ANTONIO FRANCISCO CARDOZO
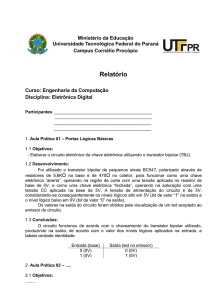
PROGRAMAÇÃO DA PORTA PARALELA E MICRO
MICROCONTROLADORES PARA INSTRUMENTAÇÃO DOS
DOS
LABORATÓRIOS DIDÁTICOS DE FÍSICA
JI-PARANÁ,RO
JI PARANÁ,RO
OUTUBRO 2010
ANTONIO FRANCISCO CARDOZO
PROGRAMAÇÃO DA PORTA PARALELA E
MICROCONTROLADORESPARA INSTRUMENTAÇÃO DOS
LABORATÓRIOS DIDÁTICOS DE FÍSICA
Trabalho de Conclusão de Curso apresentado
ao Departamento de Física de Ji-Paraná,
Universidade Federal de Rondônia, Campus de
Ji-Paraná, como parte dos quesitos para a
obtenção do Título de Especialista em Ensino
de Física, sob orientação do Professor Dr.
Robinson Viana Figueroa Cadillo e coorientação do Professor Dr. Edgar Martinez
Marmolejo,
JI-PARANÁ,RO
OUTUBRO DE 2010
Cardozo, Antonio Francisco
C268p
Programação da porta paralela e micro-controladores para
instrumentação dos laboratórios didáticos de física / Antonio Francisco
2010
Cardozo ; orientador, Robinson Viana Figueroa Cadillo. -- Ji-Paraná, 2010
53 f. : 30cm
Trabalho de conclusão do curso de Pós-graduação em Ensino de Física.
Universidade Federal de Rondônia, 2010
Referências bibliográficas
1. Física Estudo e ensino. 2. Física e informática. 3. Física Prática de
ensino. 4. Física Ensino-aprendizagem. 5. Física Programação
(Informática). I. Cadillo, Robinson Viana Figueroa.
Federal de Rondônia. III. Titulo
CDU 53 : 004
Bibliotecária: Marlene da Silva Modesto Deguchi CRB 11/ 601
II. Universidade
i
ii
DEDICATÓRIA
Dedico:
A Deus, a minha família, especialmente a
minha mãe, as minhas filhas, pela compreensão
necessária, aos meus amigos professores de Física
da UNIR-JP pelo apoio.
iii
AGRADECIMENTOS
Agradeço primeiramente a Deus por ter me dado a saúde e perseverança para concluir o
curso de especialização.
Ao professor Dr. Robinson Viana Figueroa Cadillo que me orientou neste trabalho,
estando sempre à disposição quando solicitado.
A todos os meus amigos e professores do departamento de física de Ji-Paraná, pelo
apoio na realização deste trabalho.
E aos colegas de turma, pela ajuda e pela companhia durante o curso.
iv
RESUMO
Observa-se que o grande avanço científico e tecnológico alcançado nas ultimas décadas se
deve a capacidade de processar os dados e adquirir com grande rapidez os resultados
esperados. O computador hoje faz parte da vida de todos nós e isso justifica a necessidade de
fazer da tecnologia a nossa aliada como recurso educacional. Desde esse contexto, este
trabalho tem por objetivo: 1- mostrar as possibilidades do uso do computador nos laboratórios
didáticos como instrumento de aquisição e processamento e de dados e também como um
instrumento de medida de grandezas físicas através da porta paralela. 2- Mostrar a utilidade
dos micro-controladores que pedem ser facilmente programados e utilizados tanto de pesquisa
como no controle dos instrumentos do laboratório. Com a finalidade de atingir esses
objetivos, foi usado como instrumento: a) Software desenvolvido em Visual Basic para a
leitura e processamento dos dados recebidos. b) Um circuito eletrônico para transformar o
sinal analógico em digital. Sensores de luz para a coleta de informação externa para análise no
computador. c) Um pêndulo simples para o estudo do Movimento Harmônico simples. Neste
trabalho foi analisado a amplitude e período oscilação de um pêndulo simples. Resultados
obtidos neste trabalho sugerem diferentes aplicações do circuito no estudo de outros temas da
física como movimento circular, queda livre, dinâmica, etc.
Palavras
chaves: Porta Paralela, micro-controladores, programação
v
ABSTRACT
It is observed that the great scientific and technological progress achieved in recent decades is
due to ability to process data very quickly and get the expected results. The computer is now
part of life for everyone and this justifies the need to make technology our ally as an
educational resource. From that context, this paper aims: 1 - show the possibilities of using
computers in the undergraduate laboratory as an instrument of acquisition and processing and
data and also as an instrument to measure physical quantities through the parallel port. 2 Show the usefulness of micro-controllers that require easily be programmed and used in both
research and control of laboratory instruments. In order to achieve these objectives, was used
as a tool: a) Software developed in Visual Basic for reading and processing of data received.
b) An electronic circuit to convert the analog signal to digital. Light sensors to gather external
information for computer analysis. c) A simple pendulum for the study of simple harmonic
motion. This work analyzed the oscillation amplitude and period of a simple pendulum.
Present results suggest different circuit applications in studying other subjects like physics
circular motion, free fall, dynamics, etc.
Key - words: Parallel, microcontrollers, programming
vi
LISTA DE ABREVIATURAS E SIGLAS
BIOS
Basic Input/Output System
CI
Circuito Integrado
CPU
Central Processing Unit
Digito Binário Bit Binary Digit
DLL
Dinamic Linking Library
DMA
direct memory access
ECP
Extended Capabilites Port
EPP
Enhanced Parallel Port
I/O
Input Output
LDR
Light Dependent Resistor
LED
Linght Emiting Diode
LTP
Line Print Terminal
PCB
Printed Circuit Board
PROM
(Programmable Read Only Memory
RAM
Random Access Memory
SSI
Small Scale Integration
SSP
Standard Parallel Part
Vcc
Common Collector Voltage
TTL
Transistor-Transistor Logic - Uma família de circuitos digitais
DTL
Diode transistor logic
DB25
Conector de 25 pinos da Porta Paralela
acesso directo à memória
vii
LISTA DE TABELAS
Tabela 1. Pinos da Porta 888.....................................................................................
25
Tabela 2 Valores dos pontos da reta de carga..........................................................
33
Tabela 3 Valores da tensão VB e da corrente IC do transistor.................................
34
Tabela 4 Valores dos 10 termos da série ..................................................................
41
Tabela 5 Erro cometido no cálculo do período de um pêndulo simples com =15°..
42
viii
LISTA DE FIGURAS
Figura 1
Micro controlador SN7400N
15
Figura 2.(a)
PORTA NOT
16
Figura 2.(b)
Circuito NOT
16
Figura 3
Porta AND
16
Figura 4.(a)
Porta OR
17
Figura 4.(b)
Circuito OR
17
Figura 5
Circuito TLL 7400.
18
Figura 6
Configuração dos pinos do Conector DB25.
21
Figura 7.(a)
Conector DB25 fêmea
21
Figura 7.(b)
Cabo da Impressora
21
Figura 8
Período de rotação num movimento circular.
29
Figura 9
Experimento para medir o período de rotação do motor
29
Figura 10.(a)
Elaboração da placa, (b) Placa principal
32
Figura 11
Diagrama do circuito
33
Figura 12
Funcionamento do transistor como chave aberta e fechada
34
Figura 13
Reta de Carga do Transistor. Os valores obtidos experimentalmente
36
Figura 14. (a)
pinos e (b) diagrama do circuito integrado SN74F244NP
37
Figura 15
Diagrama do projeto
39
Figura 16
Janela principal do Software
40
Figura 17
Pêndulo Simples
41
Figura 18
Gráfico do período de oscilação versus amplitude
43
Figura 19
Gráfico do Período oscilação em função de diferentes número de termos
da Série.
44
Figura 20
Gráfico dos Períodos com três funções de 0 a .
45
Figura 21
Gráfico dos Períodos com três funções de amplitude em
Figura 22
Esquema da Montagem experimental para obtenção dos dados.
46
Figura 23
Valores encontrados experimentalmente para o Período
46
rad
+
45
ix
SUMÁRIO
Capitulo 1: Introdução
11
Capitulo 2 Micro-controladores
12
2.1 Portas Lógicas
13
2.2 Portas Lógicas Básicas
15
2.3 Outros Circuitos As versões dos Circuitos TLL
16
Capitulo 3 Sistema de comunicação com a porta paralela
18
3.1 A porta paralela
19
3.2 Configuração dos conectores Conector DB25
20
3.3 Registradores da porta paralela
21
3.4 Comunicação com a Porta
22
3.5 Modo EPP e SPP
24
3.6 Interfaces de entrada e saída
25
3.7Aplicação da porta paralela para a física experimental
26
Capitulo 4: Desenvolvimento da Interface para analise dos dados
27
4.1 Ferramentas utilizadas nesta monografia
29
4.2 Elaboração da placa do circuito, procedimento
30
4.3 Placa Principal
31
4.3.1 Circuito
32
4.3.2 Transistor
32
4.3.3 Sensor LDR
35
4.3.4 Integrado SN74F244NP
36
4.4 aplicações da interfase em atividades experimentais de ensino de física.
38
4.4.1 Montagem do pendulo
39
4.4.2 O Solftware
39
4.4.3 O período do Pendulo Simples
40
4.4.4 Valores encontrados experimentalmente para o Péríodo
45
Capitulo 5: conclusões e recomendações
46
x
Blibiografia
47
APÊNDICES
48
Apêndice A - Publicação das Variáveis e Declaração da DLL
48
Apêndice B - Software para Captura de Dados
50
Apêndice C - Função para conversão Binário Decimal
51
Apêndice D - Função para Cálculo da Gravidade Terrestre
52
Apêndice E - Função para plotar o Gráfico
53
Apêndice F -Função Principal para Leitura e Captura dos dados
54
Apêndice G -Programa para calcular os termos da série
57
11
1. INTRODUÇÃO
O principal objetivo deste trabalho e justificar a importância, a necessidade e
exemplificar o uso do computador como instrumento de captura processamento e
análise de dados através da porta paralela que é a forma mais simples para a
implementação de programação e montagem de interfaces as outras portas também
podem ser usadas necessitando para isso instrumentos mais sofisticados necessária a
comunicação serial. A porta paralela é adequada porque transmite dados de forma
bidirecional sem necessidade de um protocolo de envio e recebimento de dados, sendo
necessária apenas a sua configuração para esse fim.
O computador é um importante instrumento de laboratório e pode ser usado
como instrumento de medida em experiências que envolvam medidas de tempo,
temperatura, luminosidade entre outros e também na aquisição e processamento de
dados em grandes quantidades em tempo real. O laboratório sempre foi para a Física um
importante instrumento de demonstração, ensino, pesquisa e sua modernização implica
a adequação dos equipamentos para que possam ser modificados e compreendidos e
assim melhor aproveitados de acordo com o planejamento feito pelos professores.
Parte da tarefa, muitas vezes tediosa, de coleta de dados também em um
laboratório didático, pode e deve ser transferida para as máquinas, como ocorre no
sistema produtivo. Isto possibilita que professores e alunos tenha mais tempo no
processo ensino aprendizagem para discussão dos aspectos físicos relevantes, como
modelos físicos e matemáticos, das grandezas físicas relevantes e suas relações. Podese, ainda, tratar de problemas mais reais e atuais, que de outro modo não seriam tratado.
O computador é útil, e muitas vezes imprescindível, para a previsão de resultados - via
modelagem computacional - e para medir - via aquisição automática de dados.
Modelagem computacional é um dos pilares fundamentais do desenvolvimento
científico atual. A física como ciência experimental deve fazer uso da modelagem
computacional tanto na pesquisa como no ensino inserindo nos laboratórios os recursos
computacionais.
Atualmente, a Física computacional possui atuação muito mais abrangente que a
tradicional. O conhecimento em Ciência e Engenharia da Computação são utilizados
12
como ferramentas para os avanços tanto em Física teórica como experimental, ao
mesmo tempo em que conceitos da Física são aplicados à Teoria da computação. Neste
trabalho descrevemos as possibilidades do uso da porta paralela do computador com a
finalidade de processar dados externos coletados através de cabos, usando sensores. O
uso de sensores está presente em muitos circuitos como Sistema de alarme para carros,
sistema de segurança residencial, controle remoto para abertura e fechamento de
portões, no laboratório pode ser usado para medir as grandezas físicas como
temperatura voltagem luminosidade tempo e como aquisição de dados. Eles podem ser
utilizados na coleta de informação para uma grande variedade de experiências em tempo
real e enviados para processamento via porta paralela, isso possibilita aos professores ou
pesquisador automatizar a coleta dos dados do mundo físico e processá-los no
computador através de programas desenvolvidos para esse fim, ou através dos Microcontroladores [1].
2. MICRO-CONTROLADORES
Os micro-controladores são chips inteligentes, constituídos por um processador,
pinos de entradas/saídas e memória. Através da programação dos micro-controladores,
podemos controlar suas saídas, tendo como referencia as entradas através de um
programa interno. O que diferencia os diversos tipos de micro-controladores é a
quantidade de memória interna, velocidade de processamento, quantidade de pinos de
entrada/saída (I/O), alimentação, periféricos, arquitetura e instruções. Um micro
controlador pode efetuar várias funções que necessitariam um grande número de outros
componentes. Assim aprender a programar micro-controladores significa aprender a
resumir circuitos em um único componente . Para suprir exigências de projetos, existe
uma ampla gama controladores disponíveis no mercado, diferenciando pelo número de
linhas de entrada/saída e pelos recursos de periféricos dos dispositivos [2].
13
MICRO-CONTROLADORES PIC
O pic pode ser visto externamente como um circuito integrado TTL ou CMOS
normal, mas internamente dispõe de todos os dispositivos típicos de um sistema microprocessado, ou seja: Uma CPU (Unidade de Processamento Central) e sua finalidade é
interpretar as instruções de programa; Uma memória PROM (Programmable Read Only
Memory ou Memória Programável Somente para Leitura) na qual ira memorizar de
maneira permanente as instruções do programa; Uma memória RAM (Random Access
Memory ou Memória de Acesso Aleatório) utilizada para memorizar as variáveis
utilizadas pelo programa; Uma serie de LINHAS de I/O (entrada e saída) para controlar
dispositivos externos ou receber pulsos de sensores, chaves, etc.[3], uma serie de
dispositivos auxiliares ao funcionamento como gerador de clock, etc. A presença de
todos estes dispositivos em um espaço extremamente pequeno, da ao projetista ampla
gama de trabalho e enorme vantagem em usar um sistema micro-processado, onde em
pouco tempo e com poucos componentes externos podemos fazer o que seria oneroso
fazer com circuitos tradicionais [4].
2.1 PORTAS LÓGICAS
Em 1854, o matemático inglês George Boole (1815
1864) representou um
sistema matemático de análise lógica conhecido como álgebra de Boole. Em 1938 o
engenheiro americano Claude Elwood Shannon utilizou as teorias da álgebra de Boole
para a solução de problemas de circuitos de telefonia em reles, praticamente
introduzindo na área tecnológica a eletrônica digital. Esse ramo da eletrônica emprega
em seus sistemas um pequeno grupo de circuitos básicos padronizados conhecidos
como portas lógicas. Todo circuito lógico executa uma expressão booleana, e por mais
complexo que seja, é formado pela interligação das portas lógicas básicas.
O computador, é formado por circuitos eletrônicos que armazenam sinais
binários. Circuitos digitais são formados por pequenos elementos capazes de manipular
14
grandezas binárias, portas lógicas, são elementos de hardware que recebe um ou mais
sinais de entrada e produz um sinal de saída, cujo valor é dependente do tipo de regra
lógica estabelecida para a construção do referido circuito. A CPU contém Memória
Principal, Dispositivos E/S e outros dispositivos são fabricados através da adequada
combinação de milhões de portas lógicas.
A importância dessas portas lógicas está no fato de representarem os elementos
básicos de construção da maioria dos circuitos digitais práticos. Quando se deseja
construir um circuito lógico (ou digital) relativamente simples, usa-se uma placa de
circuito impresso com soquetes sobre os quais se insere um circuito integrado (CI)
digital. A maioria dos CI's já é padronizada, e os mais comuns pertencem à série
denominada 7400. Os mais simples utilizam a tecnologia de Integração em Pequena
Escala (SSI - Small Scale Integration).
CARACTERÍSTICAS DAS PORTAS LÓGICAS
1. As estradas não estão limitadas a 2. Podem ter quantas entradas forem necessárias.
2. A saída é sempre única.
3. Os circuitos podem ser construídos pela combinação das portas lógicas.
4. Qualquer expressão booleana pode ser representada pela combinação de portas
lógicas.
5. Um mesmo circuito pode ser construído a partir de combinações de portas diferentes.
Figura 1. Micro-controladores SN7400N e sua respectiva configuração de pinagens.
15
2.2 PORTAS LÓGICAS BÁSICAS
PORTA NOT (NÃO)
A porta NOT inverte o sinal de entrada (executa a NEGAÇÃO do sinal de
entrada), ou seja, se o sinal de entrada for 0 ela produz uma saída 1, se a entrada for 1
ela produz uma saída 0.
Circuito NOT
Chave A aberta (0)
(a)
S= 1
Chave A fechada (1) S= 0
(b)
Figura 2. (a) PORTA NOT, (b) Circuito NOT
PORTA AND (E)
A porta AND combina dois ou mais sinais de entrada de forma equivalente a um
circuito em série, para produzir um único sinal de saída, ela produz uma saída um (1), se
todos os sinais de entrada forem iguais a um (1); caso qualquer um dos sinais de entrada
forem iguais a zero (0), a porta AND produzirá um sinal de saída igual a zero.
Figura 3. Porta AND
16
PORTA OR (OU)
A porta OR combina dois ou mais sinais de entrada de forma equivalente a um
circuito em paralelo, para produzir um único sinal de saída, ou seja, ela produz uma
saída 1, se qualquer um dos sinais de entrada for igual a 1; a porta OR produzirá um
sinal de saída igual a zero apenas se todos os sinais de entrada forem 0.
(a)
(b)
Circuito OR
CH A aberta (0) CH B aberta (0),
CH A aberta (0) CH B fechada (1),
CH A fechada (1), CH B aberta(0),
CH A fechada (1), CH B fechada (1),
S =0
S =1
S=1
S =1
Figura 4. (a) Porta OR, (b) Circuito OR.
2.3 OUTROS CIRCUITOS AS VERSÕES DOS CIRCUITOS TLL
A família TTL é derivada da família DTL, sendo o resultado de uma série de
inovações tecnológicas. Uma delas é a utilização nos seus circuitos internos de
transistores bipolares de vários emissores também conhecidos como multiemissores.
Trata-se de uma família pioneira, tradicional e muito utilizada ao longo dos anos,
devido principalmente ao seu fácil manuseio e à colocação no mercado de uma série de
circuitos integrados padronizados.
Além dos blocos comuns (Standard), a família TLL possui outras versões de
circuitos com a finalidade de atender a solicitações de ordem prática nos parâmetros
relativos à velocidade, consumo e potência. A família TTL colocou no mercado uma
série de circuitos integrados padronizados com configurações e pinagens disponíveis
nos manuais dos fabricantes. São circuitos integrados de 14 pinos ou mais conforme a
complexidade do circuito agregado, com encapsulamento denominados DIP (Dual-InLinePackage), cuja identificação da disposição dos terminais se faz através da vista
17
superior, em sentido ant-horário a partir do ponto de referencia colocado no pino 1
próximo do chafro existente no bloco, para exemplificar figura 5 apresenta a pinagem
do circuito integrado 7400 com 2 entradas sendo esta válida também para o 5400 de uso
militar e ainda para as versões 74L00, 74H00, 74S00, 74A00, 74LS00,74ALS00 de uso
comercial.
Figura 5. Circuito TLL 7400.
18
3. SISTEMA DE COMUNICAÇÃO COM A PORTA PARALELA
Uma das grandes vantagens do computador é poder interagir com o meio externo,
seja enviando um comando, ou coletando dados. Em pesquisas de física experimental o
computador pode ser uma ferramenta de aquisição e tratamento de dados. Essa
aquisição pode ser feita de várias maneiras, pois o computador oferece uma grande
quantidade de dispositivos para a entrada e saída de informações. Nos laboratórios
modernos são usadas interfaces específicas para cada tipo de trabalho, estas interfaces
são ligadas de maneira a coletar ou enviar dados de equipamentos com grande precisão
e velocidade.
Os sistemas operacionais da Microsoft nas versões XP, NT e 2000, implementam
uma política de segurança que impede o usuário de trabalhar diretamente com a porta
paralela, sendo necessário liberar o acesso para que projetos eletrônicos funcionem
devidamente. A configuração da porta pode ser feita mais facilmente usando programas
para fazer este trabalho neste trabalho foi usado o Userport, desenvolvido por Tomas
Franzon, que pode ser baixado no endereço www.eletronica.org/arquivos/userport.zip.
Passos para configuração da porta paralela:
1.
Baixar o arquivo UserPort.zip ;
2.
Descompacte o arquivo em um diretório (pasta);
3.
Copie o arquivo UserPort.sys para o diretório:
c:/windows/system32/drivers ou c:/winnt/system32/drivers para o Windows NT;
4.
Execute o programa UserPort.exe;
5.
Mude os endereços para 0x378-0x37A, clicando em "ADD".
6.
Remova os outros endereços com o botão "Remove".
7.
Clique em "Start".
19
3.1 A PORTA PARALELA
A porta paralela é uma interface de comunicação entre o computador e um
periférico, o qual permite enviar e receber dados. Esta transmissão de dados e sinais de
controle é feita através de impulsos elétricos transportados por condutores ( fios )
elétricos. Os dados são transferidos codificados em bytes, através de oito condutores
paralelos, cada um transportando um bit. Usando oito condutores para transportar cada
byte. Através da porta paralela permite-se enviar dados no modo unidirecional e no
modo bidirecional, ou seja, envia e recebe dados pelos mesmos condutores. As
interfaces capazes de executar este tipo de tarefa são conhecidas como interfaces de
entradas e saídas (E/S), ou Input/Output (I/O) a qual se descreve qualquer troca de
dados entre dois dispositivos. Um "dispositivo de E/S" é um periférico qualquer que
permite esta troca de dados. A vantagem das conexões paralelas é que com oito vias
para transportar dados simultaneamente, os bytes são transportados inteiros e não há
necessidade de circuitos complexos para reconstituí-los quando são recebidos. As
informações podem fluir rapidamente do computador para a impressora ou qualquer
outro dispositivo.
Embora na maioria das vezes a porta paralela seja usada para
conexão com a impressora, ela também pode ser usada para receber dados de
dispositivos externos, viabilizando sua utilização para diferentes tipos de aplicações,
como, por exemplo, controle de motor de passo, interligação entre computadores,
aquisição de dados, etc. A comunicação entre o software e a placa do circuito é feita
pelo cabo DB25
O interessante de uma conexão via cabo paralelo é a facilidade de execução isso
porque ela é padrão em qualquer PC. Em ambientes industriais ela utilizada também
para a comunicação dos mais diversos tipos de equipamentos micro processado devido
exatamente ao seu baixo custo de implantação. Por padrão, o endereço em hexadecimal
378h é o utilizado para a LPT1, isso não significa que esse endereço seja estático. Ele
pode ser mudado a qualquer momento, desde que se tenha noção do que se esteja
fazendo, pois, qualquer procedimento errado poderá gerar conflitos e o periférico ficar
inoperante.
20
3.2 CONFIGURAÇÕES DOS CONECTORES
Figura 6. Configuração dos pinos do Conector DB25.
(a)
(b)
Figura 7. (a) Conector DB25 fêmea, (b) Cabo da Impressora.
A conexão de qualquer equipamento à porta paralela é feita através do Conector
DB25. Esse conector é universal e contém 25 pinos. É através desse conector que se
estabelece a comunicação da porta paralela com interfaces conectadas a ela. No
Conector DB25, cada pino recebe um nome, que está relacionado ao Registrador que o
controla.
1- Os pinos 2 a 9, denominados, da esquerda para a direita, de D0, D1, D2, D3,
D4, D5, D6 e D7 são controlados pelo Registrador de Dados (saída de dados), e a letra
D indica isso. O número que vem após a letra corresponde à posição do pino dentro do
Byte.
2- Os pinos 10, 11, 12, 13 e 15, denominados S6
End, S4
Select Out, S3
Ack, S7
Busy, S5
Paper
Error, são controlados pelo Registrador de Status (entrada de
21
dados), e a letra S indica isso. O número que vem após a letra corresponde à posição do
pino dentro do Byte.
3- Os pinos 1, 14, 16 e 17, denominados C0
C3
Strob, C1
Auto Feed, C2
Init e
Select In, são controlados pelo Registrador de Controle da Porta Paralela (controla
a impressora, pode ser usado como outras 4 saídas), e a letra C indica isso. O número
que vem após a letra corresponde à posição do pino dentro do Byte.
4- Os pinos (18 a 25) são terra (Ground). Existem pinos na Porta Paralela que
trabalham com lógica invertida, isso quer dizer que quando queremos ativar esses pinos
temos que enviar um sinal lógico 0 e quando desejamos desativar, devemos mandar
um sinal lógico 1 .
3.3 REGISTRADORES DA PORTA PARALELA
A Porta Paralela possui três Registradores:
1- Registrador de Dados (Data Lines)
usado para enviar dados através da Porta
Paralela, parta 888.
2- Registradores de Entrada (Status Lines)
através desse registrador podemos
receber dados do mundo externo, porta 889.
3- Registrador de Controle (Control Lines)
a princípio tem a função de controlar
a impressora, mas pode ser usado para enviar dados para o mundo externo,porta 890.
Cada Registrador tem um endereço único, que não interfere nos demais. São eles:
Registrador de Dados: 888 ou 378h (em Hexadecimal), Registrador de Status: 889 ou 379h (em
Hexadecimal) e Registrador de Controle: 890 ou 37Ah (em Hexadecimal)
22
3.4 COMUNICAÇÃO COM A PORTA
Na comunicação em paralelo, grupos de bits são transferidos simultaneamente
(em geral, byte a byte) através de diversas linhas condutoras dos sinais. Desta forma,
como vários bits são transmitidos simultaneamente a cada ciclo, a taxa de transferência
de dados é alta. Aporta paralela tem 8 pinos para envio de dados (D0 a D7), 4 pinos para
controle (C0 a C3) e 5 pinos para entradas (S3 a S7), os restantes (18 a 25) são GND.
Alguns dos pinos têm um traço por cima do nome. Isto significa que esses pinos são
invertidos, ou seja, num pino normal como por exemplo o C2 se enviarmos o sinal 1
para esse pino, o seu valor é alterado para 1 o que quer dizer que está ativado, se
enviarmos o sinal 0, o pino é desativado. No caso do pino 3 como é invertido acontece o
contrário, se enviar o sinal 1, ele é desativado e se enviarmos o sinal 0 o pino é ativado.
Apesar de se dar o nome de Pinos de Dados aos pinos D0 a D7 e Pinos e Controlo aos
C0 a C3, ambos servem para enviar dados.
O computador dá o nome de LPT1, LPT2, etc., porta paralela. A LPT1 tem um
endereço para que possamos comunicar com ela. O endereço da LPT1 para envio de
dados através dos pinos D0 a D7 em hexadecimal é &H378 e em decimal é 888. Para
receber dados são &H379 em hexadecimal e 889 em decimal. A porta paralela possui 8
pinos de envio de dados e 5 de entradas, cada pino desses equivale a 1-bit o que quer
dizer que podemos enviar 8 bits e receber 5 bits ao mesmo tempo. Em binário um
número começa-se a ler da direita para a esquerda, por isso se tivermos o número
00000001 em binário e o enviarmos para a porta paralela para ativar os pinos de dados,
será o pino D0 a ser ativado. Se enviarmos 00000000, teremos todos os pinos
desativados, se enviarmos 11111111 teremos todos os pinos ativados. A comunicação é
feita através de uma DLL para podermos comunicar com a porta paralela.
c:\windows\system32 .
23
DECLARAÇÃO DA DLL
Private Declare Function Inp Lib inpout32.dll _
Alias Inp32 (ByVal PortAddress As Integer) As Integer
Private Declare Sub Out Lib inpout32.dll _
Alias Out32 (ByVal PortAddress As Integer
ByVal Value As Integer)
Depois de termos declarado a DLL temos 2 comandos, Inp e Out. Inp serve para
receber dados da porta paralela, Out serve para enviar dados para a porta paralela.
Exemplo do comando para recebermos dados: dim varInput as integer; varInput =
Inp(889), o valor das entradas fica armazenado na variável varInput. Inp é o comando e
889 é o endereço da LPT1 para as entradas. Para saber quais as saídas, pinos de dados
(D0 a D7) que temos ativadas e desativadas devemos trocar o endereço para o endereço
das saídas: dim varOutput as integer varOutput = Inp(888) Instrução Out envio de
dados.
Para enviar dados através da porta paralela utiliza-se o comando Out seguido do
endereço da porta Out 888 onde 888 é o endereço dos pinos de dados da LPT1. Por
exemplo se quiser ativar todos os pinos de dados da porta paralela: Out 888, 255, Para
desativar todos: Out 888, 0 os valores enviados a porta devem estar em decimais para
ativar e desativar os pinos da porta paralela. Isto acontece porque esta DLL trabalha
com números decimais. Portanto se quisermos ativar o pino D0, teremos de dar á DLL o
valor 1 e não 00000001 e se for o pino D1 enviamos o valor 2 e não 00000010
e se for o pino D2 enviamos o valor 4 e não 00000100 .
Pino
D0
D1
Valor Binário
00000001
00000010
Valor Decimal
1
2
24
D2
00000100
4
D3
00001000
8
D4
00010000
16
D5
00100000
32
D6
01000000
64
D7
10000000
128
Tabela 1. Pinos da Porta 888
Com o método Out Endereço, Valor conseguimos enviar dados através da porta
paralela, por exemplo: Out 888, 1 , o pino D0 é ativado Out 888, 2 , o pino D1 é
ativado e o pino D0 é desativado. Se for preciso que o pino D0 continue, devemos
buscar o valor que já esta na porta paralela, ou seja, os pinos que já estão ativados, neste
caso é o pino D0 que nos retornaria o valor 1 e em seguida somarmos o valor do pino
ou dos pinos que queremos ligar, neste caso o valor 2 e seria enviado o valor 3 que
ativaria o pino D0 e o pino D1.
As entradas da porta paralela são ativadas através de sinal negativo, ou seja,
quando são ligadas ao GND são ativadas. Como as entradas são sensíveis é melhor
utilizar-se uma proteção para que não queimemos a motherboard.
3.5 MODOS SPP, EPP E ECP
O modo que tem um a melhor taxa d e transferência é o ECP. Esse modo de
operação é um avanço sobre o modo EPP, aumentando significativamente a taxa de
transferência da porta paralela. O modo utilizado para implementação do projeto foi o
ECP. O modo EPP, tem velocidade semelhante ao ECP, porém com menos recursos.
Geralmente, configuramos a porta paralela com ECP, pois este traz várias vantagens
25
sobre os outros modos, como o uso de um canal de DMA, que diminui a taxa de
ocupação do processador durante as transferências de dados.
EPP (Enhanced Parallel Port), é um modo bidirecional que utiliza 8 vias para
enviar e receber os dados. São enviados ou recebidos 8 bits (1 byte) de cada vez. Para
controlar a direção dos dados, é necessário manipularmos o Bit 5 (C5) do byte do
REGISTRADOR DE CONTROLE. De imediato, ao ativarmos o modo EPP para
leitura, alterando o bit5 do Registrador de Controle para 1 (um), todos os bits do
Registrador de Dados estarão no nível lógico alto 1 (um), portanto, para enviarmos
dados através desse registrador devemos mandar sinais aos pinos (D0...D7) no nível
lógico baixo 0 (zero). Nesse caso, a porta trabalhará com lógica invertida.
ECP (Extended Capabilites Port) esse modo de operação é um avanço sobre o
modo . EPP, aumentando significativamente a taxa de transmissão da porta, tem dois
endereços distintos, um par a escrever e outro par a ler dados. Podemos observar o
endereço do dispositivo de entrada e saída configurado através da BIOS (Basic
Input/Output System) do PC ou no gerenciador de dispositivos do Windows [5]. A partir
do PENTIUM 100mhz, o hardware de controle da Porta Paralela está onbord (já incluso
na própria placa mãe).
As portas paralelas, encontradas nas placas mãe modernas, podem trabalhar em
diferentes modos de operação. É possível configurar qual será usado no setup, onde
geralmente estão disponíveis as opções: Normal, Bidirecional, ECP e EPP. Os modos
Normais e Bidirecionais são bem mais lentos. A diferença entre eles é que o modo
Bidirecional permite comunicação bidirecional. O modo ECP é mais rápido, sendo
usado por impressoras um pouco mais modernas, além de ser compatível com a maioria
dos Scanners, Zip Drives e outros dispositivos que utilizam a porta paralela.
3.6 INTERFACES DE ENTRADA E SAÍDA
Interface de entrada consiste de uma placa de circuito eletrônico que recebe o
sinal dos sensores um fotodiodo ou LDR, que possui resistência variável com incidência
26
da luz e uma fonte de luz que pode ser uma lâmpada ou um laser. Quando o feixe de luz
incide sobre o fotodiodo o circuito envia um sinal de +5V para uma das entradas da
porta paralela. Se o feixe é interrompido o circuito envia um sinal de 0V. Estes sinais
formam um pulso lógico interpretado pelo programa como 0 e 1. Podemos com essa
lógica montar várias experiências para receber dados como medidas de tempo,
velocidade, ângulos, etc.
3.7 APLICAÇÕES DA PORTA PARALELA PARA A FÍSICA EXPERIMENTAL.
A possibilidade de aquisição automática de dados usando o computador em
experiências de laboratórios é uma proposta importante para a aprendizagem e pode ser
praticado em diversas áreas da Física principalmente em Mecânica, Termologia,
Eletromagnetismo e Ondulatória. A implementação de tais sistemas em escolas de
ensino médio e mesmo em muitas universidades, entretanto, não tem ocorrido. Em parte
isto se deve inexistência de laboratórios equipados e pela falta de pessoal capacitado
para implementação dessa tecnologia. A utilização do computador e da porta paralela
em interfases eletrônicas necessita de três elementos básicos:
1) Sensores, como microfone, LDR, termistores, foto-transmissor, entre outros.
Estes sensores têm como característica comum o fato de que varia sua resistência como
conseqüência da variação de alguma grandeza física (intensidade sonora, intensidade
luminosa, temperatura).
2) Interface que transforma o sinal analógico em digital. Nos sistemas comerciais
costuma ser uma caixa-preta. Mais recentemente a própria placa de som do
microcomputador tem sido utilizada como interface analógico/digital. Outras
possibilidades incluem a porta paralela e o mouse.
3) Software que lê e registra os dados. Estes softwares podem gerar, como
preferimos, simplesmente um arquivo de dados, com os valores da resistência em
função do tempo, cabendo ao estudante interpretar os dados em uma planilha eletrônica.
Nos sistemas comerciais os softwares usualmente apresentam várias alternativas para
27
apresentação dos dados, como tabelas, gráficos e inclusive a possibilidade de cálculos
estatísticos.
Também entendemos que o computador deve ser utilizado como instrumento de
medida quando se investiga fenômenos que requeiram tamanha freqüência de medidas
que a coleta manual é impossível, para se obter maior precisão nas medidas. Em
qualquer destes casos uma das vantagens da aquisição automática, é que os dados já
ficam organizados na forma digitalizada, agilizando o processo de tratamento estatístico
e confecção de gráficos.
4. DESENVOLVIMENTO DA INTERFACE PARA ANALISE DOS DADOS
Neste trabalho a proposta e construir um circuito capaz de capturar e processar os
dados produzidos por sensores pela porta paralela. Um programa de computador
desenvolvido na linguagem Visual Basic será responsável pelo processamento dos
pulsos recebidos dos sensores e efetuar os cálculos, plotar gráficos e armazenar os dados
para futuras análises. O software também é o responsável pela comunicação com a porta
através das instruções Inp(PortAddress) e Out(PortAddress). Todo o processo de
interação entre o software com o dispositivo exterior ocorre em tempo real via porta
paralela. A leitura dos dados é feita através do endereço 0x379h; pinos: 10, 11, 12, 13 e
15 do DB25.
O acesso é feito pelo programa no endereço decimal Inp(889). O endereço
0x379h contém 01111000, o bit mais significativo desse byte é 0 (zero). Para fazer um
software que reconheça o estado de cada bit, é necessário sabermos como ele se
encontram atualmente. Para verificar se o bit 3 ou bit 7, receberam um sinal da porta,
estes deverão alternar seus estados de 1 (um) para 0 (zero).
O objetivo é montar um circuito fotoelétrico muito simples com poucos
componentes eletrônicos, contendo como elementos principais: um software, um
circuito eletrônico e sensores. O propósito é enviar sinais elétricos de 0V ou +5V ao
computador, o qual será convertido pela interface em sinal lógico 0 e 1. Neste projeto
foi um LDR como receptor o LDR é um dispositivo eletrônico que tem a propriedade de
28
aumentar sua resistência quando com a interrupção da luz incidente sobre ele. A placa
de circuito desenvolvida no projeto tem a função de transformar essa variação de
resistência em sinal digital e enviar a porta paralela que será lida pelo software. A
freqüência de leitura da porta 889 pelo software é de 10-3 (0,0016) s responsável em
capturar e processar os dados recebidos.
A aplicação da interface descrita neste trabalho é de propósito geral e tem
inúmeras possibilidades de utilização nos laboratórios didáticos. A figura 8 e 9, mostra a
coleta de dados de um motor de corrente contínua CC pela interface desenvolvida neste
trabalho. Os dados foram coletados fazendo circular um disco com uma fenda colocada
no caminho da luz entre o laser e o LDR. Foi usado um potenciômetro com a finalidade
de variar a velocidade do motor, através da variação da tensão fornecida a ele, o pico no
gráfico corresponde à diminuição da velocidade de rotação do motor.
Figura 8. Período de rotação num movimento circular.
Figura 9. Experimento para medir o período de rotação do motor.
29
4.1 FERRAMENTAS UTILIZADAS NESTA MONOGRAFIA
1 Placa de circuito fenolite (8 x10) cm;
1 Conector tipo RJ11 4 X 4 fêmea;
1 Folha de papel fotográfico tamanho A4;
1 frasco de álcool 500 ml;
Palha de aço;
Percloreto de ferro;
1 circuito integrado modelo 74HC244;
3 resistores de 0,38 KW;
2 resistores de 9,8 KW;
1 transistor BC 548;
1 Fonte de alimentação 6,3V CC;
2 Conector tipo RJ11 4x4 macho;
1 Estrutura com suporte universal para o pêndulo;
1 led vermelho 4,5 V;
2 led amarelo 4,5 V;
1 Sensor LDR;
1 Capacitor Eletrolítico;
30
4.2 ELABORAÇÃO DA PLACA DO CIRCUITO, PROCEDIMENTO.
MATERIAIS NECESSÁRIOS
uma impressora laser;
folhas de papel a4 tipo "photopaper
ferro passar roupa.
o percloreto de ferro.
O primeiro passo é ter o desenho do circuito impresso, isso pode ser feito através
de um software de desenho de placas. O segundo passo é obtenção da placa de fenolite
de 15cm x 10cm.A foto abaixo mostra um pedaço desta placa em cima de uma folha de
glossy paper.
Imprimir o desenho do circuito impresso no glossy paper, usando uma
impressora laser. Levando em conta a inversão necessária no desenho.Observar também
para a resolução do desenho, quanto maior a resolução, melhor. Após a impressão o
papel pode ser cortado. Fazer a impressão no centro da folha, a placa cobreada deve ser
bem limpa com Álcool para remover todo o óxido cúprico e gordura.
Impressão do circuito na placa, a face impressa deve estar voltada para a placa, e
fixada com fita isolante. Aplicar o ferro com o termostato na posição 5 sobre o papel, a
placa absorve boa parte do calor. O toner da impressão mais o glossy do papel são
transferidos para a placa. O tempo necessário para o contato com o ferro e de
aproximadamente 3 minutos. Após ser esfriada a placa, o papel que encobre a placa
pode ser removido. A placa, agora, está praticamente pronta para ser corroída. Para
fazer a correção, usar uma caneta para retroprojetor
O próximo passo é colocá-la num recipiente de plástico ou vidro e fazer a
corrosão com o percloreto de ferro em água corrente, o produto não é um ácido, mas
pode manchar profundamente a pele. Encha o recipiente de forma a cobrir
completamente a placa. A corrosão demorará de 15 a 30 minutos, dependendo da
temperatura do ambiente, temperatura do percloreto, se há agitação no recipiente, etc.
31
Este método é quase tão bom quando mandar fazer a placa em escala industrial,
onde é utilizada geralmente uma tinta fotossensível para formar o desenho antes da
corrosão. Um rocesso bastante caro [6].
Neste trabalho,foi usado o procedimento padrão para confecção da placa e o
programa utilizado no desenho foi o Express PCB Versão 7.0.2
4.3 PLACA PRINCIPAL
Figura 10. (a) Elaboração da placa, (b) Placa principal
32
4.3.1 diagrama do circuito eletrônico
Figura 11. Diagrama do circuito
O circuito foi desenvolvido para usar uma fonte de tensão de 6,3 volts e 0,5mA. Ele tem
a função de Converter o sinal analógico do sensor em digital para ser captado pela porta
paralela.
Cálculo da corrente máxima e mínima na base do transistor
IBmin
VBB
RB
6,3
98000
0,068mA
IBmax
6,3
100
63mA
4.3.2 transistor
As situações de corte e saturação de um transistor são impostas pela polarização,
ou seja, são obtidas em função do correto dimensionamento de Rc e Rb, e pela variação
do ponto de trabalho em função da tensão aplicada entre base e emissor do transistor.
O transistor comportar-se-á como chave aberta quando aplicamos um potencial 0
ou negativo na entrada E. Neste caso, operará na situação de corte, pois estaremos
aplicando corrente 0 á sua base, sendo a tensão na saída do circuito igual ao potencial da
fonte (+Vcc).
33
Analogamente, o transistor comportar-se-á como chave fechada quando
aplicamos um potencial positivo nesta mesma entrada. Nesse caso, operará na saturação
e a tensão entre coletor e emissor cairá para 0,3V no máximo, resultando assim em uma
baixa tensão (VS = 0,3V), sendo considerada como nível 0.
A figura 12 ilustra as situações de corte (a) e de saturação (b) do transistor NPN.
Figura 12. Funcionamento do transistor como chave aberta e fechada
O transistor usado no circuito foi o BC328, a figura15 mostra a operação do
transistor, os dados foram obtidos experimentalmente, mostrando que o transistor
funciona com uma tensão de joelho de 0,7V IB. A tensão de core do transistor é de 1,5V.
Observa-se que uma para uma voltagem na base menor que 0,7V o transistor não
conduz corrente IC
ambiente é de
0 portanto está em corte. O valor da tensão da base IB com a luz
0,12V. A determinação da reta de carga é feita com o auxílio de dois
pontos, o ponto de saturação e o ponto de corte. Quando a corrente na base é grande
intensa a tensão VCE reduz-se aproximadamente a zero, este ponto indica a máxima
corrente do coletor possível no circuito. O ponto de corte diz respeito ao máximo valor
possível de tensão VCE, nestes casos pode conceber-se o transistor como um circuito
aberto entre coletor e emissor..
As curvas características de saída do transistor relacionam as variáveis IC e VCE
pela Equação VCE=VCC-ICRC (1).
Se a tensão da base for menos 0,3V, o transistor se comporta como uma chave
aberta portanto está em corte, tensão máxima e corrente = 0. O segundo ponto da reta de
carga é: (VCE=VCC-0, IC=0).
34
Se a tensão da base for maior que 0,7V o transistor está funcionando como uma
chave fechada, se a corrente IC aumentar muito ele estará saturado, e a tensão VCE cai
para
0, neste caso temos IC máxima,vce =0. Este valor determina o primeiro ponto da reta
de carga. Pela equação (1) temos: 0=VCC-RCIC. O primeiro ponto será definido por
IC )
VCC
. Assim a reta de carga tem os seguintes valores [7]:
RC
IB
CORTE
IB
ATIVO
0,7V
0,7 V
I B 1,5V
IB 1,5V
VCE
VCE
IC )
VCE VCC
0
VCC
RC I C
0
SATURADO
0 VCC
IC
RC I C
VCC
RC
Tabela 2 Valores dos pontos da reta de carga.
O ponto de corte diz respeito ao máximo valor possível de tensão VCE, nestes
casos pode conceber-se o transistor como um circuito aberto entre coletor e emissor.
IC
0
VCE ( CORTE )
Vb (V) Ic (mA)
0,2
0,000
0,3
0,065
0,4
0,130
0,5
0,500
VCC
35
0,6
0,800
0,7
1,500
0,8
4,000
0,9
10,000
1,0
17,000
Tabela 3 Valores da tensão VB e da corrente IC do transistor.
VCC / RC (mA)
15
IC
10
5
0
0,2
0,4
0,6
0,8
VCC = VCE
1,0
(V)
Figura 13 Reta de Carga do Transistor. Os valores obtidos experimentalmente
4.3.3 Sensor LDR
LDR, é um resistor que muda a resistência com a variação da intensidade da luz
incidente. A variação de resistência do escuro para o claro é tipicamente de alguns mega
ohms para algumas centenas de ohms, essa variação não é linear. A grande vantagem do
36
LDR em relação aos outros componentes fotossensíveis reside no fato de não ser
polarizado, podendo ser usado em corrente alternada. A desvantagem é o tempo de
resposta muito grande, dependendo da intensidade média de luz sobre o LDR, o que
limita sua faixa de funcionamento a algumas centenas de Hertz.
A variação da resistência do LDR medido experimentalmente foi de
13k
do
escuro para o claro. Como o LDR está ligado em paralelo com o resistor da base de
9,8k
isto significa que a base tem uma resistência máxima dada pelo resistor da base
R1 e uma resistência mínima dada pelo LDR. Na presença da luz, o valor da tensão da
base é máxima e seu valor é 4,26V dependendo da intensidade da luz, o sinal de saída
é 0V.
Malhada entrada E - Vab Vbc Vcd
0
Na ausenciade luz no LDR os valoresexperimentais são :
Com a insidenciada luz no LDR os valores são :
Vab
0,58V
Vbc
0,58V
Vcd
5,16V
Vab
2,7V
Vbc
0,58V
Vcd
3,1V
Na primeira situação, o transistor está em corte Vab
na região ativa Vab
0,58 0,58 5,16 6,32V
2,7 0,58 3,1 6,32V
6,38V
0,58V e na segunda situação esta
2,7V . Isso mostra que o transistor está em corte na ausência da luz
e ativo, com a incidência da luz no LDR.
Com a interrupção da luz o LDR, a tensão da base baixa para valores próximos a
0V, isso faz o transistor ficar em corte e um sinal de 5,0V do CI e enviado a porta que
interpreta o valor como 0V. Quando a luz incide no LDR, a tensão na base do transistor
de
2,7V neste caso há queda na tensão de saída para valores próximos de 0V e o valor
recebido do CI pela porta é 1.
4.3.4 integrado SN74F244NP
(a)
(b)
Figura 14. (a) pinos e (b) diagrama do circuito integrado SN74F244NP.
37
Descrição: CI BUFFER não inversora, DIP-20 Tampão Tipo: não inverte Faixa
da Tensão de: 4.75V para 5.25V Case Logic Estilo: DIP N º de Pinos: 20 Temperatura
de operação: 0 ° C a +70 ° C Processo Leaded compatível: O 'F244 é organizado como
dois buffers de 4 bits / linha condutores com saída separada permitir (OE) entradas.
Quando OE é baixo, o dispositivo transmite dados a partir da entrada A para a saída Y.
Quando OE é alto, as saídas estão em estado de alta impedância. O SN54F244
caracteriza-se por operação na faixa de temperatura militar de -55 ° C a 125 ° C. O
SN74F244 se caracteriza por operação
Neste círculo a função do integrado e manter o valor da saída fixo 0V ou 5V isto
porque o valor da entrada varia de acordo com a luminosidade da luz incidente no LDR.
Ocasionando uma variação na tensão do transistor para valores de entrada maiores de 2
V o integrado mantém uma saída de 5V para valores menores de 2V, o integrado
mantém uma saída de 0V funcionando como porta lógica e o sinal analógico e
convertido para sinal digital.
38
4.4 APLICAÇÕES DA INTERFASE EM ATIVIDADES EXPERIMENTAIS NO
ENSINO DE FÍSICA: PÊNDULO SIMPLES
Figura 15. Diagrama do projeto
Existem várias aplicações dos sensores para a obtenção de dados pelo
computador tais como: contador de objetos ou pessoas, utilizando uma interface com
foto-transistor, Leitura de ângulos com a utilização de potenciômetros, medidas de
temperatura, medida de tensão elétrica ou corrente elétrica, através de conversor
analógico digital, medidas de velocidade e tempo com sensores de luz ou fototransmissor e acionamento automático de dispositivo através de reles, empregados como
elemento de disparo em acionamento de experimentos em física experimental.
O objetivo da aplicação é determinar o período de um Pêndulo simples usando a
interface desenvolvida. Neste trabalho foi desenvolvido um programa em Visual Basic
cujo objetivo é processar os dados recebidos em tempo real. O sensor usado foi um
LDR à luz ao ser interrompida por um pela passagem do pêndulo faz com que ele envie
um sinal para a placa principal este sinal muda a tensão na base do transistor que tem a
função de chaveamento, o transistor se encontra em corte ao receber uma tensão maior
pela passagem da corrente no LDR, entra a região ativa enviando um valor entre 2,0 a
5,0 volts para o integrado que uma porta lógica o integrado terá a função de converter o
sinal analógico do transistor em digital 0 ou 1 sendo (0 a 2) V = 0 (2 a 5) V =1. A
função do software desenvolvido é fazer a leitura da porta paralela, processar os dados
recebidos das oscilações do Pêndulo, calcular o período e fazer o gráfico de (P x T)
pulsos x período. A leitura da porta 889 pelo programa é feita com uma freqüência de
39
103 Hz ou suja o tempo entre as leituras é de 0,0016s, isto significa que a margem de
erro é menor que 10-3s
4.4.1 Montagem do Pêndulo
O Pêndulo foi montado usando um suporte universal de metal de 0,5m de altura.
Em sua parte foi acoplado o sensor de luz. O pulso produzido pelo LDR enviado para a
placa a é amplificar e transformado em num sinal digital, este sinal é captado pela porta
paralela 889 (S3 a S7) e GND através do conector DB25. O Software faz então a leitura
continua da porta 889 com uma freqüência de 1k Hz ou seja 1000 leituras /s, o tempo de
cada leitura é de aproximadamente 0,0016s.
4.4.2 o software
Figura 16. Janela principal do Software
O software foi desenvolvido exclusivamente para este trabalho ele usa uma
função de conversão binário /decimal, a DLL para o acesso a porta, três variáveis
atribuídas ao tempo (t2,t1,dt) e o objeto timer para a contagem do tempo. Para cada
leitura feita pela instrução Inp(port 889) o valor dt=(t2-t1) é calculado. A velocidade de
atualização desses dados e de 103 s
40
4.4.3 O período do pêndulo simples
O pêndulo simples é um corpo ideal que consiste de uma massa puntiforme
suspensa por um leve fio inextensível. Quando afastado de sua posição de equilíbrio e
largado, o pêndulo oscila em um plano vertical, sob a ação da gravidade. O movimento
é periódico e oscilatório.
Desde que as forças amortecedoras não reduzem a amplitude de oscilação, o
período permanece muito aproximadamente inalterado. Em um relógio de pêndulo a
energia é fornecida automaticamente por um mecanismo de escapamento que compensa
perdas devido ao atrito. O Pêndulo simples proporciona também o método conveniente
para medir o valor da aceleração da gravidade g.
Figura 17. Pêndulo Simples
As forças que atuam em um pêndulo são: a força peso mg, e a tração do fio T. O
sistema de referência no Pêndulo é tal que um dos eixos é tangente a trajetória1 circular
percorrida pela massa m e o outro tem a direção do fio, e do raio do circulo.
Decompondo mg segundo esses eixos, o módulo da componente radial será
mg cos( ) e da componente tangencial será mg sen( ) . A resultante das forças radiais
origina as força centrípeta necessária para manter massa na trajetória circular. A
componente tangencial de mg constitui a força restauradora que atua em m e faz o corpo
tender a voltar à posição de equilíbrio. A força necessária será portanto
41
F
mg sen( ) (1) . Esta força não é proporcional ao deslocamento angular
e sim a
sen( ) . O movimento resultante, portanto, não será harmônico simples. No entanto
for pequeno, lim
se o ângulo
sen
1 , sen( ) será aproximadamente
0
em radianos).
2
C
2
2 r
S
S
S
r se S x, x L
O deslocamento ao longo do arco é x
l*
e para pequenos ângulos, o
movimento será praticamente retilíneo. Portanto, supondo sen( )
F
mg
mg
x
l
mg
x
l
(medido
pode se escrever:
(2) . Se os deslocamentos forem pequenos, a força
restauradora será proporcional ao deslocamento e terá o sentido oposto, o que constitui a
característica fundamental do movimento harmônico simples. A constante mg / l
desempenha o função da constante k na equação F
kx (3) .
O período de um pêndulo simples, quando a amplitude for pequena, é:
T
2
m
k
m
mg / l
2
ou
2
l
g
(4).
Observa-se que o período é independente da massa da partícula suspensa. Quando
a amplitude de oscilação não é pequena, pode ser demonstrado que a equação geral do
período é dada por:
O ângulo
m
T
2
l
1
g
1
sen 2 m
22
2
1 32
*
sen 4 m
22 42
2
...
(5)
é o deslocamento angular máximo e os termos seguintes tornam-se
cada vez menores o período pode então ser calculado com o grau de precisão
necessário, tomando-se um número suficiente de termos da série. Quando
m
=15°,
correspondente ao deslocamento angular total de 30°, o período verdadeiro difere do
que é previsto pela equação (4) em menos de 0,5%. Lembrando que 1°= 0,01745 Rad e
360°= 6,282 Rad [8].
42
1,290
T0 = 2 * PI * Sqr(L / G)
T5=T0 * (T1 + T2 + T3 + T4 + T5)
1,285
Período T (s)
1,280
1,275
1,270
1,265
1,260
1,255
1,250
0
5
10
15
20
25
30
35
Amplitude A (em graus)
Figura 18. Gráfico do período de oscilação versus amplitude.
A equação (5) pode ser deduzia para a forma:
(6)
Onde k= sen
A
2
e T0 é o período das pequenas oscilações dado por (4). A fórmula (6)
mostra que o período do pêndulo depende da amplitude A. O primeiro termo da série
representa a aproximação de pequenas amplitudes obtida anteriormente. Os demais
termos são correções a esta aproximação [9].
Considerando
m
=15°,
k=0,32514392,
valores dos dez termos da série (6) são:
T0
1,256 s
T1
0,170909 s
T2
0,065722 s
T3
0,031201 s
T4
0,016331 s
L=0,4m
eT
2
0 ,4
10
1,25600000 s. Os
43
T5
0,009043 s
T6
0,005195 s
T7
0,003062 s
T8
0,00184 s
T9
0,001122 s
T10 0,000692 s
Tabela 4 Valores dos 10 termos da série
T
T0 ( 1 t1 t 2 t 3 t 4 t 5 t 6 t 7 t8 t 9 t10 ) 1,639227s
1,7
Período T (s)
1,6
1,5
1,4
1,3
1,2
2
4
6
8
10
Termos da série
Figura 19. Gráfico do Período de oscilação em função de diferentes números de termos da Série.
44
Período do pêndulo (s)
2,00
T0 = 2 * PI * Sqr(L / G)
T1 = 3 termos
T2 = 5 termos
1,75
1,50
1,25
0,00
1,57
3,14
rad
Figura 20. Gráfico dos Períodos com três funções de 0 a .
Período T0
T3
T5
T (s)
2,0
1,5
0,00
6,28
12,56
18,84
Amplitude em
25,12
31,40
rad
Figura 21. Gráfico dos Períodos com três funções de amplitude em
rad
+
Através dos cálculos observa-se que o erro cometido no cálculo do período de um
pêndulo simples, quando se usa um ângulo
= 15° graus e menor que 5 milésimos de
segundo como mostra a Tabela 5.
Rad
Grau
Amplitude (cm)
Erro (T3-T0)
0,27
15,4781019679452
8,00194341086913
0,00574
Tabela 5 Erro cometido no cálculo do período de um pêndulo simples com
=15°.
45
4.4.4 Valores encontrados experimentalmente para o período
Figura 22. Esquema da Montagem experimental para obtenção dos dados.
Período T em (s)
2
1
0
20
40
60
80
100
Sequência dos pulsos em (ms)
Figura 23. Valores encontrados experimentalmente para o Período
O pêndulo usado no calculo experimental tinha comprimento L
usando a Equação (4) para o calculo do período temos:
T
2
conferindo com o resultado experimental mostrado no gráfico.
m
k
2 * 3,14
0,4m portanto
0 ,3
9 ,8
1,2687 s
46
5. CONCLUSÕES E RECOMENDAÇÕES
Ao longo dos anos os laboratórios didáticos das escolas brasileiras sofreram um
retrocesso. Enquanto as tecnologias que permeiam a nossa sociedade evoluem em ritmo
galopante, muito laboratório didático não dispõe de microcomputadores e, quando
existem, pouco uso é feito em modelagem e aquisição de dados. A primeira avaliação
das condições de oferta dos cursos de graduação de Física (MEC, 2000) mostrou que
apenas 3% dos cursos de Licenciatura em Física tinham laboratórios e equipamentos em
boas condições.e pouco tem sido feito para equipar os laboratórios existentes. Isso é
preocupante porque indica que o professor de Física que tem ingressado no mercado de
trabalho não está sendo bem preparado para explorar os laboratórios de Física [10].
O trabalho apresentado teve por finalidade contribuir para uma maior valorização
dos laboratórios didáticos como instrumento de aprendizagem e como incentivo tanto ao
uso dessa tecnologia como no desenvolvimento dessa inovação no meio acadêmico.
Com vista a esse desenvolvimento é necessário: Introdução do curso de eletrônica
básica nos projeto pedagógicos de licenciatura para dar suporte em termos de
conhecimento básico e tecnológico aos futuros professores de física. E importante
também alem do uso do computador como instrumento didático, a criação de oficinas
para montagem e reparos de instrumentação para os laboratórios didáticos
experimentais de física, essas oficinas alem de servir para a manutenção dos
laboratórios servem principalmente como ambiente de aprendizagem e inovação.
47
BIBLIOGRAFIA
[1] CAVALCANTE, M. A.; TAVOLARO, C.R.C.
Projete você mesmo -
experimentos assistidos por computador: Revista Brasileira de Ensino de Física, São
Paulo, v. 22, n. 3, p. 421-425, 2000.
[2] Anais do XXXIV COBENGE. Passo Fundo: Ed. Universidade de Passo Fundo,
Setembro de 2006.
[3] Revista Brasileira de Ensino de Física
São Paulo, v. 24, n. 2, p. 77-86, 2002.
[4] Anais do XXXIV COBENGE. Passo Fundo: Ed. Universidade de Passo Fundo,
Setembro de 2006.
[5] A Porta Paralela ROGERCOM - Antonio Rogério Messias - Arquivo capturado em
12 de maio de 2010.em: http://www.rogercom.com/pparalela/introducao.htm
[6] Fazendo suas placas de circuito impresso Arquivo capturado em em 20 de junho
de 2010 no endereço http://www.geocities.com/jf_moreira/pcb.html
[7] Porta Paralela (TORRES, 2001) . R. FARN, Natal, v.2, n.l, p. 103 - 114, jul./dez .
2002
[8] BOYLESTAD, Robert L. & NASHELSKY, Louis. Dispositivos Eletrônicos e
Teoria de Circuitos.
LTC Livros Técnicos e Científicos Editora. ISBN 85-7054-076-0. Sexta Edição.
Capítulos: 1, 2, 3, 4, 5,6, 7, 8, 9, 12, 19 e 20.
[9] R. Resnick e D. Halliday, Física 2, 3ª edição, Livros Técnicos e Científicos Editora
S.A, São Paulo1983.
[10] CAPUANO, Francisco Gabriel, Elementos de Eletrônica Digital, 40ª edição. Ed.
Érica Ltda . São Paulo 2008.
48
APÊNDICES
APÊNDICE A
PUBLICAÇÃO DAS VARIÁVEIS E DECLARAÇÃO DA DLL
Variáveis e constantes são os elementos básicos que um programa manipula.
Uma variável é um espaço reservado na memória do computador para armazenar um
tipo de dado determinado. Elas devem receber nomes para poderem ser referenciadas e
modificadas quando necessário. Muitas linguagens de programação exigem que os
programas contenham declarações que especifiquem de que tipo são as variáveis que ele
utilizará e as vezes um valor inicial. Tipos podem ser por exemplo: inteiros, reais,
caracteres, etc. As expressões combinam variáveis e constantes para calcular novos
valores.
Public ab3 As Double
Public bb3 As Double
Public vi As Double
Public valorporta As Integer
Public npulso As Integer
Public ii As Integer
Public inter As Integer
Public VCP As Integer
Public fdt As Single
Public iii As Single
Public exi As Single
Public exf As Single
Public eyi As Single
Public eyf As Single
49
Public ppg As Single
Public Dx As Single
Public periodo As Double
Dim ic As Double
Dim pi As Double
Dim x0, y0, xg, a, dw, ym
Dim bkcolor
Dim fcolor
Dim mover As Boolean
Public Declare Function Inp Lib "inpout32.dll" Alias "Inp32" (ByVal PortAddress As
Integer) As Integer
Public Declare Sub Out Lib "inpout32.dll" Alias "Out32" (ByVal PortAddress As
Integer, ByVal Value As Integer)
Public Declare Function InValue Lib "inpout32.dll" _
Alias "Inp32" (ByVal PortAddress As Integer) As Integer
Public Declare Sub GetSystemTime Lib "kernel32" (lpSystemTime As SYSTEMTIME)
Public Declare Function SetSystemTime Lib "kernel32" (lpSystemTime As
SYSTEMTIME) As Long
Public Type SYSTEMTIME
wYear As Integer
wMonth As Integer
wDayOfWeek As Integer
wDay As Integer
wHour As Integer
50
wMinute As Integer
wSecond As Integer
wMilliseconds As Integer
End Type
APÊNDICE B - SOFTWARE PARA CAPTURA DE DADOS
51
APÊNDICE C - FUNÇÃO PARA CONVERSÃO BINÁRIO DECIMAL
Private Function Status3(PortAddress As Integer) As String
Dim i As Integer
Dim NumDeBits As Integer
Dim inVal As Integer
Dim OutVal As String
If PortAddress = 888 Then
NumDeBits = 8
ElseIf PortAddress = 889 Then
NumDeBits = 5
Else
NumDeBits = 8
End If
ReDim PortBits(NumDeBits) As Integer
inVal = Inp(PortAddress)
valorporta = inVal
Form3.BES(0) = inVal
For i = 1 To NumDeBits
PortBits(i) = inVal Mod 2
inVal = Fix(inVal / 2)
Form3.BES(i) = PortBits(i)
Next i
For i = NumDeBits To 1 Step -1
52
OutVal = Trim(OutVal) & PortBits(i)
Next i
Status = OutVal
End Function
APÊNDICE D - FUNÇÃO PARA CÁLCULO DA GRAVIDADE TERRESTRE
Sub CG_Change(Index As Integer)
Dim v1 As Single
Dim v2 As Single
Dim v3 As Single
Dim v4 As Single
Dim v5 As Single
Dim v6 As Single
Dim v7 As Single
Dim v8 As Single
Dim v9 As Single
Dim v10 As Single
Dim gt As Single
v1 = Form3.CG(1)
v2 = Form3.CG(2)
v3 = Form3.CG(3)
v4 = Form3.CG(4)
53
v5 = Form3.CG(5)
v6 = Form3.CG(6)
v7 = Form3.CG(7)
v8 = Form3.CG(8)
v9 = Form3.CG(9)
v10 = Form3.CG(10)
periodo = (v1 + v2 + v3 + v4 + v5 + v6 + v7 + v8 + v9 + v10) / 10
gt = (4 * (3.14) ^ 2 * 0.31) / (periodo ^ 2)
Form3.Gravidade = gt
End Sub
APÊNDICE E - FUNÇÃO PARA PLOTAR O GRÁFICO
Sub Command8_Click()
For p = 0 To exf Step 1
' Picture1.Line (p, 0.5)-(p, -eyf), RGB(200, 100, 2)
Next p
'horizontal
For p = 0 To exf Step 0.5
Picture1.Line (-1, -p)-(exf, -p), RGB(200, 100, 2)
Next p
For p = 0 To exf Step 0.1
54
Picture1.Line (-0.25, -p)-(0.5, -p), RGB(200, 100, 2)
Next p
Picture1.Line (-exi, 0)-(exf, 0)
Picture1.Line (0, eyi)-(0, -eyf)
End Sub
APÊNDICE F - FUNÇÃO PRINCIPAL PARA LEITURA E CAPTURA DOS
DADOS
Sub Timer1_Timer()
Dim VP As Integer:
Dim vt As Single
Dim speed As Double
Dim vi As Single
Dim fre As Double
Dim VD As Integer
Dim vm As Single
Dim mv0 As Single
Dim mv1 As Single
Dim mv2 As Single
Dim mv3 As Single
Dim mv4 As Single
Dim mv5 As Single
55
Dim mv6 As Single
Dim mv7 As Single
Dim mv8 As Single
Dim mvm As Single
Dim ino As Integer
Dim GMTime As SYSTEMTIME
Dim TheTime As String
Dim a As Double, b As Double
Dim mt As Date
Dim X As Integer
Dim alternar As Integer
VP = Form3.Text3
Static k1 As Integer
Static iii As Single
GetSystemTime GMTime
bb3 = GMTime.wSecond + 0.001 * GMTime.wMilliseconds
Text1.Text = bb3
Static y1 As Integer
Static vs As Integer
Dim p As String
p = Form3.Combo2
Status3 (p)
mv0 = Form3.BES(0)
mvm = mv0
56
vi = mvm
vt = valorporta
' mv = (bb3 - ab3)
If vt <> VCP Then 'COMPARAÇÃO DA PORTA
mv = (bb3 - ab3)
If alternar <> vt And mv > 0.04 Then
'If Abs(mv) > 0 And mv < bb3 Then
k1 = k1 + 1
vs = vs + 1
ii = ii + 1
If vs > 10 Then vs = 1
iii = iii + 0.1 'Abs(mv)
Form3.ProgressBar1.Value = iii
Form3.F1Book1.TextRC(ii, 1) = k1 'seq
Form3.F1Book1.TextRC(ii, 2) = ii 'pulso
Form3.F1Book1.TextRC(ii, 3) = Format(2 * mv, "#0.00000")
Form3.F1Book1.TextRC(ii, 4) = vi 'valor
Form3.F1Book1.TextRC(ii, 5) = Format(periodo, "#0.00000")
Form3.CG(vs) = Format(mv, "#0.00000")
Picture1.PSet (iii, -periodo)
Form3.tempo = mv
For w = 1 To 10
Form3.CG(w).BackColor = &HFF00&
Next w
57
Form3.CG(vs).BackColor = &HFF&
End If
ab3 = bb3
vt = 0
Form3.Text2 = bb3
If iii > exf Then
iii = 0.1
ii = 1
Form3.Picture1.Cls
Form3.Form_Activate
End If
End If
If k1 >= exf Then k1 = 0
npulso = k1
'End If
ppg = iii
'Form3.CMD3_Click
alternar = vt
End Sub
APÊNDICE G - PROGRAMA PARA CALCULAR OS TERMOS DA SÉRIE
PI = 3.14: L = 0.4: G = 10:
For X = 0 To 3.14 Step 0.01
58
i = i + 1: A = X: K = Sin(A / 2)
P0 = 2 * PI * Sqr(L / G)
T1 = 1 + (1 / 2) ^ 2 * K ^ 2
T2 = ((1 * 3) / (2 * 4)) ^ 2 * K ^ 4
T3 = ((1 * 3 * 5) / (2 * 4 * 6)) ^ 2 * K ^ 6
T4 = ((1 * 3 * 5 * 7) / (2 * 4 * 6 * 8)) ^ 2 * K ^ 8
T5 = ((1 * 3 * 5 * 7 * 9) / (2 * 4 * 6 * 8 * 10)) ^ 2 * K ^ 10
T6 = ((1 * 3 * 5 * 7 * 9 * 11) / (2 * 4 * 6 * 8 * 10 * 12)) ^ 2 * K ^ 12
T7 = ((1 * 3 * 5 * 7 * 9 * 11 * 13) / (2 * 4 * 6 * 8 * 10 * 12 * 14)) ^ 2 * K ^ 14
T8 = ((1 * 3 * 5 * 7 * 9 * 11 * 13 * 15) / (2 * 4 * 6 * 8 * 10 * 12 * 14 * 16)) ^ 2 * K ^ 16
T9 = ((1 * 3 * 5 * 7 * 9 * 11 * 13 * 15 * 17) / (2 * 4 * 6 * 8 * 10 * 12 * 14 * 16 * 18)) ^ 2 * K ^
18
T10 = ((1 * 3 * 5 * 7 * 9 * 11 * 13 * 15 * 17 * 19) / (2 * 4 * 6 * 8 * 10 * 12 * 14 * 16 * 18 *
20)) ^ 2 * K ^ 20
P1 =P0 * (1+TR1 + TR2 + TR3)
P2 = P0 * (1+TR1 + TR2 + TR3 + TR4 + TR5)
If T1 < 100 Then
Form6.Picture1.PSet (X, -P0)
Form6.Picture1.PSet (X, -P1)
Form6.Picture1.PSet (X, -P2)
End if