UNIVERSIDADE FEDERAL DE OURO PRETO
ESCOLA DE MINAS – EM
COLEGIADO DO CURSO DE ENGENHARIA DE
CONTROLE E AUTOMAÇÃO – CECAU
CONTROLE DE TEMPERATURA DE UMA ESTUFA POR MEIO DE UMA
PLATAFORMA DE INSTRUMENTAÇÃO
O VIRTUAL
MONOGRAFIA DE GRADUAÇÃO
O EM ENGENHARIA DE CONTROLE E
AUTOMAÇÃO
CARLLO ALVES RIBEIRO VAZ
Ouro Preto, 2008
CARLLO ALVES RIBEIRO VAZ
CONTROLE DE TEMPERATURA DE UMA ESTUFA POR MEIO DE UMA
PLATAFORMA DE INSTRUMENTAÇÃO VIRTUAL
Monografia apresentada ao Curso de
Engenharia de Controle e Automação
da Universidade Federal de Ouro Preto
como parte dos requisitos para a
obtenção do Grau de Engenheiro de
Controle e Automação
Orientador: Prof. Dr. Henor Artur de Souza
Co-orientador: Prof. Dr. Ronilson Rocha
Ouro Preto
Escola de Minas – UFOP
Abril/2008
ii
iii
AGRADECIMENTOS
Agradeço, primeiramente, a Deus por me proporcionar o conhecimento e a
paciência necessária à realização deste trabalho. À minha família, meus principais
apoiadores e por terem me feito acreditar que tudo e possível quando se tem dedicação e
perseverança. À turma de Engenharia de Controle e Automação 2007/1 anos de
convívio e pelos grandes amigos que conquistei. Ao Alexandre (Toshiba) e Leonardo
pelas horas de estudos e pelos inúmeros, e muitas vezes desesperadores, trabalhos em
conjunto.
Agradeço também a Escola de Minas e aos professores por me ensinarem a
engenharia e os valores éticos relativos à profissão do engenheiro. Aos professores
Henor e Ronilson por me creditarem e acreditarem no meu trabalho e por me orientarem
na durante a realização deste trabalho.
Agradeço, ainda, a República Caverna e aos irmãos de república por
fazerem parte da minha vida tendo se tornado uma parte importante na minha história.
À Ouro Preto, cidade de histórias dentre as quais se encontram uma parte da minha.
Finalmente, agradeço a UFOP e a Faculdade de Engenharia da Universidade
do Porto, Portugal, instituições que responsáveis pela minha formação acadêmica e
profissional.
iv
“O rio atinge seus objetivos porque aprendeu a contornar obstáculos.”
(Lao- Tsé)
v
SUMÁRIO
LISTA DE FIGURAS ................................................................................................... vii
LISTA DE TABELAS ................................................................................................. viii
RESUMO ........................................................................................................................ ix
ABSTRACT ..................................................................................................................... x
I – INTRODUÇÃO ......................................................................................................... 1
1.1 Objetivos ................................................................................................................. 3
1.2 Metodologia ............................................................................................................ 3
1.3 Estrutura da Monografia ......................................................................................... 4
II – SISTEMAS DE CONTROLE................................................................................. 6
2.1 Histórico de Sistemas de Controle .......................................................................... 7
2.2 Controle em Malha Fechada ................................................................................... 8
2.3 O Problema de Controle ....................................................................................... 10
2.4 Sistema de Controle Digital .................................................................................. 10
III – PLATAFORMA DE INSTRUMENTAÇÃO VIRTUAL ................................. 13
3.1 Circuito de Medição.............................................................................................. 13
3.2 LABVIEW ............................................................................................................ 15
3.3 Circuito de Potência .............................................................................................. 16
3.3.1 Fonte de Tensão Contínua Estabilizada ........................................................ 16
3.3.2 Circuito Integrado de Controle de Fase (TCA785) ...................................... 17
3.3.3 Tensão de Sincronismos (TIL111) ............................................................... 19
3.3.4 Conversor de Potência a Triac – Optoacoplador MOC3020 ........................ 20
3.4 Placa de aquisição de dados .................................................................................. 21
3.4.1 Circuito de Entrada Analógica ...................................................................... 22
3.4.2 Circuito de Saída Analógica ......................................................................... 23
3.4.3 Modos de Medir as Entradas Analógicas ..................................................... 24
IV - PROJETO DO SISTEMA DE CONTROLE ..................................................... 25
4.1 Identificação da Função de Transferência da Estufa ............................................ 25
4.1.1 Escolha e Coleta de Sinais ............................................................................ 26
4.1.1.2 Escolhas da Variável de Entrada e de Saída ..................................... 26
4.1.1.2 Escolha dos Sinais de Excitação ....................................................... 26
4.1.2 Modelo Determinístico ................................................................................. 29
4.1.3 Estimação dos Parâmetros do Modelo do Processo...................................... 30
4.1.4 Validação do Modelo Obtido ........................................................................ 34
4.2 Projeto do Controlador.......................................................................................... 36
4.2.1 Ação de Controle Proporcional..................................................................... 37
4.2.2 Ação de Controle Integral ............................................................................. 38
4.2.3 Ação de Controle Derivativo ........................................................................ 38
4.2.4 Sintonia de Controladres PID ....................................................................... 39
4.2.4.1 Método de Ziegler-Nichols para Sintonia de Controladores PID ..... 40
vi
4.2.4.2 Precisão em Regime Estacionário..................................................... 43
V - AVALIAÇÃO EXPERIMENTAL DO CONTROLADOR ................................ 44
VI - CONCLUSÃO ....................................................................................................... 47
REFERÊNCIAS BIBLIOGRÁFICAS ........................................................................ 48
ANEXO A ...................................................................................................................... 51
vii
LISTA DE FIGURAS
FIGURA 1.1 – Exemplo de uma Plataforma de Testes Baseada em Instrumentação
Virtual ........................................................................................................................... 2
FIGURA 2.1 – Diagrama de Blocos de um Sistema de Controle..................................... 8
FIGURA 2.2 – (a) Sinal Analógico; (b) Sinal Discreto .................................................. 11
FIGURA 2.3 – Diagrama de Blocos de um Sistema de Controle Digital ...................... 11
FIGURA 3.1 – Diagrama de Blocos do Sistema ............................................................ 13
FIGURA 3.2 – Circuito de Medição ............................................................................... 14
FIGURA 3.3 – Circuito Elétrico da Fonte de Tensão Estabilizada ................................ 17
FIGURA 3.4 – Circuito Elétrico para Controle de Fase com o TCA785 ....................... 18
FIGURA 3.5 – Diagrama de Pulsos do TCA785............................................................ 19
FIGURA 3.6 – Circuito de Sincronismo ........................................................................ 19
FIGURA 3.7 – Conversor de Potência a Triac ............................................................... 20
FIGURA 3.8 – Placa de Aquisição de Dados NI USB-6009.......................................... 21
FIGURA 3.9 – Circuito de Entrada Analógica. .............................................................. 23
FIGURA 3.10 – Circuito de Saída Analógica. ............................................................... 23
FIGURA 3.11 – Modo de conexão diferencial. .............................................................. 24
FIGURA 3.12 – Modo de conexão RSE......................................................................... 24
FIGURA 4.1 – Curvas Degrau x Resposta do Sistema para o Primeiro Conjunto de
Dados .......................................................................................................................... 27
FIGURA 4.2 – Curvas Degrau x Resposta do Sistema para o Segundo Conjunto de
Dados .......................................................................................................................... 28
FIGURA 4.3 – Curvas Degrau x Resposta do Sistema para o Terceiro Conjunto de
Dados .......................................................................................................................... 28
FIGURA 4.4 – Resposta do Processo de Primeira Ordem a uma Entrada Degrau ........ 29
FIGURA 4.5 – Curva Aproximada para o Primeiro Conjunto de Dados ....................... 31
FIGURA 4.6 – Curva Aproximada para o Segundo Conjunto de Dados ....................... 31
FIGURA 4.7 – Curva Aproximada para o Terceiro Conjunto de Dados ....................... 32
FIGURA 4.8 – Curva de Validação do Modelo Obtido ................................................. 35
FIGURA 4.9 – Simulação do Modelo Obtido ................................................................ 35
FIGURA 4.10 – Controle PID do Processo .................................................................... 40
FIGURA 4.11 – Modelo para Obtencao de Parâmetros de Primeira Ordem ................. 41
FIGURA 5.1 – Diagrama de Blocos do Sistema de Controle ........................................ 42
FIGURA 5.2 – Algoritmo de Controle implementado no LABVIEW. .......................... 44
FIGURA 5.3 – Resposta do Controlador ao Setpoint. .................................................... 45
FIGURA 5.4 – Variação para o Setpoint Proposto ......................................................... 46
viii
LISTA DE TABELAS
TABELA 3.1 – Pinagem do TCA785. ............................................................................ 17
TABELA 3.2 – Terminais de entradas analógicas e digitais .......................................... 22
TABELA 4.1 – Valores AIC para cada modelo obtido. ................................................. 33
TABELA 4.2 – Controlador recomendado em função do tempo de resposta da malha. 40
TABELA 4.3 – Regra de sintonia de Ziegler-Nichols baseada na resposta ao degrau da
planta (primeiro método). ........................................................................................... 42
TABELA 5.1 – Análise de desempenho do controlador ................................................ 46
ix
RESUMO
O controle de sistemas é uma interconexão de componentes que formam uma
configuração em que o sistema controlado provê uma resposta dentro de padrões préestabelecidos. Neste contexto, o controle de sistemas em malha fechada tem por
objetivo determinar suas características ou comportamento. Neste projeto, realiza-se um
estudo sobre o controle de temperatura em malha fechada em estufas aquecidas por
resistências elétricas. Por meio do desenvolvimento de uma estratégia de controle PID
que mantém-se o comportamento do sistema dentro dos padrões desejados. A planta
piloto foi desenvolvida nos moldes de uma plataforma de instrumentação virtual,
composta de um circuito de medição de temperatura, o software LABVIEW e um
circuito de potência que atua sobre a resistência. Para a coleta de dados foram realizados
testes utilizando-se uma entrada do tipo degrau. Com os conjuntos de dados faz-se a
identificação do modelo da planta por meio de um modelo determinístico de primeira
ordem, determinando-se o ganho, a constante de tempo e o atraso puro de tempo. São
obtidos três modelos e o Critério de Informação de Akaike e utilizado para determinar
qual o melhor modelo a ser utilizado. Segue-se a esta etapa o projeto do controlador
utilizando o método da malha aberta (primeiro método) de Ziegler-Nichols e a sua
integração com a planta piloto. O controlador foi implementado em um algoritmo
construído em linguagem gráfica do LABVIEW. O controlador PID desenvolvido
apresentou um desempenho satisfatório mantendo a temperatura da estufa próximo ao
valor desejado, com um erro de estabilização de no máximo 2%.
Palavras-Chave: controle de temperatura, instrumentação virtual, LABVIEW, sintonia
de controladores PID.
x
ABSTRACT
The control systems is an interconnection of components that form a setting in which
the controlled system provides an answer within a pre-established standards. in this
context, the control systems in closed-loop aims to determine its characteristics and
dynamic behavior. In this project it holds a study on the control of temperature in closed
loop in stove heated by electric resistance. Through the development of a strategy to
control PID that seeks to keep the system within the desired standards. The pilot plant
was developed in the form of a platform for virtual instrumentation, composed of a
circuit for measuring temperature, the software LABVIEW and a circuit of power that
acts on the resistance. For collecting data tests were conducted using a type of entry
step. With the data sets it is the identification of the model of the plant through a
deterministic model of the first order, setting up the gain, the constant of time and the
delay time. Three models are obtained and the Akaike Information Criterion, was used
to determine the best model to be used. It follows this stage of the project controller
using the method of the open loop (first method) of Ziegler-Nichols and its integration
on the pilot plant. The controller was implemented in an algorithm built in LABVIEW
graphic language. The PID controller developed presented a satisfactory performance
while maintaining the temperature of the stove near the desired value, with a
stabilisation error no more than 2%.
Key-Words: temperature control, virtual instrumentation, LABVIEW, line of PID
controllers.
1
CAPÍTULO I
I – INTRODUÇÃO
Dentre todas as grandezas mensuráveis a temperatura está entre as mais
importantes. A noção de temperatura está associada ao estado de quente e frio, a
transferência de energia térmica, ao aquecimento e arrefecimento dos corpos. Estas
alterações, por sua vez, estão ligadas ao estado de agitação molecular do material que
determina o potencial de energia cinética dos corpos. Sendo assim, pode-se afirmar que
a temperatura é diretamente proporcional ao estado de agitação molecular do corpo.
Vários métodos são utilizados para medir temperatura. Os mais comuns
utilizam termômetros de vidro, de mercúrio ou álcool, ou, de elementos bimetálicos.
Outros tipos de métodos também são bastante utilizados e incluem termopares,
resistências variáveis com a temperatura e os termistores, além de circuitos integrados.
A importância de mensurar esta grandeza reside no fato de estar relacionado
com fatores como conforto, segurança e qualidade.
O controle de temperatura pode ser realizado de várias formas. A estratégia
utilizada neste trabalho está associada ao desenvolvimento de um controlador PID. Os
controladores PID são estudados desde o início do século passado e são utilizados em
90% das aplicações práticas pela facilidade de implementação e de sua flexibilidade.
Em particular, quando o modelo matemático da planta não é conhecido e, portanto,
métodos de projeto analítico não podem ser utilizados, controles PID se mostram os
mais úteis (OGATA, 2003). Ainda, a utilização de ferramentas computacionais para a
realização do controle PID de processos vem sendo cada vez mais utilizada devido à
capacidade de processamento e da precisão adquirida com a sua utilização.
Neste contexto, podem-se incluir os sistemas de instrumentação virtual que
são formados por um computador e um instrumento de medida ou equipamento de
comando (ambos reais). Um programa executado no computador torna o instrumento ou
o equipamento acessível ao operador por meio de uma interface gráfica de software.
Esta interface é dotada de botões, chaves, mostradores, indicadores, painéis de exibição
gráficos, etc, apresentados como objetos interativos, animados sob a ação do operador
via apontador do mouse. O instrumento conectado ao computador pode ser desde um
2
equipamento completo, como um osciloscópio, frequencímetro etc, ou mesmo um
simples sensor como um termopar, um extensômetro, etc.
Para operar um instrumento ou equipamento de comando via computador, é
necessário que o instrumento disponha de uma interface eletrônica de comunicação que
possa se adaptada ao computador (FIGURA 1.1). Uma maneira de se realizar essa
adaptação é a utilização de placas de aquisição de dados que dispõe de entradas e saídas
analógicas e digitais.
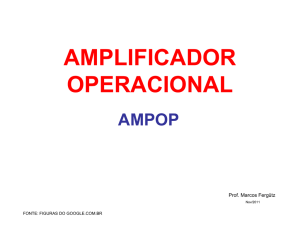
FIGURA 1.1 – Exemplo de uma plataforma de testes baseada em Instrumentação Virtual.
Fonte: INTRODUCTION..., 2005a.
A concepção mais elementar de se implementar a operação do instrumento
via computador é construir um programa em alguma linguagem declarativa (como C,
Java, Pascal, BASIC) e executá-lo, capturando via teclado as entradas do usuário e
apresentando os resultados na tela do monitor em forma numérica ou de um gráfico.
Essa foi a abordagem tradicional durante vários anos e, ainda atualmente é largamente
utilizada (KOGLER JR, 2004). Todavia, esse método requer o conhecimento de
3
programação de computadores e de transmissão digital de dados. Com o advento dos
ambientes gráficos de programação e visando simplificar a tarefa de quem desenvolve
aplicações que manipulam dados de instrumentos, surgiram as chamadas linguagens de
programação visual. Uma dessas linguagens é usada pelo LABVIEW, da National
Instruments, que é a linguagem utilizada na concepção deste trabalho.
1.1 Objetivos
O objetivo deste trabalho é realizar o controle de temperatura de uma estufa
por meio de uma plataforma de instrumentação virtual.
O controle e realizado em
malha fechada por meio do desenvolvimento de uma estratégia de controle PID.
1.2 Metodologia
Neste trabalho visa-se construção de um aplicativo em LABVIEW para a
implementação de um controlador PID para temperatura de uma estufa. Utilizam-se um
sensor de temperatura, um circuito de potência para o acionamento da resistência
elétrica da estufa e uma placa de aquisição de dados que faz a interface entre o
LABVIEW e os equipamentos. Alem disso, utiliza-se técnicas de identificação de
sistemas para a obtenção do modelo matemático que descreve o comportamento
dinâmico da estufa (processo).
O primeiro passo para o projeto do controlador PID é a montagem da planta
e seu correto funcionamento. Inicialmente, os valores de temperatura são medidos por
um termopar tipo K e por meio de uma placa de aquisição de dados repassados ao
computador. Seguindo os critérios proposto por Aguirre (2004), uma entrada degrau é
aplicada ao sistema para que a realização da coleta de dados. São feitos três testes para a
obtenção dos dados necessários à identificação do modelo matemático que descreve o
comportamento dinâmico da estufa. Com os conjuntos de dados disponíveis (tensão de
controle e temperatura) é feita a identificação do modelo matemático da planta por meio
de um modelo determinístico de primeira ordem, ou seja, determina-se o ganho estático,
o atraso puro de tempo e a constante de tempo do sistema.
Um algoritmo de controle é desenvolvido em linguagem gráfica no
LABVIEW. Este programa inclui bloco de controle PID no qual se insere os valores dos
4
parâmetros calculados do controlador, bem como outros blocos que se fazem necessário
para a realização do controle de temperatura da estufa. Além disso, um circuito de
potência é desenvolvido para que a resistência elétrica da estufa possa ser acionada. O
controle da temperatura é feito indiretamente por meio do controle do ângulo de disparo
de um TRIAC presente no circuito de potência, ou seja, controlando-se a potência que e
dissipada na resistência elétrica da estufa.
O último passo são a avaliação experimental e a verificação do desempenho
do controlador PID por meio da comparação do erro de regime permanente eSS teórico
e do erro de estabilização da temperatura eS .
1.3 Estrutura da Monografia
No capítulo 1 comenta-se sobre os principais métodos de medição e controle
de temperatura de sistemas térmicos. Apresentam-se os objetivos e a metodologia
adotada para a identificação do modelo da planta e para o projeto do controlador.
No capítulo 2 apresenta-se um breve histórico dos sistemas de controle e
também alguns conceitos sobre controle de sistemas em malha fechada. Por último fazse uma apresentação das etapas a serem seguidas no projeto de um sistema de controle e
uma descrição do controle realizado por computador.
No capítulo 3 é abordado a descrição da plataforma de instrumentação
virtual utilizada no trabalho. Descreve-se detalhadamente o circuito de medição com a
utilização do AD595, o software LABVIEW, o circuito de potência e a placa de
aquisição utilizada no interfaceamento dos equipamentos com o computador.
No capítulo 4 trata-se da identificação do modelo matemático do processo
por meio de um modelo determinístico de primeira ordem. Apresentam-se os dados
coletados com os respectivos modelos obtidos para cada conjunto de dados. São
apresentados as curvas de ajuste para cada modelo obtido e por meio do Critério de
Informação de Akaike determina-se o melhor modelo para ser utilizado como modelo
do processo. Em seguida é feita a validação do modelo por meio de uma simulação e
comparação entre a curva experimental obtida e a curva obtida pela simulação do
modelo do processo, considerando as mesmas condições iniciais. Além disso, é
realizado uma descrição das ações de controle proporcional, integral e derivativo. Em
seguida é apresentado o método de malha aberta de Ziegler-Nichols para a sintonia de
5
controladores PID e, a partir deste método, calcula-se os valores dos parâmetros do
controlador PID seguindo este método.
No capítulo 5 trata-se da avaliação experimental do sistema de controle
projetado e da sintonia fina do controlador. São apresentados os erros de regime
permanente teórico e o erro de estabilização da temperatura. Além disso, é mostrado e
explicado o algoritmo desenvolvido no LABVIEW para um melhor entendimento da
ferramenta utilizada na realização do controle.
No capítulo 6 são apresentadas as conclusões obtidas neste trabalho.
6
CAPÍTULO II
II – SISTEMAS DE CONTROLE
Segundo Dorf e Bishop (2005) a engenharia é aceitável desde que os
materiais e as forças da natureza sejam compreendidos e controlados de modo a
beneficiar os seres humanos. Estes dois objetivos são complementares, já que sistemas
de controle requerem o seu entendimento e a sua modelagem. Além disso, a engenharia
de controle deve freqüentemente considerar o entendimento de sistemas complexos
como, por exemplo, os processos químicos.
Como explicitado anteriormente o controle de sistemas é uma interconexão
de componentes que formam uma configuração em que o sistema controlado fornece
uma resposta dentro de padrões pré-estabelecidos e/ou desejados.
A Engenharia de Controle é o ramo da engenharia responsável pelo
desenvolvimento da teoria de sistemas de controle, baseando-se nos fundamentos da
teoria e análise de sistemas lineares e na sua integração com as teorias de redes e
comunicações (DORF e BISHOP, 2005). Desta forma, a Engenharia de Controle pode
ser aplicada a várias áreas como as engenharias aeronáutica, química, elétrica,
mecânica, civil e ambiental.
Atualmente, o desafio para os engenheiros de controle engloba a
modelagem de modernos, complexos e inter-relacionados sistemas como os de
automação industrial. A automação é altamente utilizada em indústrias químicas, de
celulose, automobilísticas, siderúrgicas e de produção de energia.
Além disso, a indústria busca o desenvolvimento de produtos que são cada
vez mais precisos, confiáveis e robustos. Torna-se necessário a utilização de sistemas de
controle confiáveis e que permitam operar próximo aos limites impostos pela segurança,
pelo meio ambiente e pelo processo, o que possibilita alterar as condições normais de
operação para uma condição mais favorável. Os ganhos associados a uma menor
variabilidade se tornam ainda maiores em processos onde existem produtos com
diferentes graus ou especificações, como ocorre, por exemplo, no refino do petróleo e
em unidades de polimerização. Portanto, a seleção de uma boa estratégia de controle
permite reduzir o tempo de produção fora da especificação, e conseqüentemente
melhora o resultado econômico do processo.
7
Nos últimos anos os sistemas de controle têm sido implementados de
maneira a utilizar os benefícios dos controladores digitais. Controladores digitais são
utilizados para fornecer um desempenho ótimo, maximizando a produtividade e
minimizando os custos.
Mais recentemente, a aplicação do controle por computador possibilitou, por
exemplo, a locomoção inteligente de robôs industriais e a otimização e economia de
combustível em automóveis. A capacidade de tomada de decisão e a flexibilidade no
programa de controle são as maiores vantagens de um sistema de controle digital.
A tendência dos sistemas de controle em direção aos sistemas digitais de
controle se deve principalmente aos baixos custos dos computadores e as grandes
vantagens encontradas quando se trabalham com sinais digitais ao invés de sinais
analógicos.
2.1 Histórico de Sistemas de Controle
O primeiro trabalho significativo de controle automático foi o regulador
centrífugo construído por James Watt para o controle de velocidade de uma máquina a
vapor, no século XVIII (OGATA, 2003).
Desde então, o controle automático tem sofrido um grande avanço e se
tornou parte importante, atualmente, de sistemas espaciais, sistemas robóticos, além de
serem de grande importância em processos industriais que envolvem o controle de
pressão, de temperatura, de umidade, de viscosidade e de vazão.
Alguns termos importantes surgiram no decorrer do desenvolvimento do
controle automático, como, por exemplo, o próprio termo “automático” que implica no
controle efetuado sem a intervenção humana e o termo “realimentado” que foi utilizado
pela primeira vez nos Estados Unidos em 1920 quando do desenvolvimento de sistemas
telefônicos e amplificadores eletrônicos de realimentação por Bode, Nyquist e Black na
Bell Telephone Laboratories (DORF e BISHOP, 2005).
Nos primeiros estágios de desenvolvimento da teoria de controle, os
primeiros trabalhos significativos se devem a Minorsky, Hazen e Nyquist. Em 1934,
Hazen introduziu o termo “servomecanismos” para designar sistemas de controle de
posição. Segundo Ogata (2003) o desenvolvimento dos métodos de resposta em
freqüência possibilitou o projeto de sistemas de controle com requisitos de desempenho.
8
No final dos anos 40 e na década de 1950, a ênfase da teoria de controle foi para
projetos que utilizavam o método do lugar das raízes, desenvolvido por Evans. A partir
de 1960, a disponibilidade de computadores digitais tornou possível a análise no
domínio do tempo de sistemas complexos, possibilitando o desenvolvimento da
moderna teoria de controle baseada nas técnicas de análise e síntese por meio das
variáveis de estado. Atualmente, os desenvolvimentos da moderna teoria de controle
têm se concentrado no controle robusto, no controle de H2 e H∞ e tópicos associados.
2.2 Controle em Malha Fechada
O controle de sistemas em malha fechada utiliza um sinal de medição atual
da saída do sistema para comparar com um sinal de referência previamente
estabelecido. O sinal de saída medido é chamado de sinal de realimentação ou feedback.
Na FIGURA 2.1 mostra-se o diagrama de blocos e o fluxo de informações de um
sistema de controle em malha fechada SISO (Single Input Single Output).
E (S )
R (S )+
GC (S )
Tensão de
Controle
G (S )
Y (S )
-
H (S )
FIGURA 2.1 – Diagrama de Blocos de um Sistema de Controle em Malha Fechada
onde R(S ) é o sinal de entrada, Y (S ) o sinal de saída da planta e E (S ) o sinal de erro
atuante (diferença entre R(S ) e Y (S ) ).
Em geral, indicamos a função de transferência (modelo matemático) de
malha fechada por T (S ) , a função de transferência no caminho da alimentação direta e
representada por G (S ) e a função de transferência no caminho da realimentação por
H (S ) . Tem-se, portanto, que a função de transferência em malha fechada para o
diagrama apresentado é
9
T (S ) =
GC (S )GP (S )
Y (S )
=
R(S ) 1 + GC (S )G (S )H (S )
(2.1)
O elemento de medição (sensor) é a parte do sistema responsável por
realizar a medição de alguma propriedade do sistema, bem como a sua conversão em
alguma variável física que possa ser interpretada pelo sistema de controle. Em alguns
casos, isto não ocorre e torna-se necessário a utilização de elementos transdutores e
transmissores para converter e adequar o sinal ao sistema de controle. Ocorre em muitos
casos também de o próprio elemento sensor ser o elemento transdutor do sinal. O sinal
obtido pelo elemento de medição é, então, enviado ao controlador, que é a parte mais
importante do sistema de controle. O controlador funciona como o cérebro do sistema,
tomando decisões baseadas em informações disponíveis e repassando-as ao elemento
final de ação (atuador). O atuador é o elemento do sistema de controle responsável por
exercer a ação sobre o processo de modo a colocá-lo dentro dos padrões desejados.
Um sistema de controle em malha fechada utiliza-se de uma função que
relaciona o sinal de saída com o sinal de entrada. Geralmente a diferença entre o sinal
de saída e o sinal de entrada (sinal de erro do sistema) de um processo sob controle é
amplificada e utilizada no controle do processo, fazendo com que a diferença entre estes
sinais seja reduzida.
O controle de um sistema por meio de uma malha fechada oferece inúmeras
vantagens. O uso da realimentação faz com que a resposta do sistema seja relativamente
insensível a distúrbios e variações internas dos parâmetros do sistema (OGATA, 2003).
Dessa maneira, pode-se utilizar componentes relativamente imprecisos e baratos para
obter o controle preciso de determinado sistema. Por outro lado, um sistema de controle
em malha fechada faz com que o número de componentes e a complexidade no sistema
de controle aumentem, dentre eles o sensor que, geralmente, é o elemento de maior
custo do sistema de controle. Além disso, os sensores podem introduzir ruídos e
imprecisões no sistema.
O controle em malha fechada é utilizado para fornecer o máximo de
desempenho e robustez ao sistema. Qualitativamente, o desempenho de um sistema de
controle pode ser avaliado pela sua capacidade em manter a variável controlada
próximo a um valor desejado, mesmo em presença de perturbações externas. A robustez
deve proporcionar ao sistema de controle um bom desempenho tanto para pequenas
quanto para grandes perturbações.
10
2.3 O Problema de Controle
Um sistema físico ou processo deve ser precisamente controlado por meio
de uma realimentação ou uma operação em malha fechada. A variável de saída é
ajustada conforme o sinal de erro. Geralmente, é necessário um controlador ou um
compensador para filtrar o sinal de erro de forma que certos critérios ou especificações
sejam satisfeitos. Estes critérios podem envolver as seguintes características:
1. Rejeição a distúrbios.
2. Erro de regime estacionário.
3. Características da resposta transitória.
4. Sensibilidade a mudanças de parâmetros do processo.
Além disso, resolver o problema de controle envolve:
1. Escolha de sensores para medida da saída da planta.
2. Escolha de atuadores que irão agir sobre da planta.
3. Desenvolvimento de equações (modelos) da planta, dos atuadores e dos sensores.
4. Projeto do controlador baseado nos modelos desenvolvidos e critérios de controle.
5. Avaliar o projeto analiticamente, por simulação e, finalmente, por meio de testes do
sistema físico.
6. Se os testes físicos não forem satisfatórios, repetir estes estágios.
Devido às imprecisões nos modelos, os testes nos sistemas físicos de
controle normalmente não são satisfatórios. Deve-se, portanto, repetir o procedimento
de projeto, utilizando todas as ferramentas disponíveis para melhorar o sistema.
Geralmente as intuições, desenvolvida ao longo das experimentações com os sistemas
físicos, tornam-se um importante passo para o projeto (PHILLIPS e HARBOR, 2000).
2.4 Sistema de Controle Digital
Um sinal é chamando de contínuo no tempo ou sinal analógico se o mesmo
é definido para todo instante de tempo (FIGURA 2.2). A temperatura da estufa a ser
controlada é um exemplo de um sinal analógico.
11
FIGURA 2.2 – (a) Sinal analógico; (b) Sinal discreto.
Fonte: CHEN, 1993.
Como o objetivo deste trabalho é efetuar o controle de temperatura de uma
estufa de secagem por meio de uma plataforma de instrumentação virtual, é necessário
converter sinais analógicos em sinais digitais, tendo em vista que se utiliza um
computador para efetuar tal controle.
Um sinal digital, também chamado de sinal discreto (FIGURA 2.2), é
definido em instantes de tempo. Estes instantes de tempo nos quais o sinal discreto
aparece é chamado instantes de amostragem e o intervalo entre os instantes de
amostragem é denominado como período de amostragem.
Na FIGURA 2.3 apresenta-se o diagrama de blocos simplificado de um
sistema de controle digital. Os elementos básicos do sistema são mostrados nos blocos.
A operação do controlador é determinada pelo sinal de clock.
FIGURA 2.3 – Diagrama de Blocos de um Sistema de Controle Digital.
Fonte: CHEN, 1993.
12
O sinal de saída da planta é um sinal continuo no tempo. O sinal de erro é
convertido em um sinal discreto pelo conversor A/D. Esta conversão é realizada
seguindo um período de amostragem pré-determinado de modo a garantir a correta
amostragem do sinal analógico.
Segundo Chen (1993) os sistemas de controle digitais possuem inúmeras
vantagens em relação aos sistemas de controle analógicos, dentre elas:
1. Sinais digitais são codificados em seqüências de 0 e 1, que são em termos
representados por faixas de tensões (por exemplo, 0 para tensões entre 0 e 1V e 1
para tensões entre 2 e 4V). Esta representação é menos susceptível a ruídos
derivados da fonte de alimentação.
2. A precisão de um dispositivo digital pode ser incrementada apenas pelo aumento no
número de bits, ou seja, aumenta-se a resolução do dispositivo. Assim, sistemas
digitais são geralmente mais precisos e confiáveis que sistemas analógicos.
3. Sistemas digitais são mais flexíveis que sistemas analógicos. Se um computador
digital é utilizado, ele pode ser utilizado não apenas como controlador, mas também
como armazenador de dados referentes à dinâmica do sistema.
4. A tecnologia VLSI (Very-Large-Scale Integrated) permitiu uma queda acentuada
no preco dos dispositivos digitais, favorecendo a sua utilização em sistemas de
controle digitais.
13
CAPÍTULO III
III – PLATAFORMA DE INSTRUMENTAÇÃO VIRTUAL
Como descrito no capítulo 1, o controle da temperatura da estufa é realizado
por meio de uma plataforma de instrumentação virtual. A plataforma é composta por
um circuito de medição de temperatura, o software LABVIEW e um circuito de
potência responsável por atuar diretamente na resistência elétrica da estufa. Ainda há
uma placa de aquisição de dados que faz a interface entre os três componentes da
plataforma. Na FIGURA 3.1 exibe-se um diagrama de blocos detalhado do sistema de
controle mencionado. Nas seções seguintes descrevem-se cada um dos componentes da
plataforma em detalhes.
FIGURA 3.1 – Diagrama de blocos do sistema.
3.1 Circuito de Medição
O circuito de medição de temperatura é composto por um termopar tipo K,
sensor de temperatura, utilizado para aferir os valores de temperatura da estufa, e um
instrumento que faz a amplificação do sinal bem como possui a compensação de junta
fria para o termopar em um chip monolítico (AD595) (FIGURA 3.2).
O termopar tipo K é formado por um termoelemento positivo de uma liga
denominada Cromel (Níquel-Cromo) e um termoelemento negativo composto de outra
liga chamada de Alumel (Níquel, Manganês, Silício e Alumínio). A faixa de utilização
deste termopar vai de 0 °C a 1200 °C, gerando uma força eletromotriz (f.e.m) entre 0
mV e 48,89 mV para esta faixa de temperaturas. Este tipo de termopar é recomendado
14
para uso contínuo em atmosferas inertes ou oxidantes, em temperaturas até 1200 °C.
Sua resistência a oxidação faz com que sejam utilizados principalmente em
temperaturas superiores a 0 °C. Podem, eventualmente, ser utilizados para temperaturas
de -250 °C a 0 °C. No entanto, seus limites de erros foram estabelecidos somente para
valores de temperaturas positivas (DOEBELIN, 1990).
O instrumento de amplificação-compensação combina um ponto de
referência com a pré-calibração do amplificador para produzir um nível alto (10 mV/°C)
diretamente na saída do termopar. A saída fornecida pelo AD595 é linear, de modo que
não é necessário a utilização do polinômio de linearização do termopar tipo K.
FIGURA 3.2 – Circuito de Medição
Fonte: MONOLITHIC..., 1999.
O LED (FIGURA 3.2) funciona como um indicador de funcionamento do
circuito de medição. Caso haja alguma falha na medição como, por exemplo,
rompimento ou mau encaixe dos fios do termopar o LED informará que ocorreu algum
erro na medição.
15
3.2 LABVIEW
O LABVIEW é um software que foi desenvolvido pela National
Instruments em 1986 seguindo o conceito de instrumentação virtual. Utilizando o
LABVIEW em aplicações de medições para automação, é possível adquirir dados ao
conectar-se com vários dispositivos de hardware, definir uma aplicação para analisar ou
tomar decisões com base nestes dados e depois apresentar medições por meio de
interfaces gráficas, página Web, arquivos de bancos de dados etc (GETTING..., 2005b).
Os programas desenvolvidos em LABVIEW são chamados instrumentos
virtuais, ou comumente pela sigla em inglês VI’s (Virtual Instruments), porque sua
aparência e operação imitam instrumentos físicos, como osciloscópios e multímetros. O
LABVIEW contém um conjunto detalhado de ferramentas para aquisição, análise,
apresentação, armazenamento de dados, bem como ferramentas de auxílio a problemas
de erros de código ou escrita do programa.
Com o LABVIEW é possível realizar, de uma forma rápida, a aquisição e a
geração de sinais com placas plug-in, dispositivos USB e sistemas com comunicação
Ethernet. Estas capacidades de entrada/saída, combinadas com tipos de dados especiais
e funções de análise de medidas, são especificamente desenhadas para adquirir as
medições necessárias dos sensores físicos tão rápido e fácil quanto possível
(GETTING..., 2005b). Além disso, este software possui funções de análise de sinais,
tais como análise de freqüência, estatística, probabilidade, matemáticas, ajuste de
curvas, interpolação e processamento digital de sinais. O LABVIEW possui também
recursos de apresentação de dados que incluem visualização de dados, relatórios,
armazenamento de dados, publicação na Web e conexão com banco de dados, dentre
outros.
Utilizando o LABVIEW é possível, ainda, construir uma interface de
usuário no Front Panel, com controles e indicadores. Podem-se denominar controles os
botões, chaves seletoras e qualquer outro mecanismo de entrada, ao passo que
indicadores são gráficos, LED’s e qualquer outro tipo de display. Após a construção da
interface do usuário no Front Panel, é necessário adicionar o código utilizando VI’s e
estruturas de controle para que os objetos do painel frontal possam ser controlados. Isto
é feito no Diagram Block
16
O LABVIEW pode ainda ser utilizado para comunicação com dispositivos
de hardware como sistemas de aquisição de dados, visão, dispositivos de controle de
movimento, bem como instrumentos que se comunica por protocolos GPIB (General
Purpose Interface Bus), PXI (Peripheral Component Interconnect eXtensions for
Instrumentation), VXI (Virtual Machine Environment eXtensions for Instrumentation),
RS2321 e RS4852.
3.3 Circuito de Potência
A função do circuito de potência é fornecer a corrente adequada para a
resistência elétrica da estufa de modo que seja dissipada a potência necessária,
aumentando ou diminuindo a temperatura no interior da mesma. Com isso, mantêm-se a
temperatura no interior da estufa próximo ao valor desejado. O controle da corrente
fornecida à resistência é feito por meio da variação da tensão da rede elétrica utilizando
um conversor de potência a Triac.
O circuito de potência foi desenvolvido com base em princípios de
eletrônica analógica e implementado com dispositivos disponíveis no mercado.
3.3.1 Fonte de Tensão Contínua Estabilizada
A fonte de tensão contínua estabilizada funciona como com conversor CACC, consistindo de dois retificadores meia-onda associados em série que formam uma
ponte (ponte de Graetz), sendo que uma leva corrente até a carga e a outra promove o
retorno (MOHAN et al, 2003). A fonte trabalha com a tensão da rede elétrica de 127
VCA e retifica, por meio de um retificador de onda completa, em uma tensão estável de
+15 VCC e -15 VCC (FIGURA 3.3).
______________________________________________________________________
1. RS232 – Padrão de transmissão serial de dados que utiliza dois sinais de controle, RTS (ready to
send) e o CTS (clear to send), para efetuar o controle de fluxo via hardware.
2. RS485 – Padrão de transmissão serial de dados que permite a transmissão de dados em uma linha
balanceada.
17
FIGURA 3.3 – Circuito elétrico da fonte de tensão estabilizada
3.3.2 Circuito Integrado de Controle de Fase (TCA785)
O TCA785 (FIGURA 3.4) é um circuito integrado (CI) de controle de fase
utilizado para controlar tiristores, triacs e transistores. Os pulsos de disparos fornecidos
por este dispositivo podem ser deslocados de um ângulo de fase entre 0° e 180°. Este CI
pode ser utilizado em aplicações que incluem circuitos conversores, controladores de
corrente alternada e controladores trifásicos. Na TABELA 3.1 mostra-se a distribuição
dos pinos com as suas respectivas funções.
TABELA 3.1 – Pinagem do TCA785
Pino
Função
1
Terra
5
Tensão de Sincronismo
6
Tensão de Alimentação (+ 15VCC)
9
Resistência da Rampa
10
Capacitância da Rampa Voltagem de Controle
11
Voltagem de Controle
12
Extensão do Pulso
13
Pulso Longo (+ 15VCC)
14
Output 1
15
Output 2
18
16
Tensão de Alimentação (+ 15VCC)
FONTE: TCA785..., 2004.
FIGURA 3.4 – Circuito elétrico para controle de fase com o TCA785
O sinal de sincronização é obtido por meio de uma resistência ôhmica de
valor alto no pino 5. Um detector de tensão zero avalia este ponto e encaminha-o ao
registrador de sincronização. Este registrador controla o gerador da rampa, o capacitor
C10 que é carregado por uma corrente constante (determinada pelo resistor ligado ao
pino 9) (FIGURA 3.4). A tensão de controle no pino 11 com valores entre 0 VCC e 5
VCC é fornecida pelo algoritmo de controle implementado no LABVIEW. Esta tensão é
comparada com a rampa produzindo pulsos temporizados de -15 VCC a +15 VCC nos
pinos 14 e 15. Observe que as saídas nestes pinos são defasadas de 180° (FIGURA 3.5).
Estes pulsos proporcionam disparos no optoacoplador MOC3020.
19
FIGURA 3.5 – Diagrama de pulsos no TCA785
FONTE: TCA785..., 2004.
3.3.3 Tensão de Sincronismos (TIL111)
Utilizando a freqüência da rede elétrica (60 Hz), o circuito de sincronismo,
mostrado na FIGURA 3.6, fornece pulsos de tensão quadrados para o pino 5 do
TCA785, conforme se exibe na FIGURA 3.5.
FIGURA 3.6 – Circuito de Sincronismo
20
3.3.4 Conversor de Potência a Triac – Optoacoplador MOC3020
O objetivo do optoacoplador é realizar o isolamento entre duas partes do
circuito, o circuito de controle (TCA785) e o circuito conversor de potência (Triac). Os
optoacopladores possuem um LED e um fototransistor no mesmo encapsulamento
(FIGURA 3.7). O LED passa a conduzir quando um sinal chega aos seus terminais.
Desse modo o fototransistor é sensibilizado pela luz emitida pelo LED e, então, começa
a conduzir.
FIGURA 3.7 – Conversor de Potência a Triac
O Triac é uma chave eletrônica de estado solido. A ação de controle,
constituída de uma corrente elétrica, é enviada ao Triac, que tem a função de chavear a
corrente elétrica que alimentara a resistência da estufa promovendo ou não o aumento
da temperatura em seu interior.
Neste caso o termopar mede a temperatura de forma continua e envia ao
computador que processa este sinal e retorna um sinal de controle ao circuito de
controle, mais precisamente ao pino 11 do TCA785. Este por sua vez converte o sinal
de controle em pulsos temporizados que são disparados no gate do Triac e,
conseqüentemente, energiza a resistência elétrica da estufa. Portanto, o elemento final
de controle da planta é controlado por meio de uma saída lógica. Esta controlaria um
“variador de voltagem” que por sua vez energizaria a resistência elétrica, alternando a
potência da mesma até um valor desejado de temperatura.
21
3.4 Placa de aquisição de dados
O dispositivo de hardware utilizado neste trabalho para efetuar a aquisição
dos valores de temperatura é uma placa de aquisição de dados modelo NI USB-6009, da
National Instruments (NI USB-6008/6009..., 2006a).
Esta placa de aquisição possui conexões para oito canais de entradas
analógicas (AI), dois canais de saídas analógicas (AO), 12 canais de entradas/saídas
digitais (DIO) e um contador de 32 bits com interface USB full-speed (FIGURA 3.8).
Além disso, a taxa de amostragem de 48 kS/s.
FIGURA 3.8 – Placa de Aquisição de Dados NI USB-6009
Fonte: NI USB-6008/6009…, 2006a.
A placa de aquisição possui um bloco de conectores destacáveis para as
entradas analógicas e outro bloco de conectores, também destacáveis, para as entradas
digitais (TABELA 3.2).
22
TABELA 3.2 – Terminais de entradas analógicas e digitais.
Fonte: NI USB-6008/6009…, 2006a.
3.4.1 Circuito de Entrada Analógica
Os sinais analógicos são lidos pelas entradas analógicas da placa de
aquisição, cujo circuito mostra-se na FIGURA 3.9.
Como se pode notar, o circuito de entrada analógica possui um
multiplexador que lê cada entrada por vez. Além disso, possui também um amplificador
de ganho programável que provê ganhos na entrada com valores de 1, 2, 4, 5, 8, 10, 16
ou 20 quando a entrada está configurada para o modo diferencial e ganho 1 quando a
entrada está configurada para o modo RSE (Reference Single-Ended).
23
FIGURA 3.9 – Circuito de entrada analógica.
Fonte: NI USB-6008/6009…, 2006a.
O circuito de entrada analógica possui ainda um conversor A/D e um buffer
first-in first-out (AI FIFO). O primeiro converte os sinais analógicos de tensão em um
código binário, ao passo que o segundo assegura que nenhum dado seja perdido na
conversão.
3.4.2 Circuito de Saída Analógica
Os canais de saída analógicas podem gerar sinais de 0 a 5V e possuem um
conversor D/A que converte os códigos binários em sinais analógicos de tensão, além
de um buffer (FIGURA 3.10).
FIGURA 3.10 – Circuito de saída analógica.
Fonte: NI USB-6008/6009…, 2006a.
24
3.4.3 Modos de Medir as Entradas Analógicas
O modelo de placa de aquisição NI USB-6009 possui dois modos de entrada
analógica diferentes: diferencial e RSE.
No modo diferencial, a ligação positiva é conectada ao terminal positivo da
entrada analógica, ao passo que a ligação negativa é conectada ao terminal negativo da
entrada. Utilizando este modo pode-se medir sinais de ± 20 V numa faixa de ± 20 V.
Entretanto, a máxima tensão permitida em cada terminal de entrada é de ± 10 V em
relação ao GND (Ground). Operando neste modo a resolução das entradas é de 14 bits.
Na FIGURA 3.11 mostra-se o modo de conexão diferencial para entradas analógicas.
FIGURA 3.11 – Modo de conexão diferencial.
Fonte: NI USB-6008/6009…, 2006a.
No modo de conexão RSE a ligação positiva deve ser conectada a um dos
terminais de entradas analógicas e a ligação negativa ao terminal GND (FIGURA 3.12)
e a resolução das entradas atinge 13 bits.
FIGURA 3.12 – Modo de conexão RSE.
Fonte: NI USB-6008/6009…, 2006a.
25
CAPÍTULO IV
IV – PROJETO DO SISTEMA DE CONTROLE
4.1 Identificação da Função de Transferência do Processo
A identificação de sistemas é utilizada para obter um modelo matemático
que explique, pelo menos em parte e de forma aproximada, a relação de causa e efeito
presente nos dados. Dados os sinais de entrada u(k) e os sinais de saída y(k) de um
sistema real qualquer, é possível estimar os parâmetros do modelo matemático que mais
se aproxima da realidade para o sistema em questão.
Segundo Aguirre (2004), as principais etapas num problema de
identificação são:
1. Testes dinâmicos e coleta de dados: uma vez que a identificação de sistemas se
propõe a obter modelos a partir de dados, é necessário gerar tais dados. Os
problemas importantes desta etapa são a escolha dos sinais de excitação, a execução
do teste e a escolha do tempo de amostragem.
2. Escolha da representação matemática a ser usada.
3. Determinação da estrutura do modelo: no caso de modelos lineares, a escolha da
estrutura se restringe, basicamente, à escolha do número de pólos e de zeros, bem
como a determinação do atraso puro de tempo.
4. Estimação de parâmetros: essa etapa se inicia com a escolha do algoritmo a ser
utilizado.
5. Validação do modelo: tendo obtido uma família de modelos, é necessário verificar
se eles incorporam ou não as características de interesse do sistema original. Além
disso, é interessante poder comparar os modelos entre si e decidir se há algum
candidato significativamente melhor que os demais.
Certamente, vários aspectos da identificação de um sistema real envolvem
decisões e escolhas subjetivas. Nas seções que se seguem neste capitulo são mostrados
os passos que fazem parte da identificação do modelo matemático que rege o
comportamento dinâmico da estufa a qual se quer controlar a temperatura.
26
4.1.1
Escolha e Coleta de Sinais
Alguns aspectos devem ser considerados importantes na identificação de
sistemas: onde excitar a planta, os tipos de sinais a serem utilizados para obter os dados
que representem a dinâmica da planta e a maneira de amostrar tais dados (AGUIRRE,
2004).
4.1.1.1 Escolha da Variável de Entrada e de Saída
Ao se buscar um modelo matemático que relacione dinamicamente duas
variáveis de um sistema, parte-se do pressuposto de que há correlação significativa entre
as variáveis que justifique o modelo. Obviamente, se não houver nenhuma relação de
causa e efeito entre duas variáveis, a busca de um modelo que as relacione torna-se
injustificada. Outro pressuposto comum ao se escolher variáveis y (k ) e u (k ) como
saída e entrada de um modelo, respectivamente, é que o sinal u (k ) é, na realidade, uma
causa de y (k ) .
Neste trabalho, o sistema em questão é um sistema linear e invariante no
tempo. Portanto, tem-se uma saída que é afetada por apenas uma entrada.
No caso de uma malha de controle, a variável de entrada da estufa, também
chamada de variável manipulada, é a variável de saída do controlador, conforme
mostrado na FIGURA 3.1. Tem-se ainda que a variável de saída, ou variável controlada,
é a variável de saída da estufa.
O controlador implementado no LABVIEW fornece um sinal de tensão ao
circuito de potência para que este acione a resistência. Desta forma, se pode definir
como a variável manipulada a Tensão de Saída fornecida pelo controlador. A variável
controlada é facilmente identificável. Já que se trata de um controle de temperatura, esta
é definida como a variável controlada.
27
4.1.1.2 Escolha dos Sinais de Excitação
Os sinais de excitação que geralmente são utilizados são funções degrau,
rampa, parábola de aceleração, impulso, senoidais e outros. Com esses sinais de
excitação, tanto a análise experimental como a análise matemática dos sistemas de
controle podem ser obtidas facilmente, uma vez que esses sinais são funções de tempo
muito simples.
Pode-se determinar quais desses sinais típicos de entrada devem ser
utilizados na análise das características do sistema, pelo comportamento da entrada a
que o sistema será submetido, com maior freqüência, sob condições normais de
operação. Se as entradas de um sistema de controle são funções de tempo que variam
gradualmente, então a rampa em função do tempo pode ser um bom sinal de excitação.
Da mesma maneira, se um sistema estiver sujeito a variações bruscas de entrada, a
função degrau poderá ser um bom sinal de excitação; e se o sistema estiver sujeito a
entradas de impacto, uma função impulso poderá ser a melhor opção (OGATA, 2003).
Para o processo em questão utilizou-se como sinal de excitação a função
degrau, tendo em vista que a variável manipulada é um sinal de tensão e de resposta
rápida, caracterizando, portanto, um sinal de entrada com variações bruscas.
Para verificar o comportamento do sistema e realizar a coleta de dados
aplicou-se uma entrada do tipo degrau com uma variação de 2V. A curva de resposta do
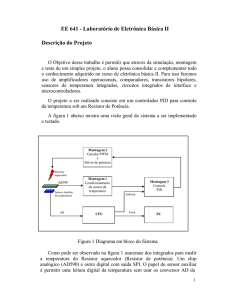
sistema é mostrada nas FIGURA 4.1, 4.2 e 4.3.
250
Temperatura (°C)
200
150
100
50
0
0
1000
2000
3000
4000
0
1000
2000
3000
4000
5000
6000
7000
8000
9000
5000
6000
7000
8000
9000
Tensão de Controle (V)
2.5
2
1.5
1
0.5
0
Tempo (s)
FIGURA 4.1 – Curvas Entrada Degrau x Resposta do Sistema para o primeiro conjunto de dados.
28
250
Temperatura (°C)
200
150
100
50
0
0
1000
2000
3000
4000
0
1000
2000
3000
4000
5000
6000
7000
8000
9000
5000
6000
7000
8000
9000
2.5
Tensão de Controle (V)
2
1.5
1
0.5
0
Tempo (s)
FIGURA 4.2 – Curvas Entrada Degrau x Resposta do Sistema para o segundo conjunto de dados.
250
Temperatura (°C)
200
150
100
50
0
0
1000
2000
3000
4000
0
1000
2000
3000
4000
5000
6000
7000
8000
9000
5000
6000
7000
8000
9000
Tensão de Controle (V)
2.5
2
1.5
1
0.5
0
Tempo (s)
FIGURA 4.3 – Curvas Entrada Degrau x Resposta do Sistema para o terceiro conjunto de dados.
Pode-se classificar as malhas de acordo com a sua velocidade de resposta
(atraso puro de tempo) seguindo o seguinte critério:
1. Uma malha rápida possui um tempo de resposta variando de menos de um segundo
até cerca de 10 segundos;
2. Uma malha de velocidade media possui tempo de resposta entre 10 e 30 segundos;
3. Uma malha lenta possui tempo de resposta de mais de 30 segundos.
Sabe-se previamente que o sistema possui uma dinâmica lenta, ou seja, um
tempo de resposta superior a 30 segundos. Desta forma optou-se por escolher um
29
período de amostragem de 1 segundo, já que este valor seria o suficiente para realizar as
amostragens necessárias e obter os valores de temperatura ao longo do tempo. Além
disso, verifica-se pela curva de resposta do sistema que o tempo necessário para atingir
o regime estacionário é superior a 8000 segundos.
4.1.2
Modelo Determinístico
Os modelos determinísticos não dão nenhum tratamento especial ao ruído
presente nos dados. São pouco imunes a ruído e só apresentam bons resultados se a
relação sinal/ruído for suficientemente alta.
A solução típica deste tipo de sistema é mostrada na FIGURA 4.4.
FIGURA 4.4 – Resposta do processo de primeira ordem a uma Entrada Degrau
Processos que não possuem integradores nem pólos ressonantes,
geralmente, podem ser aproximados por modelos determinísticos de primeira ordem,
conforme a equação (4.1), onde Y (S ) representa a saída do sistema (variável
controlada) e U (S ) a entrada da planta.
30
Y (S )
K − AS
= G (S ) =
e
U (S )
τS + 1
(4.1)
Três termos são importantes para o modelo apresentado na equação (4.1):
1. Ganho do Processo ( K ): expressa quanto se altera a variável de saída para cada
unidade de variação da variável de entrada. E conhecido também como ganho
estático do sistema;
2. Tempo Morto ( A ): e o tempo que o processo leva para começar a responder a
variação em degrau;
3. Tempo de Primeira Ordem ( τ ): e o tempo que o processo demora, uma vez iniciada
a variação, para chegar aos 63,2% da variação total final. Esse numero e
conseqüência de uma exponencial que aparece na solução analítica da equação
diferencial.
O modelo representado na equação (4.1) e uma representação algébrica da
relação dinâmica entre a entrada e a saída do processo. Esta é uma forma padronizada
de representação de processos de primeira ordem. O pólo da função de transferência
1
− é real e negativo.
τ
4.1.3 Estimação dos Parâmetros do Modelo do Processo
De acordo com as curvas de resposta do sistema (FIGURAS 4.1, 4.2 e 4.3)
pode-se observar que o mesmo possui um comportamento de um sistema de primeira
ordem que pode ser aproximado pela equação (4.1). A estimação dos parâmetros do
modelo foi realizada, então, de forma a obter um modelo de primeira ordem que se
ajustasse a curva obtida nos experimentos.
Foram feitos testes com três conjuntos de dados, e os respectivos modelos
de primeira ordem obtidos a partir da estimação dos parâmetros considerando os dados
utilizados. Para tal objetivo utilizou-se o toolbox de Identificação de Sistemas do
software MATLAB (System Identification Tool). Nas FIGURAS 4.5, 4.6 e 4.7
mostram-se as curvas experimentais e as curvas aproximadas obtidas.
31
250
Temperatura (°C)
200
150
100
50
Curva Experimental
Curva Ajustada
0
0
1000
2000
3000
4000
5000
6000
7000
8000
9000
Tempo (s)
FIGURA 4.5 – Curva aproximada para o primeiro conjunto de dados.
250
Temperatura (C)
200
150
100
50
Curva Experimental
Curva Ajustada
0
0
1000
2000
3000
4000
5000
6000
7000
8000
Tempo (s)
FIGURA 4.6 – Curva aproximada para o segundo conjunto de dados.
9000
32
250
Temperatura (°C)
200
150
100
50
Curva Experimental
Curva Ajustada
0
0
1000
2000
3000
4000
5000
6000
7000
8000
9000
Tempo (s)
FIGURA 4.7 – Curva aproximada para o terceiro conjunto de dados.
A estimação dos parâmetros por um modelo determinístico de primeira
ordem fez com que as curvas fossem aproximadas em 89,95%, 89,63% e 89,43% das
curvas experimentais mostradas nas FIGURAS 4.5, 4.6 e 4.7.
O critério utilizado para escolher qual o melhor modelo foi a utilização do
Critério de Informação de Akaike (AIC) dado por:
[
]
2
(ηθ ) + 2ηθ
AIC (ηθ ) = N ln σ erro
(4.2)
2
onde N é o numero de dados, σ erro
(ηθ ) é a variância do erro de modelagem (erro de
predição de um passo a frente ou resíduos) e ηθ = dim[θ ] é o numero de parâmetros do
modelo (AGUIRRE, 2004).
A utilização de critérios de informação pressupõe que existe uma ordem
predefinida para incluir os termos candidatos seqüencialmente no modelo.
Os valores AIC calculados bem como os modelos obtidos e a variância dos
erros de modelagem são apresentados na TABELA 4.1.
TABELA 4.1 – Valores AIC para cada modelo obtido
33
Conjunto
Modelo Obtido ( y (k ) )
2
σ erro
(ηθ )
AIC
Primeiro
72,997
e −40, 277 S
3256,9S + 1
8,87547
2,1840
Segundo
72,933
e −115,35S
3036,2S + 1
10,5287
2,3548
Terceiro
73,24
e −40,131S
3195,3S + 1
10,3417
2,3369
de Dados
O índice AIC normalmente atinge um mínimo para um determinado número
de parâmetros no modelo. Do ponto de vista do critério usado, esse número de
parâmetros é ótimo. Deve-se lembrar que o Critério de Informação de Akaike é
fundamentalmente estatístico e não garante necessariamente que o modelo com o
número “ótimo” de termos seja um modelo válido.
Adotou-se como modelo do processo aquele que exibiu o menor valor para
o Critério de Informação de Akaike. Portanto, o modelo adotado foi o modelo obtido
com a inclusão do ruído no primeiro conjunto de dados, ou seja,
G (S ) =
72,997
e −40, 277 S
3256,9S + 1
(4.3)
onde o ganho estático é de 72,997 °C/V, a constate de tempo igual a 3256,9 segundos e
o atraso puro de tempo 40,277 segundos. Conforme visto na seção 4.1 pode-se verificar
que o sistema possui, de fato, uma dinâmica lenta.
Vale ressaltar que podem existir modelos de ordem superior que atendem
perfeitamente ao processo em questão. Porém, neste caso um modelo de primeira ordem
satisfaz os requisitos da dinâmica do sistema, conforme já foi analisado anteriormente.
4.1.4 Validação do Modelo Obtido
Após passar pelas diversas etapas que compõem a identificação de um
sistema real chega-se ao produto final, um modelo ou uma família de modelos. A
34
pergunta que se faz neste momento é se o modelo obtido realmente atende aos
propósitos para que foi obtido. Na realidade, será difícil obter respostas absolutas para
tais questões sendo que normalmente as respostas terão um caráter relativo, ou seja,
deverá ser interpretado dentro de um determinado contexto.
Em problemas de validação, a questão chave é tentar determinar se um dado
modelo obtido é válido ou não. O modelo provavelmente é representativo e válido se
incorporar aquelas características do sistema que são fundamentais para a aplicação em
questão.
Na prática é recomendável utilizar diversas ferramentas e tentar validar um
modelo considerando um conjunto de indicadores em vez de usar um indicador só.
Além disso, nem todos os métodos são aplicáveis sempre. Finalmente, na prática, um
modelo será valido na medida em que for realmente útil (AGUIRRE, 2004).
Comparar a simulação do modelo obtido com os dados medidos é
provavelmente a forma mais usual de se validar um modelo. Nesse caso, deseja-se saber
se o modelo reproduz ao longo do tempo os dados observados.
Um cuidado básico é não usar na validação os dados utilizados para obter o
modelo. Isto se deve ao fato de que se deseja saber o quão geral é o modelo, ou seja,
deseja-se saber se o modelo serve para explicar um outro conjunto de dados observado
do mesmo sistema. É comum, portanto, referir-se a capacidade de generalização do
modelo.
Na prática, o ideal é efetuarem-se dois testes independentes ao longo dos
quais o sistema é observado gerando-se, assim, dois conjuntos de dados. Um deles é
usado para a identificação do modelo e outro para a validação. Ao se proceder desta
formam alguns cuidados precisam ser tomados. Em primeiro lugar, como praticamente
todos os sistemas reais são não-lineares, é importante que os dois testes sejam
realizados com o sistema operando em condições semelhantes. Se o conjunto de dados
for coletado com o sistema operando em condições distintas, então a dinâmica do
sistema provavelmente será diferente, e nesse caso, revelará diferenças com relação às
observações quando for validado.
Seguindo estes princípios, os três testes foram realizados para a coleta de
dados com condições semelhantes de operação, obtendo-se três conjuntos de dados,
conforme mostrado anteriormente. O modelo foi obtido a partir do primeiro conjunto de
dados. Para a validação do modelo, portanto, utilizou-se um dos outros conjuntos de
35
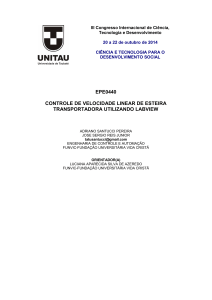
dados. Neste caso, optou-se pelo segundo conjunto de dados. Na FIGURA 4.8 exibe-se
a curva aproximada para este conjunto de dados após a validação do modelo. Obteve-se
uma aproximação de 88,58%.
250
Temperatura (°C)
200
150
100
50
Curva Experimental
Curva Ajustada
0
0
1000
2000
3000
4000
5000
6000
7000
8000
9000
Tempo (s)
FIGURA 4.8 – Curva de validação do modelo obtido
Além da validação efetuada com o segundo conjunto de dados, foi realizada
uma simulação com o modelo obtido, seguindo as condições iniciais do segundo
conjunto de dados. Na FIGURA 4.9 exibe-se o gráfico da reposta obtida. Observa-se
que está de acordo com o conjunto de dados obtidos.
250
Resposta do modelo as condicoes iniciais
200
Am plitude
150
100
50
0
0
1000
2000
3000
4000
tempo (sec)
5000
6000
7000
FIGURA 4.9 – Simulação do modelo obtido com condições iniciais
4.2 Projeto do Controlador
8000
9000
36
A definição da estratégia de controle consiste, basicamente, na escolha da
variável manipulada x controlada mais efetiva para se atingir os objetivos do sistema de
controle. Definiu-se como variável manipulada a tensão de controle que é a variável de
saída do controlador e definiu-se, ainda, variável controlada a temperatura da estufa.
Vale ressaltar que a temperatura da estufa está relacionada apenas com a
tensão aplicada à resistência elétrica de aquecimento da estufa, constituindo, portanto,
um sistema de uma entrada e uma saída (SISO – Single Ended Single Output).
A estratégia a ser adotada é o projeto de um controlador PID. A técnica de
controle PID consiste em calcular um valor de atuação sobre o processo a partir de
informações do valor desejado e do valor atual da variável do processo. Este valor de
atuação sobre o processo é transformado em um sinal adequado ao atuador utilizado e
deve garantir um controle estável e preciso.
De uma maneira bem simples, o PID e a composição de três ações de
controle estão resumidas na TABELA 4.2.
TABELA 4.2 – Composição do controle PID
A correção a ser aplicada ao processo
P
Correção ao erro proporcional
deve crescer na proporção que cresce o
erro entre o valor real e o desejado.
I
D
Correção proporcional ao produto Erro
x Tempo
Correção proporcional a taxa de
variação do erro
Erros pequenos, mas que existem há
muito tempo requer correção mais
intensa
Se o erro esta variando muito rápido,
esta taxa de variação deve ser reduzida
para evitar oscilações
A equação para um controlador PID, no domínio do tempo é apresentada a
na equação (4.4):
dE (t )
g C (t ) = k P E (t ) + k i ∫ E (t )dt + k d
dt
ou, no domínio de Laplace
(4.4)
37
1
GC (S ) = k P 1 +
+ TD S
Ti S
(4.5)
onde k P é o ganho proporcional, Ti é o tempo integral e TD o tempo derivativo. A
equação do controlador PID pode, também, ser apresentada na forma
GC (S ) = k P +
ki
+ kd S
S
(4.6)
na qual k i é o ganho integral e k d é o ganho derivativo do sistema.
4.2.1
Ação de Controle Proporcional
No controle proporcional, o valor da variável manipulada é proporcional ao
sinal de erro atuante, conforme a equação (4.7).
g C (t ) = k P E (t )
(4.7)
Para que o sinal de erro atuante seja nulo, é necessário que o valor da
variável manipulada seja igual ao valor de referência (setpoint).
Quando a condição desejada, ou seja, valor da variável manipulada é igual
ao setpoint, nenhuma energia é entregue ao processo, o que faz com que volte a surgir
um sinal de erro. Por causa disto, um controle puramente proporcional nunca consegue
atingir a condição desejada. Muitos controladores que operam apenas no modo
proporcional adicionam um valor constante à variável manipulada para garantir que na
condição desejada alguma energia seja entregue ao sistema. Este valor é denominado
bias (polarização) e quando ajustável permite que se obtenha uma estabilização próxima
da condição desejada.
38
4.2.2
Ação de Controle Integral
A ação de controle integral não é, isoladamente, uma técnica de controle,
pois não pode ser empregado sem uma ação de controle proporcional. A ação integral
consiste em uma resposta na saída do controlador que é proporcional a amplitude e
duração do sinal de erro atuante. A ação integral tem o efeito de eliminar o erro
característico de um controle puramente proporcional.
A ação integral funciona da seguinte maneira: em intervalos regulares, a
ação integral corrige o valor da variável manipulada, somando a esta o valor do erro
atuante. Este intervalo de tempo é o tempo integral ( Ti ).
Na equação (4.8) descreve-se matematicamente uma ação de controle
integral.
[
g C (t ) = k P E (t ) + k i ∫ E (t )dt
]
(4.8)
A ação de controle integral, embora remova o erro residual ou o erro
estacionário, pode conduzir a uma resposta oscilatória com uma amplitude que decresce
lentamente ou mesmo uma amplitude sempre crescente, ambas em geral indesejáveis
(OGATA, 2003).
4.2.3
Ação de Controle Derivativo
Assim como o controle integral, o controle derivativo não é, isoladamente,
uma técnica de controle, pois não é empregado sem o acompanhamento de uma ação de
controle proporcional. A ação de controle derivativa consiste em uma resposta na saída
do controlador que é proporcional a velocidade de variação do erro atuante, conforme se
descreve na equação (4.9).
dE (t )
g C (t ) = k P E (t ) + k d
dt
(4.9)
39
A ação derivativa tem o efeito de reduzir a velocidade das variações do
valor da variável controlada, evitando que ela se eleve ou reduza muito rapidamente.
O termo derivativo só atua quando há variação no erro. Se o processo esta
estável, seu efeito é nulo. Durante perturbações ou na partida do processo, quando o
erro está variando, o derivativo sempre atua no sentido de atenuar as variações, sendo,
portanto, a sua principal função melhorar o desempenho do processo em regime
transitório.
Embora o controle derivativo não afete diretamente o erro estacionário, ele
aumenta o amortecimento do sistema, permitindo, assim, a utilização de um valor mais
elevado do ganho K , o que vai resultar em maior precisão de regime permanente
(OGATA, 2003).
4.2.4
Sintonia de Controladores PID
O modelo apresentado na equação (4.1), apesar de simples e impreciso, é
suficiente para sintonizar grande parte dos controladores PID utilizados na indústria. O
primeiro passo para a sintonia é a obtenção do modelo para o sistema em estudo.
Se um modelo matemático do sistema pode ser obtido, então é possível
aplicar várias técnicas de projeto na determinação dos parâmetros do controlador que
vão impor as especificações de regime transitório e do regime permanente do sistema de
malha fechada. Na FIGURA 4.9 mostra-se o controle PID do processo em estudo.
O processo de selecionar parâmetros do controlador que garantam uma dada
especificação de desempenho é conhecido como sintonia do controlador.
Setpoint +
-
1
k P 1 +
+ Td S
Ti S
Tensão de
controle
72,997
e −40, 277 S
3256,9S + 1
FIGURA 4.9 – Controle PID do Processo
Temperatura
40
Na TABELA 4.3 apresenta-se o tipo de controlador recomendado de acordo
com a velocidade de resposta da malha fechada de um sistema de controle de
temperatura.
TABELA 4.3 – Controlador recomendado em função do tempo de resposta da malha
Dinâmica da malha
Tempo de resposta em segundos (
A)
Controlador recomendado
Rápida
0 < A ≤ 10s
PI
Media
10 < A ≤ 30s
PI ou PID
Lenta
A > 30s
PID
4.2.4.1 Método de Ziegler-Nichols para Sintonia de Controladores PID
Ziegler e Nichols sugeriram regras para a sintonia de controladores PID
baseadas na resposta experimental ao degrau ou no valor de k P que resulta em uma
estabilidade marginal, quando somente uma ação proporcional é utilizada. As regras
sugerem um conjunto de valores k P , Ti , Td que vão proporcionar uma operação estável
ao sistema. Contudo, o sistema resultante pode exibir um máximo sobre-sinal grande
devido à resposta ao degrau, o que e inaceitável. Nesse caso, e necessário fazer uma
série de sintonias finas até que um resultado aceitável seja obtido. De fato, as regras de
Ziegler-Nichols fornecem estimativas dos valores dos parâmetros e proporcionam um
ponto de partida na sintonia fina, e não os valores definitivos de k P , Ti , Td logo na
primeira tentativa (OGATA, 2003).
Ziegler e Nichols propuseram dois métodos para a sintonia de controladores
PID. O primeiro método é baseado em um processo de malha aberta, ao passo que o
segundo método é baseado no ganho crítico da malha fechada. O método de sintonia em
malha aberta é muito utilizado para sistemas de primeira ordem e seus parâmetros são
obtidos como mostrado na FIGURA 4.10.
41
FIGURA 4.10 – Modelo para obtenção de parâmetros de primeira ordem
A curva com o formato em S pode ser caracterizada por duas constantes, o
atraso A e a constante de tempo τ . Ziegler e Nichols sugeriram escolher os valores de
k P , Ti , Td de acordo com as fórmulas que aparecem na TABELA 4.4.
TABELA 4.4 – Regra de sintonia de Ziegler-Nichols baseada na resposta ao degrau da planta (primeiro
método)
Tipo de
kP
Ti
Td
P
1
RA
∞
0
PI
0,9
RA
0,27
RA2
0
Controlador
42
PID
1,2
RA
2A
0,5 A
Fonte: Engenharia de..., 2003.
Considerando os dados apresentados nas TABELA 4.3 e 4.4, tem-se que a
equação do controlador PID para o processo é:
1
GC = 1,3291 +
+ 20,138S
80,554S
(4.10)
Na FIGURA 4.11 mostra-se o diagrama de blocos do sistema em malha
fechada incluindo a função de transferência do controlador.
Setpoint +
-
1
1,3291 +
+ 20,138S
80,554 S
72,997
e −40, 277 S
3256,9S + 1
Temperatura
FIGURA 4.11 – Diagrama de Blocos do Sistema de Controle
4.2.4.2 Precisão em Regime Estacionário
Todo sistema físico real por mais preciso que seja possui um erro de regime
estacionário. O erro de regime estacionário e, por definição, o valor em regime
estacionário de e(t ) . Representando esse erro por eSS e admitindo que o sensor possui
ganho unitário ( H (S ) = 1 ), então pelo teorema do valor final da transformada de
Laplace
eSS = lim SE (S )
S →0
(4.11)
43
contanto que e(t ) tenha um valor final. Tem-se, ainda que
E (S ) =
R (S )
1 + GC (S )G (S )
(4.12)
de onde
SR (S )
S →0 1 + G (S )G (S )
C
eSS = lim
(4.13)
Para uma entrada de degrau podemos calcular o erro em regime estacionário
por
S
A
⋅
S →0 1 + G (S )G (S ) S
C
eSS = lim
(4.14)
onde A é a amplitude do degrau aplicado a entrada. Para um degrau de 115°C (diferença
entre o valor do setpoint aplicado e a temperatura inicial) e substituindo-se as
respectivas funções de transferência na equação (4.14), tem-se que o erro em regime
estacionário é 0,0004031°C. No entanto, este erro e teórico. O erro real será mostrado
mais a frente quando se analisar o erro de estabilização da temperatura eS .
CAPÍTULO V
V – AVALIAÇÃO EXPERIMENTAL DO CONTROLADOR
A tarefa de avaliação do desempenho de um controlador e realizada na
pratica por meio de critérios subjetivos. A avaliação assim realizada fundamenta-se em
bases experimentais sendo muito dependente da experiência de quem projetou o
controlador. Dessa forma, as avaliações sobre o desempenho de controladores variam de
acordo com o interesse e a função de quem está avaliando. Por exemplo, na opinião de
um engenheiro de controle é mais importante manter a variável controlada no nível de
referência pré-estabelecido em detrimento da economia de energia. Por outro lado, para
um administrador de uma usina, por exemplo, o segundo aspecto e geralmente mais
44
importante que o primeiro. Portanto, e necessário definir um critério múltiplo que
considere aspectos importantes para cada tipo de avaliador de modo a fornecer um
índice global de avaliação.
Para a implementação do controlador PID foi desenvolvido um algoritmo
em linguagem gráfica no LABVIEW. Este algoritmo e apresentado na FIGURA 6.1.
FIGURA 5.1 – Algoritmo de controle implementado no LABVIEW
A temperatura da estufa é amostrada pelo termopar. O sinal e repassado ao
circuito de medição que lineariza e fornece a placa de aquisição de dados um sinal de
tensão de 10 mV/C. Este sinal e multiplicado por 100 e serve de entrada realimentada
para o bloco PID. O valor do setpoint e definido pelo usuário na interface gráfica bem
como os valores k P , Ti , e Td do PID. O sinal de erro resultante serve como entrada
para o PID que processa este sinal e gera em sua saída o sinal da Tensão de Controle
que e repassada da placa de aquisição ao TCA785 no circuito de potencia. Os valores de
temperatura do setpoint e o valor de temperatura da estufa são armazenados de forma
que possibilite analises futuras. Isto e feito pelo bloco Write to Measurement File. A
explicação detalhada sobre cada bloco encontra-se no ANEXO A.
Qualitativamente, o desempenho de um controlador pode ser avaliado pela
sua capacidade de manter a variável controlada próximo ao valor desejado (setpoint),
mesmo em presença de perturbações externas. No entanto, em aplicações praticas pode
45
ser desejável medir o desempenho de um controlador por meio de um índice que
permite buscar melhoras de desempenho.
Na FIGURA 6.2 exibe-se a resposta para o controlador proposto dado um
setpoint de 150 C.
250
Temperatura da Estufa
Temperatura Desejada
200
Temperatura (°C)
150
100
50
0
0
500
1000
1500
2000
2500
3000
3500
4000
4500
Tempo (s)
FIGURA 5.2 – Resposta do Controlador ao Setpoint
Alguns índices sugeridos na literatura e na prática são propostos. Em geral,
eles consideram a resposta do controlador a uma entrada degrau. O mais interessante
para o sistema será a velocidade de resposta, definida como tempo necessário para
atingir o setpoint, não necessariamente se estabilizando no setpoint.
Foi analisado ainda o erro de estabilização da temperatura
velocidade de resposta (t r ) (TABELA 6.1).
TABELA 5.1 – Análise de desempenho do controlador
Método
t r (s)
eSS (C)
eS (C)
Ziegler-Nichols
2636
0,0004031
1,3935
(eS ) ,
a
46
Como se verifica pelas respostas mostradas na TABELA 6.1, o erro de
estabilização da temperatura é maior, como se esperava. Na FIGURA 6.3 mostra-se a
variação do erro para o setpoint 150 C. Nota-se que o erro em regime permanente não se
anula, permanecendo em um valor próximo a zero.
250
200
Variação do Erro (°C)
150
100
50
0
0
500
1000
1500
2000
2500
3000
3500
4000
4500
Tempo (s)
FIGURA 5.3 – Variação do Erro para o Setpoint proposto
CAPÍTULO VI
VI - CONCLUSÃO
Neste trabalho utilizou-se uma plataforma de instrumentação virtual para a
realização do controle de temperatura da estufa. A utilização de uma placa de aquisição
de dados possibilitou a aquisição e o controle do sistema de forma satisfatória. A
interface gráfica construída no LABVIEW permitiu a visualização em tempo real do
comportamento do sistema quando se quer uma determinada temperatura. Alem disso, a
interface permite que o usuário altere os parâmetros do controlador, possibilitando uma
sintonia fina e a obtenção de uma melhoria na resposta do sistema.
O modelo da planta foi aproximado por um modelo determinístico de
primeira ordem, no qual se determinou o ganho estático, o atraso puro de tempo e a
47
constante de tempo do sistema. Poder-se-ia obter modelos mais precisos de ordem
superior. No entanto, um modelo de primeira ordem atendeu as necessidades de projeto.
O projeto do controlador PID seguindo o método de malha aberta (primeiro
método) de Ziegler-Nichols produziu resultados satisfatórios, conforme os índices
analisados anteriormente. O ensaio pode avaliar a eficiência do controlador, já que o
sistema se comportou dentro de padrões aceitáveis, ou seja, conseguiu manter a
temperatura muito próxima do setpoint.
REFERÊNCIAS BIBLIOGRÁFICAS
AGUIRRE, L. A. Introdução à Identificação de Sistemas: Técnicas Lineares e NãoLineares Aplicadas a Sistemas Reais. 2º ed. rev. e ampl. – Belo Horizonte: Editora
UFMG. 2004.
ANALOG DEVICES, Monolithic Thermocouple Amplifiers with Cold Junction
Compensation, Analog Devices, Inc., 1999.
CHEN, C. T. Analog and Digital Control System Design: Transfer-Function, StateSpace, and Algebraic Methods. 4º Edição. United States of America: Oxford
University Press, 1993.
DOEBELIN, E. O. Measurement Systems: Application and Design. 4º Edição.
Singapore: McGraw-Hill, 1990.
48
DORF, R. C.; BISHOP, R. H. Modern Control Systems. 10º Edição. United States of
America: Pearson Prentice Hall, 2005.
FAIRCHILD Semiconductor Group, TIL111 Photodarlington
Datasheet, Fairchild Semiconductor Corporation, 2000.
Optocouplers
KOGLER JR., J. E. Instrumentação Virtual, 2004. Disponível em:
<http://www.lps.usp.br/lps/arquivos/conteudo/grad/dwnld/Inst.Virtual_apost1.pdf>.
Acesso em 08 jun. 2007
NATIONAL Instruments, NI_DAQmx for USB Getting Started Guide, National
Instruments Corporation, 2006b.
NATIONAL Instruments, Getting Started Guide with LABVIEW, National
Instruments Corporation, 2005b.
NATIONAL Instruments, NI USB-6008/6009 User Guide and Specifications,
National Instruments Corporation, 2006a.
NATIONAL Instruments, Introduction to LABVIEW, National Instruments
Corporation, 2005a. Disponível em: <http://www.ni.com/swf/presentation/pt/aap/>.
Acesso em 10 jun. 2007.
MOHAN, N.; UNDELAND, T. M..; ROBBINS, W. Power Electronics. 3° Edição.
United States of America: John Wiley & Sons, 2003.
OGATA, K. Engenharia de Controle Moderno. 4º Edição. São Paulo: Prentice Hall,
2003.
PHILLIPS, C. L.; HARBOR, R. D. Sistemas de Controle e Realimentação. 2º Edição.
São Paulo: Makron Books, 1996.
49
50
ANEXOS
ANEXO A
Bloco PID - Parâmetros de Controle do Bloco:
Output range: defini os valores máximo e mínimos para a saída do
controlador.
Setpoint: valor desejado da variável controlada.
Process variable: entrada do bloco destinada à variável controlada.
É o valor de realimentação do diagrama de blocos.
PID gains: entrada para o ganho proporcional, tempo integral e
tempo derivativo.
Output: valor de saída do bloco PID.
51
DAQ Assistant:
Cria, edita e executa tarefas utilizando NI-DAQmx. Neste bloco
pode-se configurar todos os parâmetros da aquisição de dados:
•
•
•
•
•
•
Tipo do Sinal: analógico ou digital;
Variável de aquisição: tensão, corrente, temperatura,
resistência, freqüência, etc;
Canal da placa utilizado na aquisição;
Modo de operação do canal: entrada ou saída;
Modo de medição das entradas: SER ou diferencial;
Freqüência de amostragem do sinal.
Write to Measurement File:
Escreve e armazena dados em formato texto (.lvm) ou binário
(.tdm ou .tdms).
Waveform Chart:
Constrói em tempo real o gráfico referente ao valor de alguma
variável
Merge Signals:
Permite mesclar dois ou mais sinais em uma só saída.