CONSTRUÇÃO E CARACTERIZAÇÃO DE UM
ATUADOR PIEZOCERÂMICO
Paulo Roberto Bueno de Carvalho1 ,Paulo Jorge Brazão Marcos2
1
Tecnólogo em MPCE da FATEC-SP
2
Prof. Dr. do curso de Mecânica de Precisão da FATEC-SP
[email protected], [email protected]
Resumo
Atualmente, diversos sistemas automatizados
exigem um alto grau de precisão (com escalas da ordem
de alguns micra a nanômetros) como ocorre em sistemas
mecânicos utilizados para efetuar posicionamento de
amostras, controle de posicionamento de pontas de
prova para análise e caracterização elétrica de
dispositivos, entre outras aplicações. Todos estes
sistemas de posicionamento têm como dispositivo
fundamental um atuador, dispositivo que produz
movimento, atendendo a comandos que podem ser
manuais ou automáticos. Este trabalho teve como
objetivo realizar a confecção de um atuador linear
utilizando um material piezoelétrico, no caso, o
Titanato-Zirconato de Chumbo (PZT). Verificou-se,
através de medidas de interferometria a laser, que o
dispositivo final apresentou um grau de resolução da
ordem de nanômetros.
Palavras-chave: atuador, piezoeletricidade, PZT,
precisão.
1. Introdução
Os atuadores piezocerâmicos oferecem para
engenheiros e cientistas uma maneira prática de
conseguir
níveis
extremamente
precisos
de
posicionamento, tempos de resposta mais curtos, melhor
operação dinâmica e maiores forças de atuação numa
grande variedade de aplicações [1].
Atualmente os sistemas de movimento baseados em
atuadores piezocerâmicos substituem cada vez mais as
tecnologias clássicas empregadas nestas aplicações,
como
válvulas
eletromagnéticas,
atuadores
pneumáticos, motores elétricos lineares, melhorando os
produtos em termos de miniaturização, precisão e tempo
de resposta [2].
Como o efeito piezoelétrico observado em materiais
naturais monocristalinos como o quartzo, a turmalina, o
sal de Rochelle, entre outros, é muito pouco intenso,
foram desenvolvidos materiais cerâmicos piezoelétricos
policristalinos como o Titanato-Zirconato de Chumbo
(conhecido como PZT), com propriedades melhoradas
[1, 3]. As cerâmicas PZT estão disponíveis em muitas
variações e são extensamente utilizadas hoje em
aplicações que empregam atuadores piezocerâmicos [1].
Os dispositivos atuadores piezocerâmicos, no
sentido físico, fazem uso da deformação de um material
piezoelétrico quando um campo elétrico é aplicado
sobre este, para promover deslocamentos de cargas de
pequeno a grande porte e em alta resolução, em escala
de nanômetros, variando com as dimensões do atuador,
a estrutura do dispositivo e as características da
cerâmica PZT [4]. A alta resolução da mudança no
comprimento e a grande capacidade de carga da
cerâmica piezoelétrica são particularmente interessantes
nos campos de alta tecnologia (semicondutores, óptica,
telecomunicações, etc.), e também, numa extensão
crescente, na área automotiva (sistemas de injeção de
combustíveis, microválvulas, etc.) [1].
Tendo tais aplicações como cenário motivador, foi
proposto neste trabalho o projeto e a respectiva
construção de um atuador piezocerâmico, utilizando as
propriedades oferecidas pelo PZT, analisando a
influência da geometria de construção da cerâmica
sobre as características mecânicas a serem obtidas do
atuador final.
2. Procedimento Experimental
O projeto do atuador foi efetuado utilizando 6 discos
de cerâmica piezoelétrica PZT, de diâmetro de 35 mm
por 2 mm de espessura com eletrodos em ambas as
faces, compostos de uma liga Cobre-Níquel (CuNi)
(Figura 1). Os discos foram doados pela empresa PI
Ceramic, com sede na Alemanha.
Figura 1 - Fotos dos discos doados pela PI Ceramic
Para o dimensionamento do atuador construído,
utilizou-se a expressão para dimensionamento de um
atuador piezocerâmico multicamadas, dada pela
equação (1):
ΔL ≈ d 33 • n • U
(1)
onde:
ΔL = deslocamento [m]
d33 = coeficiente de deformação mecânica (campo
elétrico e deslocamento na direção de polarização)
[m/V]
Boletim Técnico da FATEC-SP - BT/ 28 – pág. 10 a 14 – Abril / 2010
10
n = número de discos cerâmicos
U = tensão de operação [V]
Como não foi possível conseguir uma fonte de alta
tensão disponível para efetuar os testes de
funcionamento do atuador acima, foi construída uma
fonte de alta tensão ajustável com saída de tensão
contínua de 0 a 1000 V aproximadamente (para uso em
rede elétrica de 220 V - tensão alternada) e com saída
ajustável de 0 a 590 V (tensão contínua) quando usado
em rede elétrica de 127 V (tensão alternada), ambas as
condições para uma corrente de saída baixa (até 250
mA).
Feita a montagem do circuito para o controle do
atuador piezocerâmico, foi efetuada a montagem do
atuador na configuração tipo multicamadas, ou em pilha
(stack actuator).
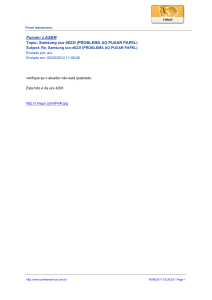
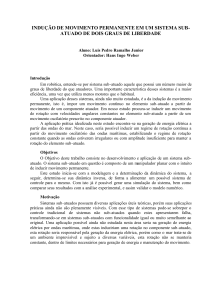
Entre os discos foram colocados espaçadores
metálicos para poder haver espaço para colocar os
contatos que efetuam a polarização dos discos, como
mostra a figura 2. Os espaçadores e os discos foram
fixados utilizando uma cola condutiva à base de prata,
para poder haver o contato elétrico entre os discos
cerâmicos pelos eletrodos e fixar a estrutura ao mesmo
tempo.
Figura 2 - Discos piezocerâmicos com espaçadores
metálicos montados.
Cada disco foi posicionado sobre a pilha de forma
que a face onde se encontra o eletrodo positivo (eletrodo
avermelhado) fosse colocada em contato com o eletrodo
positivo do outro disco e da mesma forma o eletrodo
negativo em contato com o eletrodo negativo do disco
posterior, até ser completada a pilha, formando um
atuador multicamadas contendo 6 discos.
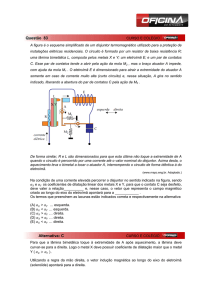
Em seguida, foram fixados os contatos com a fiação
para aplicar a polarização nos discos paralelamente,
onde cada contato feito através de um terminal tipo
forquilha foi fixado em cada eletrodo utilizando a cola
condutiva, formando a estrutura ilustrada pela figura 3.
Os terminais que estão ligados ao fio preto são
polarizados negativamente e os terminais fixados com
fio vermelho são ligados na saída positiva da fonte de
tensão utilizada.
Depois de feita a montagem, foi deixada para cura o
material durante 24 horas para poder secar a cola e
manter a estrutura estável. A partir de então, foram
realizados os testes com o atuador montado.
Figura 3 - Parte ativa do atuador piezocerâmico
montado com os terminais.
3. Testes de acionamento do atuador e
obtenção de medidas
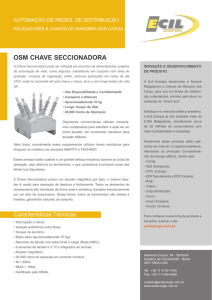
Para efetuar a medida de deslocamento do atuador
piezocerâmico
construído,
foi
montado
um
interferômetro de Michelson (figura 4), onde o espelho
móvel é o que se encontra sobre o atuador
piezocerâmico da figura 3. O feixe de laser He-Ne, cujo
comprimento de onda é de aproximadamente 632 nm, é
direcionado ao atuador que se encontra na posição
vertical através de um espelho posicionado a um ângulo
de aproximadamente 45º para desviar o feixe para o
espelho que se encontra no atuador e retransmitir o feixe
ao divisor de feixes.
Os feixes de laser refletidos seguem em direção à
lente do anteparo, que ao atravessar esta lente atinge
uma folha de papel sulfite posicionada no outro lado do
laboratório alinhada a esta lente, servindo como
anteparo.
Figura 4 – Diagrama do Interferômetro de Michelson.
Os espelhos foram ajustados até que fossem
observadas na folha de sulfite, as franjas de
Boletim Técnico da FATEC-SP - BT/ 28 – pág. 10 a 14 – Abril / 2010
11
interferência dos dois feixes de laser refletido para o
anteparo, conforme ilustrado na Figura 5.
Este deslocamento de franjas observado ocorre em
função do deslocamento do espelho que se encontra
sobre o atuador piezocerâmico (figura 3), o qual desloca
este espelho numa variação dada por ΔL. Considerando
que para cada franja deslocada, há um deslocamento
igual a metade do comprimento de onda do laser (λ/2),
pode-se determinar a variação de deslocamento do
espelho por [5]:
ΔL =
Figura 5 – Franjas de interferência observadas.
Em seguida, ligou-se o atuador piezocerâmico à
fonte de alta tensão ajustável e entre ela e o atuador,
ligou-se um multímetro para monitorar a tensão que
estava sendo aplicada sobre o atuador.
Antes de iniciar o ajuste da tensão, marcou-se um
ponto na folha de sulfite sobre uma franja escura
presente na folha. Em seguida, iniciou-se o ajuste da
tensão através do potenciômetro de ajuste da fonte de
alta tensão. A tensão foi aumentada gradativamente,
observando-se o deslocamento das franjas de
interferência. No momento em que uma outra franja
escura se posicionasse sobre o ponto marcado, era
interrompido o aumento da tensão e anotava-se então o
valor da tensão observada naquele instante no
multímetro. Para verificar o padrão dos resultados, este
procedimento experimental foi repetido quatro vezes
sendo aferidas as tensões obtidas para cada
deslocamento, aplicando sobre o atuador tensões de 0 V
a 500 V.
λ
(2)
2
Baseado na equação 2, foi determinado o ΔL
experimental de acordo com o comprimento de onda do
laser utilizado, resultando em ΔL Experimental igual a
316,4 mm para uma variação de tensão aplicada igual a
100 V.
Calculando o ΔL Teórico através da equação 1 e
comparando com o ΔL Experimental, verificou-se uma
margem de erro de 5,5 %.
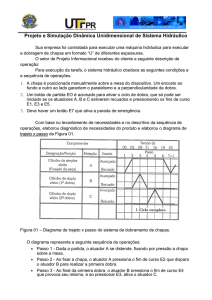
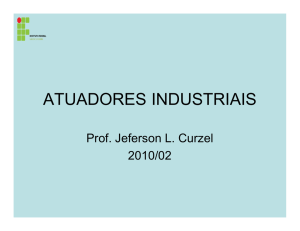
Através da variação da tensão medida sobre o
atuador (tabela I) e a variação de deslocamento obtida
através do cálculo de ΔL Experimental, construiu-se a
Tabela II correlacionando a variação de deslocamento
em função da variação de tensão, e, com base nos
resultados desta tabela, foi obtido o gráfico da Figura 6,
que mostra o comportamento do atuador montado:
Tabela II - Deslocamento obtido pelo atuador em
função da tensão aplicada.
Tensão
Deslocamento
medida sobre
efetuado pelo
atuador [m]
o atuador [V]
0
0
106
3,16E-07
210
6,32E-07
300
9,48E-07
405
1,26E-06
500
1,58E-06
Tabela I – Deslocamento de franjas em função da
variação de tensão.
Variação de tensão (V) Deslocamento da franja
(adimensional)
0 – 106
1 franja
106 – 210
1 franja
210 – 300
1 franja
300 – 405
1 franja
405 – 500
1 franja
-6
Através dos resultados observados visualmente pelo
deslocamento das franjas de interferência pelo anteparo
da figura 5 em função das tensões observadas no
multímetro, constatou-se que a cada variação de
aproximadamente 100 V deslocou-se uma franja de
interferência observada no anteparo. Foram observadas
as seguintes tensões para cada deslocamento de franja:
Deslocamento do atuador [10 m]
4. Resultados obtidos
1,80
1,60
1,40
1,20
1,00
0,80
0,60
0,40
0,20
0,00
0
100
200
300
400
500
600
Tensão medida sobre o atuador [V]
Figura 6 – Curva da variação de deslocamento do
atuador em função da variação de tensão [ΔL X V].
Pode-se determinar a força máxima suportada por
este atuador utilizando as equações [1,2]:
Boletim Técnico da FATEC-SP - BT/ 28 – pág. 10 a 14 – Abril / 2010
12
Fmax = k T • ΔL0
(3)
k T = Adisco • E
(4)
L0
onde:
Fmax = Força máxima suportada pelo atuador;
Módulo de elasticidade (E) = 27 GPa = 27 GN/m2
(parâmetro informado pelo fabricante, válido para
tensões altas [V > 100 V]);
ΔL0 = deslocamento máximo do atuador para tensão
igual a 500 Vdc, obtido experimentalmente;
L0 = Comprimento do atuador (altura) no estado inicial
(sem sofrer deformação).
Através destas equações, utilizando-se parâmetros
fornecidos pelo fabricante das cerâmicas, determinou-se
que a força máxima suportada pelo atuador é de 3419 N.
Considerando a aceleração da gravidade g:
g ≈ 9,8m / s 2
(5)
determinou-se que a massa da carga máxima suportada
por este atuador é de 348,8 kg.
Foi efetuado o cálculo da freqüência de ressonância
(equação 6) e através deste parâmetro pode-se obter o
tempo de resposta do atuador depois de aplicada uma
voltagem sobre o atuador, por meio da equação 7.
kT
⎛ 1 ⎞
f0 = ⎜
⎟•
meff
⎝ 2π ⎠
(6)
1
3 • f0
(7)
Tmin ≈
onde:
f0 = freqüência de ressonância [Hz]
kT = constante elástica do piezo atuador [N/m]
meff = massa efetiva do atuador (1/3 da massa total do
atuador) [kg]
Tmin = tempo de resposta do atuador [s]
A freqüência de ressonância calculada foi de 42,766
kHz e o tempo de resposta obtido foi de 7,8 µs. A
freqüência de ressonância e o tempo de resposta aqui
calculados devem ser considerados para um atuador sem
haver uma carga aplicada sobre o mesmo (figura 3).
Para poder calcular estes parâmetros, considerando uma
carga aplicada, devem-se considerar outros parâmetros
dependentes da carga que será aplicada, tais como a
massa efetiva da carga aplicada, se ela é constante ou
varia de acordo com o deslocamento aplicado pelo
atuador (considerando como carga uma mola) e a
constante elástica da carga.
5. Conclusões
Através dos dados obtidos, pode-se concluir que os
testes efetuados com o atuador piezocerâmico
multicamadas
desenvolvido
correspondem
às
expectativas obtidas na teoria durante o seu estudo,
obtendo-se um grau de precisão na resolução do sistema
de 3,2 nm/V (considerando um deslocamento de
aproximadamente 320 nm para cada 100 V aplicado,
valor obtido fazendo uma regressão linear sobre a curva
da variação de deslocamento em função da variação de
tensão aplicada no atuador), tendo uma estrutura estável
sem o encapsulamento, e obtendo resposta em tempo
rápido (aproximadamente 7,8 µs) e linear do
deslocamento conforme a variação da tensão, observado
através da curva variação de deslocamento vs. variação
de tensão, sendo praticamente imperceptível o tempo de
atraso na resposta de deslocamento em função da
variação de tensão linearmente.
Referências Bibliográficas
[1] Pi Ceramic. Piezoelectric Ceramic Products.
Lederhose, Germany, 2006. Disponível em:
http://www.piceramic.de/pdf/KATALOG_english.p
df.
[2] Physik Instrumente (Pi - Headquarter). Tutorial:
Piezoelectrics in Positioning. Karlsruhe/Palmbach,
Germany, 2005. Disponível em:
http://www.physikinstrumente.com/en/pdf_extra/PI
_designing_with%20piezo_actuators_tutorial_2005
c.pdf.
[3] F.J. Ramirez-Fernandez; H.E. Peres, Sensores:
Tecnologias e Aplicacoes - Vol .1 – CD. In: J. A.
Eiras. Materiais Piezoelétricos. 1. ed. São Paulo:
AlphaMidia Assessoria Fonográfica, 2004. Cap. 2.
1 CD ROM.
[4] PI CERAMIC.PIC Tutorial. Lederhose, Germany,
2006.Disponível em:
http://www.piceramic.de/pdf/PIC_Tutorial.pdf.
[5] D. Halliday; R. Resnick; J. Walker. Fundamentos
de Física – Óptica e Física Moderna. 6ª Edição.
Rio de Janeiro: LTC, 2003.
[6] S.L. Herdic, Development of Piezo-Hydraulic
Actuation Systems Technology for use on a
helicopter trailing edge flap. 2005. Tese (Degree
Master of Science in Mechanical Engineering) –
Georgia Institute of Technology, 2005.
[7] J.J.Lima Jr., Modelagem de Sensores e Atuadores
Piezoelétricos com Aplicações em Controle Ativo
de Estruturas. 1999. Tese (Doutorado em
Engenharia Mecânica) – Universidade Estadual de
Campinas (UNICAMP), Campinas, 1999.
[8] K.G Webber. Characterization of Actuation and
Fatigue Properties of Piezoelectric Composite
Actuators. 2005. Tese (Degree Master of Science
in Mechanical Engineering) – Georgia Institute of
Technology, 2005.
Boletim Técnico da FATEC-SP - BT/ 28 – pág. 10 a 14 – Abril / 2010
13
[9] WIKIPEDIA. Piezoelectricity. 2006. Disponível
em: http://en.wikipedia.org/wiki/Piezoelectric.
[10] R.C. Buchanan, Ceramic Materials for
Electronics:Processing,
Properties
and
Applications. In: G.H. Haertling, Piezoelectric
and Electrooptic Ceramics. 2. ed. New York:
Marcel Dekker Inc., 1991.cap. 3, p. 129-205.
[11] R.L. Boylestad; L. Nashelsky. Dispositivos
Eletrônicos e Teoria de Circuitos. 6ª Edição. Rio
de Janeiro: Prentice Hall do Brasil, 1998.
[12] Z. Yu; C. Ang; R. Guon; A.S. Bhalla. Dielectric
properties of Ba(Ti1 – xZrx)O3 solid solutions.
Materials Letters - Science Direct, Amsterdam,
2005, p. 1-4, April 2006.
Boletim Técnico da FATEC-SP - BT/ 28 – pág. 10 a 14 – Abril / 2010
14