Máquinas Síncronas
Máquinas Eléctricas
ESTG-IPL
2000/2001
Conteúdo
1 Generalidades
1.1 Particularidades construtivas . . . .
1.1.1 Máquinas de rotor cilíndrico
1.1.2 Máquinas de pólos salientes
1.1.3 Enrolamento amortecedor .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
2 Excitação
2
2
3
4
4
4
3 Funcionamento enquanto gerador
3.1 Análise de funcionamento . . . . . . . .
3.2 Circuito equivalente . . . . . . . . . . . .
3.3 Determinação da reactância síncrona . . .
3.3.1 Ensaio de circuito aberto . . . . .
3.3.2 Ensaio de curto-circuito . . . . .
3.3.3 Reactância síncrona não-saturada
3.3.4 Reactância síncrona saturada . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
9
9
9
11
11
11
12
12
4 Características de potência e binário
12
5 Curvas de capabilidade
14
6 Geradores independentes
14
7 Funcionamento em paralelo com a rede
7.1 Condições para paralelismo . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.2 Relação Frequência-potência e Tensão-Potência reactiva . . . . . . . . . . . . .
15
16
17
8 Funcionamento como motor
8.1 Circuito equivalente . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.2 Arranque . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
18
19
19
9 Máquinas de pólos salientes
9.1 Correntes e reactâncias d-q . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
20
20
1
1 Generalidades
As máquinas síncronas constituem uma das famílias de máquinas eléctricas mais importantes.
Os geradores síncronos produzem a maior parte da energia eléctrica consumida no mundo. Os
motores síncronos por sua vez são muito utilizados, tanto pela característica de possuirem uma
velocidade garantida em função da frequência, como pela característica, de resto comum aos dois
modos de funcionamento, do seu factor de potência ser regulável.
Segundo o vocabulário electrotécnico internacional, “uma máquina síncrona é uma máquina
de corrente alterna na qual a frequência da tensão induzida e a velocidade possuem uma relação
constante”. VEI 411-01.06
A sua velocidade de rotação é por esse motivo designada a velocidade de sincronismo e é dada
por n = f × p/60 (rpm), em que f é a frequência e p o número de pares de pólos.
MS
3~
GS
3~
Figura 1: Símbologia usada para motores/geradores síncronos
1.1 Particularidades construtivas
O induzido da máquina síncrona, normalmente no estator, é idêntico ao da máquina assíncrona,
e portanto constituido por um enrolamento distribuido, normalmente trifásico e com um ou mais
pares de pólos.
Figura 2: Enrolamento estatórico de uma máquina síncrona
2
O indutor, normalmente no rotor, é constituido por um enrolamento monofásico alimentado
por corrente contínua, também designado enrolamento de campo ou de excitação, embora se assista a um progressivo uso de ímanes permanentes em substituição desse enrolamento, nas unidades
de menor potência.
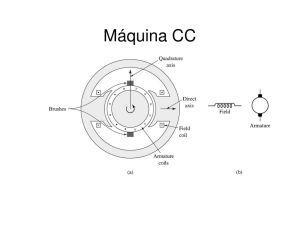
Normalmente este último orgão apresenta-se sob duas formas possíveis, originando duas famílias de máquinas:
• Máquinas de rotor cilíndrico, ditas turbo-alternadores ou turbo-motores. Neste caso o enrolamento rotórico é distribuido.
• Máquinas de pólos salientes, em que o enrolamento é constituido por bobines concentradas
em torno das cabeças polares.
Figura 3: Tipos de máquinas sincronas
1.1.1 Máquinas de rotor cilíndrico
Constroem-se deste modo máquinas que rodam a velocidades elevadas uma vez que não se ultrapassa com este tipo de enrolamento os 2 ou 4 pólos.
São compostas de peças com grande resistência mecânica, normalmente rotores maciços em
aço.
As restrições mecânicas impõem o limite de 1250 mm para o diâmetro a 3000 rpm, o que
provoca a forma alongada para este tipo de máquinas.
3
Figura 4: Rotor de turbo-gerador
As unidades de potência superior a 125 MVA rodam em hidrogénio para reduzir perdas por
ventilação e aumentar a potência específica.
As potências máximas ultrapassam os 1200 MVA a 3000 rpm e os 1650 MVA a 1500 rpm
(valores de 1982).
1.1.2 Máquinas de pólos salientes
Este tipo de construção é possível para todas as velocidades de rotação síncrona e toda a gama de
potências. O no de pólos mínimo é no entanto fixado em 4.
Este tipo de máquina é usado por exemplo em centrais hidro-eléctricas, acoplado a turbinas
Francis ou Kaplan, devido à velocidade ser reduzida, segundo a natureza da queda. Por esse
motivo, são máquinas com muitos pólos o que as leva a serem maiores em diâmetro do que em
profundidade. A figura 5 representa o estator de um gerador de 500MVA, 15kV de uma central
hidroeléctrica. Note-se a forma larga e pouco profunda.
É a forma mais comum para motores, sobretudo para os que rodam a velocidades inferiores a
1500 rpm (50 Hz).
1.1.3 Enrolamento amortecedor
Na maior parte das máquinas síncronas existe ainda um terceiro enrolamento colocado no rotor,
do tipo gaiola, semelhante ao das máquinas assíncronas. Este enrolamento destina-se a amortecer
oscilações de binário mecânico que provoquem quebras de sincronismo , e que poderiam causar a
saída de serviço da máquina uma vez que fora do sincronismo esta deixa de produzir binário útil
(motor ou gerador). Fora do sincronismo circularão correntes neste enrolamento, à frequência de
escorregamento, que pela lei de Lenz criam binário com sentido oposto à variação, que tende a
repor a situação de sincronismo.
Este enrolamento amortecedor possibilita ainda o arranque assíncrono de uma máquina síncrona, que de outra maneira não possui binário de arranque (ver capítulo 3 dos textos de apoio).
2 Excitação
A máquina síncrona possui normalmente o enrolamento induzido (ou de armadura) no estator,
sendo um enrolamento normalmente polifásico, onde circulam correntes alternas. O enrolamento
4
Figura 5: Estator de um gerador de central-hidroeléctrica
Figura 6: Polo saliente de uma máquina com as barras do enrolamento amortecedor
5
de excitação (ou indutor) está no rotor e é alimentado por corrente contínua através de anéis de
colector colocados no veio, sobre os quais deslizam escovas.
A potência DC requerida para a excitação aproxima-se de 1% da nominal, podendo ser fornecida a partir da rede através de rectificadores controlados, ou através de uma “excitatriz”, gerador
mais pequeno autoexcitado ou não, DC ou AC com rectificadores, montado sobre o mesmo veio.
Neste último caso a excitatriz é fabricada com os enrolamentos ao contrário de forma a que o
induzido esteja no rotor, e deste modo, montando o rectificador no próprio rotor é possível evitar
as escovas intermédias, tornando o conjunto mais eficiente e robusto. A figura 7 representa um
esquema ilustrativo de sistemas com excitatriz DC no mesmo veio, actualmente em desuso. A
figura 8 ilustra um exemplo de máquina e excitatriz AC no mesmo veio em que se podem observar
os rectificadores electrónicos junto ao induzido desta última à esquerda
Figura 7: Excitatriz DC
Figura 8: Excitatriz AC com díodos montados sobre o veio
O uso de excitatrizes AC é mais conveniente porque evita escovas e os aneis, elementos causadores de problemas de manutenção e de perdas, que se tornam intoleráveis para máquinas de
grande potência e que exigem grande disponibilidade. Apenas em máquinas pequenas este tipo de
6
solução pode não ser economicamente atractivo. As excitatrizes DC cairam em desuso porque não
possuem actualmente qualquer vantagem sobre quaisquer uma das outras duas opções, uma vez
que não evitam o uso de escovas devido à necessidade do comutador.
O controlo da excitação da máquina principal faz-se assim através do controlo da excitação da
máquina mais pequena, que estando montada ao contrário possui este enrolamento no estator. A
figura 2 mostra Um circuito de excitação sem escovas. O controlo da excitação é aqui feito pelo
reóstato RF, embora possa ser feito logo na ponte rectificadora, usando tiristores
Em certos casos pode existir uma segunda excitatriz piloto, esta com îmã permanente no rotor,
cujo estator alimenta então o estator da excitatriz principal, evitando assim o uso de qualquer fonte
externa de tensão.
Figura 9: Circuito de excitação sem escovas
Apesar do uso de excitação no próprio veio, certas máquinas podem ainda possuir anéis e
escovas para possibilitar a alimentação externa em caso de emergência.
No caso de não existir uma excitatriz piloto auto-excitada com imã permanente (ou no passado
um gerador DC autoexcitado), a alimentação ao circuito de excitação tem de provir da rede a abastecer, tendo normalmente como alternativa um circuito secundário alimentado por outro gerador e
eventualmente até baterias de acumuladores para situações de arranque isolado.
7
Figura 10: Um circuito de excitação com excitatriz piloto
8
3 Funcionamento enquanto gerador
Um simples gerador síncrono a fornecer potência activa a uma impedância de carga, actua como
uma fonte de tensão com frequência determinada pela velocidade da máquina primária. A corrente
e o factor de potência são então determinados pela excitação, e pela impedância do gerador e da
carga.
Os geradores síncronos estão prontos a ser ligados em paralelo, e de facto, as redes eléctricas dos países industrializados compõem-se de centenas de alternadores a funcionar em paralelo.
interligados por centenas de quilómetros de linhas de transmissão, e fornecem energia a cargas
situadas a grande distância. Estes sistemas monstruosos, apesar de muito difíceis de gerir, possibilitam a continuidade do serviço eléctrico, face a falhas, necessidades de manutenção, e questões
económicas.
Quando um gerador síncrono está ligado a uma rede de grande dimensão, contendo muitos outros geradores síncronos (diz-se uma rede infinita ou de inércia infinita) a tensão aos seus terminais
e a frequência das correntes geradas são fixadas pelo sistema. Na realidade dado que as correntes
que circulam na armadura possuem a frequência da rede, vão criar um campo girante que roda à
velocidade de sincronismo. Para que haja um binário estável, como é sabido o rotor tem de girar
à mesma velocidade. Como um gerador individual é uma pequena fracção de um grande sistema,
não poderá afectar significativamente nem a tensão nem a frequência, dai o pressuposto normalmente usado para análise, de representar o sistema como uma fonte de tensão fixa e de frequência
fixa denominada barramento infinito
3.1 Análise de funcionamento
A partir do momento em que o indutor cria um campo constante φ, se se fizer rodar um dos
enrolamentos a uma velocidade constante Ω (rad/s), vai aparecer uma tensão e aos terminais de
cada fase do induzido dada pela equação 1, em que ω = pΩ representa a velocidade do campo
magnético em rad eléctricos por segundo, p é o número de pares de pólos e Ni é o número de
espiras por fase.
e = ωNi φ f cos(ωt)
(1)
√
O valor eficaz da tensão induzida será então E = ωNi φ/ 2 = Kφ f ω, sendo K um valor constante. A frequência da tensão induzida é dada por f = ω/2π ou f = np/60 se n for a velocidade
do motor em rpm.
O valor da tensão é por isso proporcional ao fluxo criado pelo indutor, mas a relação com a
corrente de excitação não é igual devido à existência da saturação. Esta relação torna-se ainda
menos linear a partir do momento em que circule corrente nos enrolamentos estatóricos, pois pela
lei de Lenz serão responsáveis pela criação de um campo normalmente oposto ao do indutor, efeito
conhecido por reacção do induzido.
3.2 Circuito equivalente
Se o circuito do induzido for fechado sobre uma carga, vai circular por ele uma corrente que será
responsável por perdas por efeito de Joule na resistência do próprio enrolamento, e também pela
existência de fugas magnéticas em torno dos condutores. Estes efeitos, semelhantes aos que se
verificavam para outros tipos de máquinas, levam-nos ao modelo de circuito equivalente.
Este modelo é usado para analisar o funcionamento em regime permanente tanto em motor
como em gerador. Como se trata de regime permanente são desprezados os transitórios ocorridos
tanto no circuito de excitação como no enrolamento amortecedor. Trata-se como noutros casos de
um modelo fase-neutro.
9
Figura 11: Gerador elementar
A corrente I f que circula no enrolamento indutor (normalmente o rotor), cria um fluxo φ f no
entreferro. Por seu lado a corrente ii que circula nas fases do induzido, cria um fluxo oposto φi .
Uma parte desse fluxo corresponde ao fluxo de fugas φσi que está acoplado somente ao próprio
enrolamento. A maior parte, no entanto, atravessa o entreferro, e é conhecido por fluxo de “reacção
do induzido”, φri e também está acoplado ao enrolamento de excitação.
O fluxo no entreferro resultante é então:
φri + φ f
Cada componente do fluxo induz uma componente da tensão no estator, respectivamente eri
e e, sendo que tal como os fluxos possuem sinais opostos pelo que a tensão resultante pode ser
representada pela soma dos fasores Ēri e Ē. O primeiro estando relacionado com a corrente no
induzido dá origem a um fluxo de indução λri = Ni φri , e por isso pode ser representado por uma
indutância Lri = λri /ii . Sendo Ēri uma tensão induzida, pode ser representada como o simétrico
da queda de tensão na reactância Xri = ωLri , ou:
Ēri = − jXri I¯i
O induzido pode assim ser representado por uma fonte de tensão Ē dependente apenas da
velocidade, que em cada análise se considerará constante pois só assim se garante a frequência
e o valor das reactâncias, e do fluxo criado pelo indutor; por uma resistência que representa a
resistência do próprio enrolamento em funcionamento, a reactância de fugas do enrolamento Xσi
e a reactância de reacção do induzido Xri . Estas últimas representam-se normalmente associadas
numa reactância síncrona Xs (figura 12).
A resistência Rs é a resistência efectiva do enrolamento e é cerca de 1,6 vezes a resistência
DC medida aos seus terminais, devido ao efeito da temperatura e ao efeito pelicular (ver textos de
apoio). É no entanto frequentemente desprezada na análise, principalmente em máquinas grandes.
Como só existe queda de tensão na impedância síncrona se circular corrente no estator, em
circuito aberto, a tensão aos terminais iguala a tensão interna E, correspondendo portanto ao que
já havia sido descrito.
10
Rs
Xs
Vt
E ~
Figura 12: Esquema equivalente
Tabela 1: Parâmetros das máquinas síncronas
Rs
Xσi
Xs
Maq. pequenas
(dezenas kVA)
0,05-0,02
0,05-0,08
0,5-0,8
Maq. Grandes
(dezenas de MVA)
0,01-0,005
0,1-0,15
1,0-1,5
3.3 Determinação da reactância síncrona
A reactância síncrona é um parâmetro importante a conhecer. Para a determinar é necessário
realizar dois ensaios, o ensaio em circuito aberto e o de curto circuito.
3.3.1 Ensaio de circuito aberto
A máquina síncrona é levada à velocidade de sincronismo através de uma máquina primária, estando os terminais do estator em circuito aberto. Mede-se então a tensão aos terminais para diversos
valores da corrente de excitação.
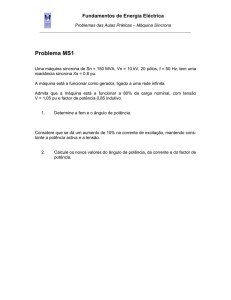
A curva obtida é denominada característica de circuito aberto: OCC1 . Como os terminais do
estator estão em aberto, não circula corrente e portanto esta curva representa E em função de I f .
Note-se que a partir de um dado valor de I f , a curva mostra os efeitos da saturação magnética. A
linha tangente à parte linear da OCC é chamada de linha do entreferro. A tensão interna E varia
ao longo desta linha na ausência de saturação. A figura 13 representa curvas de circuito-aberto e
curto-circuito e representação da reactância síncrona. Note-se que esta só é constante para valores
reduzidos da corrente de excitação, em que se designa por reactância não saturada. IA representa
Ii no texto
3.3.2 Ensaio de curto-circuito
Neste ensaio cada uma das fases do estator é curto-circuitada através de um amperímetro. A máquina é conduzida à velocidade de sincronismo pela máquina primária. Mede-se então as correntes
no estator para diversos valores da corrente de excitação I f , e determina-se o valor médio das três
fases, com o qual se representa a curva característica de curto-circuito (SCC).
A curva SCC é uma linha recta. Isto deve-se ao facto de em curto-circuito não se atingir a
saturação, porque o fluxo magnético se mantém em valores reduzidos. A explicação para este
facto vem de:
1. Como Rs << Xs , a corrente Ii está em atrazo praticamente 90◦ . A fmm de reacção opõe-se
então à fmm do indutor e a resultante é muito pequena. O circuito magnético mantém-se
assin não saturado mesmo para valores elevados de Ii e I f .
1 de
open-circuit caracteristic
11
Figura 13: Curvas de circuito-aberto, curto-circuito e representação da reactância síncrona
2. Na ausência de saturação a tensão interna E vai variar linearmente ao longo da linha de entreferro e portanto a corrente de induzido vai variar linearmente com a corrente de excitação.
3.3.3 Reactância síncrona não-saturada
Pode ser obtida a partir da linha de entreferro (tensão) e da corrente de curto-circuito (SCC) para
um valor particular da corrente de campo:
E
= Rs + jXs(nsat)
Ii
(podendo desprezar-se Rs pelo que Xs(nsat) ≈ Zs(nsat) ).
Zs(nsat) =
3.3.4 Reactância síncrona saturada
Antes de ligar um gerador síncrono a um barramento infinito, ele opera a um dado nível de saturação. Ao estabelecer o paralelo, a sua tensão nos terminais do induzido é mantida constante
no valor da do barramento. Se se variar agora a corrente de excitação, a tensão de excitação E
vai variar agora ao longo de uma linha conhecida como linha de entreferro modificada, e que é a
linha que une a origem, ao ponto da característica correspondente ao valor original da corrente de
excitação.
A explicação para este facto vem de desprezarmos a queda de tensão aos terminais de Rs e Xσi .
Então, como Vt é constante, E será constante independentemente da corrente de excitação. Isto
implica que o nível de saturação será mantido aproximadamente constante e portanto E vai variar
proporcionalmente a I f .
A reactância síncrona saturada será determinada através da linha de entreferro modificada e da
SCC, podendo desprezar-se a resistência Rs .
4 Características de potência e binário
Uma máquina síncrona está normalmente ligada a um barramento de tensão fixa, e roda a uma
velocidade constante. Existe então um limite para a potência que um gerador consegue entregar à
12
rede, sem perda de sincronismo.
∗
Seja V̄t = |Vt |6 0◦ , Ē = |E|6 δ e Zs = Rs + jXs = |Zs |6 θs então S = V̄t I¯i
Pelo circuito equivalente, vem que:
¯∗
¯
∗
∗
¯
¯
¯Ii ∗ = ¯ Ē − V̄t ¯ = Ē − V̄t
¯ Zs ¯
Zs∗ Zs∗
=
=
|E|e− jδ
|Vt |e j0
−
|Zs |e− jθs |Zs |e− jθs
|E| j(θs −δ) |Vt | jθs
e
−
e
|Zs |
|Zs |
e portanto:
S=
|Vt ||E| j(θs −δ) |Vt |2 jθs
e
−
e VA/fase
|Zs |
|Zs |
(2)
A potência activa corresponde à parte real:
P=
|Vt ||E|
|Vt |2
cos(θs − δ) −
cos(θs ) W/fase
|Zs |
|Zs |
(3)
e a reactiva à parte imaginária:
Q=
|Vt ||E f |
|Vt |2
sin(θs − δ) −
sin(θs ) VAR/fase
|Zs |
|Zs |
(4)
Se se desprezar Rs , vem que Zs = Xs e θs = π/2 rad, logo, para uma máquina trifásica:
P=
3|Vt ||E f |
sin δ = Pmax sin δ (W)
|Xs |
(5)
Q=
3|Vt ||E f |
3|Vt |2
cos δ −
(VAR)
|Xs |
|Xs |
(6)
e
A potência varia sinusoidalmente com o ângulo δ, designado por ângulo de carga e atinge o
seu máximo para δ = π/2rad. A figura 14 é uma representação física do ângulo de carga. Os
pólos rotóricos ficam desfasados relativamente aos pólos estatóricos e esse desfasamento depende
da carga. Laboratorialmente pode verificar-se este efeito através de uma marca no veio e de uma
luz estroboscópica, alimentada com a mesma frequência do estator
Figura 14: Representação física do ângulo de carga
13
5 Curvas de capabilidade
Se as potências activa e reactiva por fase forem representadas no plano complexo S, o resultado
(locus) será um círculo de raio |Vt ||E f |/|Xs | com centro em (0, −|Vt |2 /|Xs |). Para um dado ponto
de funcionamento x, o ângulo de carga δ e o ângulo de fase ϕ são facilmente determinados. O
locus da potência máxima, representando o limite em regime permanente é a linha horizontal, para
a qual δ = π/2.
No entanto a máquina síncrona não pode funcionar em todos os pontos do interior do círculo
sem ultrapassar os seus limites estabelecidos. As restrições devem-se a:
1. Aquecimento do induzido, provocado pela corrente de induzido.
2. Aquecimento do enrolamento de campo, provocado pela corrente de campo.
3. Limite de estabilidade estático.
4. Limite de potência da máquina primária
Região de funcionamento
S
δ
limite para potência
no induzido
Q
|Vt ||Et |
Xs
P
Limite de estabilidade δ = π/2
(0, −|Vt |2 /Xs )
limite para potência dissipada
no indutor
Func. como motor
Funcionamento como gerador
Figura 15: Representação dos limites de funcionamento no plano complexo.
6 Geradores independentes
Um gerador síncrono pode ser usado isoladamente para alimentar cargas pequenas ou de emergência, através de motores a gasolina ou Diesel. Interessa sobretudo nestes casos garantir a frequência
e a tensão aos terminais do gerador, uma vez que principalmente a tensão varia facilmente com a
14
carga (ver circuito equivalente). Na realidade a variação da tensão com a carga depende do factor
de potência desta. Uma carga com factor de potência unitário teria uma queda de tensão ligeira,
mas com factor de potência reduzido a tensão tende a cair significativamente em caso de carga
indutiva, ou a subir no caso de carga capacitiva.
A variação de tensão permite-nos determinar a regulação percentual de tensão de um gerador
que,na situação de carga nominal, é determinada por:
Ē − V̄t
× 100 (%)
Ē
(7)
sendo que a tensão interna E corresponde à tensão aos terminais na situação de vazio.
E
δ
jXs Ii
Vt
θ
Ii
Figura 16: Diagrama fasorial de um gerador com carga indutiva
O controlo da tensão para diversas situações de carga depende assim de um ajuste automático
da corrente de excitação, através de um controlo realimentado.
7 Funcionamento em paralelo com a rede
Actualmente o funcionamento de geradores em isolamento só se dá em situações de emergência
ou quando dificuldades técnicas, ou de viabilização económica não permitem a interligação de
um sistema às redes de distribuição de energia eléctrica que interligam milhares de geradores, por
exemplo à escala Europeia.
Existem muitas vantagens na interligação
1. Muitos geradores conseguem servir uma carga bem maior do que um só.
2. A fiabilidade aumenta, pois a probabilidade de falha afecta uma pequena parcela da capacidade instalada de cada vez.
3. Permite a paragem programada de máquinas para manutenção.
4. Quando a carga parcial, um gerador torna-se pouco eficiente, pelo que é melhor ter vários
geradores de tamanho adequado a que cada um deles possa estar em cada instante perto da
sua carga nominal.
15
7.1 Condições para paralelismo
Se o seccionador que interliga um gerador a uma rede fosse fechado num qualquer momento
arbitrário, a segurança de equipamentos e operadores poderia ser posta em causa. É necessário assegurar que a tensão instantânea entre os pólos do seccionador seja realmente nula, caso contrário,
a reduzida impedância poderia levar à circulação de correntes muito elevadas.
Para que a tensão aos terminais do seccionador seja nula é necessário que:
1. Os valores eficazes das tensões do gerador e da rede sejam exactamente iguais
2. A sequência de fases seja a mesma. Se tal não suceder é necessário trocar duas das ligações
ao gerador.
3. A frequência seja praticamente igual, sendo normal usar uma frequência ligeiramente superior na máquina que entra na rede.
A razão para que a frequência não seja exactamente igual mas seja ligeiramente superior é
de que muitos geradores reais possuem uma protecção para inversão de potência, i.e., para evitar
que possam consumir em vez de fornecer potência num dado instante. Ao ligar o gerador numa
situação de perfeita igualdade de frequências este poderia passar por uma momentânea quebra de
velocidade e logo de frequência, e essa situação poderia ocorrer.
Figura 17: Sistema prático para verificação do paralelismo, composto por três lâmpadas ligadas em paralelo com o
seccionador
A verificação do paralelo faz-se usando um sistema de monitorização das condições acima
descritos que no passado tipicamente era constituido por três lâmpadas colocadas em paralelo com
o seccionador, i.e., ligadas entre cada fase do gerador e da rede (figura 17. As ligações podem ser
feitas dos seguintes modos:
1. Entre fases homólogas - circuito OFF
2. Entre fases não homólogas - circuito ON
3. Uma lâmpada entre fases homólogas, e as outras duas entre fases não homólogas.
No primeiro dos casos, quando as condições de sincronismo se derem, as três lâmpadas estarão
apagadas. O problema poderá ser determinar quando é que as lâmpadas estão realmente apagadas
uma vez que uma pequena tensão pode levar a que praticamente não tenham brilho.
16
No segundo caso, a verificação é ainda mais difícil pois trata-se de determinar quando é que
as três estão acesas em simultâneo, e quando é que isso corresponde ao máximo brilho.
O terceiro circuito é o mais garantido uma vez que se trata de determinar o instante em que
uma esteja apagada e as outras duas acesas, e isso só é possível no exacto instante em que as
condições de paralelismo se verificam.
Em qualquer dos casos, se as lâmpadas acenderem uma de cada vez trata-se de uma inversão
na sequência de fases que tem de ser corrigida invertendo duas das ligações ao gerador ou à rede.
O ajuste das condições de paralelismo é feito acertando a velocidade de rotação e a corrente
de excitação.
Actualmente a monitorização é feita directamente às grandezas tensão e frequência, usando
voltímetros e frequencímetros duplos, e à diferença de fase entre duas fases homólogas, usando
um sincronoscópio (figura 18). Neste caso, quando as tensões e frequências forem iguais e o
ponteiro do sincronoscópio passar pela posição das zero horas deve efectuar-se o paralelismo, e
tal pode ser efectuado por um autómato. O ponteiro do sincronoscópio deve estar a rodar devagar
no sentido horário indicando assim uma ligeira diferença entre as frequências tal como descrito
acima. De notar que o sincronoscópio dá indicação apenas sobre uma fase não alertando para uma
possível sequência errada.
Figura 18: Ilustração de um sincronoscópio
7.2 Relação Frequência-potência e Tensão-Potência reactiva
Todos os geradores são accionados por uma qualquer máquina primária, que é a fonte de potência
mecânica. Pode ser uma turbina hidráulica, uma turbina termo-dinâmica, um motor alternativo ou
ainda uma turbina eólica.
Independentemente da fonte original de potência, todas as máquinas primárias se comportam
de forma semelhante, diminuindo ligeiramente a velocidade à medida que a potência que entregam
aumenta. Esta quebra de velocidade é geralmente não linear, mas normalmente algum tipo de
mecanismo regulador encarrega-se de a tornar linear.
Assim sendo, a potência entregue consequentemente por um gerador possui a mesma relação
linear com a frequência dada a relação que esta tem com a velocidade de rotação.
Uma relação semelhante pode ser encontrada entre a tensão e a potência reactiva Q. Tal como
já foi dito, quando se acrescenta uma carga indutiva a um gerador, a tensão aos terminais deste
diminui, e se por contrário acrescentarmos uma carga capacitiva, a tensão aumenta. Mais uma vez
a relação não é linear, mas os reguladores automáticos de tensão tornam-na linear.
17
O que é importante reter aqui, é que numa situação de funcionamento isolado, as potências
activa e reactiva geradas têm de igualar as potências pedidas pela carga, não sendo portanto controláveis pelo gerador. Os reguladores automáticos têm assim de controlar a frequência e tensão
necessárias para obter aqueles valores de potência.
Numa situação de paralelo com a rede (barramento infinito) é o inverso que se passa, i.e., a
frequência e a tensão já não são controláveis directamente, e são estas que determinam as potências
activa e reactiva a entregar.
Raciocinando sobre o diagrama fasorial do gerador em paralelo, com base na figura 16 e na
equação 5, verifica-se que se a frequência e a tensão aos terminais são fixas, o aumento de potência activa a fornecer, correspondendo a um aumento da potência entregue pela máquina primária
reflecte-se no ângulo δ ou ângulo de carga. Quanto à potência reactiva esta depende essencialmente do módulo de E, logo vai ser controlada pela excitação da máquina síncrona. A partir de uma
situação de referência, a sobre-excitação ou aumento da corrente de excitação aumenta o fornecimento de energia reactiva indutiva (partindo do pressuposto que o barramento infinito a absorve),
e diminuindo a excitação, reduz-se esse fornecimento, podendo mesmo absorver energia reactiva.
A ideia pode ser melhor entendida se se imaginar que tendo o gerador síncrono a sua própria
excitação não necessita de consumir qualquer energia reactiva externa como acontece no caso do
gerador assíncrono. Um excesso de excitação tem assim que ser entregue à rede sob a forma de
energia reactiva, e um défice de excitação leva à necessidade de consumir um pouco dessa energia.
A capacidade de controlar a potência reactiva a entregar é uma das características mais importantes das máquinas síncronas, e contribui decisivamente para a sua escolha como gerador,
dada a grande importância que o controlo das trocas de energia reactiva numa rede tem para uma
companhia eléctrica.
8 Funcionamento como motor
Os motores síncronos possuem como características essenciais a garantia da velocidade dada a
frequência de alimentação e o controlo sob o factor de potência.
A primeira resulta óbvia das considerações já feitas e torna-se importante em muitas situações
práticas tais como a alimentação de caldeiras de centrais termoeléctricas, ou mesmo em drives de
computadores.
A segunda é explicada pela análise já feita à máquina enquanto gerador, e torna-se extremamente útil ao permitir usar este tipo de motores até para compensar a energia reactiva consumida
por outros motores numa mesma instalação. Aliás, as companhias eléctricas possuem algumas
máquinas deste tipo “penduradas” em alguns nós da rede, normalmente a funcionar em vazio para
que toda a sua potência aparente esteja disponível para “fornecer” ou “consumir” energia reactiva
indutiva. Estas máquinas assumem a designação de compensadores síncronos
Os motores síncronos são habitualmente mais caros do que os de indução, principalmente na
gama baixa, mas são principalmente competitivos quando se destinam a velocidades muito baixas
(muitos pólos), e/ou para potência elevadas. Os de imân permanente são praticamente tão robustos
como os de indução, assim como os sem escovas.
Por fim, note-se que, como um motor síncrono não tem binário se não à velocidade de sincronismo, e deve ser arrancado por um processo auxiliar, como um motor de arranque que leve o
conjunto motor+carga até à velocidade correcta e depois seja desligado.
Uma alternativa consiste no arranque assíncrono, possível quando o motor possui um enrolamento amortecedor, e possa arrancar sem carga. Desse modo, não alimentando o enrolamento de
excitação, obtém-se um modo de funcionamento assíncrono, que possibilita atingir uma velocidade muito próxima da de sincronismo quando em vazio, sendo então possivel que ao alimentar o
enrolamento de excitação o binário oscilante leve o motor à velocidade de sincronismo.
18
8.1 Circuito equivalente
O circuito equivalente do motor síncrono é idêntico ao já determinado para o gerador, invertendo
o sentido da potência e obviamente da corrente.
As equações resultam então em:
V̄t = Ē + jXs I¯i + Rs I¯i
(8)
Ē = V̄t − jXs I¯i − Rs I¯i
(9)
ou
Ii
θ
δ
Vt
E
jXs Ii
Figura 19: Diagrama fasorial enquanto motor
A equação 9 resulta no diagrama fasorial da figura 19. Por análise do diagrama e da equação
podemos encontrar agora explicações para questões já referidas anteriormente.
A equação de potência é análoga à equação 5, sendo que agora o ângulo de carga, δ, representa
a carga mecânica, e pode ser visualizado dado o atrazo que o eixo polar rotórico tem relativamente
ao eixo polar estatórico. Laboratorialmente pode verificar-se que esse ângulo aumenta com a
carga, e o seu máximo é novamente π/2.
O binário decorre então da expressão da potência e vem:
T=
3|Vt ||E|
3p|Vt ||E|
P
=
sin δ =
sin δ (Nm)
Ωs
Ωs Xs
2π f Xs
(10)
onde Ωs é a velocidade de sincronismo em rad/s, p é o número de pares de pólos, e f a frequência.
Pode então demonstrar-se que variações no binário de carga, dado que tanto Vt , f , como E
são constantes, sendo as primeiras fixados pela rede, e E fixada pela excitação, só pode então
reflectir-se sob a forma de variações no ângulo δ.
Já a variação da excitação para uma mesma carga vai proporcionar diferentes ângulos de fase
entre a corrente e a tensão, demonstrando o efeito de controlo sob o factor de potência já referido.
O módulo da corrente I¯i também é afectado por esta variação, sendo que o gráfico desta face à
corrente de excitação, I f , mostra uma característica forma em V. Na figura 20, A linha tracejada
indica as situações de f.p. unitário.
8.2 Arranque
Tal como já foi afirmado, um motor síncrono não possui binário de arranque. Um de três métodos
tem assim de ser usado para o levar à velocidade de sincronismo:
19
Figura 20: Corrente no induzido vs corrente de excitação para vários valores de carga.
1. Reduzir a velocidade de sincronismo para valores suficientemente baixos para que o binário
oscilante consiga arrancar o motor. Isto pode ser feito com um conversor de frequência
2. Através de um motor de arranque externo, e procedendo tal como se de um gerador se
tratasse, com todas as cautelas necessárias ao paralelo. Após estar interligado, pode desligarse o motor de arranque passando a máquina síncrona a consumir potência eléctrica para
manter a velocidade.
3. Usando o arranque assíncrono já explicado. Neste caso, deve não se alimentar o indutor até
que a velocidade alcançada seja máxima, devendo para isso estar sem carga. Ao alimentar
então o indutor, o binário oscilante criado provocará o salto para o sincronismo, podendo a
partir dai acrescentar-se carga ao veio.
9 Máquinas de pólos salientes
As máquinas síncronas de velocidade reduzida, multipolares, têm pólos salientes e portanto entreferro não uniforme. A relutância magnética é reduzida junto às faces polares e elevada entre elas.
Assim sendo, uma fmm de reacção de armadura vai produzir mais fluxo no eixo polar, chamado
eixo d, do que no eixo interpolar, eixo q. Na maquina de rotor cilíndrico a reacção do induzido
é approximadamentre uniforme ao longo de todo o entreferro. É assim óbvio que uma simples
reactância de reacção de induzido, Xri não pode ser usada nas máquinas de pólos salientes.
9.1 Correntes e reactâncias d-q
A FMM do induzido Fi e portanto também Ii podem ser decompostas em duas componentes, uma
no eixo d outra no eixo q. As FMM (Fid , Fiq ), resultantes das correntes (id , iq ), criam os fluxos
(φid , φiq ), e portanto podem representar-se através de Xid e Xiq respectivamente.
Se contarmos com a reactância de fugas Xσi (que é praticamente apenas um fenómeno estatórico), ficamos com: Xd = Xσi + Xid e Xq = Xσi + Xiq
Obviamente Xd > Xq porque a relutância é menor ao longo do eixo d. Xq é entre 0.5 a 0.8 de
Xd .
20
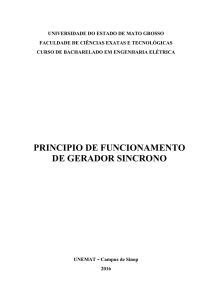
Figura 21: Chapa de características de um motor síncrono. De notar o factor de potência unitário desta unidade, assim
como a indicação da tensão de excitação nominal. A potência está expressa em hp embora pudesse estar em kW. Esta
seria a grande diferença para um gerador síncrono, em que a potência nominal estaria representada em kVA
As novas equações da máquina vêm:
Ē = V̄t + I¯i Ri + I¯d jXd + I¯q jXq
I¯i = I¯d + I¯q
O diagrama fasorial do gerador é mostrado na figura, para um atrazo de ii face a E de ψ (o
ângulo de fase interno). Se se conhecer este ângulo , as componentes da corrente são determinadas
decompondo a corrente I¯i na direcção de E (eixo q) e na direcção perpendicular a esta. Infelizmente
só se conhece normalmente o ângulo entre Vt e Ia (ϕ), por isso é necessário determinar o ângulo
entre Vt e E f (δ).
Do diagrama fasorial:
ψ = ϕ±δ
Id = Ii sin ψ
Iq = Ii cos ψ
Vt sin δ = Iq Xq = Ii Xq cos(ϕ ± δ)
tan δ =
Ii Xq cos ϕ
Vt ± Ii Xq sin ϕ
logo
E = Vt cos δ ± Id Xd
21