Dental Procedure 3D Simulation Using a Hapic Device
Software de Simulação de Procedimentos Dentários Utilizando Dispositivo Phantom
Omni e Modelos 3D
Marlan Külberg
INCT-MACC
Laboratório Nacional de Computação Científica
Petrópolis, RJ, Brasil
[email protected]
Abstract—This work aims at describing a 3D tooth repair
procedure haptic simulation. 3D models are used to allow
the user to interact realistically with the systems due to the
force-feedback enabled haptic devices. This text describes the
operation of the system, as well as future work.
Keywords-haptic devices, PHANTOM, Virtual Reality, Dental Simulation, Human Computer Interaction
I. I NTRODUÇÃO
Nos dias de hoje, a higiene oral é efetuada por especialistas não só em instituições odontológicas mas também
em outros tipos de instalações. Entretanto, para executar
os procedimentos necessários adequadamente, é preciso que
o especialista em questão obtenha habilidade através de
treinamento. Infelizmente, a maioria das instituições de
educação voltadas para esse fim possuem vários problemas,
como a falta de pacientes voluntários para treinamento dos
estudantes, os preços elevados dos artefatos artificiais para
simulação de procedimentos sendo que mesmo assim não
proporcionam sensações similares à realidade [1].
Desta forma, a realidade virtual (RV) pode ser utilizada
como um método de treinamento que facilita a formação do
especialista de forma barata, segura e eficaz, especialmente
nos primeiros estágios do treinamento. Nesse sentido, é
proposto um sistema de auxílio para treinamento e formação
de especialistas. Foi construído um simulador de RV háptico
com o intuito de viabilizar o aprendizado e a prática dos
profissionais. É ainda necessário que se faça uma avaliação
do simulador para que haja melhoramentos no sistema. A
sensação háptica é relativa ao toque, e se dedica a simular a
pressão, a textura, a vibração e outras sensações biológicas
relacionadas com o tato [2].
A contribuição do presente estudo é, demonstrar como o
uso de dispositivos hápticos com características de retorno
de força pode ser utilizado no ensino de especialização de
tratamento dentário de forma efetiva e barata, em comparação com as alternativas hoje existentes.
Jauvane Cavalcante de Oliveira
INCT-MACC
Laboratório Nacional de Computação Científica
Petrópolis, RJ, Brasil
[email protected]
II. T RABALHOS R ELACIONADOS
A simulação virtual para treinamento tem sido amplamente utilizada em várias áreas do conhecimento, sendo
uma das mais importantes, a área da saúde de modo geral.
Podemos assim, apreciar um amplo leque de soluções para
simulações de operações e procedimentos de todo tipo.
Dentro dessa área, não é estranho que também haja pesquisa
para procedimentos odontológicos. Citamos a seguir, alguns
exemplos de sistemas bem sucedidos relacionados à simulação em ambientes virtuais.
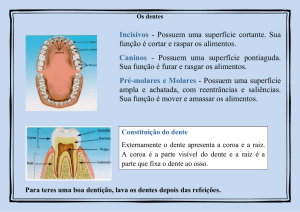
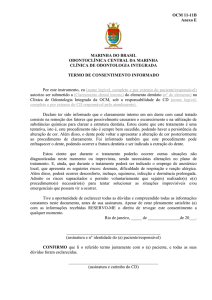
Criado pela Academisch Centrum Tandheelkunde Amsterdam (ACTA), o Simodont [3](figura 1(a)) é um simulador
dental de alta qualidade, sendo usado por alunos para
desenvolver suas habilidades em um mundo virtual, obtendo
retorno sobre suas decisões e habilidades. Ele consiste de
uma tela pequena de projeção (posicionada no lugar do
paciente) onde é projetada a imagem da boca e os dentes. As
imagens são transmitidas ao usuário em 3D através de óculos
estereoscópicos que fornecem a percepção de profundidade.
Há ainda um dispositivo que imita uma broca e permite que
o usuário sinta resistência ao tocar em objetos virtuais. Esses
objetos também respondem de forma diversa à sensação
háptica, tendo por exemplo, um retorno de força maior
quando se toca um esmalte saudável do que um cariado.
O sistema também permite que as ações do usuário se
comuniquem com o seu material de aprendizagem, de forma
que o aluno possa aprender com seus erros.
Pesquisadores do Korea Institute of Science and Technology desenvolveram um sistema de treinamento dentário
utilizando uma interface multi-modal com sensações táteis,
visuais e auditivas [4] (figura 1(b)). Ele permite que os
estudantes de odontologia aprendam os procedimentos de
manipulação dos instrumentos tendo sensações reais e, com
isso, possam avaliar o seu desempenho. Neste projeto, foram
utilizados algoritmos de renderização háptica estável com relação ao vídeo exibido, modelos de deformação para o dente
virtual que está sofrendo o procedimento e renderização de
som para simular o contato entre o instrumento e o dente.
Além disso, foi criada uma bancada que registra todas as
sensações promovidas, para que o usuário sinta, veja e ouça
ao mesmo tempo o que acontece no ambiente virtual.
Pesquisadores do Aoyama Gakuin University e do Chiba
University, no Japão, desenvolveram um simulador para
formação de profissionais que utiliza um dispositivo háptico
do modelo Phantom Desktop e um capacete do tipo HMD
para a visualização estereoscópica do mundo virtual [1]
(figura 1(c)). A eficácia deste equipamento foi comprovada
com base em testes realizados por alunos veteranos e por
iniciantes, onde se levou em conta a diferença da força de
operação de procedimentos entre eles. Constatou-se que o
sistema háptico do simulador contribuiu para o treinamento
enquanto que o sistema estereoscópico usado de forma
isolada não logrou êxito.
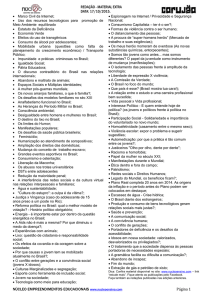
suporte a dispositivos de retorno de força bem como sua
avaliação, além de detecção de colisão e interatividade. O
hardware responsável por proporcionar a sensação háptica ao
usuário é o dispositivo Phantom Omni (figura 2), também
da Sensable. Este modelo possui seis graus de liberdade de
posicionamento (6DOF).
Figure 2: Phantom Omini [5]
IV. I MPLEMENTAÇÃO
(a)
(b)
O software, basicamente, exibe um maxilar, com o qual
o usuário poderá interagir através de instrumentos, como
um escavador dental ou uma broca. O objetivo é desbastar
um dente em uma área específica ou então em várias áreas,
apresentando variados níveis de desgaste. Esses níveis, na
verdade, são modelos estáticos que são exibidos ou retirados
do programa conforme ocorre a interação do instrumento
com o dente que recebe o procedimento.
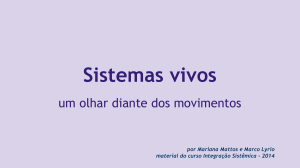
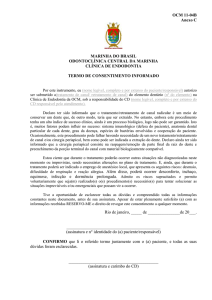
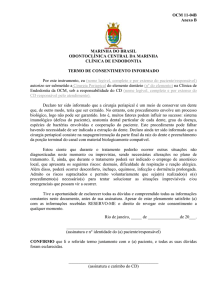
Há a opção de interagir no desgaste do dente de duas
formas: utilizando apenas um modelo de dente com vários
níveis de desbastamento, ou apresentando um modelo subdividido em várias partes coordenadas (figura 3), sendo que
cada parte também oferece várias etapas para remoção. O
segundo modelo permite que se escolha qual a parte do dente
será diminuída ou a ordem do desgaste do dente no qual se
está interagindo. O primeiro modelo permite a visualização
do desgaste do dente apenas na sua parte central.
(c)
Figure 1: Exemplos de simuladores de treinamento de
procedimentos dentários: (a) Simodont, da Acta [3]; (b)
Simulador Multi-modal da KIST [4] e (c) Simulador com
HMD da Chiba Universityt [1]
III. H ARDWARE E S OFTWARE U TILIZADOS
Para a realização do trabalho, foi utilizada a biblioteca
Openhaptics 3.0 da Sensable Technologies [5], junto com as
API’s de desenvolvimento HDAPI e Quickhaptics. O HDAPI
representa a biblioteca de baixo nível para programação de
retorno de força enquanto o Quickhaptics tem a função de
efetuar uma linguagem mais consistente para trabalhar a
sensação háptica dentro de um ambiente 3D. Através dela,
é possível controlar a deformação de objetos, além de dar
Figure 3: Modelo 3D de um dente subdividido em 5 partes
coordenadas diferentes
Pode-se escolher utilizar tanto um escavador quanto uma
broca para proceder a intervenção. Através do algoritmo, a
parte da gengiva fica separada dos dentes, permitindo que a
sensação de retorno de força ocorra de forma diferente do
que ocorre com os dentes, já que cada parte possui diferentes
propriedades de rigidez e atrito. Como a gengiva é maleável,
é possível, ao pressioná-la com o instrumento, sentir uma
retração do modelo e consequente resistência, se a força for
excessiva. Os dentes foram projetados para criar resistência
máxima ao toque do instrumento, dando o retorno de força
similar a quando se colide um objeto com algo sólido. A
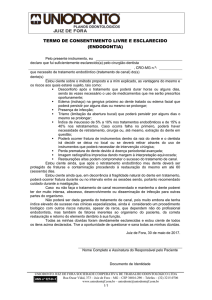
figura 4 ilustra um usuário utilizando o sistema.
Figure 4: Sistema sendo utilizado.
Embora seja possível modelar todos os dentes para interação em todos os níveis oferecidos pelo programa, isso
ocasiona um peso computacional muito grande na questão
gráfica. Por isso, em um primeiro momento optou-se por
fazer uso de apenas um dente. No caso, um segundo molar inferior, para evitar sobrecarga no sistema. Os dentes
restantes da arcada são modelados em conjunto, deixando
assim o programa mais rápido.
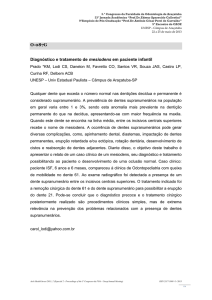
O desgaste do dente no programa pode se dar através
da quantidade de vezes que o instrumento colide com a
coordenada que se quer raspar, sendo esse número definido
no sistema. Esse modo de uso é mais indicado para a
utilização do escavador, pois simula melhor a ação de raspar
o dente (figura 5 (a)). Na aplicação, ficou disposto que três
colisões seriam necessárias para o instrumento alcançar um
novo nível de desgaste do dente, na região onde acontece a
colisão. Também é possível alcançar o desgaste através do
tempo em que o instrumento interage com o dente, sendo
que esse modo é aconselhável para uso da broca (figura
5 (b)), uma vez que o instrumento não necessita de grande
quantidade de movimentos para conseguir desbastar o dente.
Na aplicação, usa-se o tempo de 2 segundos totais em que
o instrumento colide com o dente. O tempo e a quantidade
de toques são configuráveis.
O dente a sofrer intervenção possui cinco níveis de
desgaste, sendo que ele também pode ser subdividido em
cinco partes coordenadas. Neste caso, cada coordenada do
dente possuirá cinco níveis de desgaste independentes. Dessa
forma, é possível desnivelar certas partes do dente mais que
outras, gerando um resultado irregular se este for o desejo do
usuário. As figuras 5 (c) e 5 (d) mostram respectivamente
o dente totalmente desgastado usando apenas um modelo,
e usando o modelo subdividido. As partes são construídas
para serem desbastadas linearmente, respeitando o desgaste
atribuído anteriormente pelo algoritmo.
(a)
(b)
(c)
(d)
Figure 5: Uso do escavador (a) e da broca (b) em um dente
ainda perfeito. A figura (c) representa o desgaste máximo do
modelo único de dente e a figura (d) apresenta o desgaste
de um modelo de dente subdividido.
V. R ESULTADOS E D ISCUSSÃO
Uma vez que não é utilizado neste projeto nenhum tipo de
ferramenta de modelagem dinâmica, chegou-se a conclusão
que a troca de modelos 3D com diferentes níveis de desgaste
seria o melhor método para a realização do trabalho. Essa
solução tem a desvantagem de impedir que o desgaste seja
efetuado livremente, já que os modelos são pré-definidos.
Contudo, permite um controle didático maior no método de
ensino aplicado ao aluno.
A interação háptica ocorre de forma satisfatória, no que
tange às colisões entre os objetos que se relacionam no
projeto. O retorno de força emitido tanto na gengiva quanto
na arcada dentária ou mesmo no dente que sofre intervenção
proporciona sensação de realidade, atendendo à necessidade
principal da simulação.
É necessário ainda gerar um método para carregar ou
retirar dinamicamente os modelos de forma a minimizar
o processamento da aplicação. Deve-se considerar fornecimento de uma grande quantidade de modelos e que cada
modelo de dente deve ser dividido em várias partes e ainda,
que cada uma delas deve possuir vários níveis de desgaste.
Sem isso, corre-se o risco de atrasar a sensação háptica
devido ao atraso de processamento, o que acarreta na perda
da sensação de realidade.
Um trabalho em conjunto com profissionais da área poderia resultar em modelos dentários que reflitam a necessidade
de intervenção e aprendizado do aluno. Com esses modelos
pré-definidos, o aluno poderia fazer uso de variados tipos
de treinamento específico, com um conjunto de modelos
sendo utilizado para cada fim. Assim, podem existir funções
no software para tratamentos de canal, obturações, limpeza,
extração, entre outros procedimentos.
VI. C ONCLUSÃO
Foi demonstrado neste artigo, um método para auxílio no
treinamento de procedimentos dentários, usando dispositivo
e aplicações hápticas de retorno de força.
O projeto permite que, através de objetos virtuais controlados pelo usuário, consiga-se não somente ter a sensação de
toque como também seja possível interagir com objetos. No
caso, o usuário pode fazer uso do instrumento que controla
para raspar um dente, desgastando-o em vários lugares e em
diferentes níveis.
Para realizar a aplicação, foram modelados em um mundo
virtual, todos os elementos necessários para a interação
usuário/sistema, como modelos de gengiva, arcada dentária,
vários modelos de partes de dentes e instrumentos característicos ao uso do projeto.
Há ainda oportunidade para evoluir o sistema considerando várias situações, mas é preciso observar sempre
a otimização da execução do programa já que o dispositivo
háptico não tolera atraso de processamento, com o revés de
se perder a sensação de realidade na simulação.
VII. T RABALHOS F UTUROS
As principais sugestões de trabalhos futuros se baseiam
em aumentar o grau de imersão do usuário com a aplicação.
Para isso, pode-se introduzir mais dispositivos e adaptar o
software à outras situações.
A aplicação é baseada na linguagem C++, possibilitando
assim, a construção de um plugin voltado para a exibição
estereoscópica. O Framework Instantreality [6] permite a
implementação de dispositivos à sua plataforma, de modo
que é possível fazer com que o Phantom interaja com
modelos 3D usando tanto extensões X3D [7] quanto VRML.
Além disso, o dispositivo poderá dispor de recursos de
estereoscopia passiva, já que o Instantreality oferece suporte
a esse modelo de exibição.
Para evoluir a aplicação, também podem ser construídos modelos para tratamentos dentários específicos, como
limpeza de placa e tártaro, canal, etc. Nesses casos, também
é necessário alterar o procedimento e as ferramentas a
serem utilizadas na dentadura virtual, bem como a duração
de tempo, intensidade e quantidade de colisões entre instrumento e dente. Além disso, é possível desmembrar o
objeto que simula os instrumentos, por exemplo, separando
a broca de seu corpo, e através disso representar somente o
movimento rotatório da broca. Para isso, faz-se necessário
atribuir as funções de transformação em razão do tempo do
objeto em questão.
AGRADECIMENTOS
Agradecemos o apoio financeiro proveniente do Programa
de Capacitação Institucional - PCI/LNCC/MCTI, do Conselho Nacional de Desenvolvimento Científico e Tecnológico
- CNPq (Processos 308857/2008-9 e 309318/2011-4), da
Fundação Carlos Chagas Filho de Amparo à Pesquisa
do Estado do Rio de Janeiro - FAPERJ (Processos E26/103.106/2008 e E-26/103.241/2011), do Instituto Nacional de Ciência e Tecnologia em Medicina Assistida por
Computação Científica - INCT-MACC (Processos CNPq
181813/2010-6 e FAPERJ E-26/170.030/2008).
R EFERENCES
[1] N. Hashimoto, H. Kato and K. Matsui, Evaluation of Training
Effect of Tooth Scaling Simulator by Measurement of Operation Force. Aoyama Gakuin University Chiba University,
Netherlands, 2011.
[2] T. A. C. dos Santos and R. B. de Araújo, Dicionário de
Informática, Multimídia e Realidade Virtual. Melhoramentos,
São Paulo, 2001.
[3] P. Koopman, J. Buis., P. Wesselink and M. Veervom, Simodont,
A Haptic Dental Training Simulator Combined With Courseware.
Academisch Centrum Tandheelkunde Amsterdam,
Netherlands, 2011.
[4] L. Kim, Y. Hwang, H. Park and S. Ha, Dental Training System
using Multi-modal Interface. Korea Institute of Science and
Technology, South Korea, 2005.
[5] Sensable technologies., http://www.sensable.com/productshapticdevices.htm. Acessado em 11/03/2012.
[6] Instantreality.org., http://www.instantreality.org/.
em 11/03/2012.
Acessado
[7] D. Brutzman and L. Daly., X3D: 3D Graphics for Web
Authors. Morgan Kaufmann Publishers, 2007.