CONTROLADORES
ELETRÔNICOS
Amplificadores Operacionais
Aplicados em:
Amplificadores
Filtros
É prática comum escolher o ponto
de terra como sendo 0 Volt e
medir as tensões de entrada e1 e
e2 em relação a este ponto
O sinal de entrada e1 (terminal negativo) é invertido
O sinal de entrada e2 (terminal positivo) não é invertido
e0 = K (e2 − e1 ) = − K (e1 − e2 )
•e1 e e2 podem ser sinais CC ou CA
•K é o ganho do amplificador
A magnitude de K é de aproximadamente
105 ~ 106 para sinais CC e CA com
freqüências menores que 10 Hz
O ganho diferencial K diminui com a
freqüência e torna-se próximo da unidade
para freqüências de 1 MHz ~ 50 MHz
Como K é muito alto, é necessário uma
realimentação negativa da saída para a
entrada a fim de tornar o amplificador
estável
Amplificador Operacional Ideal
Não flui corrente através dos terminais de
entrada
A tensão de saída não é afetada pela carga
conectada ao terminal de saída
Impedância de entrada é infinita
Impedância de saída é nula
Amplificador Operacional Real
Uma corrente muito pequena (quase
desprezível) flui para um terminal de entrada
A saída não pode ser carregada
demasiadamente
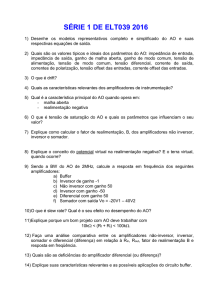
Amplificador inversor
ei − e '
i1 =
R1
e ' − eo
i2 =
R2
i1 ≈ i2
ei − e ' e ' − eo
=
R1
R2
e ≅0
'
ei − eo
=
R1
R2
Não flui corrente através dos
terminais de entrada
eo = −
R2
ei
R1
O circuito é um amplificador com inversão de sinal
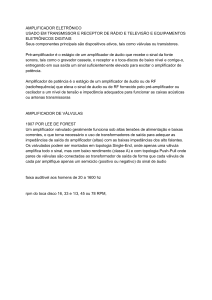
Amplificador não-inversor
≡
eo = i (R1 + R2 )
eo = K (ei − e1 )
e1 = iR1
R1
e1 =
eo
R1 + R2
R1
eo = K ei −
eo
R1 + R2
R1
eo = K ei −
eo
R1 + R2
R1
1
+ eo
ei =
R1 + R2 K
Como
K >> 1 , e se
R1
1
>>
R1 + R2
K
R2
eo = 1 + ei
R1
O circuito é um amplificador não inversor
Exemplo – obter a função de
transferência
ei − e '
i1 =
R1
d (e ' − eo )
i2 = C
dt
e ' − eo
i3 =
R2
Observando que a corrente que flui para o amplificador é desprezível
i1 = i2 + i3
(
)
ei − e '
d e ' − eo e ' − eo
=C
+
R1
dt
R2
Como
e' ≅ 0
deo eo
ei
= −C
−
dt R2
R1
Aplicando a transformada de Laplace
Ei ( s )
R2Cs + 1
=−
Eo ( s )
R1
R2
Eo ( s )
R2
1
=−
Ei ( s )
R1 R2Cs + 1
Método das impedâncias para
obtenção das funções de
transferência
Ei ( s ) = Z1 ( s ) I ( s )
Eo ( s ) = − Z 2 ( s ) I ( s )
Eo ( s )
Z 2 (s)
=−
Ei ( s )
Z1 ( s )
Exemplo – obter a função de
transferência
As impedâncias são:
eo
de
e
=C o + o
Z2
dt R2
Z1 ( s ) = R1
1
Logo
R2
Z 2 (s) =
=
1
R2Cs + 1
Cs +
R2
R2
Eo ( s ) = −
I (s)
Ei ( s ) = R1 I ( s )
R2Cs + 1
Eo ( s )
R2
1
=−
Ei ( s )
R1 R2Cs + 1
Função de transferência
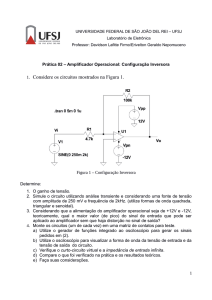
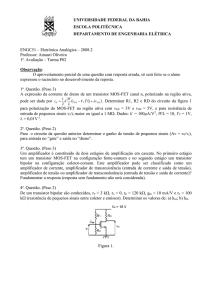
Controlador PID usando
amplificadores operacionais
E (s)
Z2
=−
Ei ( s )
Z1
Onde:
R1
Z1 =
R1C1s + 1
R2C2 s + 1
Z2 =
C2 s
Assim:
R2C2 s + 1 R1C1s + 1
E (s)
= −
Ei ( s )
C2 s R1
Levando em conta que:
Eo ( s )
R4
=−
E ( s)
R3
Tem-se:
Eo ( s ) Eo ( s ) E ( s ) R4 R2 (R1C1s + 1)(R2C2 s + 1)
=
=
Ei ( s ) E ( s ) Ei ( s ) R3 R1
R2C2 s
1
R4 R2 R1C1 + R2C2
=
+
+ R1C1s
R3 R1
R2C2
R2C2 s
1
R4 (R1C1 + R2C2 )
R1C1 R2C2
1+
=
+
R3 R1C2
(R1C1 + R2C2 )s R1C1 + R2C2
s
Eo ( s ) R4 (R1C1 + R2C2 )
1
R1C1 R2C2
1 +
=
+
Ei ( s )
R3 R1C2
(R1C1 + R2C2 )s R1C1 + R2C2
s
Lembrando que:
Kp
de(t )
u (t ) = K p e(t ) +
e
t
dt
+
K
T
(
)
p d
Ti ∫0
dt
t
1
U (s)
= K p 1 +
+ Td s
E (s)
Ti s
Temos:
R4 (R1C1 + R2C2 )
Kp =
R3 R1C2
Ti = R1C1 + R2C2
R1C1 R2C2
Td =
R1C1 + R2C2
Em termos de ganho proporcional, ganho integral e ganho
derivativo tem-se
R4 (R1C1 + R2C2 )
Kp =
R3 R1C2
R4
Ki =
R3 R1C2
R4 R2C1
Kd =
R3
Principais ações de controle
com controladores eletrônicos
empregando amplificadores
operacionais