
[2.20]
Eliminando os fatores comuns pode-se escrever:
m1K b1 N1I1 + m2 K b 2 N 2 I 2 = m1K b1 N1I m
[2.21]
Teoricamente, se o motor gira a vazio, não há carga, isto é, a corrente I2 é nula. (Na realidade esta situação não existe, pois mesmo girando a vazio o motor possui uma pequena carga constituída pelo atrito de seus mancais, o atrito com o ar, a própria ventilação e as perdas magnéticas).
Portanto, a vazio, a corrente I1 é a corrente magnetizante.2 Se o motor é acoplado a uma carga, então aparece no rotor a corrente I2 e a corrente do estator passa de Im para I1, ou seja, à corrente Im se
soma uma componente que resulta em I1, de modo a manter o fluxo de entreferro inalterado. A equação pode ser reescrita conforme abaixo:
m2 K b 2 N 2
I 2 = I m ∴ I1 = I m + I 2'
[2.22]
m1K b1 N1
mK N
I
mK N
Foi feito I 2' = − 2 b 2 2 I 2 = − 2 , sendo K i = 1 b1 1 a relação de transformação de
m1K b1 N1
Ki
m2 K b 2 N 2
I1 +
correntes. I 2´ é a corrente I2 do rotor referida ao estator.
2
Como será visto mais adiante, na realidade, a corrente a vazio do motor possui duas componentes: a corrente magnetizante que é a maior e a corrente que alimenta as perdas magnéticas, quase sempre desprezíveis.
41
Se m1=m2 e Kb1=Kb2, como ocorre no rotor bobinado, a relação de correntes se torna igual à
1
do transformador, ou seja, K i =
.
Ke
2.6) NÚMERO DE POLOS E DE FASES DO ROTOR EM GAIOLA
Nas equações anteriores que se referem ao rotor, aparecem os parâmetros número de fases
m2 e número de espiras em série por fase N2. Quando se trata do rotor bobinado, m2=m1, pois neste
tipo de rotor o enrolamento é construído com o mesmo número de polos e de fases do enrolamento
do estator. Quando o rotor é em gaiola, o número de fases do rotor e o número de espiras em série
não são claramente visualizados, pois o rotor não possui um enrolamento convencional semelhante
ao do estator, mas várias barras unidas em paralelo por dois anéis, conforme mostra a figura 2.2a.
Se o enrolamento de um rotor bobinado de dois polos fosse substituído por três barras, defasadas espacialmente 120º elétricos, unidas em suas extremidades por dois anéis, seria formada uma
gaiola de apenas três barras. (Fig. 2.03a)
Fig. 2.03 – Número de fases do rotor em gaiola
As tensões induzidas em cada uma das barras pelo fluxo girante magnetizante serão, respectivamente, Ea,,Eb e Ec, defasadas entre si, no tempo, de 120º. O diagrama fasorial mostra que no
rotor foi criado um sistema trifásico. Nesse caso, o número de barras do rotor é igual ao número de
fases. Se, em lugar de três o rotor tivesse 12 barras, como na figura 2.03b, cada uma delas defasa360 o
das, no espaço, de um ângulo α =
= 30 o elétricos (no caso, igual a 30o graus geométricos), as
12
tensões induzidas em cada barra estariam defasadas de 30º elétricos no tempo, conforme mostra o
diagrama fasorial. Pode-se concluir que para uma máquina de dois polos o número de fases do rotor é igual ao número de barras.
Por sua vez, N2 representa o número de espiras em série de uma bobina, por fase. Uma bobina, seja de uma só espira ou de N2 espiras, possui dois lados, isto é, cada lado é a metade de uma
bobina. Quando se trata de bobina de uma só espira, cada lado é igual a um condutor. Como no rotor em gaiola cada barra é uma única fase de um só condutor, cada barra representa meia espira em
série por fase. Em outras palavras, no motor de indução de dois polos, o número de espiras em série
1
por fase é sempre igual a . Além disto, o Fator de Bobinagem Kb2 para o rotor em gaiola será
2
sempre igual a 1.
Para um número p de pares de polos ou P polos, as seguintes igualdades podem ser escritas
para os dois parâmetros m2 e N2:
42
m2 =
Q2 2Q2
=
p
P
N2 =
p P
=
2 4
[2.23]
Q2 é o número de barras do rotor.
Os parâmetros resistência por fase R2 e reatância por fase sX2 se referem à resistência e reatância de uma barra. A corrente I2 é a corrente que circula por uma barra e a tensão sE2 por fase é a
tensão induzida em uma barra.
2.7) CIRCUITO EQUIVALENTE
As equações [2.17] e [2.24] mostram as relações existentes entre as grandezas elétricas em
uma fase no rotor de um motor de indução. Estas relações podem ser visualizadas, pelos circuitos
elétricos da fig. 2.04.
Fig. 2.04 – Circuito equivalente de uma fase do rotor
A equação [2.17] foi obtida a partir do circuito da fig. 2.04a e a [2.24], a partir do circuito
da figura 2.04b.
E2
I2 =
[2.24]
R2
+ jX 2
s
A equação [2.24] é a mesma equação [2.17] em que o numerador e o denominador foram
divididos por s. Esta simples operação traz uma mudança conceitual importante na equação [2.17],
pois substitui a tensão induzida sE2, com o rotor girando, por E2, tensão induzida com o rotor travaR
do e introduz a grandeza fictícia 2 , uma resistência variável com o escorregamento. Sendo E2 e X2
s
grandezas de freqüência igual à do estator, a corrente do rotor calculada pela equação [2.24] é
uma corrente de mesma freqüência do estator, mesmo estando o rotor girando. Assim, o rotor girando a uma velocidade n correspondente ao escorregamento s, pode ser substituído, em termos de
grandezas elétricas, por um rotor travado desde que sua resistência por fase R2 seja substituída por
R2
. Isto simplifica o entendimento da operação do motor, pois ela se assemelha à de um transfors
mador não somente na condição de rotor travado, mas também na condição de rotor girando.
43
Por outro lado, a equação [2.14] corresponde exatamente à equação do primário de um transformador e pode ser representada pelo circuito elétrico equivalente da fig. 2.05.
Fig. 2.05 – Circuito equivalente de uma fase do estator
Os circuitos das figuras 2.04 e 2.05 estão acoplados magneticamente pelo fluxo magnético
girante do entreferro que, conforme visto anteriormente, induz em cada uma das fases do estator e
do rotor as tensões E1 e E2. O acoplamento será representado pelas bobinas do estator e do rotor
formando o circuito equivalente completo de uma fase do motor, como mostra a fig. 2.06.
Fig. 2.06 – Circuito equivalente completo de uma fase do motor de indução
Para que o circuito equivalente da fig. 2.06 seja apenas um circuito elétrico, é necessário
eliminar o acoplamento magnético de modo a se poder aplicar todas as leis básicas dos circuitos
E
elétricos. Para isto, a tensão E 2 será substituída por 1 , de acordo com [2.08] e I 2 por − I 2´ K i , de
Ke
acordo com [2.22]. Substituindo estes valores na equação [2.17] obtém-se a equação [2.25].
I 2´ K i =
E1
Ke
R2
+ jX 2
s
∴ I 2´ =
E1
R2
+ jX 2 K e K i
s
[2.25]
A equação [2.25] indica que o acoplamento magnético pode ser eliminado desde que a corrente I 2 seja substituída por I 2´ e a impedância do rotor seja multiplicada por KeKi . Os terminais do
circuito do rotor poderão então ser ligados diretamente à tensão E1, eliminando-se a tensão E2. (O
sinal negativo da corrente I 2´ foi desconsiderado para não complicar a equação, pois ele significa
apenas que ela tem um sentido contrário a I 2 ). A impedância do rotor multiplicada por KeKi é chamada de impedância do rotor referida ao estator ou seja:
44
R2'
R
+ jX 2' = 2 + jX 2 K e K i
s
s
[2.26]
O circuito elétrico da fig. 2.07 é o resultado das substituições efetuadas. Ele está de acordo
com as equações [2.15] e [2.25]. É chamado circuito equivalente de um motor de indução, para
uma fase. A tensão E1 é comum aos circuitos do estator e do rotor. Ela é induzida pelo fluxo magnetizante do entreferro φm, o qual, por sua vez, é criado por uma corrente magnetizante Im. A tensão E1
é igual e oposta à queda de tensão jImXm, isto é, (− E1 ) = jI m X m . Na figura vê-se que além da reatância Xm está indicada uma resistência Rm pela qual passaria uma corrente não indicada na figura.
Essa corrente é que alimenta a perda magnética do estator ou perda no ferro que ocorre no núcleo
do estator devida ao fenômeno da histerese magnética e das correntes parasitas. Essa corrente é
muito pequena comparada com a corrente Im e, por isto essa resistência é eliminada do circuito, como se verá mais adiante. Todavia, a perda magnética correspondente não é desprezada, ela é incorporada à perda mecânica do rotor, formando as perdas rotacionais a vazio que são determinadas no
ensaio a vazio do motor. Neste ensaio, o motor gira sem carga no seu eixo e a corrente que circula
pelo estator é a soma da corrente magnetizante com a corrente que alimenta as perdas magnéticas
formando a corrente a vazio do motor, Io
Fig. 2.07 – Circuito elétrico equivalente de uma fase de um motor de indução
2.8) DIAGRAMA FASORIAL
As equações [2.15] e [2.25] bem como a fig. 2.07 permitem traçar o diagrama fasorial do
motor de indução que nos fornece uma radiografia das relações entre as grandezas que atuam durante a operação do motor, fig. 2.08. O diagrama fasorial será construído no primeiro e no terceiro
quadrantes. No primeiro quadrante estarão representadas as grandezas que aparecem no circuito
equivalente e as relações de fase entre elas. No terceiro quadrante serão representadas as grandezas
reais do rotor, isto é, não referidas ao estator. Portanto, não aparecem no circuito equivalente.
Para iniciar a construção do diagrama, o fluxo φm será tomado como fasor de referência e posicionado na horizontal. A corrente magnetizante Im que o cria está em fase com ele. Pela lei de
Lenz-Faraday as tensões induzidas E1 e E2 estão atrasadas 90º de φm. A tensão E2, que no diagrama
R
do circuito equivalente não é representada, possui duas componentes: a queda de tensão I 2 2 , em
s
fase com I 2 e a queda de tensão jI 2 X 2 , adiantada 90° de I 2 . O ângulo de fase ψ2 entre a corrente I2
45
e a tensão E2 pode ser determinado pelo seu cosseno, fator de potência do rotor, isto é,
R2
.
cos Ψ2 =
R2
+ jX 2
s
No primeiro quadrante, a corrente Im em fase com φm, se soma com a corrente que alimenta
as perdas magnéticas do rotor para formar a corrente Io. A corrente I 2´ é de sentido oposto a I 2 e igual
a I2 multiplicada por Ki, ou seja, é a corrente I2 referida ao estator. A soma de Io e I 2´ é igual à corrente I 1 . A tensão V1 será a soma de (− E1 ) = jI m X m com a queda de tensão I1Z1 = I1 ( R1 + jX 1 ) .A
queda de tensão jImXm está adiantada 90° de Im. Observar que E1 poderia ser calculado também pela
R'
soma das quedas de tensão I 2' 2 e jI 2' X 2 não representadas no diagrama. O cosseno do ângulo
s
entre V1 e I 1 é o fator de potência do motor.
Fig. 2.08 – Diagrama fasorial do motor de indução
.
Com relação ao conjugado eletromagnético que o motor de indução desenvolve, uma análise
do diagrama fasorial permite tirar uma expressão mais adequada do que a expressão geral definida
pela equação [1.32]:
P µ πDl
C =− ⋅ o ⋅
Fe Fr sen δ er
[1.32]
2 2
g
Fe e Fr são, como já foi visto, os valores máximos das respectivas FMM do estator e do rotor. O ângulo de carga δer é o ângulo espacial entre os eixos das FMM, ou seja, entre os eixos da
corrente magnetizante Im e da corrente I2 do rotor, indicado na figura 2.08. Pela figura, temos:
δ er = 90 o + Ψ2 ∴ sen δ er = cos Ψ2
46
Por outro lado, podemos substituir Fe e Fr pelos seus valores dados pela equação [2.20].
Substituindo estas expressões na equação [1.32], substituindo Im por φ m = Lm I m e fazendo as simplificações necessárias obtém-se a equação [2.27]:
C = Kφ m I 2 cos Ψ2
[2.27]
K é uma constante que engloba todas as constantes. O fator de potência do rotor é um valor
muito alto, principalmente para os motores de rotor em gaiola. Em muitos casos práticos ele é considerado igual a um. Pode-se interpretar a equação [2.27] da seguinte maneira: o conjugado desenvolvido pelo motor de indução é diretamente proporcional ao produto do fluxo magnetizante pela
componente ativa da corrente do rotor.
2.9) ANÁLISE DO CIRCUITO EQUIVALENTE
A maior utilidade do circuito equivalente está na facilidade que ele oferece para se analisar o
desempenho do motor. A análise é feita para uma fase supondo uma operação equilibrada da máquina, isto é, o que ocorre numa fase ocorre igualmente nas demais. As constantes do circuito equivalente são determinadas pelos ensaios a vazio e em curto-circuito do motor.
Para melhor entender o desempenho do motor através de seu circuito equivalente, a resistênR
cia variável 2 introduzida pela equação [2.24], considerando que o escorregamento s é um númes
ro menor do que 1, pode ser considerada como soma da própria resistência R2 com uma resistência
adicional Rx, ou seja:
R2
R
= R2 + R x ∴ R x = 2 (1 − s )
s
s
[2.28]
Portanto, o circuito equivalente da fig. 2.07 pode ser substituído pelo da fig. 2.09.
Fig. 2.09 – Forma alternativa do circuito equivalente
Chamando P1 a potência que entra pelos terminais do motor, ∆Pj1 a perda jóulica na resistência do enrolamento do estator e ∆Pfe a perda magnética no núcleo do estator e sendo ϕ o ângulo
de fase entre V1 e I1, a potência que será transferida ao rotor pelo campo magnético girante, através
do entreferro, denominada potência eletromagnética, será igual a:
47
Pem = P1 − (∆Pj1 + ∆Pfe ) = V1 I 1 cos φ − (ΑPj1 + ∆Pj 2 )
[2.28]
Esta é a expressão da potência eletromagnética vista pelo lado do estator. Quando vista pelo
lado do rotor, ela será igual à potência consumida na única resistência existente no rotor, ou seja:
Pem = I 2'2
R2
R
= I 2'2 R2 + I 2' 2 2 (1 − s ) = sPem + (1 − s )Pem
s
s
[2.29]
Portanto, da potência que é transferida do estator para o rotor, uma parte, I 22 R2 , é dissipada
R
sob a forma de calor na resistência própria do rotor e a outra, I 22 2 (1 − s ) , a maior delas, é “consus
R
mida” na resistência fictícia 2 (1 − s ) . A potência “consumida” na resistência fictícia do circuito
s
equivalente é a potência mecânica que será utilizada no acionamento das cargas mecânicas acopladas ao eixo do motor. Esta potência é chamada potência mecânica interna, Pmi, isto é:
Pmi = I 22
R2
(1 − s ) = (1 − s )Pem
s
[2.30]
No rotor em movimento ocorrem as perdas mecânicas ∆Pmec (atrito + ventilação) e mais as
perdas magnéticas do rotor. Estas, sendo proporcionais à freqüência de escorregamento do rotor que
é um valor muito baixo, são sempre desprezadas. As perdas mecânicas e as perdas magnéticas do
estator quando somadas, constituem as perdas rotacionais a vazio ∆Pv. Estas perdas estão embutidas na potência mecânica interna Pmi. Para se achar a potência mecânica útil disponível no eixo do
motor é preciso subtrair de Pmi as perdas rotacionais a vazio isto é:
P = Pmi − ∆Pv
[2.31]
As perdas magnéticas significativas ocorrem no estator. Elas serão somadas às perdas mecânicas para constituir as perdas rotacionais a vazio quando, no circuito equivalente, a resistência Rm
em paralelo com a reatância magnetizante tenha sido eliminada. Quando isto não ocorrer, a potência
útil será achada subtraindo-se da potência mecânica interna somente as perdas mecânicas, pois as
perdas magnéticas já terão sido subtraídas da potência eletromagnética transferida ao rotor.
O conjugado eletromagnético interno associado à potência mecânica interna será igual a:
C mi =
m1 Pmi
ω
=
R2
(1 − s ) m I '2 R
s
= 1 2 2
ω1 (1 − s )
ω1 s
m1 I 2' 2
[2.32]
Introduzimos na equação [2.32] o fator m1 para indicar o número de fases do motor. Para um
motor trifásico m1 = 3 . Se Pmi for dada em watts e ω em rad/s, o conjugado será obtido em Nm. Da
mesma forma que em [2.32], o conjugado útil ou de saída no eixo do motor será igual a:
48
C=
P
[2.33]
ω
Os modelos de circuito equivalente das figuras 2.07 e 2.09 dão resultados bastante precisos
para o cálculo de desempenho dos motores. Estes cálculos são, em geral, trabalhosos. Por exemplo,
quando se deseja calcular a potência mecânica ou o conjugado útil, é necessário calcular a corrente
I 2' , que sempre apresenta mais dificuldades. Para reduzir este trabalho, se opta, quando é possível,
por uma simplificação do modelo, perdendo-se em precisão, mas ganhando em facilidade. Esta
simplificação está indicada na fig. 2.10 que mostra o ramo contendo a reatância Xm e a resistência
Rm tirado de sua posição original e ligado diretamente à tensão da rede. Desta forma, a corrente I 2' é
facilmente calculada por meio da equação [2.34].
Neste modelo, a tensão V1 é igual à tensão induzida E1 e o fluxo φm pode ser calculado de
acordo com a equação [2.16].
Fig. 2.10 – Modelo simplificado do circuito equivalente
I&&2' =
V&1
R'
R1 + 2 + j X 1 + X 2'
s
(
[2.34]
)
Substituindo [2.34] em [2.32], será obtida uma nova expressão do conjugado eletromagnético interno, em função das constantes do circuito equivalente.
Cmi =
m1R2'
V12
2
ω1s
R2'
R1 + + X 1 + X 2'
s
(
)
[2.35]
2
ω1 é velocidade síncrona do campo girante dada em rad/s e V1 é a tensão aplicada ao motor, por
fase, em volts. Cmi será obtido em Nm.
A análise da equação [2.35] mostra a grande influência que a tensão exerce sobre o conjugado do motor: ele varia com o seu quadrado. Os parâmetros da equação [2.35] são considerados
constantes para cada motor. Para uma tensão aplicada constante pode-se dizer que Cmi é uma função
49
somente do escorregamento, isto é, C mi = f (s ) . Tanto na equação [2.32] quanto na equação [2.35],
se forem atribuídos a s valores dentro de seu campo de variação serão obtidas curvas denominadas
características do conjugado em função do escorregamento. As curvas obtidas de uma ou da outra
equação pouco diferem na sua configuração mostrada na fig. 2.11.
O primeiro quadrante é o campo de variação do escorregamento para a operação da máquina
de indução como motor, isto é, 1≥ s > 0. É o caso mais comum de operação da máquina de indução.
Fig. 2.11 – Característica conjugadoxescorregamento de uma máquina de indução
Nesse campo, a característica de conjugado apresenta alguns pontos notáveis identificados
na figura 2.11. Se nas equações [2.32] ou [2.35] s for tomado igual a 1, resulta para o conjugado um
valor inicial chamado Conjugado de Partida, Cp. Se a equação [2.35] for derivada em relação a s e
o resultado igualado a zero, determina-se qual o valor da variável s para o qual se tem o máximo
valor de conjugado. Este valor é dado pela equação [2.36].
smax =
R2'
(
R + X1 + X
2
1
[2.36]
)
' 2
2
Substituindo este valor na equação [2.35] será encontrado o valor do conjugado máximo do motor.
Cmax =
m1V12
(
)
2
2ω1 R1 + R12 + X 1 + X 2'
[2.37]
No primeiro quadrante está indicada também uma curva designada por Cr que representa a
característica mecânica da máquina que está sendo acionada pelo motor. No caso, trata-se de uma
característica parabólica típica de várias máquinas como sopradores de ar, exaustores, bombas centrífugas, etc. Se o motor opera na sua condição nominal, o ponto de encontro das duas características representa esta condição operacional em que o conjugado, a potência e a rotação que o motor
desenvolve são valores nominais fornecidos na sua placa de identificação.
50
O escorregamento que o motor apresenta na condição nominal de operação é o escorregamento nominal sn que, substituído na equação [2.35] fornece o conjugado nominal. Os valores de Cp
e Cmax são fornecidos, em geral, em p.u. ou percentagem do conjugado nominal.
O quarto quadrante mostra uma curva inversa da curva do primeiro quadrante. O escorregamento assume valores negativos, ou seja, o seu campo de variação se estende para além do zero. Se
o escorregamento é negativo, isto significa que a velocidade do rotor é maior do que a do campo
girante do estator. Isto só será possível se o eixo do motor for acionado por um órgão externo, por
exemplo, uma turbina, de modo a fazer o rotor girar a uma velocidade maior do que a síncrona.
Nesta condição a máquina de indução funciona como um gerador.
Teoricamente, o campo de variação de s é 0>s>-∞, ou seja, o rotor poderia ser acionado a
velocidades muito superiores à síncrona. Se isto ocorresse, o escorregamento seria muito grande e
as perdas jóulicas do rotor, que dependem do escorregamento, conforme mostra a equação [2.29],
seriam extremamente elevadas e produziriam uma quantidade de calor tal que destruiria a máquina.
Em termos práticos, o escorregamento da máquina funcionando como gerador deve ser o mesmo,
em valor absoluto, do seu escorregamento como motor. Por questão de simetria, a fig. 2.11 mostra o
campo de variação do escorregamento do gerador de indução apenas entre 0 e –1.
É muito difícil encontrar uma máquina de indução funcionando como gerador. A sua potência de excitação (VAR necessário para criar o campo magnético girante) é muito maior do que a
potência de excitação correspondente para o gerador síncrono. Por outro lado, para um gerador de
indução operar é necessário que a rede elétrica já exista para que ele possa absorver a corrente magnetizante necessária para criar o campo magnético. Desta forma ele deve ser ligado à rede como um
motor, a vazio, e depois receber o conjugado externo para operar como gerador.
No terceiro quadrante, o campo de variação do escorregamento se estende para além de 1.
Isto significa que o rotor está sendo acionado no sentido contrário ao do campo girante do estator.
Se isto acontecesse, o escorregamento seria ainda maior do que no caso anterior em que o rotor era
acionado no mesmo sentido do campo girante do estator. Isto agravaria ainda mais o problema do
aquecimento provocado pelas perdas jóulicas do rotor. Portanto, em termos práticos, o rotor não
pode ser acionado como gerador em sentido oposto ao do campo girante.
Pode-se, entretanto, obter uma situação equivalente se, estando o motor operando normalmente, forem invertidos dois terminais da rede à qual ele está ligado. Ao se fazer isto, inverte-se o
sentido do campo girante do estator. O rotor tende a acompanhar o campo girante do estator, mas
para isto ele terá de inverter a sua rotação. Durante um curto período de tempo, a energia cinética
armazenada na massa girante do rotor o mantém girando, no mesmo sentido, até que ele pare e inverta a rotação. Durante este período, o escorregamento passa a ser:
s' =
− n1 − n n1 + n n1 + n1 (1 − s )
= 2−s
=
=
− n1
n1
n1
[2.38]
Portanto, ao se trocar dois terminais de alimentação do motor entre si, o escorregamento
inicial do motor é praticamente igual a 2 e atingiria 1 (motor parado) após um tempo muito curto.
Esta condição operacional do motor é chamada de frenagem e ela ocorre quando o motor é desligado no instante antes de inverter a rotação. Ela é conhecida na prática como plugueamento. O tempo
de frenagem deve ser muito curto para evitar a destruição do motor pelas elevadas perdas jóulicas,
se o tempo fosse longo. Se o motor não for desligado, ele inverte sua rotação, uma prática muito
usada nas plantas industriais.
51
2.10) EXERCÍCIOS RESOLVIDOS
2.10.1) Um motor de indução trifásico, rotor em gaiola, 220 V, 60 Hz, 6 polos, ligado em estrela, aciona uma carga com um escorregamento igual a 2%. As perdas rotacionais a vazio são constantes e iguais a 403 watts. As constantes do circuito equivalente têm os seguintes valores em
ohms/fase:
R1 = 0,294; R2' = 0,144 ; X1 = 0,503; X 2' = 0,209 ; Xm = 13,25; Rm = ∞
Pede-se:
a)
b)
c)
d)
e)
f)
g)
h)
i)
j)
k)
A velocidade do motor em RPM e rad/s
A corrente do estator em A.
O fator de potência do motor.
A potência de entrada.
A corrente do rotor em A.
A potência eletromagnética em watts.
A potência mecânica interna em watts.
O conjugado eletromagnético interno em Nm.
A potência útil ou de saída em watts.
O conjugado útil ou de saída em Nm.
O rendimento.
SOLUÇÃO: a partir do circuito equivalente da fig. 2.09
a) A velocidade será, de acordo com [2.02], igual a:
n = n1 (1 − s ) = 1200(1 − 0,02 ) = 1176 RPM = 123,15 rad/s (R)
b) A impedância equivalente à reatância magnetizante em paralelo com a impedância do rotor será:
1
1
1
1
1
=
+ '
=
+
∴ Z e = 5,41 + j 3,11 = 6,240∠29,89 o
0
,
144
j
Z e jX m R2
13
,
25
+ j 0,209
+ jX 2'
0,02
s
Esta impedância, somada com a do estator, Z1 = R1 + jX 1 , dará a impedância total do
motor, ou seja:
Z mot = Z1 + Z e = (0,294 + 5,41) + j (0,503 + 3,11) = 6,752 ∠32,35 o
A corrente do estator será igual a:
220
V
3
= 18,81∠ − 32,35 o (R)
I1 = 1 =
Z mot 6,752[32,35º
c) cos ϕ = cos(− 32,35º ) = 0,845 (R)
52
d) P1 = 3V1 I 1 cos ϕ = 3.220.18,18.0,845 = 6056,60 watts (R)
e) I 2' = I 1 − I m = (15,358 − j 90728) − (− 0,368 − j8,582 ) = 15,757∠ − 4,17 o |(R)
E1 e Im calculados conforme abaixo.
− E1 = jI m X m ∴ I m = −
E1
; E1 , por sua vez, é igual a:
jX m
E1 = I 1 Z e = 18,18∠ − 32,35 o × 6,240∠29,89 o = 113,44∠ − 2,46 o
Im = −
113,44[− 2,46]
= 8,59∠ − 92,46 o (R)
j13,2
f) Pem = 3I 2'2
R2'
2 0,144
= 3(15,757 )
= 5362,91 watts (R)
s
0,02
g) Pmi = (1 − s )Pem = (1 − 0.02 )5362,91 = 5255,65 watts (R). Como a resistência Rm foi desprezada, a perda magnética do estator foi transferida para o rotor e somada à perda mecânica,
cuja soma, igual a 403 watts constitui as perdas rotacionais a vazio que estão embutidas na
potência Pmi.
h) C mi =
Pmi
ω
=
5255,65
= 42,67 Nm (R)
123,15
i) P = Pmi − ∆Pv = 5255,65 − 403 = 4852,65 watts (R)
j) C =
k) η =
P
ω
=
4852,65
= 39,40 Nm (R)
123,15
P 4852,65
=
= 80,12%
P1
6056,6
2.10.2) Resolver o mesmo problema anterior utilizando o modelo de circuito equivalente
simplificado, de acordo com a figura 2.10.
SOLUÇÃO: a partir do circuito equivalente da figura 2.10
a) O mesmo resultado do item a) anterior.
b) A impedância total do motor será obtida conforme abaixo:
53
1
1
1
1
1
=
+
∴
=
+
'
0,144
Z mot
jX m
13,25
R2
'
R1 + + j X 1 + X 2
+ j (0,503 + 0,209)
0,294 +
0,02
s
Z mot = 5,24 + j 3,488 = 6,295∠33,63o
(
)
A corrente do estator será, portanto igual a:
220 o
∠0
3
I1 =
= 20,18∠ − 33,65o (R)
o
6,295∠33,63
c) cós(-33,65o) = 0,832 (R)
d) Potência de entrada: P1 = 3V1I1 cos φ = 3 × 220 × 20,18 × 0832 = 6401,12 W (R)
e) A impedância do rotor é igual a:
R'
Z rot = R1 + 2 + j X 1 + X 2' = 7,494 + j 0,712 = 7,528∠5,43o
s
220 o
∠0
3
'
= 16,873∠ − 5,43o A (R)
A corrente do rotor será: I 2 =
o
7,528∠5,43
(
)
f) Pelo modelo de circuito equivalente, não há perdas no estator. Logo, a potência eletromagnética transferida ao rotor é a própria potência de entrada, isto é:
Pem = P1 = 6401,12 W (R)
g) A potência eletromagnética transferida ao rotor se divide em duas parcelas: as perdas por
efeito joule que se dissipam e a potência mecânica interna. Esta será, portanto, igual à potência eletromagnética menos as perdas jóulicas, ou seja:
(
)
Pmi = Pem − 3 R1 + R2' I 2' 2 = 6401,12 − 3(0,294 + 0,144 )(16,873) = 6027,03 W (R)
h) Cmi =
Pmi
ω
=
6027,03
= 48,94 Nm (R)
123,15
i) P = Pmi − ∆Pv = 6027,03 − 403 = 5624,03 W (R)
2
54
j) C =
k) η =
P
ω
=
5624,03
= 45,67 Nm (R)
123,15
P 5624,03
=
= 87,86%
P1 6401,12
(R)
Análise comparativa dos resultados obtidos:
Considerando as mesmas condições para ambos os modelos de circuito equivalente, vemos
20,18
que a corrente I1 do modelo aproximado ficou
= 1,073 vezes maior do que a do modelo com18,81
pleto isto é, um aumento de apenas 7%. Quanto às correntes do rotor, a relação ficou aproximada16,873
mente a mesma de I1 , isto é:
= 1,071 . Essas diferenças podem ser aceitáveis, dependendo da
15,757
aplicação que se quer dar aos resultados. No que se refere à potência eletromagnética Pem, as dife6401,12
= 1,194 . Esta diferença é muito significativa e já não
renças percentuais aumentam, isto é:
5362,91
pode ser aceitável. Esta diferença será também significativa na potência mecânica interna e na potência útil pois em ambos os casos, essas potências são aproximadamente proporcionais ao quadrado da corrente do rotor, ou seja, a diferença de 7,1% existente entre os dois valores da corrente pas2
sa a ser (1,071) = 1,147 vezes maior na potência. O rendimento sofre também alteração significati87,86
va: passa a ser
= 1,097 vezes maior, o que para rendimento de motor é uma diferença muito
80,12
grande e inaceitável.
Em conclusão, podemos dizer que o uso do circuito equivalente aproximado oferece resultados bem diferentes dos resultados do circuito equivalente completo. Obviamente que os percentuais
obtidos podem variar de acordo com as constantes do circuito e serem mais aceitáveis ou não, porém, de uma maneira geral, não se deve usar tal modelo. A única simplificação que pode ser feita é
apenas a de eliminar a resistência Rm.
2.11) ANÁLISE DO CIRCUITO EQUIVALENTE PELO TEOREMA DE THÉVÉNIN
Na seção 2.9 afirmamos que para tornar os cálculos do desempenho do motor de indução
menos trabalhosos optou-se por um modelo de circuito equivalente conforme o da fig. 2.10 que,
todavia, produzia resultados menos precisos do que os dos circuitos completos das figuras 2.07 e
2.09. Quando se deseja dar ênfase à potência e ao conjugado do motor, que dependem da corrente
do rotor, o modelo de circuito equivalente apresentado por A.E. Fitzgerald em seu livro Máquinas
Elétricas3, baseado no teorema de Thévénin, facilita os cálculos do desempenho do motor, sem perder a precisão. No modelo de Thévénin, a resistência Rm é removida permanecendo apenas a reatân-
3
A. E. Fitzgerald; Charles Kingsley Jr; Alexander Kusko – Máquinas Elétricas- Editora McGraw-Hill do Brasil Ltda.
55
cia Xm, conforme mostra a fig. 2.12. As perdas magnéticas são transferidas ao rotor e somadas às
perdas mecânicas, formando as perdas rotacionais a vazio.
Fig. 2.12 – Circuito equivalente desprezando a resistência Rm
Os circuitos equivalentes das figuras 2.07 e 2.09 podem então ser substituídos pelos da figura 2.12a e 2.12b. Os pontos a e b dividem o circuito equivalente em duas partes distintas: à esquerda, as grandezas do estator e à direita, as grandezas referidas do rotor.
A aplicação do teorema de Thévénin, consiste em obter a impedância equivalente do estator
em série com a impedância do rotor. Dessa forma, a corrente que vai circular por todo o circuito
equivalente é a corrente do rotor. Aplicando o teorema de Thévénin entre os pontos a e b da fig.
2.12, a tensão da fonte equivalente entre os terminais a e b, estando o circuito à direita de a e b aberto, será igual a:
VTh = V1 − I m (R1 + jX 1 ) = V1
jX m
R1 + jX 1
[2.39]
A impedância de Thévénin equivalente à impedância do estator será a existente entre os pontos a e b, com os terminais da fonte de tensão V1 curto-circuitados, ou seja:
1
1
1
jX m (R1 + jX 1 )
=
+
∴ ZTh = RTh + jX Th =
ZTh Rr1 + jX 1 jX m
R1 + j ( X 1 + X m )
[2.40]
Os circuitos equivalentes da fig. 2.12 se transformam nos circuitos equivalentes da fig. 2.13
com a introdução dos valores obtidos nas equações [2.39] e [2.40].
Fig. 2.13 – Circuito equivalente do motor de indução pelo teorema de Thévénin
56
A partir do circuito equivalente de Thévénin, a corrente I 2' é facilmente determinada o que
permite calcular, em seguida, o conjugado eletromagnético pela equação [2.32]. O conjugado pode
também ser calculado, diretamente, substituindo I 2' da mesma forma como foi feito na equação
[2.35], obtida a partir do circuito simplificado da figura 2.10. As constantes R1 e X1 serão substituídas, respectivamente, por RTh e XTh e a tensão por fase do estator por VTh.. A expressão do conjugado eletromagnético interno será:
C mi
VTh2
m1 R2' '2 m1 R2'
I2 =
=
2
ω1 s
ω1 s
R2'
RTh +
+ X Th + X 2'
s
(
)
[2.41]
2
A expressão do conjugado máximo, da mesma forma, será idêntica à expressão [2.37], substituindo R1 e X1 por RTh e XTh, respectivamente, ou seja:
C max =
m1V12
(
2ω 1 RTh + RTh2 + X Th + X 2'
)
2
[2.42]
2.12) EQUAÇÕES NORMALIZADAS DO CONJUGADO
As equações [2.35] e [2.43] apresentam um grande número de parâmetros (as constantes do
circuito equivalente). É possível simplificar estas equações escrevendo-as sob a forma de valores
relativos dos parâmetros e de conjugados, substituindo os valores absolutos por valores adimensionais, em p.u. ou em porcentagem.
Se as equações [2.41] e [2.42] forem divididas membro a membro será obtida a seguinte
igualdade:
R'
2
2 RTh + RTh2 + X Th + X 2' 2
C mi
s
=
[2.44]
2
'
C max
R2
' 2
RTh +
+ X Th + X 2
s
(
)
(
)
A partir da equação [2.36] o valor de R2' pode ser obtido de acordo com [2.45]:
(
R2' = s max RTh2 + X Th + X 2'
)
2
[2.45]
Substituindo, em [2.44], R2' pelo seu valor obtido em [2.45] e fazendo as devidas reduções
algébricas obtém-se a seguinte igualdade:
57
C mi
=
C max
Nesta equação foi feito Q =
1+ Q2 +1
Q2 +1 s
s
+ max
1+
s
2
s max
[2.46]
X Th + X 2'
.
RTh
De modo semelhante pode-se obter uma relação entre a corrente do rotor, I 2' , correspondente a uma condição operacional qualquer do motor, e a corrente I 2' max correspondente ao conjugado
máximo Cmax, a partir da equação [2.32].
I 2'
I 2' max
=
(1 +
sm
1 +
s
)
2
Q2 +1 + Q2
2
Q2 +1 + Q2
[2.47]
Q tem o mesmo significado da equação [2.46]. Para a grande maioria dos motores de indução a relação Q se situa entre 3 e 7.
C
A fig. 2.14 mostra as curvas resultantes considerando agora as variáveis mi no eixo das
C max
s
no eixo das abscissas. Vê-se a pouca influência que a relação Q exerce sobre a
ordenadas e
s max
configuração das curvas, mesmo se seu valor se torna infinito.
Fig. 2.14 – Curvas normalizadas conjugadoxescorregamento
58
Fazer Q = ∞ , significa dizer que RTh é igual a zero, ou seja, é possível se desprezar a resistência do estator sem com isto introduzir erros significativos nas características dos motores. Se isto
for feito as equações [2.46] e [2.47] se simplificam4 mais ainda, ou seja:
C mi
=
C max
2
s
s max
I2
I 2 max
=
+
s max
s
2
2
s max
+1
s
[2.48]
[2.49]
2.13) VARIAÇÃO DA RESISTÊNCIA DO ROTOR: ROTOR BOBINADO
A equação [2.45] mostra que o escorregamento correspondente ao conjugado máximo é diretamente proporcional à resistência do rotor. De outro lado, a equação [2.46] mostra que o conjugado máximo não depende da resistência do rotor. Portanto, se ela for aumentada, o escorregamento
smax aumenta na mesma proporção, fazendo a curva de conjugado se deslocar para a esquerda, conforme mostra a figura 2.15.
Fig. 2.15 – Efeito do aumento da resistência do rotor
Á medida que a curva se desloca para a esquerda, o valor inicial do conjugado de partida varia, aumentando o seu valor até que o escorregamento smax seja igual a 1, isto é, o conjugado de partida é igual ao conjugado máximo. A partir deste valor, se a resistência for aumentada o conjugado
4
Ao se fazer RTh=∝ nas equações [2.46] e[2.47] elas se tornam indeterminadas. A indeterminação é levantada dividindo-se o numerador e o denominador por Q.
59
máximo se dará no segundo quadrante e o conjugado de partida passa a diminuir de valor. A possibilidade de variar a resistência do rotor só é possível no motor de rotor bobinado por meio da introdução de resistências externas, em série com as bobinas de cada fase, através dos anéis. Estas resistências são introduzidas durante o processo de partida do motor quando se deseja manter um alto
conjugado de aceleração e retiradas após o motor atingir sua velocidade de regime.
O equipamento que permite fazer este tipo de operação é chamado reostato de partida. A
fig. 2.16 mostra o diagrama esquemático de um reostato de partida. Ele introduz inicialmente, o
maior número dos estágios de resistência disponíveis no momento da partida do motor e, à medida
que ele se acelera, os estágios vão sendo retirados. Ao final do processo de aceleração todos os estágios de resistência terão sido retirados e os anéis são, então, curto-circuitados. A operação de partir um motor por meio de um reostato é toda automática, feita por contatores eletromagnéticos comandados por relés de tempo e outros dispositivos de controle.
Os estágios de resistência são calculados em função dos valores de corrente de partida e de
conjugado máximo que se deseja limitar. Para a corrente de partida se limita o valor máximo que
ela pode atingir e para o conjugado, o mínimo valor. Para simplificar o cálculo dos estágios de resistência que irão compor o reostato de partida, a parte estável da característica do motor de indução
– região da curva entre o conjugado máximo e o conjugado zero – é considerada reta.
Fig. 2.16 – Reostato de partida de um motor de rotor bobinado
2.14) IDÉIAS PRELIMINARES SOBRE CONTROLE DE VELOCIDADE
Após ter sido ligado à rede de alimentação e atingir a sua velocidade de regime, o motor de
indução, em especial o de rotor em gaiola, é um motor de velocidade praticamente constante. Mesmo quando há variação da carga e, conseqüentemente, uma variação do escorregamento, sua velocidade varia muito pouco. Entretanto, em muitos acionamentos realizados pelos motores de indução
é exigido um controle de sua velocidade dentro de certos limites que pode ser alcançado por diversos modos, dependendo do grau de controle que se deseja.
Pode-se controlar a velocidade de um motor de indução usando os seguintes métodos:
a) Alterando o número de polos do enrolamento do estator. (Aplicado apenas aos motores
de rotor em gaiola que têm a propriedade de reproduzir automaticamente o número de
polos do estator).
b) Alterando a tensão aplicada ao estator. (Aplicado a ambos os tipos)
c) Alterando a resistência do circuito do rotor. (Aplicado apenas aos motores de rotor bobinado).
60
d) Alterando a freqüência da fonte que alimenta o motor. (Aplicado a ambos os tipos)
a) ALTERANDO O NÚMERO DE POLOS DO ESTATOR
A equação [1.02] mostra que a velocidade síncrona do campo girante do motor depende da
freqüência da rede e do número de polos do rotor, ou seja:
n1 =
f1120
P
[2.50]
A alteração do número de polos do estator não representa, na realidade, um controle de velocidade do motor, pois o que se consegue é apenas obter, num mesmo motor, duas ou no máximo
três velocidades diferentes.
O número de polos do motor pode ser alterado de duas maneiras. A primeira, dividindo cada
fase do enrolamento do estator em duas partes iguais. Os terminais de cada uma das partes são levados à caixa de ligação do motor de modo a permitir que sejam feitas conexões externas por meio de
contatores. Estas conexões são feitas de modo a mudar o sentido da corrente em uma das partes ao
se comutar o enrolamento de uma ligação em série para uma ligação em paralelo. Ao se fazer esta
comutação o número de polos será reduzido à metade e, portanto, a velocidade do motor dobra.
A figura [2.17] mostra, esquematicamente, como são feitas as conexões para dobrar ou reduzir o número de polos.
Fig. 2.17 – Diagrama esquemático para mudança de polos
Na figura 2.17 as letras (A1, X1) e (A2, X2) representam os terminais de uma bobina qualquer
(começo e fim da bobina) e a letra grega τ o passo polar. Os diagramas a e b da figura 2.17 mostram
conexões em série das bobinas para obter a mudança de polos. Se a conexão inicial é a da figura
61
2.17a, temos 4 polos (4 passos polares indicados pela letra τ). Fazendo a mudança das conexões
conforme a figura 2.17b (conexão série) ou 2.17c (conexão paralela), obtemos dois polos (dois passos polares τ).
A figura 2.18a mostra a conexão que deve ser feita para mudar um enrolamento de 2P polos
para P polos, cujas duas metades estão ligadas em estrela-série. A conexão passa de estrela-série
(2P polos) para estrela em paralelo (P polos). Na figura 2.18b, o enrolamento de 2P polos está ligado em triângulo-série e a conexão a ser feita que irá mudá-lo para estrela-paralelo.
Estas conexões são normalizadas. Nos diagramas da figura 2.18 a figura central mostra como deve ser feita a conexão e a figura da direita o resultado obtido. Obviamente, a conexão pode ser
feita no sentido de dobrar ou reduzir à metade o número de polos. O motor que permite estes tipos
de conexão é conhecido como motor tipo Dahlander.
A segunda maneira de se mudar o número de polos de um motor é construindo um estator de
forma que suas ranhuras comportem dois enrolamentos distintos, eletricamente isolados um do outro. Neste caso, o motor poderá operar, ora com um enrolamento, ora com outro e a relação entre as
velocidades não precisa ser igual a dois, como no caso precedente.
Fig.2.18 – Conexões de enrolamentos para dobrar o número de polos
b) ALTERANDO A TENSÃO APLICADA AO MOTOR
O conjugado eletromagnético desenvolvido pelo motor de indução é função do quadrado da
tensão aplicada em seus terminais, conforme mostram as equações [2.35] e [2.41]. Assim sendo, ao
variar a tensão aplicada aos terminais do motor, a sua curva característica se modifica proporcionalmente aos valores do quadrado da tensão, conforme mostra a figura 2.19 que supõe uma redução
de 50% da tensão.
62
Fig. 2.19 – Variação da velocidade com variação da tensão
A velocidade em que o motor opera é determinada pelo encontro da curva característica do
conjugado motor com a curva característica da máquina acionada. Quando a tensão aplicada é V1, o
V
ponto de encontro das duas curvas determina a velocidade n1. Quando a tensão é 1 , o ponto de
2
encontro das curvas dará a velocidade n2. A tensão variável a ser aplicada ao motor poderá ser obtida por meio de conversores estáticos. No caso de ventiladores domésticos que operam com 3 a 4
velocidades, a tensão variável é obtida por queda de tensão em resistores. Para os motores industriais, em geral, motores de grande porte, este método de controle não é muito usado por ser caro e
produzir perdas jóulicas significativas.
c) ALTERANDO A RESISTÊNCIA DO ROTOR
Na seção 2.13 ficou demonstrado que quando se altera a resistência de um rotor bobinado, o
escorregamento correspondente ao conjugado máximo se altera na mesma proporção, modificando
a configuração da curva de conjugado para cada valor de resistência. Assim, da mesma forma que
no caso anterior, a cada ponto de encontro da curva de conjugado da carga com as curvas do conjugado motor obtidas pela alteração da resistência rotórica, corresponderá uma velocidade de operação do motor, como mostra a figura 2.20.
Fig. 2.20 – Velocidades por meio de resistências do rotor
63
Diferentemente do reostato de partida em que as resistências são retiradas após o motor atingir sua velocidade de regime, no caso do controle feito por resistências, estas permanecem inseridas
no circuito do rotor enquanto se desejar o controle da velocidade. Por isto, as perdas jóulicas do
rotor aumentam, reduzindo o rendimento do motor o que torna este método pouco utilizado na pratica. Da mesma forma como foi observado para o cálculo do reostato de partida na seção 2.13, para
facilitar o cálculo das resistências a serem inseridas no circuito do rotor, a parte da curva característica do conjugado situada entre o conjugado máximo e o conjugado nulo é considerada reta.
d) ALTERANDO A FREQUÊNCIA DA TENSÃO APLICADA
O controle da velocidade de um motor de indução pela variação da freqüência da rede é
previsto a partir da equação [2.50]. É praticamente o único método de controle usado atualmente,
graças aos conversores de freqüência estáticos. Estes dispositivos eletrônicos permitem variar de
forma contínua a freqüência da fonte que alimenta o motor de forma a se obter uma ampla faixa de
controle da velocidade.5
Ao se variar a freqüência da fonte, é necessário fazer com que as características de conjugado do motor mantenham suas configurações ao longo de toda a faixa de controle da velocidade e
não permitir que ele perca sua capacidade de sobrecarga momentânea dada pelo valor do seu conjugado máximo. Isto se consegue fazendo o motor operar com seu fluxo magnético mantido constante
V
para todos os valores de freqüência. Para tanto, a relação 1 = const × φ , obtida a partir da equação
f1
[2.16] deve se manter constante. Isto significa que, ao se variar a freqüência, a tensão deve ser variada no mesmo sentido da variação da freqüência.
.
Fig. 2.21 - Características do conjugado de um motor de indução com freqüências diferentes
A figura 2.21 mostra um conjunto de curvas características de um motor de indução obtidas
a partir da variação da freqüência da rede, proporcionalmente à variação da tensão. Como se pode
perceber, à medida que a freqüência aumenta, o conjugado máximo se mantém praticamente inalterado. Somente nas freqüências mais baixas, devido ao aumento relativo da influência da queda de
5
Este assunto será estudado em detalhes na disciplina de Acionamentos Elétricos I
64
tensão na resistência do estator, o fluxo magnético sofre um significativo decréscimo. Como conseqüência, o conjugado máximo reduz o seu valor. Isto pode ser visualizado pela equação [2.37] ou
[2.45]. Nas freqüências mais altas, R1 se torna pequena comparada com as reatâncias e pode ser
desprezada. A equação [2.37] se transforma em:
Cmax
m1V12
m1V12
=
=
=
2
'
2
2ω1 (X 1 + X 2' ) 2ω1 (X 1 + X 2 ) const × f1
m1V12
[2.51]
Nas freqüências mais baixas, o valor relativo de R1 em relação às reatâncias já não pode ser
desprezado e valor do conjugado máximo se reduz. Para manter o conjugado máximo com valores
iguais em alta e baixa freqüência, a tensão deve ser reduzida em um grau menor do que a redução
da freqüência.
2.15) EXERCÍCIOS RESOLVIDOS
2.15.1) Um motor de indução trifásico, rotor em gaiola, 4 polos, 60 Hz, gira com um escorregamento igual a 0,03. Pede-se:
a)
b)
c)
d)
A velocidade do rotor em RPM.
A freqüência de escorregamento.
A velocidade do campo girante do rotor em relação à carcaça do estator.
A velocidade do campo girante do rotor em relação ao campo girante do estator.
SOLUÇÃO
a) n = n1 (1 − s ) = 1800(1 − 0,03) = 1746 RPM (R)
b) f 2 = sf 1 = 0,03 × 60 = 1,8 Hz (R)
f) A velocidade do campo girante do rotor é igual à velocidade mecânica do rotor mais o escorregamento absoluto. Chamando de n2 a velocidade co campo girante do rotor, tem-se:
n 2 = n + (n1 − n ) = n1 = 1800 RPM (R)
g) Não há velocidade relativa entre os campos magnéticos. Eles giram à mesma velocidade.
2.15.2) Um motor de indução trifásico, rotor bobinado, 220 V, 6 polos, 60 Hz, possui o seu
enrolamento do estator ligado em triângulo e o do rotor em estrela. O número de espiras em série
por fase do enrolamento do rotor é a metade do número de espiras em série por fase do enrolamento
do estator. Os fatores de bobinagem de ambos os enrolamentos são iguais. Pede-se:
a) O escorregamento a 1110 RPM.
b) A tensão induzida entre os anéis com o rotor travado. (Admitir que a tensão aplicada é
praticamente igual à tensão induzida no estator)
c) A tensão induzida por fase com o escorregamento calculado em a).
65
d) A freqüência do rotor.
SOLUÇÃO
a) s =
n1 − n 1200 − 1110
=
= 0,075 (R)
1200
n1
b) De acordo com a equação [2.08] tem-se:
N K
E1
E
= 1 b1 = K e ∴ E 2 = 1
E2 N 2 K b2
Ke
220
= 110 V. Este é o valor induzido por fase. Como o
2
enrolamento do rotor está ligado em estrela e os anéis ligados aos terminais do enrolamento, a tensão induzida entre os anéis será 110 3 = 190,52 V (R)
E1 ≅ V1 = 220 V; K e = 2 ∴ E 2 =
c) A tensão induzida por fase com o motor operando com o escorregamento calculado em a)
será igual a E 2 r = sE 2 = 0,075 ×110 = 8,25 V (R)
d) f 2 = sf 1 = 0,075 × 60 = 4,5 Hz (R)
2.15.3) Um motor de indução trifásico, rotor bobinado, 4 polos, 60Hz, possui um estator
ligado em estrela com 48 ranhuras e 10 condutores por ranhura. O passo das bobinas que compõem
o enrolamento é igual a 10 ranhuras. Pede-se:
a) O fator de bobinagem do enrolamento do estator.
b) O fluxo máximo por pólo quando ele for ligado a uma tensão de 220 V. (Considerar a
tensão induzida praticamente igual à tensão aplicada).
SOLUÇÃO:
nγ
2 e K = sen λ π . A letra n representa o número de
a) K b1 = K d 1 K p1 ; Sendo K d 1 =
p1
γ
2
n sen
2
48
ranhuras por pólo, por fase, isto é: n =
= 4 ; γ é o ângulo elétrico entre duas ranhuras contí4×3
4 × 15
sen
360 4
2 = 0,9576 ;
guas, ou seja: γ =
× = 15 0 ∴ K d 1 =
15
48 2
4 sen
2
λ é a relação entre o passo da bobina e o passo polar, ambos medidos em número de ranhuras, isto
10 π
10
é: λ = ∴ K p1 = sen × = 0,9659 . Portanto, K b1 = 0,9576 × 0,9659 = 0,9249 (R)
12 2
12
sen
c) De acordo com [2.05] temos:
66
220
E = 4,44 NfφK d K p = 4,44 NfφK b ∴φ =
E1
3
=
= 0,0064 Wb (R)
4,44 N 1 f 1 K b1 4,44 × 80 × 60 × 0,9249
Sendo N1 calculado como segue:
48
×10
3
N 1 = número de espiras em série por fase =
= 80 .
2
2.15.4) Supondo que o rotor do problema anterior possua o enrolamento ligado em estrela,
com 36 ranhuras, 6 condutores por ranhura e um passo de bobina igual a 9 ranhuras, determinar a
relação de transformação de tensões do motor.
SOLUÇÃO
A relação de tensões é dada por: K e =
N 1 K b1
×
. Os dados com relação ao rotor serão obtiN 2 K b2
dos como segue:
3 × 20
nγ
sen
2 =
2 = 0,9598 ; sendo n = 36 = 3 e γ = 360 × 4 = 20 o .
=
20
γ
4×3
36 2
3 sen
n sen
2
2
sen
Kd 2
36
×6
π 9 π
3
K p 2 = sen λ = × = 1 . O número de espiras em série por fase será: N 2 =
= 36 .
2
2 9 2
Substituindo os valores na expressão de Ke tem-se:
Ke =
80 0,9249
×
= 2,1414 (R)
36 0,9598
2.15.5) Determinar a tensão gerada em um único condutor do rotor do problema anterior
quando ele gira a 1740 RPM.
SOLUÇÃO
A tensão gerada por fase com o rotor operando será igual a:
220
1800 − 1740
3
E 2 r = sE 2 =
×
= 1,9772 V. Esta tensão é obtida nos terminais das 36 es2,1414
1800
1,9772
piras por fase. Portanto, em cada condutor será induzida a tensão de E 2c =
= 0,0275 V (R)
36 × 2
67
2.15.6) Um motor de indução trifásico, rotor em gaiola, 440 V, 60 Hz, 6 polos, possui o enrolamento do estator ligado em estrela. O número de espiras por fase é igual a 180, sendo 0,93 o seu
fator de bobinagem. O número de ranhuras do rotor é 48. Pede-se:
a) A tensão por fase induzida no rotor quando ele estiver travado.
b) Idem, quando ele estiver girando a 1180.
c) A freqüência de escorregamento no caso do item b).
SOLUÇÃO
a) O número de fases e o número de “espiras” para um rotor do tipo gaiola são conceitos que
K
N
foram definidos na seção 2.6. A tensão induzida por fase será: E 2 = E1 2 × b 2 . Os valores das
N 1 K b1
p 3
grandezas são os seguintes: N 1 = 180; N 2 = = = 1,5 . O número de fases do rotor será igual a
2 2
Q 2 48
=
= 16 . Substituindo os valores obtidos tem-se:
p
3
E2 =
440
3
×
1,5
1
×
= 2,2763 V (R)
180 0,93
b) E 2 r = sE 2 =
c) f 2 = sf 1 =
1200 − 1180
× 2,2763 = 0,0379 V. (R)
1200
20
× 60 = 1 Hz (R)
1200
2.15.7) Um motor de indução trifásico, rotor bobinado, 4 polos, 60 Hz, funciona na sua condição nominal com um escorregamento igual a 0,05. A potência eletromagnética é igual a 120 kW.
As seguintes perdas foram determinadas:
∆Pj1 = 3 kW; ∆Pfe = 1,7 kW; ∆Pmec = 2 kW
Pede-se:
a) Calcular a perda jóulica do rotor.
b) A potência útil ou de saída.
c) O rendimento do motor.
SOLUÇÃO
a) De acordo com a equação [2.29] as perdas jóulicas do rotor são iguais a:
∆Pj 2 = sPem = 0,05 ×120 = 6 kW (R)
b) A potência útil é igual à potência mecânica interna menos as perdas mecânicas, ou seja:
68
P = Pmi − ∆Pmec = (1 − s )Pem − ∆Pmec = (1 − 0,05)120 − 2 = 112 kW (R)
c) η =
112
P
P
P
=
=
=
= 89,8% (R)
P1 P + ∆P P + (∆Pj1 + ∆Pfe + ∆Pj 2 + ∆Pmec ) 112 + (3 + 1,7 + 6 + 2 )
P1 é a potência de entrada e poderia ser também calculada como sendo igual à potência eletromagnética mais as perdas do estator, ou seja:
P1 = Pem + (∆Pj1 + ∆Pfe ) = 120 + (3 + 1,7 ) = 124,7
2.15.8) Uma máquina de indução trifásica, 6 polos, 60 Hz, funciona como gerador. O órgão
primário acionador acoplado diretamente ao eixo do rotor desenvolve um conjugado igual a 402
Nm a uma velocidade de 1260 RPM. As perdas jóulicas do estator são iguais a 1,4 kW, as perdas
magnéticas 1,6 kW e as perdas mecânicas, 1 kW. Calcular o rendimento do gerador.
SOLUÇÃO
Tratando-se de um gerador o fluxo de potência se inverte em relação ao motor, isto é, a potência mecânica entra pelo eixo do rotor e sai potência elétrica pelos terminais do enrolamento do
Cn
402 ×1260
=
= 53,04 kW. O esestator. A potência que o rotor recebe no eixo é igual a: P =
9550
9550
corregamento é negativo pois a velocidade do rotor é maior do que a do campo girante do estator. O
1200 − 1260
= −0,05
escorregamento será: s =
1200
P
P
53,04
=
=
= 49,56 kW.
A potência eletromagnética será igual a: Pem =
1 − (− s ) 1 + s 1 + 0,05
A potência de saída será igual à potência eletromagnética menos as perdas no estator, ou
seja:
P 46,56
P1 = Pem − (∆Pj1 + ∆Pfe ) = 49,56 − (1,4 + 1,6) = 46,56 kW ∴η = 1 =
= 87,78 % (R)
P 53,04
2.15.9) Um motor de indução trifásico, rotor em gaiola, desenvolve a sua potência nominal com um
escorregamento igual a 8,5%. O seu conjugado máximo, igual a 2,5 p.u. do conjugado nominal, se
dá para um escorregamento de 50%. Desprezando-se as perdas magnéticas e mecânicas (perdas
rotacionais a vazio), pede-se:
a) Determinar o conjugado de partida, em p.u.
b) Determinar a corrente de partida do rotor em p.u.
SOLUÇÃO
a) Este problema será resolvido por meio das equações normalizadas [2.46] e [2.47]. Substituindo Cmax e smax pelos valores dados e fazendo s= sn= 0,085 em [2.47], obtém-se o seguinte valor
para o parâmetro Q:
69
C mi
=
C max
1+ Q 2 +1
1
∴
=
∴ Q = 3,021
Q2 +1 s
Q 2 + 1 0,085 0,50
s max 2,5
1+
+
+
1+
2
s
2
0,50 0,085
s max
1+ Q2 +1
Voltando à mesma equação e agora com o valor de Q conhecido, faz-se s = 1, para cujo valor corresponde o conjugado de partida Cp, ou seja:
Cp
2,5
=
1 + 3,0212 + 1
3,0212 + 1 1
0,50
+
1+
2
1
0,50
∴ C p = 2,1 p.u. (R)
b) A corrente de partida será obtida pelo mesmo processo usando a equação [2.47]
(
)
)
(
2
2
1+ Q2 +1 + Q2
1 + 3,0212 + 1 + 3,0212
I 2'
1
=
∴
=
∴ I 2' m = 3,8667 p.u.
'
2
'
2
I 2m
I 2m
0,50
sm
3,0212 + 1 + 3,0212
Q2 +1 + Q2
1 +
1 +
s
0.085
'
Voltando à mesma equação e substituindo agora o valor de I 2m
e fazendo s = 1, tem-se o
valor de I 2' p = 5 p.u. (R).
2.15.10) A resistência medida entre os anéis deslizantes do rotor de um motor de indução
trifásico, 60 Hz, 16 polos, 224 kW é igual a 0,035 ohms. Com os anéis curto-circuitados o escorregamento a plena carga é 0,025. O motor aciona um soprador de ar que requer uma potência de 224
kW à velocidade nominal do motor. O conjugado requerido pelo soprador varia com o quadrado da
velocidade. Supondo que a região estável da característica de conjugado do motor (região entre o
conjugado máximo e o conjugado zero) seja reta, conforme mostra a fig 2.22, que valor de resistência por fase deve ser adicionada em série com os anéis do rotor de modo que o motor gire a 300
RPM?
C (p.u.)
1,00
0,467
B
A
M
70
1
0,713
0,333
0,025
0
S
Fig. 2.22 – Variação do conjugado motor com a resistência do rotor (características retas)
SOLUÇÃO
A velocidade do motor a plena carga será: n = n1 (1 − s ) = 450(1 − 0,025) = 439 RPM. O conjugado que o soprador de ar vai requerer a esta velocidade é igual ao conjugado nominal de plena
224
carga tomado como conjugado base. Seu valor é igual a Cn = 9550
= 4872,89 Nm. e poderá ser
439
considerado igual a 1 p.u.
Na velocidade de 300 RPM, o conjugado que o soprador vai requerer será igual a
2
2
300
300
C300 = C439
= 1
= 0,467 p.u. = 2275,64 Nm. O escorregamento correspondente à
439
439
450 − 300
= 0,333 .
velocidade de 300 RPM será: s300 =
450
A reta OA constitui a característica do motor na condição nominal de operação e a reta OM
a característica para a condição nominal com a velocidade de 300 RPM. A reta OM encontra a reta
de conjugado igual a 1 p.u. no ponto A ao qual corresponde o escorregamento de 0,713 obtido por
semelhança de triângulos. Portanto, para o mesmo valor de carga no eixo, o escorregamento aumen0,713
tou de 0,025 para 0,713, ou seja,
= 28,52 vezes. Chamando de Rx a resistência a ser acrescen0,025
tada em série com o rotor, a resistência do rotor deverá aumentar na mesma proporção:
R2' = R2 + Rx = 28,52
0,035
0,035 0,035
∴ Rx = 28,52
−
= 0,482 ohms/fase. (R)
2
2
2
2.16) PROBLEMAS PROPOSTOS
2.16.01) Um motor de indução trifásico, rotor bobinado, 6 polos, 60Hz, com o enrolamento
do estator ligado em estrela, possui 54 ranhuras, 12 condutores por ranhura e passo de bobina igual
a 7 ranhuras. Pede-se:
a) Calcular o fluxo magnético por pólo quando o motor for ligado a uma tensão de 230V.
Desprezar a impedância do enrolamento do estator
b) Tendo o rotor 4 ranhuras/pólo/fase com 4 condutores em série por ranhura e sendo o enrolamento do rotor de passo pleno, determinar a relação de transformação das tensões.
c) Determinar a tensão induzida em um único condutor do rotor quando este gira a 1160
RPM. Desprezar a impedância do enrolamento.
2.16.02) O estator de um motor de indução trifásico com rotor bobinado, 6 polos está ligado
a um barramento de freqüência 60 Hz e o rotor a um outro barramento de 25 Hz. Pede-se:
a) Haverá conjugado de partida?
b) A que velocidade ocorreria o funcionamento estável como motor?
71
c) Haveria outra possibilidade de operação estável? Como e em que velocidade?
2.16.03) A figura 2.23 representa uma máquina de indução trifásica com rotor bobinado cujo
eixo está rigidamente acoplado ao eixo de um motor síncrono trifásico. O enrolamento do rotor da
máquina de indução está ligado a três anéis coletores como indica a figura. A máquina de indução é
acionada pelo motor síncrono a uma determinada velocidade de modo a se obter nos anéis coletores
tensões trifásicas de 120 Hz. O enrolamento do estator da máquina de indução é para 6 polos. Pedese:
a) Quantos polos precisa ter o enrolamento do rotor da máquina de indução?
b) Se o campo magnético do estator da máquina de indução gira em sentido horário, qual
será o sentido de rotação do rotor?
c) Qual é a velocidade em RPM?
d) Quantos polos deve ter o motor síncrono?
2.16.04) A mesma figura do problema anterior representa, agora, um sistema para converter
tensões trifásicas equilibradas na freqüência de 60 Hz para outras freqüências. O motor síncrono
tem dois polos e aciona a máquina de indução no sentido horário. A máquina de indução possui 12
polos e o enrolamento do estator está ligado à rede para produzir um campo magnético no sentido
anti-horário. A máquina de indução possui o rotor bobinado cujos terminais são ligados aos anéis
coletores deslizantes. Pede-se:
a) A que velocidade deve girar o motor?
b) Qual a freqüência de escorregamento da máquina de indução?
Fig. 2.23 – Conjunto motor síncrono-máquina de indução
2.16.05) Um motor de indução trifásico, rotor em gaiola, de 75 kW, 440 V, 60 Hz, 8 polos,
enrolamento do estator ligado em estrela, possui as seguintes constantes do circuito equivalente em
valores por fase, referidos ao estator:
R1 = 0,085Ω; R2' = 0,067Ω; X 1 = 0,196Ω; X 2' = 0,161Ω; X m = 6,65Ω
72
As perdas mecânicas valem 3,2kW e as perdas magnéticas são desprezíveis. Usando o circuito equivalente completo, pede-se:
a) Calcular a potência de saída, a corrente do estator, o fator de potência e o rendimento do
motor para um escorregamento igual a 3%, à tensão e freqüência nominais.
b) Calcular a corrente de partida e o conjugado de partida, em Nm.
2.16.06) Um motor de indução trifásico, rotor em gaiola, 7,5 kW, 60 Hz, 6 polos, opera a
plena carga com um escorregamento igual a 3%. As perdas mecânicas representam 4% da potência
de saída. Pede-se:
a) Calcular as perdas jóulicas do rotor a plena carga.
b) O conjugado eletromagnético a plena carga.
c) A potência eletromagnética.
2.16.07) Um motor de indução trifásico, rotor em gaiola, de 7,5 kW, 230 V, 60 Hz, 4 polos,
estator ligado em estrela, desenvolve o conjugado nominal com um escorregamento de 4%. As perdas rotacionais a vazio podem ser desprezadas. As constantes do circuito equivalente referidas ao
estator são:
X 1 = X 2' = 0,47Ω; R1 = R2' = 0,36Ω; X m = 15,5Ω
Pede-se, usando o modelo completo de circuito equivalente:
a) Determinar o conjugado máximo, em Nm e em p.u.
b) O conjugado de partida., em Nm e em p.u.
c) O escorregamento correspondente ao conjugado máximo.
2.16.08) O motor do problema anterior é ligado a um barramento de 230 V, 60 Hz, por meio
de uma impedância igual a Z = 0,5 + j 0,3 ohms por fase. Determinar o conjugado eletromagnético
máximo que o motor pode manter e os valores correspondentes de corrente e tensão de Thévénin.
2.16.09) Um motor de indução trifásico tem um conjugado de partida igual a 1,6 p.u. e um
conjugado máximo igual a 2,0 p.u. (o conjugado nominal é tomado como base). Desprezando-se a
resistência do estator e as perdas rotacionais a vazio do rotor, e supondo a resistência do rotor constante, pede-se, usando-se as equações normalizadas de Thévénin:
a) O escorregamento nominal.
b) O escorregamento crítico.
c) A corrente do rotor na partida, em p.u., tomando a corrente nominal do rotor como base.
2.16.10) Para um motor de indução trifásico, rotor em gaiola, de 18,5 kW, 60 Hz, 230 V,
operando a plena carga, a perda jóulica do rotor correspondente ao conjugado máximo é 9 vezes a
perda jóulica correspondente ao conjugado nominal. As perdas rotacionais a vazio podem ser desprezadas. Sendo 3% o escorregamento nominal, pede-se:
73
a) O escorregamento crítico.
b) O conjugado máximo em p.u..
c) O conjugado de partida em p,u,
2.16.11) Um motor de indução trifásico, rotor em gaiola, opera a plena carga com um escorregamento igual a 5%. A corrente do rotor na partida é igual a 5 p.u. Todas as perdas podem ser
desprezadas. Pede-se, usando as equações normalizadas:
a) Calcular o conjugado de partida em p,u,
b) Calcular o conjugado máximo em p.u. e o correspondente escorregamento smax.
2.16.12) Um motor de indução trifásico, rotor bobinado, de 37 kW, 440 V, 4 polos, 60 Hz,
desenvolve um conjugado máximo igual a 2,5 p.u. a um escorregamento de 16%, estando os anéis
do rotor curto-circuitados. A resistência do estator e as perdas rotacionais a vazio podem ser desprezadas. Pede-se:
a) O escorregamento nominal.
b) As perdas jóulicas do rotor a plena carga.
c) O conjugado de partida, em Nm.
Se a resistência do rotor for dobrada pela inserção de resistências externas, determinar:
d) O conjugado nominal em Nm.
e) O escorregamento nominal correspondente.
2.16.13) Um motor de indução trifásico, rotor bobinado, 37 kW, 440 V, 60 Hz, 4 polos,
1745 RPM tem o conjugado máximo igual a 2,0 p.u. A resistência ôhmica do rotor é 0,10 ohms por
fase. As perdas rotacionais a vazio podem ser desprezadas. Pede-se:
a) A perda jóulica do rotor a plena carga.
b) A velocidade do motor correspondente ao conjugado máximo.
c) Que valor de resistência deve ser inserido no rotor para que o conjugado máximo se dê
na partida?
O motor é agora ligado a um barramento de 50 Hz com uma tensão tal que a onda de fluxo
do entreferro tem a mesma amplitude com o mesmo conjugado que em 60 Hz. Pede-se:
d) Calcular a tensão aplicada a 50 Hz.
e) A velocidade para a qual o conjugado a 50 Hz seja igual ao de 60 Hz, a plena carga.
2.16.14) Um motor de indução trifásico, rotor bobinado, 220 V, 4 polos, 60 Hz, desenvolve
um conjugado interno de 1,50 p.u. com uma corrente de linha igual a 1,80 p.u. a um escorregamento
de 5%, estando os terminais do rotor curto-circuitados. O enrolamento do rotor está ligado em estrela e a sua resistência ôhmica por fase vale 0,05 ohms. Pede-se:
a) Qual deve ser o valor da resistência a ser introduzida no circuito do rotor de modo a limitar a corrente de partida a 1,60 p.u.?
b) Qual o conjugado de partida?
74
2.16.15) Um motor de indução trifásico, rotor em gaiola, 220 V, 4 polos, 60 Hz, desenvolve
um conjugado interno máximo igual a 2,50 p.u. com um escorregamento de 16%. Desprezando-se a
resistência do estator, pede-se:
a) Determinar o conjugado interno máximo que o motor desenvolveria se fosse ligado a um
barramento de 200V e 50 Hz.
b) A velocidade correspondente ao conjugado máximo desenvolvido.
2.16.16) Utilizando o circuito equivalente do rotor, demonstre que o conjugado máximo de
um motor de indução se dará na partida quando a resistência do rotor (considerada como variável)
for igual à sua reatância.
2.16.17) Um motor de indução trifásico, rotor em gaiola, de 400 V, 60Hz, 4 polos, estator ligado em estrela, gira a 1750 RPM. As constantes do circuito equivalente têm os seguintes valores:
R1 = 2 R2' = 0,20Ω; X 1 = 0,50Ω; X 2' = 0,20Ω; X m = 20Ω
Sendo as perdas rotacionais a vazio iguais a 800 W, pede-se calcular as seguintes grandezas,
usando o modelo de circuito equivalente completo:
a)
b)
c)
d)
e)
A corrente do estator.
A potência de entrada.
A potência útil.
O conjugado útil.
O rendimento.
2.16.18) Com os dados do problema anterior, calcular as mesmas grandezas usando o circuito equivalente segundo Thévénin.
2.16.19) Um motor de indução trifásico, rotor bobinado, 220 V, 60 Hz, 4 polos, desenvolve
um conjugado máximo de 2,25 p.u. com um escorregamento de 15%. A resistência do rotor é igual
a 0,03 ohms/fase (valor real não referido ao estator). A resistência do estator e as perdas rotacionais
a vazio podem ser desprezadas. Pede-se:
a) Qual o valor de resistência deve ser inserida no circuito do rotor de modo que o conjugado máximo se dê na partida?
b) Qual o escorregamento a plena carga? (sem a resistência inserida)
c) Qual o escorregamento e o conjugado, quando a corrente do motor é a nominal, com
uma resistência de 0,07 ohms inserida no circuito do rotor?
d) Qual o máximo valor do conjugado, em p.u., se o motor fosse ligado a uma fonte de 220
V, 50 Hz?
2.16.20) Um motor de indução trifásico, rotor em gaiola, estator ligado em estrela, 4 polos,
60 Hz, possui uma resistência do estator igual a 5 ohms à temperatura de operação. Quando a corrente do estator for 10 A e a potência de entrada for 3000 W, qual será o conjugado eletromagnético
em Nm? Desprezar as perdas magnéticas do estator.
75
2.16.21) Um motor de indução trifásico, rotor em gaiola, 37 kW, 220 V, 4 polos, 60 Hz, 4
polos, possui uma corrente de partida igual a 2,0 p.u. O seu conjugado de partida é igual a 0,16 p.u.
quando se aplica uma tensão de 30% da nominal no motor. Deseja-se ligar este motor à rede por
meio de uma chave compensadora de partida com a finalidade de reduzir a corrente de partida. Pede-se determinar o conjugado de partida, em p.u., de modo que a corrente de partida na rede seja
reduzida de a 1,50 p.u.
2.16.22) Um gerador de indução trifásico de 4 polos, 60 Hz é acionado por uma turbina a
vapor que fornece no eixo do rotor uma potência igual a 125 kW. A freqüência de escorregamento
vale 3 Hz. Os ensaios a que o gerador foi submetido forneceram os seguintes resultados:
• Perdas mecânicas: 3 kW
• Perdas magnéticas do estator: 1,5 kW
• Perdas jóulicas do estator: 3,5 kW
Pede-se:
a)
b)
c)
d)
e)
f)
A velocidade do rotor, em RPM.
A potência mecânica interna, em kW.
As perdas jóulicas do rotor, em kW.
A potência eletromagnética transferida do rotor para o estator, em kW.
A potência útil, disponível nos terminais do estator, em kW.
O rendimento do gerador.
RESPOSTAS DOS PROBLEMAS
2.16.01) a: 0.00512 Wb; b: Ke – 2,12; c: 0,0228 V
2.16.02) b: 700 RPM; c: 1200 RPM
2.16.03) a: 6 polos; b:anti-horário; c:1200 RPM; d:6 polos
2.16.04) 3600 RPM; b:420 Hz
2.16.05) a: P = 59,56 kW; I1 = 113,67 A; cosφ = 0,894; η = 89%;
b: Ip = 664 A; Cp = 940 Nm
2.16.06) a:241 W; b: 64 Nm; c: 8033 W
2.16.07) a: 99 Nm; b: 49 Nm; c: 0,222
2.16.08) Cm = 61,73Nm; I1 = 53,2 A; VTh= 186 V
2.16.09) a: 0,134; b: 0,50; c: 3,45 p.u.
2.16.10) a: 0,1237; b: 2,18 p.u.; c: 0,531 p.u.
2.16.11) a: Cp = 1,25 p.u.; b: Cm = 2,63 p.u.; sm = 0,253
2.16.12) a: 0,0334; b: 1278 W; c: 203 Nm; d: 210 Nm; e: 0,0668
2.16.13) a: 1144 W; b: 1598 RPM; c: 0,793 ohms; d: 367 V; e: 1446 RPM
2.16.14) a: 0,95 ohms; b: 1,80 p.u.;
2.16.15) Cm = 2,97 p.u.; n = 1212 RPM
2.16.16) a: 0,95 ohms; b: 1,80 p.u.
2.16.17) a: 54,62 A; b:35,56 kW; c: 32,13 kW; d: 174,8 Nm; e: 90%
2.16.18) VTh = 396 V; Z Th = 0,193 + j 0,497 ; Ip = 302,4 A; Cp = 145,54 Nm
2.16.19) a: 0,17 ohms; b = 1/’15; c: 1 p.u.; d: 3 p.u.
76
2,16.20) 15,12 Nm
2.16.21) 1 p.u.
2.16.22) a: 1890 RPM; b: 128 kW; c: 6,09 kW; d: 121,9 kW; e: 116,9 kW; f: 91,3%
2.17) QUESTIONÁRIO
2.17.01) O que é escorregamento de um motor de indução?
2.17.02) Porque não é possível a um motor de indução girar à velocidade síncrona?
2.17.03) Quais as vantagens do rotor em gaiola sobre o rotor bobinado? E as desvantagens?
2.17.04) Explique, por meio de desenhos, como o rotor em gaiola consegue reproduzir o
mesmo número de polos do estator.
2.17.05) Explique como um motor de indução pode operar como um gerador.
2.17.06) O que é freqüência de escorregamento? Porque, na partida, o seu valor é igual a 1?
2.17.07) Explique porque o rotor de um motor de indução gira no mesmo sentido de rotação
do campo girante do estator.
2.17.08) Demonstre que, apesar de o rotor girar a uma velocidade menor do que a do campo
girante do estator, o campo girante induzido no rotor gira à mesma velocidade síncrona, isto é, os campos girantes do estator e do rotor são estacionários, um em relação ao outro.
2.17.09) Em que situação é possível considerar o fluxo do motor de indução independente
da corrente de carga?
2.17.10) Demonstre que para um motor de indução de rotor em gaiola, o número de fases do
rotor é igual ao número de barras por par de polos.
2.17.11) Demonstre que para um motor de indução de rotor em gaiola, o número de espiras
do rotor é igual a ½ para um motor de 2 polos e o fator de bobinagem é igual a 1.
2.17.12) Demonstre que o seno do ângulo de carga de um motor de indução é igual ao fator
de potência do rotor.
2.17.13) Porque as grandezas do rotor devem ser referidas ao estator?
2.17.14) Desenhe o circuito equivalente completo de um motor de indução e demonstre que
ele atende à equação V&1 = (− E& 1 ) + I&1 (r1 + jx1 ) .
2.17.15) Demonstre, a partir do circuito equivalente do motor de indução, que a corrente atinge o máximo valor no momento da partida.
2.17.16) Porque é possível eliminar no circuito equivalente do motor de indução a resistência equivalente às perdas magnéticas do estator?
2.17.17) Demonstre que ao se inverter a rotação do motor pela troca de dois fios na entrada
do estator o escorregamento inicial é igual a 200%.
2.17.18) O que é região de frenagem da característica de um motor de indução e porque ela
recebe este nome.
2.17.19) Explique por que um motor de indução pode ser considerado um motor de velocidade constante.
2.17.20) Demonstre que o escorregamento nominal de um motor de indução é diretamente
proporcional à resistência do rotor.
2.17.21) O que acontece com as grandezas de um motor de indução de rotor bobinado, abaixo indicadas, quando se introduzem resistências no circuito do rotor: a) escorregamento nominal; b) conjugado de partida; c) conjugado máximo.
77
2.17.22) Quais as vantagens que um reostato de partida proporciona ao motor de rotor bobinado durante o processo de partida e aceleração?
2.17.23) Explique como se controla a velocidade do motor de rotor bobinado pela introdução de resistências no circuito do rotor e qual o inconveniente desta solução.
2.17.24) Qual o cuidado que se deve ter ao fazer o controle de velocidade de um motor de
indução pela variação da freqüência?
2.17.25) Porque o motor de indução monofásico não possui conjugado de partida?
2.17.26) Porque, após o motor monofásico ter sido ligado, com o auxílio de uma força externa aplicada ao rotor, ele pode girar para a esquerda ou direita?
2.17.27) Porque o motor monofásico, comparado com o motor trifásico, possui um menor
rendimento?
2.17.28) O que é enrolamento auxiliar de um motor monofásico? Qual o papel do capacitor
que faz parte do circuito?
2.18) MOTORES DE INDUÇÃO MONOFÁSICOS
A) CONCEITOS FUNDAMENTAIS
A possibilidade de se obter um campo magnético girante com facilidade é uma das principais vantagens da corrente trifásica em relação à monofásica. Todavia, motores de indução monofásicos são fabricados apesar de, tecnicamente, serem inferiores aos motores trifásicos. Eles são utilizados principalmente no acionamento de pequenas cargas tais como ventiladores domésticos, geladeiras, pequenas bombas dágua, etc.
O estator do motor monofásico é construído para receber dois enrolamentos: um, chamado
enrolamento principal, e um outro, chamado enrolamento auxiliar, que é essencial para se dar a
partida do motor, como se verá mais abaixo. O rotor é sempre em gaiola. O campo magnético criado pelo enrolamento principal ao ser percorrido por uma corrente alternada senoidal é um campo
pulsativo cujo eixo magnético é fixo no espaço, mas cujo sentido varia de acordo com a corrente. O
fluxo deste campo induz tensões e correntes nas barras do rotor, da mesma forma que o fluxo magnetizante criado pelo enrolamento primário de um transformador induz tensões e correntes no enrolamento secundário.
Fig. 2.24 –Esquema simplificado de um motor de indução monofásico
A figura 2.24 mostra o esquema simplificado de um motor de indução monofásico. Não está
indicado o enrolamento auxiliar mas apenas as duas metades do enrolamento principal. A corrente
78
alternada que alimenta o enrolamento do estator cria uma FMM pulsativa cujo eixo é fixo no espaço, variando sua polaridade, no tempo, de acordo com a freqüência da corrente. Nas barras do rotor
as correntes induzidas têm um sentido tal que produzem uma FMM contrária à FMM do estator. O
eixo da FMM do rotor coincide com o eixo da FMM do estator sendo, portanto, o ângulo de carga
igual a zero. Não há, como conseqüência, conjugado que possa atuar sobre o rotor e fazê-lo partir.
Nesta condição, o motor é simplesmente um transformador estático com o secundário (rotor) curtocircuitado.
Esta ausência de conjugado de partida no motor monofásico pode também ser explicada da
seguinte maneira: as correntes induzidas no rotor criam campos magnéticos ao redor dos condutores
que interagem com o campo pulsativo do rotor dando origem a forças que atuam sobre esses condutores. No caso da figura 1, considerando o eixo magnético da FMM do estator como uma vertical,
as correntes induzidas nos condutores do rotor à esquerda da vertical terão o sentido contrário ao
das correntes induzidas nos condutores da direita. Portanto, as forças que atuam sobre eles são iguais e de sentidos opostos sendo sua resultante nula. A ausência de um conjugado de partida é uma
característica dos motores de indução monofásicos. Quando ligado diretamente à rede, o motor não
parte, a menos que lhe seja dado um impulso inicial por uma força externa que o fará girar no sentido da força aplicada.
Além das explicações acima, a ausência de conjugado de partida no motor monofásico pode
ser entendida à luz da teoria dos dois campos magnéticos girantes presentes na operação do motor
monofásico de indução. Essa teoria é extremamente útil para explicar não só a ausência do conjugado de partida como também servir de base para a elaborar o circuito equivalente do motor.
Por esta teoria, a FMM pulsativa criada no estator pela corrente alternada i = I m sen ωt é
composta de duas FMMs, iguais em módulo, que giram, no espaço, em sincronismo com a freqüência da rede, porém em sentidos opostos.
Como foi visto ao se estudar o campo girante do motor de indução trifásico, a expressão da
FMM de um campo magnético pulsativo, criado por uma corrente alternada senoidal, é dada por:
F1 = F1 max cos ωt cosθ
[2.52]
F1max representa o máximo valor da FMM e θ o ângulo elétrico espacial medido a partir do
eixo magnético da bobina do estator. De acordo com conhecida relação trigonométrica, a equação
[2.53] é igual a:
F
F
F1 = 1 max cos(θ − ωt ) + 1 max cos(θ + ωt )
[2.53]
2
2
As parcelas do segundo membro da equação [2.53] são as expressões das FMMs de dois
campos magnéticos girantes cujas amplitudes são iguais à metade da amplitude da FMM do campo
magnético pulsativo e cujos sentidos de rotação são opostos. A figura 2.25 mostra a soma fasorial,
em quatro instantes diferentes, dos fluxos dos dois campos girantes que formam o fluxo pulsativo.
Cada um dos fluxos φI e φII é a metade do fluxo pulsativo φ.
Esta soma é verdadeira somente para o rotor parado. Com o rotor parado, ambos os fluxos
girantes induzirão nas barras correntes iguais, porém de sentidos contrários que, interagindo com o
campo pulsativo, vão produzir conjugados iguais de sentidos opostos que não permitem o rotor partir. Se uma força externa atua no seu eixo, no sentido horário ou anti-horário, o rotor continuará a
girar no sentido da força aplicada, por si mesmo, até atingir uma velocidade próxima do sincronis-
79
mo. Este fluxo que gira no mesmo sentido do rotor é chamado fluxo girante direto e o outro que
gira no sentido oposto, fluxo girante reverso
Fig. 2.25 – Fluxos girantes opostos cuja soma é igual ao fluxo pulsativo
À medida que o rotor gira, o fluxo reverso será fortemente desmagnetizado e o fluxo resultante será praticamente o fluxo girante direto, para velocidades próximas do sincronismo. A desmagnetização do fluxo reverso é explicada da seguinte maneira: o escorregamento do rotor, girando
à velocidade n no mesmo sentido do fluxo direto, com relação à velocidade síncrona n1 do fluxo
reverso, é igual a:
− n1 − n n1 + n n1 + n1 (1 − s )
s' =
=
=
= 2−s
[2.54]
− n1
n1
n1
Portanto, a freqüência de escorregamento produzida pelo fluxo reverso é muito maior do que
a produzida pelo fluxo direto. Por exemplo, para uma freqüência da rede de 60 Hz e um escorregamento de 0,05 produzido pelo fluxo direto, a freqüência de escorregamento relativa ao fluxo direto
seria 0,05x60 = 3 Hz, enquanto a relativa ao fluxo reverso seria (2-0,05)60 = 117 Hz, ou seja, 39
vezes maior do que a do fluxo direto. A essa freqüência a reatância do rotor é muito maior do que a
sua resistência e, como conseqüência, as correntes devidas a este campo serão praticamente reativas, exercendo um forte efeito desmagnetizante no fluxo reverso. Assim, para pequenos valores de
escorregamento, o conjugado de um motor de indução monofásico é produzido, praticamente, pelo
fluxo direto. Existe ainda um pequeno fluxo reverso que produz um efeito frenante, pois o conjugado que ele produz se opõe ao conjugado produzido pelo fluxo direto.6
A figura 2.26 mostra em linhas tracejadas as curvas características dos conjugados produzidos pelos fluxos direto e reverso (para frente e para traz, na figura) e em linha contínua a característica resultante.
Como se pode observar, à velocidade síncrona (n=n1), diferentemente do que ocorre no motor trifásico, há um conjugado frenante devido ao conjugado reverso atuando no rotor do motor monofásico.
A corrente que circula no rotor é formada pela superposição de duas correntes de freqüências muito diferentes. A perda jóulica do rotor é a soma das correntes induzidas pelos dois campos
separadamente. Por esta razão, a perda jóulica no rotor de um motor monofásico é bem maior do
6
Podemos ficar em dúvida se a teoria dos dois campos girantes reproduz realmente um fenômeno físico que está ocorrendo no motor monofásico ou se é apenas uma elaboração matemática. Por exemplo, será que há duas correntes de
freqüências diferentes no rotor? A verdade é que a matemática não falha. Existem, realmente, duas correntes de freqüências diferentes no rotor e isto pode ser provado por ensaios.
80
que a que ocorre num motor trifásico, o que o torna um motor de menor rendimento do que o trifásico correspondente
Fig. 2.26 – Curvas de conjugados direto, reverso e o resultante
Um aumento no escorregamento de um motor monofásico, além de aumentar a corrente I1 aumenta o conjugado frenante do campo inverso. Por esta razão, a operação de um motor
monofásico é menos estável e o seu conjugado máximo é menor do que o correspondente de um
motor trifásico.
A partida de um motor monofásico é feita com a ajuda de um enrolamento auxiliar. O papel
desse enrolamento auxiliar é criar um fluxo que esteja defasado no espaço e no tempo do fluxo
principal e, assim, obter na partida um fluxo girante resultante. Para isto o enrolamento auxiliar é
montado nas ranhuras do estator de forma tal a criar um fluxo magnético defasado aproximadamente 90o elétricos, no espaço, do fluxo principal. Porém, para criar o fluxo girante resultante não basta
esse fluxo estar defasado 90o elétricos no espaço. É necessário que ele seja percorrido por uma corrente que esteja o máximo possível defasada 90o elétricos, no tempo, da corrente que circula pelo
enrolamento principal. O campo resultante produz um conjugado de pequeno valor, mas suficiente
para partir o motor no sentido direto. À medida que o motor acelera, o conjugado devido ao campo
direto aumenta e o devido ao campo reverso diminui. O motor atinge, dessa forma, a sua velocidade
normal. O enrolamento auxiliar é desligado automaticamente pouco antes do motor atingir sua velocidade normal, pois não é necessária mais a sua atuação. Por isto, ele é projetado para ficar ligado
apenas durante o tempo que o motor gasta para acelerar.
Para se obter um defasamento o mais próximo possível de 90º elétricos, usa-se um capacitor
C em série com o enrolamento auxiliar, conforme mostra a figura 2.27a. O circuito mostra ainda
uma chave automática que, quando o motor está parado, ela está fechada e quando o motor atinge
uma determinada velocidade, próxima da velocidade nominal do motor, ela é desligada e permanece neste estado enquanto o motor estiver operando.
81
Fig. 2.27 – Circuito de partida e operação do motor monofásico
A figura 2.27b mostra o diagrama fasorial na partida do motor onde se vê a corrente de partida do motor I composta das correntes Ia do enrolamento auxiliar, adiantada da tensão V, e Im do
enrolamento principal, atrasada da tensão V. Alguns motores têm capacitor permanente no seu circuito auxiliar. Nesse caso, o circuito auxiliar não é interrompido após a partida, permanecendo ligado durante a operação normal do motor. Quando se deseja inverter o sentido de rotação do motor
monofásico basta inverter entre si os terminais do enrolamento auxiliar ligados aos terminais do
enrolamento principal.
Devido ao seu baixo rendimento por causa das elevadas perdas jóulicas do rotor, os motores
monofásicos não devem ser usados no acionamento de cargas acima de 1 kW, mas sim no acionamento de cargas pequenas, ditas fracionárias, (frações de 1 kW), tais como pequenos compressores
de ar, máquinas rurais, bombas dágua etc.
É possível operar um motor trifásico ligado a uma rede monofásica. Esta possibilidade pode
ocorrer, por exemplo, nas redes rurais que alimentam as fazendas e chácaras por redes monofásicas
e se dispõe de um motor trifásico.
Fig. 2.28 – Ligação de um motor trifásico em rede monofásica
A figura 2.28 mostra as ligações que devem ser feitas para se ligar um motor trifásico a uma
rede monofásica. O capacitor melhora o rendimento e a operação do motor, além de determinar o
sentido de rotação.Quando ele está instalado entre os terminais T3 e T2 (A) o motor gira no sentido
82
horário ou anti-horário. Quando instalado entre os terminais T3 e T1 (B) ele vai girar no sentido oposto ao anterior
Evidentemente, a potência do motor será reduzida de 57,74% e seu desempenho não será tão
estável como se ele estivesse ligado a uma rede trifásica. O problema da falta de conjugado de partida vai aparecer e será necessário resolvê-lo de alguma forma, por exemplo, usando um pequeno
motor a gasolina ou diesel suficiente para girar o motor, sendo em seguida desacoplado.
B) CIRCUITO EQUIVALENTE
O circuito equivalente para um motor trifásico representa uma fase do motor quando ele gira
com um escorregamento s. Quando s=1, ou seja, quando o motor está parado, aquele circuito representa também o circuito equivalente do motor monofásico na condição parado, o que equivale dizer,
ligado à rede, produzindo um campo pulsativo. A figura 2.29a mostra as constantes do circuito equivalente para esta condição sendo V a tensão aplicada ao motor, Im a corrente do estator.
De acordo com a teoria dos dois campos girantes, a amplitude de cada fluxo é igual à metade
da do fluxo pulsativo e giram com a mesma freqüência angular desse último, em sentidos opostos,
induzindo correntes e tensões no rotor. Estando o rotor travado, estas tensões e correntes serão de
freqüência igual à do estator. O circuito equivalente que representar a condição de rotor travado,
usando a teoria dos dois campos girantes, deve ser equivalente ao da figura 2.29a e produzir os
mesmos resultados. Ora, como a tensão Em no circuito equivalente da figura 2.29a é induzida pelo
fluxoφ, representado pela reatância magnetizante Xϕ, as tensões Emf e Emb que serão induzidas com o
rotor travado, pelos dois fluxos girantes, serão iguais à metade de Em. Assim sendo, as reatâncias
correspondentes aos dois fluxos girantes serão iguais à metade de Xϕ. O mesmo pode ser dito da
reatância de dispersão X2 e da resistência R2 do rotor.
Figura 2.29: circuitos equivalentes
O circuito equivalente com o rotor travado e com a presença dos dois fluxos girantes será
representado pela figura 2.29b. As impedâncias Zf e Zb, em série, são iguais à impedância Zf do circuito equivalente da figura 2.29a, igual a Xϕ em paralelo com Z 2 = R2 + jX 2 . As tensões Emf e Emb
foram induzidas, respectivamente, pelos campos direto e reverso.
Quando o motor está operando, o escorregamento das tensões e correntes induzidas no rotor
pelo campo direto é s e pelo campo inverso é s , = 2 − s . Assim, por analogia com o circuito equiva-
83
lente do motor trifásico, a figura 2.29c representa o circuito equivalente do motor monofásico, em
qualquer condição de operação, inclusive com o rotor travado, quando se faz s =1.
C) ANÁLISE DO CIRCUITO EQUIVALENTE
As variações da tensão, corrente, velocidade e conjugado do motor monofásico podem ser
feitas a partir da análise do circuito equivalente e é semelhante à que foi feita para o motor trifásico.
A reatância magnetizante Xϕ divide o circuito em duas partes: à esquerda, o estator e à direita, o
rotor. As impedâncias Zf e Zb são facilmente calculáveis, isto é:
Z f = R f + jX f =
Z b = Rb + jX b =
0,5 R2
+ j 0,5 X 2 em paralelo com jXm.
s
0,5 R2
+ j 0,5 X 2 em paralelo com jXm.
(2 − s )
A potência eletromagnética transferida ao rotor é igual à soma das potências eletromagnéticas transferidas por cada um dos fluxos girantes, ou seja:
Pem = Pemf + Pemb
[2.55]
sendo Pemf = R f I m2 e Pemb = Rb I m2 as potências eletromagnéticas transferidas pelos fluxos direto e
reverso, respectivamente.
As potências mecânicas internas correspondentes serão iguais a:
(
)
Pmif = (1 − s )Pemb e Pmib = 1 − s ' Pemb = (1 − 2 + s )Pemb = −(1 − s )Pemb
[2.56]
A potência mecânica interna atuando no rotor será a soma das potências mecânicas internas
obtidas em [2.56], ou seja:
Pmi = Pmif + Pmib = (1 − s )(Pemf − Pemb )
[2.57]
O conjugado eletromagnético interno que atua sobre o rotor é resultado da ação simultânea
dos conjugados eletromagnéticos devidos a cada um dos fluxos, ou seja:
C mi = C mif + C mib =
Pmif + Pmib
ω
=
(1 − s )(Pemf
ω
− Pemb )
=
Pemf − Pemb
ω1
sendo ω1 a velocidade síncrona do fluxo girante.
A perda jóulica total do rotor será igual à soma das perdas jóulicas devidas as correntes produzidas pelos dois campos. Teremos:
(∆P )
j2 f
= sPemf ; (∆Pj 2 )b = (2 − s )Pemb ∴ ∆Pj 2 = sPemf + (2 − s )Pemb
[2.58]
84
A potência mecânica útil será igual à potência mecânica interna calculada em [2.58] menos
as perdas rotacionais a vazio.
D) EXEMPLOS
1) Um motor de indução monofásico com capacitor de partida, de 250 W, 120 V, 60 Hz,
possui os seguintes valores para as constantes de seus enrolamentos principal e auxiliar:
Enrolamento principal: Z m = Rm + jX m = 4,5 + j 3,7 = 5,826∠39,43o
Enrolamento auxiliar: Z a + Ra + jX a = 9,5 + j 3,5 = 10,12∠20,22 o
Pede-se calcular o valor de capacitância de partida que estabeleça entre as correntes do enrolamento principal Im e do enrolamento auxiliar Ia um ângulo de 90o, conforme mostra a figura 2.27.
SOLUÇÃO
A corrente Im está atrasada da tensão V do ângulo dado por:
Im =
120∠0 o
= 20,6∠ − 39,43 o
o
5,826∠39,43
O ângulo de fase da corrente Ia com a tensão V para haver um defasamento de 90º entre as
duas correntes deverá ser igual a:
φ a = 90 o − 36,43o = 53,57 o
Para isto, a reatância Xc do capacitor deve satisfazer a seguinte relação:
arctan
Xc − Xl
X − 3,5
X − 3,5
= arctan c
= 53,57 ∴ c
= 1,355 ∴ X c = 16,37 ohms.
9,5
9,5
Ra
10 6
10 6
A capacitância C será igual a: C =
=
= 162 µF (R)
X c 2πf 16,37 × 377
2) As constantes do circuito equivalente de um motor monofásico ¼ de CV, 110 V, 60 Hz, 4
polos, têm os seguintes valores:
R1=2,02 ohms; R2=4,12 ohms; X1=2,79 ohms; X2 = 2,12 ohms; Xm=66,8 ohms
As perdas rotacionais a vazio somam 37 watts.
Pede-se determinar as grandezas abaixo quando o motor opera com um escorregamento igual a 0,05.
a) A corrente do estator;
85
b)
c)
d)
e)
f)
O fator de potência;
A potência de saída;
A velocidade;
O conjugado útil ou de saída;
O rendimento
SOLUÇÃO
a) As impedâncias Zf e Zb devem ser as primeiras a serem calculadas. Substituindo os valores dados temos:
Z f = R f + jX f = 15,95 + j 20,14
Z b = Rb + jX b = 0,99 + j1,06
A impedância do estator Z 1m = R1m + jX 1m = 2,02 + j 2,79 está em série com as impedâncias
acima e serão somadas para obter a impedância total do motor, ou seja:
Z mot = Z f + Z b + Z 1m = 18,96 + j 24 = 30,6∠51,7 o
A corrente do estator será, pois: I m =
110
= 3,59∠ − 51,7 o (R)
30,6
b) Fator de potência = cos 51,7o = 0,620 (R)
c) A potência de saída é igual à potência mecânica interna Pmi menos as perdas rotacionais a
vazio. Temos os seguintes resultados:
Pemf = 3,59 2 × 15,95 = 206 W; Pemb = 3,59 2 × 0,99 = 12,8 W
P = (1 − 0,05)(206 − 12,8) − 37 = 146,5 W (R)
d) n = n1 (1 − s ) = 1800(1 − 0,95) = 1710 RPM (R)
e) Temos: C [Nm}] = 9550
f) η =
P[kW ]
0,1465
= 9550
= 0,818 Nm (R)
1710
n[RPM ]
P 146,5
=
= 0,60 (R)
P1
244
Para reduzir os cálculos numéricos, muitas vezes se despreza, na impedância Zb, a reatância
0,5Xm e, para pequenos valores de escorregamento, se despreza s, tornando a resistência igual a
0,25R2.
E) EXERCÍCIOS PROPOSTOS
86
1) Um motor de indução monofásico de 230 V, 60 Hz, 4 polos, gira a1728 RPM. As constantes de seu circuito equivalente são:
R1m = R2 = 8 ohms; X1m = X2 = 12 ohms; Xϕ = 200 ohms.
a)
b)
c)
d)
A corrente de entrada
A potência de entrada
A potência mecânica interna
O conjugado eletromagnético interno
Respostas: a) 2,6 A; b) 382,7 W; c) 293,3 W; d) 1,62 Nm
5.2) Resolver o exemplo da seção 4) desprezando na impedância Zb a reatância 0,5CXm e o
escorregamento s.
5.3) Um motor de indução monofásico de 110 V, 4 polos, 60 Hz, possui as seguintes constantes do circuito equivalente:
R1m = R2 = 2 ohms; X1m = X2 = 2 ohms; Xϕ = 50 ohms.
A perda magnética no núcleo do estator é de 25 W e a perda mecânica vale 10 W. Para o
motor operando a 1620 RPM, pede-se calcular:
a) A potência de entrada do motor
b) O rendimento.
Respostas: a) 800 W; b) 60%
5.4) As constantes do circuito equivalente de um motor monofásico de indução de 230 V, 60
Hz, 6 polos são:
R1m = R2 = 10 ohms; X1m = X2 = 10 ohms; Xϕ = 100 ohms.
Para um escorregamento de 5%, pede-se calcular:
a) A corrente de entrada
b) O fator de potência
c) c) O conjugado eletromagnético interno.
Respostas: a) 3,68 A; b) cosϕ = 0,50; c) 1,84 Nm.
ΩΩΩΩΩΩΩΩΩΩ.