Enviado por
common.user4291
amplitude otimo

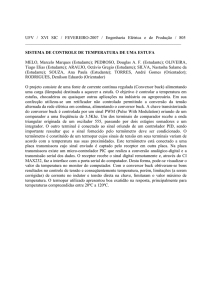
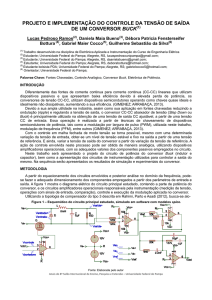
PPGEE/UFC - PROGRAMA DE PÓS-GRADUAÇÃO EM ENGENHARIA ELÉTRICA/ UNIVERSIDADE FEDERAL DO CEARÁ CURSO DE MESTRADO EM ENGENHARIA ELÉTRICA – TURMA 2018.1 DISCIPLINA: ESTUDOS ESPECIAIS EM ENGENHARIA ELÉTRICA II TECNICAS DE CONTROLE DIGITAL APLICADOS A CONVERSORES ESTÁTICOS AREA DE CONCENTRAÇÃO: SISTEMAS ELÉTRICOS DE POTÊNCIA TRABALHO IX- Amplitude Ótima DISCENTE: DÉLCIO AGUIAR JOSÉ BARRETO DOCENTE: PROF. DRs. PAULO PRAÇA e WILKLEY BEZERRA FORTALEZA-CEARÁ SETEMBRO, 2018 1. OBJETIVO Este trabalho tem como objetivo projetar um controle do conversor buck utilizando o método de amplitude ótima. 2. INTRODUÇÃO Como a planta a ser controlada é um conversor Buck, a primeira parte deste trabalho aborda aspectos referentes ao projeto de um conversor. São apresentadas as equações usadas no dimensionamento dos componentes eletrônicos do circuito. O trabalho apresenta também o projeto do compensador utilizado para regular a corrente de saída do conversor. O desempenho do conversor e do compensador é avaliado por meio de simulação computacional. 3. PROJETO DE CONVERSOR BUCK Para os estudos realizados nesse trabalho utilizou-se um conversor Buck alimentado por uma tensão de 150V que apresenta em sua saída uma tensão de 60V. As especificações do projeto são as seguintes: Tabela 1- Especificações do Projeto do conversor Buck Tensão de Entrada 150 V Tensão de Saída 60 V Potência da Carga 120 W Frequência de Chaveamento 50000 Hz Ondulação de tensão 2% Ondulação de Corrente 2% Período de Chaveamento 0,002% s Projeto do Indutor Para projetar o indutor é necessário calcular a sua indutância. Esse valor será encontrado de forma que o conversor funcione no modo de condução contínua. 2 Calculou-se o valor da indutância L a partir de (1). Para os valores acima, tem-se L = 18.746 mH. Em seguida o valor de L é aplicado em (2) para o cálculo do capacitor, resultando em C = 5.16 μF. Tais parâmetros representam os valores mínimos para que o conversor opere da forma desejada. Os valores reais utilizados foram L = 18.75 mH e C = 5.2 μF. Vin 4*fs*i L= (1) , sendo fs a frequência de chaveamento e i a ondulação de corrente dada por: i = I médio *0.02 , em que a corrente média ( I médio ) é a corrente da carga ( I carga ). Cálculo do capacitor de saída Após calcular o valor da indutância do conversor Buck e projetar seu indutor, foi necessário calcular o valor da capacitância mínima para atender aos parâmetros do projeto. Esse valor pode ser definido pela equação (2), conforme foi dito anteriormente e reescrita a seguir: C= Vin 31* L * v * fs 2 (2) , sendo que v é a ondulação de tensão. Razão Cíclica Para o projeto do indutor e capacitor desse conversor é necessário primeiramente encontrar a razão cíclica mínima e máxima para a operação na tensão de saída desejada A razão cíclica, ou seja, a relação entre a tensão de saída e entrada é dada pela expressão (3), mostrada a seguir: D= Vo Vin (3) 3 Resistência da carga A resistência da carga foi calculada pela seguinte relação: Ro = Vo 2 Po (4) Corrente da carga A corrente da carga é dada pela seguinte equação: Io= Vo Ro (5) 4. OBTENÇÃO DE GANHOS DIGITAIS Considerando a utilização do microprocessador dsPic 30F2020, tem-se as seguintes limitações e configurações: Vf=5 V; n=10 bits; (Fundo de escala) ( Número de bits do conversor AD) Fosc=14.55e6 Hz; (Frequência de oscilação do DSPIC) PLL=32; (Dado do Microprocessador) Iref=2A; (Corrente de Referência) Com essas configurações procedeu-se ao cálculo dos seguintes parâmetros, mostrados pelas equações descritas a seguir: • Referência Digital Ref digital = • I ref *((2n ) − 1) Vf (5) Tensão de Pico Triangular 4 Vtri = • Fosc *PLL*2 fs (6) Ganho do Sensor de Corrente I Hi = ref Ilmed • (7) Ganho do Modulador K pwm = • 1 (8) Vtri Ganho do conversor Analógico-Digital (AD) K AD = ((2n ) − 1) Vf (9) 5. OBTENÇÃO DE FUNÇÃO DE TRANSFERÊNCIA A função de transferência que relaciona 𝑉𝑜(𝑠) com 𝑉𝑖(𝑠) pode ser expressa conforme a relação: A função de transferência considerando os ganhos anteriores é dada por: G2= Io d E = KM KPWM KA/D (2) sL+Ro 5 6. OBTENÇÃO DO COMPENSADOR Para a compensação do sistema utilizou-se um compensador Pi dado pela seguinte equação: C(s) = K r (Tr s + 1) 𝑠 Onde: Kr = 1 2𝐾Tα = 3.2185𝑒 + 04, 𝐾 = 0.0549, Tα = 2.8281e-04 Tr = Ti = 3.4223e-04 Assim: C(s) = 11.01𝑠 + 3.218𝑒04 𝑠 Utilizando o método de Tustin, a função da planta com os ganhos foi discretizada: C(Z) = 11.34𝑧 − 10.69 𝑧−1 UK = U(K−1) + 11.34EK − 10.69E(K−1) Considerando o Delay (atraso intrínseco ao chaveamento), a função de transferência de malha aberta é dada por: 6 𝐺(𝑀𝐴) = 0.0549 3.4223e − 04s + 1 𝑇𝑒 = 2 1 s𝑇𝑒 + 1 1 = 4.0000𝑒 − 05𝑠 𝑓𝑠 Logo: 𝐺(𝑀𝐴) = 0.0549 3.4223e − 04s + 1 𝐺(𝑀𝐴) = 1 (4.0000𝑒 − 05s + 1) 0.006421 s 4e − 05 s^2 + 1.117 s + 2922 Kr=2.2755e+05 A Função de transferência do compensador é dada por: 𝐺(𝑠) = 77.88s + 2.276e05 s Utilizando o método de Tustin, a função da planta com os ganhos foi discretizada: C(Z) = 80.15 𝑧 − 75.6 𝑧−1 UK = U(K−1) + 80.15EK − 75.6E(K−1) 7. SIMULAÇÃO DO CONTROLADOR DIGITAL Na figura 1, encontra-se o circuito dimensionado do conversor buck com a malha aberta. 7 Figura 1- Conversor buck de malha aberta Na figura 2, encontra-se o circuito dimensionado do conversor buck com a implementação do controlador digital. Figura 2- Conversor buck com a implementação do controlador digital. O código do controlador digital implementado é mostrado a seguir: 8 Considerando delay intrínseco o código implementado é mostrado a seguir: 9 Em seguida é mostrada a forma de onda de tensão e corrente na carga em resposta ao degrau. Figura 3- Forma de onda de tensão e corrente na carga em resposta ao degrau (sem Delay). Em seguida, apresenta-se a forma de onda de tensão e corrente da carga com delay intrínseco. Figura 4- Forma de onda de tensão e corrente da carga com delay intrínseco. Notabilizou-se uma otimização da resposta degrau considerando o delay intrínseco, tendo um menor tempo de atraso durante o degrau. 10 8. REFERÊNCIAS Material disponibilizado na sala de aulas 9. ANEXOS Parâmetros gerados pela folha de cálculo do Matlab. --------------------------------------Razao Ciclica =0.4, Complemento da razão Ciclica = 0.6, Resistencia =30, Corrente da Carga =2, Corrente media= 2 --------------------------------------, Ganho do sensor de corrente=1, Ganho do Conversor AD =204.6, Referencia Digital =409.2, Ganho Mod=5.3694e-05 --------------------------------------Pico da Triangular =18624, Indutancia=0.01875, Capacitancia=5.1613e-06 --------------------------------------- 11