CONTROLE DO CONVERSOR BUCK PARA MÓDULOS DA CADEIRA DE
RODAS ACIONADA POR SOPRO E SUCÇÃO.
Pedro Henrique Bonilha Mantovani (PIBIC/CNPq-UEL), Márcio Roberto
Covacic (Co-Orientador), Rodrigo da Ponte Caun, Ruberlei Gaino
(Orientador), e-mail: [email protected]
Universidade Estadual de Londrina/Departamento Engenharia Elétrica
Palavras-chave: Conversor Buck, Função de transferência, Simulação.
Resumo:
Este trabalho propõe o estudo de um conversor Buck, abaixador de
tensão DC/DC que utilizará leis de controle para melhorar o desempenho do
conversor, através da adição de um controlador proporcional integral (PI)
como controlador, este PI atua amortecendo a resposta da saída do
conversor, diminuindo os ruídos e estabilizando o sinal de saída. A técnica
de controle utilizada foi em malha fechada, que se utiliza das informações da
saída do sistema realimentado, a fim de determinar uma comparação entre
os dois sinais (saída e entrada), e determinar efetivamente o sinal de
controle. Este conversor atuará como uma interface para o acréscimo de
qualquer módulo a ser iniciado com uma tensão inferior a 12V, referente as
baterias que servem de alimentação para uma cadeira de rodas que é
acionada por sopro e sucção que auxilia na reabilitação de paraplégicos e na
locomoção de tetraplégicos.
Introdução
1) Função de transferência:
Em um sistema de equações diferenciais lineares invariantes no tempo a
função de transferência é definida como a relação da transformada de
Laplace da saída (função resposta) e a transformada de Laplace da entrada
(função excitação) com a hipótese de que todas as condições iniciais são
nulas (ASSUNÇÃO E TEIXEIRA, 2010).
2) Sistemas de controle em malha fechada:
O controle em malha fechada é aquele onde a variável de saída do
sistema que será controlado tem efeito na ação do controle, eles também
podem ser chamados de sistemas de controle realimentados pelo fato da
variável de saída ser realimentada ao sistema via controlador, de modo
geral, a fim de fazer com que o sistema se torne mais preciso deve-se
também esperar que ele reaja a perturbações externas. Para isso a ação de
controle toma como base a comparação entre o valor de referência e o valor
atual da variável de saída (OGATA, 2010).
3) Funcionamento do Conversor Buck DC-DC:
O conversor Buck DC-DC é um conversor abaixador de tensão que
trabalha produzindo um valor médio de tensão de saída inferior ao valor
médio da tensão de entrada, enquanto que a corrente média de saída tem
um valor superior ao valor da corrente média de entrada, tendo um
comportamento consequente ao princípio de conservação de energia
(MARTINS, BARBI, 2006).
4) Técnica de controle para o Lugar das Raízes:
O método do lugar das raízes, utilizado para auxiliar na descoberta do
controlador, possibilita o estudo da evolução das raízes de uma equação,
quando é variado continuamente um parâmetro. Deste modo é possível
determinar este parâmetro para que o sistema atinja o comportamento
dinâmico desejado.
Materiais e métodos
- Software Matlab
- Software Simulink
- Software Orcad
Inicialmente, foi encontrada a função de transferência referente ao conversor
Buck DC-DC, após isso com o auxílio do software Matlab foi encontrado o
tipo de controlador que deveria ser utilizado para otimizar a saída do sistema
e por fim foram feitas as simulações no software Orcad do circuito elétrico do
conversor Buck DC-DC acoplado ao controlador, resultando o esperado.
Resultados e Discussão
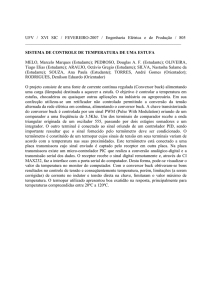
Primeiramente foi encontrada a função de transferência referente ao
conversor Buck resumido para facilitar os cálculos apresentado na figura 1,
Figura 1 - Circuito resumido do conversor Buck estudado.
(1)
(2)
(3)
(4)
(5)
(6)
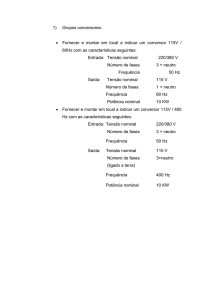
Após isso com o auxílio da técnica do lugar das raízes e do software
Matlab pôde-se encontrar o root locus apresentado na figura 2 que nos
auxiliou na descoberta do controlador.
Figura 2 - Gráfico do Root locus referente a FT do Buck.
Em seguida descobriu-se que a melhor opção para este sistema
seria um controlador proporcional e integral (PI), então utilizando as
fórmulas para o cálculo do controlador chegamos a seguinte equação 7:
(7)
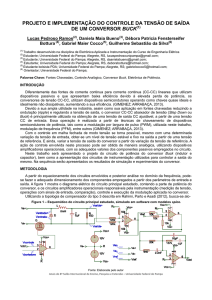
Após a descoberta de todas as variáveis foi feito o circuito elétrico no
software Orcad do conversor acoplado ao controlador, este circuito pode
ser visto através da figura 3 a seguir:
Figura 3 - Circuito elétrico referente ao conversor Buck e seu controlador.
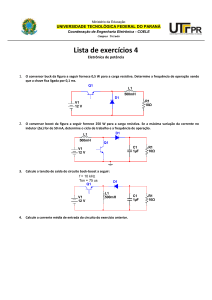
Em seguida foram feitas as simulações referente a saída do
conversor Buck e pôde-se encontrar o resultado visto na figura 4:
Figura 4 - Gráfico da saída do conversor Buck DC-DC em simulação.
Analisando o gráfico podemos perceber que os resultados foram
satisfatórios resultando em uma saída mais otimizada e estabilizada
referente ao conversor sem o controlador.
Conclusões
Após todos os processos e desenvolvimentos apresentados sobre o
trabalho podemos concluir que a resposta de saída do conversor Buck DCDC era muito irregular com um ruído muito grande, então através do
controlador proporcional e integral (PI) pôde-se controlar a saída, diminuindo
os ruídos para o percentual desejado a fim de deixa-la o mais estável
possível. Com isso agora temos uma saída ainda com ruídos, porém bem
menor do que sem o controlador, otimizando então o sistema.
Agradecimentos
Agradeço a CNPq pelo fomento à pesquisa acadêmica em todo o
Brasil, ao meu orientador Prof. Dr. Ruberlei Gaino por toda ajuda e
orientação a Universidade Estadual de Londrina pela estrutura fornecida. Ao
professor Rodrigo da Ponte Caun UTFPR de Toledo, pelo apoio ao projeto
com sua experiência.
Referências
OGATA, K. Engenharia de Controle Moderno. 4 ed. Pearson Brasil,
2010.
MARTINS, D. C., BARBI, I., Conversores CC-CC Básicos NãoIsolados. 2 ed. Florianópolis: Edição dos Autores, 2006.
ASSUNÇÃO, E., TEIXEIRA, M.C.C.M., Apostila Controle Linear I,
2006