FÍSICA
PRÉ-VESTIBULAR
LIVRO DO PROFESSOR
Esse material é parte integrante do Aulas Particulares on-line do IESDE BRASIL S/A,
mais informações www.aulasparticularesiesde.com.br
© 2006-2008 – IESDE Brasil S.A. É proibida a reprodução, mesmo parcial, por qualquer processo, sem autorização por escrito dos autores e do
detentor dos direitos autorais.
I229
IESDE Brasil S.A. / Pré-vestibular / IESDE Brasil S.A. —
Curitiba : IESDE Brasil S.A., 2008. [Livro do Professor]
732 p.
ISBN: 978-85-387-0576-5
1. Pré-vestibular. 2. Educação. 3. Estudo e Ensino. I. Título.
CDD 370.71
Disciplinas
Autores
Língua Portuguesa
Literatura
Matemática
Física
Química
Biologia
História
Geografia
Francis Madeira da S. Sales
Márcio F. Santiago Calixto
Rita de Fátima Bezerra
Fábio D’Ávila
Danton Pedro dos Santos
Feres Fares
Haroldo Costa Silva Filho
Jayme Andrade Neto
Renato Caldas Madeira
Rodrigo Piracicaba Costa
Cleber Ribeiro
Marco Antonio Noronha
Vitor M. Saquette
Edson Costa P. da Cruz
Fernanda Barbosa
Fernando Pimentel
Hélio Apostolo
Rogério Fernandes
Jefferson dos Santos da Silva
Marcelo Piccinini
Rafael F. de Menezes
Rogério de Sousa Gonçalves
Vanessa Silva
Duarte A. R. Vieira
Enilson F. Venâncio
Felipe Silveira de Souza
Fernando Mousquer
Produção
Projeto e
Desenvolvimento Pedagógico
Esse material é parte integrante do Aulas Particulares on-line do IESDE BRASIL S/A,
mais informações www.aulasparticularesiesde.com.br
Esse material é parte integrante do Aulas Particulares on-line do IESDE BRASIL S/A,
mais informações www.aulasparticularesiesde.com.br
Esse material é parte integrante do Aulas Particulares on-line do IESDE BRASIL S/A,
mais informações www.aulasparticularesiesde.com.br
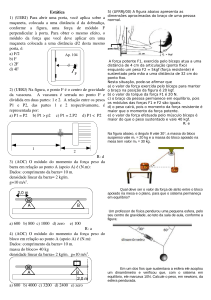
Estática
Um caso bastante interessante pode ser observado na rotação de uma roda em torno de seu eixo e
este eixo sofre translação.
Com este tópico pretendemos conceituar o momento de uma força em relação a um ponto ou um eixo,
bem como, exprimi-lo matematicamente; estudaremos
também as unidades de momento e as aplicações práticas dessa grandeza física.
Estática é a parte da Mecânica que estuda as
forças em equilíbrio.
Vamos considerar, inicialmente, os movimentos
clássicos de um corpo.
Consideremos o corpo rígido M da figura abaixo,
no qual marcamos um segmento de reta AB; se ele
sofre um movimento, onde ocupa posições sucessivas
representadas pelas figuras M1 e M2, e se observamos
que o segmento de reta mantém posições paralelas
entre si, dizemos que esse corpo M apresenta movimento de translação.
A
A
B
A
B
M
B
A
Momento de uma força
A resultante de um sistema de forças é a grandeza física responsável pelo movimento de translação
acelerada.
Momento de uma força (ou torque) é a grandeza física responsável pelo movimento de rotação
do corpo.
O momento de uma força é uma grandeza vetorial e a soma de momentos deve obedecer as regras
da soma vetorial.
Vamos considerar um ponto fixo P e uma força
→
F cuja direção não contenha o ponto P.
M2
M1
Se marcarmos nesse corpo um ponto P, por exemplo, num de seus vértices, e o movimento ocupa as
posições sucessivas representadas pelas figuras M3
e M4, e se observarmos que os pontos extremos do
segmento AB giram em torno de P, dizemos que esse
corpo M apresenta movimento de rotação.
→
M
90°
P
→
F
d
90°
M
→
A
M3
B
A
B
P
B
EM_V_FIS_011
A
M4
A
O
O
Os movimentos reais são geralmente constituídos dos dois movimentos simultaneamente.
O módulo do momento da força F em relação ao
ponto P será dado pelo produto do módulo da força
pela distância d , que é chamada braço de alavanca;
observe que o braço de alavanca é a menor distância
entre o ponto P e a direção da força.
A direção do vetor momento é a da perpendicular ao plano que contém a direção da força e o braço
de alavanca.
O sentido é dado pela regra da mão direita
(coloque os dedos da mão direita como indicado na
figura a seguir; considerando a força com o sentido
dos dedos encurvados, o polegar representará o
sentido do vetor momento).
Esse material é parte integrante do Aulas Particulares on-line do IESDE BRASIL S/A,
mais informações www.aulasparticularesiesde.com.br
1
IESDE Brasil S.A
primento e de peso desprezível em relação aos demais parâmetros do problema, tendo aplicadas duas
→
→
forças F 1 e F 2 paralelas e de mesmo sentido, uma em
cada extremidade, conforme a figura abaixo:
A
B
→
F2
→
F1
Digital Juice
O sentido pode ser dado também pela regra do
parafuso ou do saca-rolhas, vista em Matemática no
produto vetorial de dois vetores.
→
Como sabemos a resultante será R = F 1 + F 2
e terá módulo R = F1 + F2 ; falta-nos determinar o
ponto de aplicação dessa resultante.
O processo gráfico mais simples é transferir
cada uma das forças para o ponto de aplicação da
outra, invertendo o sentido de apenas uma delas;
unindo-se as extremidades dos dois vetores por um
segmento de reta, a intersecção dele com AB determinará o ponto de aplicação da resultante.
a
b
→
– F1
Unidades de momento
2
A unidade SI será: N . m; como essa unidade
é vetorial, usava-se, antigamente, escrevê-la m . N,
para que não fosse confundida com a unidade de
trabalho, que é escalar; lembre-se que N . m = J, se
for escalar.
A unidade no sistema CGS será: dyn.cm.
No sistema MKgfS a unidade será: kgf.m
Apresentamos alguns exemplos:
1. Considere uma barra homogênea AB de com-
A
B
→
→
F2
F2
→
R
O ponto de aplicação da resultante será tal que:
F1 = b e a + b =
F2
a
2. Considerando a mesma barra AB de comprimento e de peso desprezível em relação aos demais
parâmetros do problema, tendo aplicadas duas forças
→
→
F 1 e F 2 paralelas e de sentidos opostos, uma em cada
extremidade, conforme a figura abaixo:
→
F2
A
B
→
F1
Esse material é parte integrante do Aulas Particulares on-line do IESDE BRASIL S/A,
mais informações www.aulasparticularesiesde.com.br
EM_V_FIS_011
No caso de forças coplanares usamos apenas
a intensidade do momento, admitindo sinal positivo
quando a força produz rotação, em torno do ponto
fixo, no sentido anti-horário ou negativo para rotação
no sentido horário.
Se tivermos um sistema de forças paralelas, a
resultante terá sempre a mesma direção delas e seu
módulo será a soma algébrica de todas as forças,
onde o sinal de cada uma delas estará vinculado ao
sentido das mesmas. Podemos dizer que o momento
da resultante não-nula, em relação a qualquer ponto,
será igual à soma dos momentos das forças dadas
em relação a esse mesmo ponto.
→
A resultante será R = F1 + F2 terá módulo R =
F1 – F2; determinemos o ponto de aplicação dessa
resultante.
Vamos, outra vez, transferir cada uma das forças para o ponto de aplicação da outra, invertendo
sempre o sentido de apenas uma delas; unindo-se
as extremidades dos dois vetores por um segmento
de reta, a intersecção dele com AB determinará o
ponto de aplicação da resultante. Observe que neste
segundo exemplo, o ponto de aplicação da resultante
estaria colocado fora da barra, isto é, a força única,
que substituiria as outras duas forças seria uma
força colocada no ponto O da reta que contivesse a
barra AB.
b
a
→
→
R
F2
→
F1
será Mtotal = MF1 + MF2 ; se calcularmos os momentos
→
→
de F1 e de F2 em relação a um ponto qualquer da barra
( O ) teremos:
M F1 = F1 x AO e M F2 = F2 x BO
e como ambos giram a barra no mesmo sentido (na figura acima, o sentido anti-horário), têm o mesmo sinal,
portanto M total = M F1 + M F2 e lembrando que as forças são iguais em módulo: M total = F 1 x (AO + BO )
M F1 = F1 x AB , ou seja, o módulo do momento total é dado pelo produto do módulo de uma das
forças pela comprimento da alavanca; como pode ser
constatado, no binário a resultante é nula, mas o momento total não é nulo; a barra não sofre translação,
porém sofre rotação.
Na prática, temos vários exemplos da aplicação
dos binários: nos motores elétricos, nas chaves de
roda usadas por profissionais, na rotação de maçanetas de forma redonda, no uso de chaves de fenda
etc.
Quando dois binários agindo no mesmo plano
apresentam momentos iguais, são chamados de
binários equivalentes.
Teorema de Varignon
Continuaria valendo a relação entre forças:
F1 = b e b – a =
F2
a
Nesses dois casos apresentados, a barra estaria sofrendo movimento de translação e também de
rotação.
Um caso particular, bastante usado praticamente, é o caso de duas forças paralelas, de sentidos
opostos, tendo módulos iguais: tal sistema é chamado de binário, conjugado ou par de forças.
O momento total de um sistema de forças em
relação a um ponto qualquer é igual ao momento
da resultante desse sistema em relação ao mesmo
ponto, excetuando-se o caso em que a resultante
seja nula (binário). Teorema das três forças para um
corpo extenso.
Se um corpo extenso em equilíbrio estiver submetido a apenas três forças, estas necessariamente
passam por um único ponto (retas concorrentes) ou
são paralelas.
F3
F2
A
N
T
→
F1
F2
B
P
O
→
F1
Equilíbrio de uma partícula
EM_V_FIS_011
→
A resultante será R = F1 + F2 e terá módulo nulo,
isto é, a barra não sofre translação; o momento total
Dizemos que uma partícula está em equilíbrio
quando a resultante do sistema de forças que atua
sobre ela é nulo.
Esse material é parte integrante do Aulas Particulares on-line do IESDE BRASIL S/A,
mais informações www.aulasparticularesiesde.com.br
3
F=0 ⇒R=0
y
Como já sabemos de vetores R = 0 implica:
Rx = 0 e Ry = 0
p1
Como a partícula é considerada um ponto material, todas as forças aplicadas sobre ela têm suas
linhas de ação concorrentes nela, já que um ponto
material é considerado sem dimensão.
CG
p3
pn
Equilíbrio de um
corpo rígido
São duas as condições para equilíbrio de um
corpo rígido:
1. A resultante de todas as forças que agem
sobre esse corpo tem que ser nula: isso implica que
o corpo não pode ter translação acelerada; se ele
tiver translação, esta só poderá ocorrer com vetor
velocidade constante.
2. O momento total deve ser nulo: isso implica
que o corpo não pode sofrer rotação.
O item 1 nos mostra que podemos considerar
dois tipos de equilíbrio: o estático, quando o corpo
está parado e o dinâmico, quando o corpo está em
movimento retilíneo e uniforme.
Portanto, para equilíbrio, teremos sempre:
F=0 ⇒R=0
M = 0 ⇒ Mtotal = 0
Centro de gravidade
4
P
x
Sejam p1 , p2 , ... , pn os pesos das partículas
consideradas; podemos escrever:
xCG
=
p1x1 + p2x2 + ...+ pnxn
p1+ p2+ ...+ pn
yCG
=
p1y1 + p2y2 + ...+ pnyn
p1+ p2+ ...+ pn
onde x1 , x2 , ... , xn e y1 , y1 , ... , yn representam as
coordenadas das partículas e xCG e yCG representam
as coordenadas do centro de gravidade, ou seja, o
ponto de aplicação da força peso.
Se tivermos um corpo homogêneo e simétrico
o centro de gravidade coincide com seu centro de
simetria.
Corpos apoiados
Para que haja equilíbrio de um corpo rígido
apoiado em um plano, é condição necessária que a
perpendicular sobre esse plano, baixada do centro de
gravidade, passe pelo polígono da base de apoio.
Podemos considerar três tipos de equilíbrio:
1. Estável: quando o corpo afastado ligeiramente da posição de equilíbrio a retoma espontaneamente.
2. Instável: quando o corpo afastado ligeiramente da posição de equilíbrio não a retoma espontaneamente.
3. Indiferente: quando o corpo afastado ligeiramente da posição de equilíbrio, toma, espontaneamente, outra posição de equilíbrio.
EM_V_FIS_011
Consideremos um corpo de massa m. A força
gravitacional da Terra atua em cada partícula desse
corpo, tendo direção vertical e sentido para o centro
da Terra; como o centro da Terra está muito distante
do corpo, podemos considerar que as forças sobre as
partículas são paralelas e com isso, somar algebricamente as forças e determinar sua resultante teórica :
essa resultante é chamada peso do corpo.
O peso do corpo está aplicado em um ponto
teórico chamado centro de gravidade.
Podemos determinar esse ponto associando ao
corpo um par de eixos cartesianos e considerar, para
cada partícula, suas coordenadas x e y.
p2
Esse material é parte integrante do Aulas Particulares on-line do IESDE BRASIL S/A,
mais informações www.aulasparticularesiesde.com.br
Exemplos:
Estável
Instável
Indiferente
Observa-se que, na primeira figura, um ligeiro
deslocamento provocará elevação do centro de gravidade (aumento da energia potencial gravitacional);
na segunda, ocorrerá abaixamento do centro de gravidade (diminuição da energia potencial gravitacional); na terceira, um ligeiro movimento não alterará
a altura do centro de gravidade (a energia potencial
gravitacional permanece constante)
A máquina é chamada de máquina simples quando é
constituída de um único sistema rígido. Nessas máquinas consideramos somente duas forças aplicadas: a
força motora, força potente ou potência (aquela que
aciona a máquina) e a força resistente ou resistência
(a força que a máquina deve vencer) .
Definimos vantagem mecânica de uma máquina
a razão entre a força resistente e a força potente.
Consideramos três tipos de máquinas simples:
1. Alavancas: consta, basicamente, de uma barra
rígida que é colocada sobre um ponto de apoio.
Podemos considerar três possibilidades de
aplicação:
Corpos suspensos
Para um corpo suspenso estar em equilíbrio é
condição necessária que o centro de suspensão e o
centro de gravidade estejam na mesma vertical.
Podemos considerar os três tipos de equilíbrio:
1. Estável: o centro de gravidade está abaixo
do centro de suspensão.
2. Instável: o centro de gravidade está acima
do centro de suspensão.
3. Indiferente: o centro de gravidade coincide
com o centro de suspensão.
Exemplos :
a) Interfixa: quando o ponto de apoio está
entre a força potente e a força resistente.
Exemplos: balanças, tesouras, alicates etc.
A
apoio
O
FP
B
FR
b) Interpotente: quando força potente está
entre o ponto de apoio e a força resistente.
Exemplos: pinça, pegador de gelo, martelo
tirando um prego, a mandíbula etc.
B
FP
FR
A
Estável
Instável
Indiferente
O
apoio
Máquinas simples
EM_V_FIS_011
Máquinas são aparelhos ou instrumentos destinados a modificar ou transmitir a ação de forças.
c) Inter-resistente: quando força resistente
está entre o ponto de apoio e a força potente.
Exemplos: carrinho de mão, quebra-nozes, pé
humano na ação de andar etc.
Esse material é parte integrante do Aulas Particulares on-line do IESDE BRASIL S/A,
mais informações www.aulasparticularesiesde.com.br
5
FP A
B
apoio
FR
A roldana móvel se comporta como uma alavanca
inter-resistente onde o braço da potência vale o dobro
do braço da resistência e, portanto, sua VM é 2.
Podemos considerar as roldanas associadas em
grupos de fixas e móveis:
Talha, cadernal ou moitão:
O
A condição de equilíbrio em alavancas implica
FP x AO = FR x BO onde AO é chamado braço
da potência e BO é chamado braço da resistência.
Observa-se então que a VM está relacionada
com a relação entre os braços: quanto maior a razão
entre o braço da potência e o braço da resistência,
maior será a VM.
2. Roldanas: consta, basicamente, de uma roda
rígida que gira em torno de um eixo; a roda apresenta um fulcro por onde passa um fio. Podemos
considerar duas possibilidades de aplicação:
FP
FR
a) Fixa: quando o eixo não sofre movimento
de translação.
B
O
FR
A
→
FP
FP
A roldana fixa se comporta como uma alavanca
interfixa de braços iguais e portanto sua VM é 1.
b) Móvel : quando o eixo sofre movimento de
translação
FP
→
FR
O
A
Nessa associação temos: VM=2n, onde n é o
número de roldanas móveis; na primeira figura n=3
e na segunda figura n=2.
FR
6
Esse material é parte integrante do Aulas Particulares on-line do IESDE BRASIL S/A,
mais informações www.aulasparticularesiesde.com.br
EM_V_FIS_011
B
Talha exponencial:
Sarilho ou cabrestante
Consta de um cilindro solidário a uma manivela; uma corda é enrolada no cilindro e levanta um
peso.
FP
r1
FP
r2
FR
Nessa associação temos: VM = r1
r2
3. Plano inclinado: é um plano rígido que forma
um ângulo diferente de 0º com a horizontal;
é geralmente usado como parafuso ou como
uma cunha.
FR
Nessa associação temos: VM=2n , onde n é o
número de roldanas móveis; na figura n=3 e, então,
VM=23=8.
Talha diferencial:
A cunha é um prisma reto de base triangular
e transmite força; a força potente é aplicada
em uma face e as forças resistentes são transmitidas pelas faces laterais.
FP
r1
r2
FP
F R1
Teremos VM =
2
1
2 SEN
F R2
2
FR
EM_V_FIS_011
→
1
Nessa associação temos: VM =r12r
– r2 onde r1 é
o raio da polia maior superior e r2 é o raio da polia
menor superior.
1. (Cesgranrio) Uma força F , de módulo 1,0 . 10–4 N,
está aplicada em um ponto A, que dista 10cm de outro
ponto B.
Esse material é parte integrante do Aulas Particulares on-line do IESDE BRASIL S/A,
mais informações www.aulasparticularesiesde.com.br
7
→
F
A
B
→
Sabendo-se que a perpendicular à força F , baixada
pelo ponto B, encontra a mesma
em um ponto situado
→
a 6,0cm de A, o momento de F em relação ao ponto B
vale, em m . N:
a) 8,0 x 10 –4
figura 2
b) 6,0 x 10 –4
c) 8,0 x 10
Supondo que este segundo parafuso esteja tão apertado
quanto o primeiro, e levando em conta as distâncias
indicadas nas figuras, verifique se a moça consegue
soltar esse segundo parafuso. Justifique sua resposta.
–6
d) 6,0 x 10 –3
e) 3,0 x 10 –6
``
``
Solução:.
Solução:
Mrapaz = F
→
x
d como d = 0,20m
C será o ponto sobre F no pé da perpendicular
Mrapaz = 75 x 0,20
AC = 6cm
Mmoça = F
AB = 10cm
—
MF = F . BC
→
→
BC = 8cm = d
→
MF =1,0 . 10–4 . 8 . 10–2
→
MF =8,0 . 10–6 N . m
2. (UFRJ) Um jovem e sua namorada passeiam de carro
por uma estrada e são surpreendidos por um furo num
dos pneus. O jovem, que pesa 75 kgf, pisa a extremidade
de uma chave de roda, inclinada em relação à horizontal, como mostra a figura 1, mas só consegue soltar o
parafuso quando exerce sobre a chave uma força igual
a seu peso.
x
Mrapaz =15m kgf
d como d = 0,30m
Mmoça = 51 x 0,30 Mmoça =15,3m kgf
A moça encontra maior facilidade para soltar o parafuso
porque está exercendo momento maior.
3. (Cesgranrio) Querendo-se arrancar um prego com
um martelo, conforme mostra a figura, qual das forças
indicadas (todas elas de mesmo módulo) será mais
eficiente, na posição indicada?
A namorada do jovem, que pesa 51kgf, encaixa a mesma
chave, mas na horizontal, em outro parafuso, e pisa a
extremidade da chave, exercendo sobre ela uma força
igual a seu peso, como mostra a figura 2.
8
Esse material é parte integrante do Aulas Particulares on-line do IESDE BRASIL S/A,
mais informações www.aulasparticularesiesde.com.br
EM_V_FIS_011
figura 1
``
a) A
d) D
Como a barra não está sofrendo translação, sua resultante é nula; existindo três forças para baixo de módulos
30, 20 e 50N, as reações dos apoios RA e RB devem ser
tais que
e) E
RA + RB = 30 + 20 + 50 = 100N
Solução:
Como a barra também não sofre rotação, o momento
total, em relação a qualquer ponto deve ser nulo; vamos
considerar o momento em relação ao ponto A;
b) B
c) C
``
Solução:
O momento será máximo quando a força estiver perpendicular ao braço de alavanca;
total
=
RA
+
RB +
20
+
30
+
50
Em relação a esse ponto A, a reação do apoio RA não
gera momento, pois seu braço de alavanca é nulo; as
forças 20, 30 e 50 produzem movimento no sentido
horário e a reação do apoio B gera momento no sentido
anti-horário; então:
O = O + RB x 4 – 20 x 2 – 30 x 1 – 50 x 4,5
ou RB x 4 = 40 + 30 + 225 e portanto
RB = 295 ou RB = 73,75
4
Como os dados foram apresentados com dois algarismos
significativos RB = 74N e sabendo-se que
braço de alavanca
Observando com cuidado podemos notar que a força
representada pela letra C está perpendicular ao cabo
do martelo, mas não ao braço da alavanca: a força
que produz momento mais eficaz é a representada
pela letra D.
RA+ RB = 100N
vem
RA = 26N
5. (EN) Calcular a menor força que aplicada à roda de 100N
da figura faz com que ela galgue o degrau de 20cm de
altura. O raio da roda é 50cm.
R
4. Na figura abaixo, a barra está parada, suportada por dois
apoios e tem peso desprezível. Determine as reações
nos apoios A e B.
a) 20N
0,5m
4,0m
b) 40N
c) 80N
A
d) 50N
B
2,0m
e) 30N
20N
1,0m
``
30N
50N
Como o exercício pede a força mínima, deveremos
considerar o braço de alavanca máximo; para a roda
galgar o degrau, ela girará em torno do ponto O (contato entre a roda e o degrau) e o braço de alavanca
máximo, em relação a esse ponto, será o diâmetro
da roda.
EM_V_FIS_011
Determine as reações nos apoios A e B.
Solução:
Esse material é parte integrante do Aulas Particulares on-line do IESDE BRASIL S/A,
mais informações www.aulasparticularesiesde.com.br
9
total
F
R
P
x
50
O
R cotovelo
+
Fm
+
Pesfera
O momento gerado pelo apoio do cotovelo é nulo
(braço de alavanca = 0), o momento gerado pelo
bíceps é positivo (sentido anti-horário) e o momento gerado pelo peso da esfera é negativo (sentido
horário)
C
y
=
20
0 = 0 + Fm x 4 – 60 x 32 ou
Admitindo-se a situação limite que é o equilíbrio, podemos dizer que | MF | = | Mp| e portanto F . 2R =
P . x ou F . 2 . 50 = 100 . x; observa-se pela figura acima
que y = 50 – 20 = 30cm e no triângulo retângulo de R, y
e x; R2 = y 2 + x 2, portanto 502 = 302 + x2 ou x = 40cm.
Fm x 4 = 1 920 e portanto
Fm = 1 920 ou Fm = 480
4
Como um dos dados foi apresentado com um algarismo significativo Fm = 5 x 102N.
Então F . 100 = 100 . 40 ou F = 40N
Letra B
1. (AMAN) Um ponto é solicitado por duas forças, sendo
uma de 60N e outra de 80N. A força resultante tem
intensidade:
6. (UFRJ) Considere o esquema abaixo que representa
um antebraço na posição horizontal formando um
ângulo de 90º com o braço.
a) 140N, necessariamente.
b) 20N em qualquer caso.
c) 100N se as componentes forem normais uma à outra.
d) obrigatoriamente diferente de 80N.
e) nenhuma das anteriores.
Fm
2. (Associado) Um sistema de várias forças coplanares
apresenta a soma vetorial igual a R e o momento resultante do sistema em relação a um ponto do mesmo
plano, igual a Q. Assinale em qual das condições abaixo
é possível afirmar que o sistema de forças equivale a
um binário.
Fg
32cm
b) |R | ≠ 0 e |Q| ≠ 0
``
Solução:
Imóvel implica em não haver rotação nem translação.
Então, o cotovelo exercerá uma reação de apoio, a
força F m exercerá força para cima e a esfera, através
do peso, exercerá força para baixo.
Fazendo o momento dessas forças em relação ao
cotovelo (ponto O)
10
c) |R | ≠ 0 e |Q| = 0
O músculo bíceps exerce uma força F m a 4cm do
cotovelo e a mão sustenta uma esfera de peso
60N, a 32cm do cotovelo. Considerando-se o peso
do antebraço desprezível, qual deve ser o valor da
força exercida pelo bíceps para manter o antebraço
imóvel?
a) |R | = 0 e |Q| = 0
4cm
d) |R | = 0 e |Q| ≠ 0
e) |R | pode ser ou não igual a zero, mas |Q| ≠ 0.
3. (FAU) A intensidade da resultante de duas forças:
a) é sempre maior que a intensidade de qualquer das
componentes.
b) é sempre igual à soma das intensidades das componentes.
c) pode ser igual à metade da soma das intensidades
das componentes.
d) pode ser igual à soma dos quadrados das intensidades das componentes.
e) nenhuma das anteriores.
Esse material é parte integrante do Aulas Particulares on-line do IESDE BRASIL S/A,
mais informações www.aulasparticularesiesde.com.br
EM_V_FIS_011
60N
4. (UERJ) A figura mostra o braço de um homem apertando um parafuso com uma chave de boca de 0,20m de
comprimento.
Então, a força de resistência ao movimento da porca em
torno do parafuso vale, aproximadamente :
a) 200N
b) 300N
c) 400N
d) 500N
e) 600N
7.
(Cesgranrio) As forças F 1, F 2, F 3, F 4 e F 5 representadas
na figura, têm todas o mesmo módulo.
0,20m
Para dar o aperto final, fazendo a porca girar em torno do
eixo que passa por seu centro, é necessário um momento de
100N.m em relação ao eixo. Estando a ferramenta na
horizontal, o valor mínimo do módulo da força vertical que
o homem precisa exercer na extremidade da chave é :
a) 100N
b) 150N
Qual delas tem o momento de maior módulo, em relação
ao ponto O?
a) F 1
c) 200N
b) F 2
d) 300N
c) F 3
e) 500N
5. (PUC) Qual das grandezas abaixo é dimensionalmente
homogênea ao momento de uma força?
d) F 4
e) F 5
8. (UFF) Para derrubar o poste da figura, qual dentre os homens, puxando sozinho, executaria o menor esforço?
a) Velocidade.
b) Aceleração.
c) Trabalho.
d) Força.
e) Volume.
6. (PUC) Para se conseguir girar a porca no parafuso, na
situação esquematizada na figura, é necessário aplicar
na extremidade A da chave, uma força F de módulo, no
mínimo, igual a 8,0N.
A
B
C
D
E
a) A
b) B
c) C
EM_V_FIS_011
30
m
d) D
diâmetro do parafuso: ∅ = 1,2cm
e) E
9. (EMC) Um corpo está sujeito a um sistema de três forças
concorrentes. As intensidades de duas são 5N e 20N .
Quanto à intensidade da terceira força F, para que haja
equilíbrio, deve satisfazer a desigualdade:
Esse material é parte integrante do Aulas Particulares on-line do IESDE BRASIL S/A,
mais informações www.aulasparticularesiesde.com.br
11
a) F ≤ 5N
A
b) 5N ≤ F ≤ 20N
α
c) F ≤ 25N
B
d) 15N ≤ F ≤ 25N
e) F ≤ 25N
10. (PUC) A força que deve ser aplicada em A, para equilibrar a carga de 200N é de:
Mg
Mg
a) sen α e tg α
Mg
b)
e Mg tg α
cos α
c) Mg sen α e Mg cos α
d) Mg cos α e Mg sen α
13. (MACK) Uma esfera pesando P = 50 3 N está apoiada
numa parede sem atrito e mantida nessa posição por
um plano inclinado também sem atrito, que forma um
ângulo de 60º com o plano horizontal.
200N
a) 10N
b) 20N
c) 30N
d) 40N
e) 50N
11. (Associado) Um quadro pesado deve ser suspenso por
meio de uma corda cujas extremidades se prendem a dois
pontos A e B de lados opostos do quadro distanciados
de 1m.
Podemos afirmar que as intensidades de N e F valem,
res­pectivamente :
a) N = 80 3 N, F = 100N
b) N = 100 3 N, F = 150N
c) N = 500N, F = 200 3 N
d) N = 400 3 N, F = 50 3 N
e) N = 100N, F = 80 3 N
1m
14. (AFA) Considere sistema abaixo, onde o corpo suspenso
está em equilíbrio
Haverá maior segurança, isto é, menos perigo da corda
arrebentar se for usada uma corda de comprimento:
a) 1,2m
b) 1,4m
c) 1,6m
Se o seu peso fosse a metade do que é, então:
a) a tração no fio AB dobra.
e) 2,0m
12. (AFA) No sistema da figura abaixo, em equilíbrio estático,
um corpo de massa M está suspenso por fios inextensíveis, de massa desprezível. As tensões nos fios OA e
OB valem, respectivamente:
12
b) a tração no fio BC reduz-se à metade e a tração em
AB não se altera.
c) as trações nos fios AB e BC ficam reduzidas ao
meio.
d) o corpo deixa de estar em equilíbrio.
Esse material é parte integrante do Aulas Particulares on-line do IESDE BRASIL S/A,
mais informações www.aulasparticularesiesde.com.br
EM_V_FIS_011
d) 1,8m
15. (FEI) Sobre um ponto material atuam simultaneamente
três forças de intensidades 30N, 40N e 50N. Sabendo
que o corpo está em equilíbrio podemos afirmar que:
a) as três forças têm a mesma direção.
b) há necessariamente mais uma força atuando sobre
esse ponto.
c) cada uma das três forças é normal às outras duas.
d) não havendo outra força atuante, o ângulo entre a
força de 30N e a de 40N será 90°.
e) nenhuma das anteriores.
16. (Cesgranrio) A figura representa uma escada apoiada
contra uma parede, com duas forças que atuam sobre
ela: o peso P e a força E ,exercida pela parede.
O vetor que melhor representa a força exercida pelo
pino M, sobre a barra é:
a) A
b) B
c) C
d) D
e) E
2. (Vunesp) Justifique por que uma pessoa, sentada conforme a figura, mantendo o tronco e as tíbias na vertical
e os pés no piso, não consegue se levantar por esforço
próprio.
Entre os cinco vetores propostos a seguir, qual
representa a força exercida pelo chão sobre a escada,
para que ela permaneça em equilíbrio?
E
P
Se julgar necessário, faça um esquema para auxiliar sua
explicação.
3. (PUC) Determine graficamente o ponto de aplicação da
força resultante das forças aplicadas:
a) A
b) B
c) C
d) D
a)
EM_V_FIS_011
e) E
1. (EELINS) No esquema abaixo, representa-se uma barra
rígida e homogênea, apoiada em um degrau N, e que
pode girar em torno do pino M.
Esse material é parte integrante do Aulas Particulares on-line do IESDE BRASIL S/A,
mais informações www.aulasparticularesiesde.com.br
13
b)
d) 30kgf
e) 60kgf
6. (UERJ) Um bloco de massa M = 5,0kg está preso a um
fio ideal, que passa sem atrito por uma roldana também
ideal de raio R2 = 10cm e que é dotada de uma manivela.
Uma força F é aplicada perpendicularmente ao braço da
manivela a uma distância R 1 = 50cm do centro da roldana,
conforme indica a figura abaixo:
4. (PUC) Um cilindro homogêneo de raio R está apoiado
no solo no ponto M, e sobre o degrau no ponto N, de
altura h. Sobre ele, no ponto A, atua uma força F , horizontal para a direita, que coloca o cilindro na iminência
de movimento. A figura abaixo ilustra essa situação:
F
A força que a superfície exerce sobre o cilindro nos pontos
M e o momento no ponto N são, respectivamente:
2P
a)
e mgR
1 + 2 cosθ
7.
b) 0 e 0
c) mgR e
Girando-se a manivela de modo tal que o bloco suba com
aceleração constante de intensidade 2,0m.s–2, calcule a
tração no fio e a força F.
Dado: aceleração da gravidade: g = 10m. s–2.
(PUC) Determine o momento das três forças abaixo em
relação ao ponto O. (OA = 2,0m)
F1 = 60N
2P
1 + 2 cosθ
d) mgR e 0
60o
0
e) mgh e mgh senθ
o
F2 = 100N
5. (Cesgranrio)
0,50m
1,00m
A
45o
F3 = 100N
8. (PUC) Com relação à questão anterior, qual a rotação
produzida pelas forças F 1, F 2 e F 3, no sentido horário
ou no anti-horário? Justificar.
A figura acima ilustra uma prensa para fabricação caseira
de queijo. Sabendo-se que o queijo deve ser prensado
na forma com uma força de 30kgf, quanto deve valer o
peso do objeto P ? (Despreze o peso da barra).
a) 10kgf
b) 15kgf
c) 20kgf
14
9. Muitas lesões no joelho, ocorrem, principalmente no
futebol, quando um jogador é “calçado” por trás. Nesse
momento, são aplicadas inúmeras forças. Entretanto,
serão consideradas apenas duas forças de mesma intensidade (uma nos artelhos e outra no calcanhar, local
do ‘calço’), paralelas e de sentidos contrários. Supondo
o pé em sua extensão, como um segmento de reta
perpendicular aos pontos de aplicação das forças que
atuam nas extremidades do pé. Explica-se esse sistema
Esse material é parte integrante do Aulas Particulares on-line do IESDE BRASIL S/A,
mais informações www.aulasparticularesiesde.com.br
EM_V_FIS_011
físico através do(a):
a) 500.
a) torque ou binário.
b) 750.
b) 1.ª lei de Newton.
c) 1 000.
c) 2.ª Lei de Newton.
d) 1 250.
d) 3.ª lei de Newton.
e) Lei de Hooke.
10. (AMAN) Qual a menor força que se deve aplicar à
roda de peso P e raio R para que ela possa galgar o
degrau de altura h?
13. (Fuvest) Uma balança tem braços não exatamente
iguais, embora seu travessão fique horizontal quando
descarregado. Quando um corpo é colocado no prato
direito, uma massa Me deve ser colocada no prato esquerdo para que haja equilíbrio; se, entretanto, o corpo
é colocado no prato esquerdo, para que haja equilíbrio
deve-se colocar uma massa Md no prato direito. Pode-se
então concluir que a massa verdadeira do corpo é:
M .M
a) M e+ Md e
d
11. (EN) Um cilindro homogêneo de peso igual a 100N
apoia-se sobre uma parede vertical lisa (sem atrito) e sobre um plano inclinado de 60º em relação à horizontal.
b)
Me + Md
2
c)
Me . Md
d)
M2e + M2d
2
14. (EN) A barra AB é uniforme, pesa 80N e tem 12m
de comprimento. O bloco D pesa 50N e dista 10m
de A. A distância entre os pontos de apoio da barra é
AC = 8m. O módulo da reação do apoio A, em newtons,
é igual a :
Sabendo-se que o coeficiente de atrito entre o cilindro e o
plano inclinado é igual a 0,2, o módulo da força (em newtons)
que a parede vertical exerce sobre o cilindro é de:
a) 100
b) 200
a) 6,0
c) 200 3
b) 7,5
d) 120 3
c) 20
e) 100 3
d) 32,5
12. (AFA) Na figura, o rolo G tem peso 1 000N e raio 15cm. O
obstáculo tem altura de 3cm. Calcule o valor da força horizontal F, em N, para que haja a iminência de movimento.
e) 40
15. (EN) Na configuração a seguir tem-se uma esfera maciça, homogênea e uniforme de peso P , em equilíbrio
estático entre dois planos inclinados. Sabendo-se que:
I. O módulo da força F A é de 200N.
II. O módulo da aceleração da gravidade é de 10m/s2.
EM_V_FIS_011
III. Os atritos são desprezíveis.
Esse material é parte integrante do Aulas Particulares on-line do IESDE BRASIL S/A,
mais informações www.aulasparticularesiesde.com.br
15
18. (Fuvest) Uma escada de peso P = 80N e comprimento
6 metros, encontra-se apoiada pelas suas extremidades
sobre dois planos, um horizontal (rugoso) e outro (perfeitamente liso), conforme a figura.
Pode-se afirmar que a massa, em quilogramas, da esfera é:
a) 10
b)
20 3
3
c)
40 3
3
d) 20 3 Determine:
a) as reações normais de apoio nos pontos A e B;
e) 60
b) a força de atrito no ponto B.
16. (Elite) Uma barra homogênea de peso 100N é articulada
em A e é mantida em equilíbrio por meio do fio BC. Em
B é suspenso um peso de 200N.
19. (F. CARLOS CHAGAS) O coeficiente de atrito estático
entre um bloco homogêneo e um plano inclinado vale
0,80. O bloco é colocado em repouso sobre o plano,
cuja inclinação vai sendo aumentada a partir de 10°
com a horizontal.
Determine a intensidade da força que traciona o fio BC e
a reação do pino A (componente vertical e horizontal).
17. (Elite) A barra indicada BD é mantida horizontalmente
pela corda AC e é articulada em B.
A inclinação máxima do plano, sem que o bloco deslize
ou tombe, é tal que a razão h/l vale:
a) 1/6
b) 1/4
c) 1/3
d) 1/2
e) 0,8
16
21. (MACK) Na figura a seguir, a barra homogênea de peso
P é mantida em equilíbrio, com o extremo B apoiado
numa parede lisa e com o extremo A preso pela corda
AC.
Esse material é parte integrante do Aulas Particulares on-line do IESDE BRASIL S/A,
mais informações www.aulasparticularesiesde.com.br
EM_V_FIS_011
Qual a reação de apoio do pino (componente vertical e
horizontal) e qual a tração na corda, sendo desprezível o
peso da barra?
20. (Unicamp-Adaptado) As escadas usadas em casa têm
sempre pés de borracha. A parte superior delas, a que
encosta na parede, pode ter ou não as proteções de
borracha. Demonstre que, para a situação de equilíbrio, é
necessária força de atrito com o chão, mas com a parede
vertical não é necessária a existência de atrito.
Sendo BC = 2m e o comprimento da barra AB = 4m,
podemos afirmar que o comprimento da corda vale,
aproximadamente:
a) 5,3m
b) 4,3m
c) 6,3m
d) 3,3m
EM_V_FIS_011
e) 7,3m
Esse material é parte integrante do Aulas Particulares on-line do IESDE BRASIL S/A,
mais informações www.aulasparticularesiesde.com.br
17
16. B
1. C
3. C
4. E
5. C
6. C
7.
C
8. E
1. C
2. Com as tíbias na vertical, a normal N1 de apoio no solo
não pode exercer momento no joelho (figura 1). Esse
momento só pode existir com as pernas flexionadas
(figura 2).
b
fig 1
9. D
P
10. E
11. E
12. A
b
N1
13. B
14. C
15. D
18
a
Esse material é parte integrante do Aulas Particulares on-line do IESDE BRASIL S/A,
mais informações www.aulasparticularesiesde.com.br
P
fig 2
N1
EM_V_FIS_011
2. D
3.
a) Traça-se F1 sobre F2 e F2 sobre F1 e unem-se as extremidades. O ponto de intersecção F1 determina a
posição da resultante.
P
2R h – h2
2R
F=
11. E
12. B
13. C
A
B
14. B
15. C
16. T = 1 250 N
3
F1
F2
FR
Vamos passar
invertida.
2
para A e
1
para B, esta última,
18. a) NA =
b) fatrito B =
40 3
N ; N B = 80N
3
40 3
N
3
19. D
20. Vamos fazer um esquema:
FR
l
O
Parede
fatrito parede
O
A
B
Nparede
R
Unindo-se as extremidades das forças pela linha
pontilhada, observamos que ela corta a barra no ponto
O, que é o ponto de aplicação da resultante dessas
duas forças.
4. B
escada
P
5. A
7.
RAY = 50N
17. R BX = 150N R BY = 100N
F2
F2
6. T = 60N
RAX = 1 000 N
3
Nchão
fatrito chão
F = 12N
O
chão
Para equilíbrio: Σ forçasx = 0 e Σ forçasy = 0
MF1 = 60 3 m.N
8. M F2 = 0 M F3 = 100 2 m.N.
9. Mres = 20 (5 2 – 3 3 )m.N no sentido horário.
10. A menor força acontecerá quando o braço de alavanca
for máximo, isto é, a força deverá ser aplicada no ponto
diametralmente oposto ao ponto de contato do degrau;
para a roda galgar esse degrau, M F deverá ser ligeiramente maior que o M P:
Atendendo à 1.ª condição: no eixo x | F atrito chão |
= |Nparede|, donde concluímos que se | F atrito chão| = 0 não
há equilíbrio.
Atendendo à 2.ª condição: no eixo y | F atrito parede| + |Nchão|
= | P |, portanto, se | F atrito parede| = 0 pode haver equilíbrio,
desde que |Nchão| = | P |.
21. A
F
EM_V_FIS_011
R
R–h
y
P
h
Esse material é parte integrante do Aulas Particulares on-line do IESDE BRASIL S/A,
mais informações www.aulasparticularesiesde.com.br
19
EM_V_FIS_011
20
Esse material é parte integrante do Aulas Particulares on-line do IESDE BRASIL S/A,
mais informações www.aulasparticularesiesde.com.br