ANÁLISE DA INFLUÊNCIA DE EFEITOS NÃO-LINEARES EM SISTEMAS DE
COLHEITA DE ENERGIA BASEADOS EM VIBRAÇÃO UTILIZANDO MATERIAIS
PIEZOELÉTRICOS
Ana Carolina Souza Cellular
Tese de Doutorado apresentada ao Programa de Pósgraduação em Engenharia Mecânica, COPPE, da
Universidade Federal do Rio de Janeiro, como parte
dos requisitos necessários à obtenção do título de
Doutor em Engenharia Mecânica.
Orientador: Marcelo Amorim Savi
Rio de Janeiro
Julho de 2016
ANÁLISE DA INFLUÊNCIA DE EFEITOS NÃO-LINEARES EM SISTEMAS DE
COLHEITA DE ENERGIA BASEADOS EM VIBRAÇÃO UTILIZANDO MATERIAIS
PIEZOELÉTRICOS
Ana Carolina Souza Cellular
TESE SUBMETIDA AO CORPO DOCENTE DO INSTITUTO ALBERTO LUIZ
COIMBRA DE PÓS-GRADUAÇÃO E PESQUISA DE ENGENHARIA (COPPE) DA
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COMO PARTE DOS REQUISITOS
NECESSÁRIOS PARA A OBTENÇÃO DO GRAU DE DOUTOR EM CIÊNCIAS EM
ENGENHARIA MECÂNICA.
Examinada por:
_______________________________________
Prof. Marcelo Amorim Savi, D.Sc.
_______________________________________
Prof.ª Luciana Loureiro da Silva, D.Sc.
_______________________________________
Prof. Pedro Manuel Calas Lopes Pacheco, D.Sc.
_______________________________________
Prof. Thiago Gamboa Ritto, D.Sc.
_______________________________________
Prof. Luciano Luporini Menegaldo, D.Sc.
RIO DE JANEIRO, RJ – BRASIL
JULHO DE 2016
Cellular, Ana Carolina Souza
Análise da Influência de Efeitos Não-Lineares em Sistemas
de Colheita de Energia Baseados em Vibração Utilizando Materiais
Piezoelétricos / Ana Carolina Souza Cellular. – Rio de Janeiro:
UFRJ/COPPE, 2016.
XIV, 72 p.: il.; 29,7 cm.
Orientador: Marcelo Amorim Savi
Tese (doutorado) – UFRJ/ COPPE/ Programa de Engenharia
Mecânica, 2016.
Referências Bibliográficas: p. 66-72.
1. Dinâmica não-linear. 2. Caos. 3.Colheita de Energia. 4.
Piezoeletricidade. 5. Duffing. I. Savi, Marcelo Amorim. II.
Universidade Federal do Rio de Janeiro, COPPE, Programa de
Engenharia Mecânica. III. Título.
iii
Á Deus, “Tudo posso naquele que me fortalece”.
Filipenses 4:13.
iv
AGRADECIMENTOS
Agradeço a Deus por estar sempre ao meu
lado. À minha filha Ana Clara, à
paciência, quando falava que passaria mais um final de semana estudando. Ao meu marido,
por não me deixar desistir quando a exaustão me invadia. E aos meus pais, por sempre
acreditarem em mim. Agradeço também, aos meus irmãos e sogros. Esta parceria foi de
grande incentivo.
A oportunidade de ter pessoas tão capacitadas no meu convívio diário nesses anos de
doutorado, certamente foi uma bomba impulsora. Principalmente os amigos que estiveram do
meu lado: Aline, Arantes, Bianca, Flavinho, Fernando, Larissa, Marina, Maurício, Pedro,
Sérgio, Thamires, Vandinho, Wandré. E todos os outros que fizeram parte dessa grande
família Mecanon.
Percebi que na vida aprende-se mais com às pessoas a sua volta do que com livros,
papers e teses. A troca é inevitável, e isto garante a ajuda mútua. No nosso laboratório os
fatores que predominam são sempre a ajuda aos que precisam, a motivação e o
compartilhamento de conhecimento e ideias. Isso só seria possível com um grande líder. Esse
líder deixa sua porta aberta todos os dias. E a espera, na maioria das vezes, é de dez ou mais
pessoas que querem soluções distintas sobre os mais diversos assuntos. Uma loucura!
Savi, sem sombra de dúvida, realmente acredito que não teria conseguido acabar a
tese sem a sua perseverança em mim. Obrigada por todos esses anos de dedicação e
comprometimento. E por me fazer acreditar que é possível educar para termos um país
melhor, que compartilhar nossos trabalhos para evolução do grupo é essencial. Obrigada
professor.
v
Resumo da Tese apresentada à COPPE/UFRJ como parte dos requisitos necessários para a
obtenção do grau de Doutor em Ciências (D.Sc.)
ANÁLISE DA INFLUÊNCIA DE EFEITOS NÃO-LINEARES EM SISTEMAS DE
COLHEITA DE ENERGIA BASEADOS EM VIBRAÇÃO UTILIZANDO MATERIAIS
PIEZOELÉTRICOS
Ana Carolina Souza Cellular
Julho/2016
Orientador: Marcelo Amorim Savi
Programa: Engenharia Mecânica
Colheita de energia é o processo pelo qual se utiliza a energia disponível no ambiente
para algum fim específico. Uma das formas que vem ganhando importância nos últimos anos
é a utilização da energia de vibração empregando materiais piezoelétricos para fazer o
acoplamento eletro-mecânico. Este trabalho investiga a influência de efeitos não-lineares na
colheita de energia à base de vibração. Um modelo arquétipo é utilizado considerando um
sistema mecânico com um grau de liberdade acoplado a um circuito elétrico através de um
elemento piezoelétrico. Efeitos não-lineares são considerados no sistema de colheita de
energia. Considera-se uma não-linearidade do tipo Duffing que pode ser monoestável ou
biestável no sistema mecânico. Uma relação constitutiva não-linear é considerada para
descrever o comportamento do material piezoelétrico. Simulações numéricas estabelecem
uma relação entre a energia gerada e seu rendimento, destacando a influência de aspectos
não-lineares. Comportamentos periódicos e caóticos são investigados. Pretende-se estabelecer
quais as melhores condições dinâmicas para melhorar o desempenho do sistema de colheita
de energia.
vi
Abstract of Thesis presented to COPPE/UFRJ as a partial fulfillment of the requirements for
the degree of Doctor of Science (D.Sc.)
ANALYSIS ON THE INFLUENCE OF NONLINEAR EFFECTS ON VIBRATIONBASED ENERGY HARVESTING USING PIEZOELECTRIC MATERIALS
Ana Carolina Souza Cellular
July/2016
Advisor: Marcelo Amorim Savi
Department: Mechanical Engineering
Energy harvesting is the process by which uses the energy available in the
environment for a particular purpose. One way that is gaining importance in recent years is
the use of vibration energy using piezoelectric materials to the electro-mechanical coupling.
This work investigates the influence of nonlinear effects in vibration-based energy
harvesting. An archetype model is used considering a mechanical system with one degree of
freedom connected to a circuit by piezoelectric element. Nonlinear effects are considered in
the energy harvesting system. It is considered a non-linearity of Duffing type that can be
monostable or bistable in the mechanical systems and other in the piezoelectric coupling.
With respect to piezoelectric material variations linear and non-linear coupling are compared.
Numerical simulations establish a relationship between the energy generated and their
performance, highlighting the influence of non-linear aspects. Periodic and chaotic behaviors
are investigated. Intends to establish the best conditions for improving the dynamic
performance of the energy harvesting system.
vii
SUMÁRIO
LISTA DE FIGURAS ............................................................................................................... IX
LISTA DE SÍMBOLOS ............................................................................................................ IX
1
INTRODUÇÃO ......................................................................................................... 1
1.1
ORGANIZAÇÃO DO TRABALHO ........................................................................... 9
2
MATERIAIS PIEZOELÉTRICOS ....................................................................... 10
2.1
ATUADORES .............................................................................................................. 19
2.2
SENSORES................................................................................................................... 24
2.3
COLHEITA DE ENERGIA .......................................................................................... 26
3
DISPOSITIVO DE COLHEITA DE ENERGIA .................................................... 32
3.1
EQUAÇÃO DE MOVIMENTO ADIMENSIONAL .................................................. 36
4
SIMULAÇÕES NUMÉRICAS ................................................................................ 42
4.1
INFLUÊNCIA DA FREQUÊNCIA DE FORÇAMENTO .......................................... 43
4.2
INFLUÊNCIA DA AMPLITUDE DE FORÇAMENTO ............................................ 51
5
CONCLUSÕES .......................................................................................................... 63
6
TRABALHOS FUTUROS ......................................................................................... 65
7
REFERÊNCIAS BIBLIOGRÁFICAS ...................................................................... 66
viii
LISTA DE FIGURAS
FIGURA 2.1 - ORIENTAÇÃO DOS DOMÍNIOS DURANTE A REALIZAÇÃO DA
POLARIZAÇÃO.......................................................................................................................... 12
FIGURA 2.2 - CICLO DE HISTERESE.. ........................................................................................... 13
FIGURA 2.3 – CICLO DE HISTERESE. ........................................................................................... 14
FIGURA 2.4 – EFEITO DIRETO E INDIRETO DE UM MATERIAL PIEZOELÉTRICO. ............ 15
FIGURA 2.5 – EIXOS DE REFERÊNCIA. ........................................................................................ 16
FIGURA 2.6 – MODOS DE OPERAÇÃO DO SENSOR PIEZOELÉTRICO. .................................. 17
FIGURA 2.7 – VIGA 1-D FINA. ........................................................................................................ 18
FIGURA 2.8 – BARRA 1-D. ............................................................................................................... 19
FIGURA 2.9 – REPRESENTAÇÃO DO COMPORTAMENTO DE TENSÃO-DEFORMAÇÃO
PARA UM MATERIAL ELÁSTICO .......................................................................................... 20
FIGURA 2.10 – APLICAÇÕES AUTOMOTIVAS E ATUADORES PIEZOELÉTRICOS. ............. 21
FIGURA 2.11 – IMPRESSORA A JATO DE TINTA COM MATERIAL PIEZOELÉTRICO.. ....... 22
FIGURA 2.12 – UNIDADE DE DISCO CONVENCIONAL E O CONJUNTO E-BLOCK COM
SUSPENSÃO DE CIRCUITO PIEZO DE INTERFACE. .......................................................... 23
FIGURA 2.13 – PROCESSO DE DEFORMAÇÃO DO ÓVULO DURANTE A INJEÇÃO
INTRACITOPLASMÁTICA. ...................................................................................................... 24
FIGURA 2.14 – TRANSDUTOR ULTRASSÔNICO PIEZOELÉTRICO. ........................................ 25
FIGURA 2.15 – SENSORES PIEZOELÉTRICOS ACOPLADO AO TRILHO PARA DETECÇÃO
DE DESGASTE DA RODA. ....................................................................................................... 26
FIGURA 2.16 – COLHEITA DE ENERGIA BIOMECÂNICA. ........................................................ 27
FIGURA 2.17 – PROTÓTIPO DE UMA PALMILHA PIEZOELÉTRICA ....................................... 28
FIGURA 2.18 – COLHEITA DE ENERGIA ATRAVÉS DE UMA MOCHILA. ............................. 28
FIGURE 2.19 - (A) ESTAÇÃO DE TÓQUIO E (B) BOATE “SUSTAINABLE DANCE CLUB” .. 29
FIGURA 2.20 - AVIÃO ADAPTADO COM SENSORES PIEZOELÉTRICOS. .............................. 29
FIGURA 2.21 - TURBINA EÓLICA PIEZOELÉTRICA DA AMERICAN WINDMILLS .............. 30
FIGURA 2.22 - NANOFITAS DE PZT ACOPLADAS COM SILICONE ....................................... 31
FIGURA 3.1 - EQUIPAMENTO EXPERIMENTAL DE COLHEITA DE ENERGIA. .................... 32
FIGURA 3.2 - MODELO ARQUÉTIPO DO SISTEMA DE COLHEITA DE ENERGIA BASEADA
EM VIBRAÇÃO. ......................................................................................................................... 33
FIGURA 3.3 - COLHEITA DE ENERGIA PIEZOELÉTRICA . ....................................................... 34
FIGURA 3.4 - CIRCUITO ACOPLADO AO ELEMENTO PIEZOELÉTRICO . ............................. 34
FIGURA 3.5 - ESQUEMA DA COLHEITA DE ENERGIA PIEZO-MAGNETO-ELÁSTICA ...... 39
ix
FIGURA 3.6 - SISTEMA TIPO DUFFING: ENERGIA POTENCIAL E A FORÇA
CORRESPONDENTE PARA DIFERENTES VALORES 𝛼 E 𝛽. .............................................. 40
FIGURA 3.7 - SISTEMA TIPO DUFFING: ENERGIA POTENCIAL E A FORÇA
CORRESPONDENTE PARA DIFERENTES VALORES 𝛼 E 𝛽 ............................................... 41
FIGURA 4.1 - MAPA DE POINCARE PARA UM CAMPO VETORIAL ....................................... 43
FIGURA 4.2 - EFICIÊNCIA VERSUS FREQUÊNCIA DE FORÇAMENTO PARA DIFERENTES
PROPRIEDADES MECÂNICAS COM ACOPLAMENTO PIEZOELÉTRICO LINEAR . ..... 45
FIGURA 4.3 - SALTOS DINÂMICOS DE SISTEMAS MONOESTAVEL E BIESTAVEL ........... 45
FIGURA 4.4 - ENERGIA DE ENTRADA E SAÍDA PARA DIFERENTES PARÂMETROS
MECÂNICOS (MONOESTÁVEL) ............................................................................................. 46
FIGURA 4.5 - ENERGIA DE ENTRADA E SAÍDA PARA DIFERENTES PARÂMETROS
MECÂNICOS (BIESTÁVEL) ..................................................................................................... 47
FIGURA 4.6 – EFICIÊNCIA-FREQUÊNCIA DE FORÇAMENTO PARA DIFERENTES
PROPRIEDADES MECÂNICAS E ACOPLAMENTO. ............................................................ 48
FIGURA 4.7
–
EFICIÊNCIA-FREQUÊNCIA
DE FORÇAMENTO COMPARANDO
O
ACOPLAMENTO LINEAR E NÃO LINEAR PARA OS SISTEMAS MONOESTÁVEL E
BIESTÁVEL. ............................................................................................................................... 49
FIGURA 4.8 - ENERGIA DE ENTRADA E SAÍDA COMPARANDO ACOPLAMENTO LINEAR
E NÃO LINEAR PARA OS SISTEMAS MONOESTÁVEIS E BIESTÁVEIS. ....................... 49
FIGURA 4.9 – EFICIÊNCIA-FREQUÊNCIA DE FORÇAMENTO PARA O SISTEMA
MONOESTÁVEL E DIFERENTES VALORES DE ACOPLAMENTO PIEZOELÉTRICO
NÃO LINEAR. ............................................................................................................................ 50
FIGURA 4.10 – EFICIÊNCIA-FREQUÊNCIA DE FORÇAMENTO PARA O SISTEMA
BIESTÁVEL E DIFERENTES VALORES DE ACOPLAMENTO PIEZOELÉTRICO NÃO
LINEAR.. ..................................................................................................................................... 51
FIGURA 4.11 - POTÊNCIA E POTÊNCIA MÉDIA CONSIDERANDO DIFERENTES VALORES
DA AMPLITUDE DE FORÇAMENTO PARA O SISTEMA MONOESTÁVEL E
ACOPLAMENTO PIEZOELÉTRICO LINEAR USANDO A MESMA CONDIÇÃO INICIAL
PARA CADA PARÂMETRO ..................................................................................................... 53
FIGURA 4.12 - POTÊNCIA E POTÊNCIA MÉDIA CONSIDERANDO DIFERENTES VALORES
DA AMPLITUDE DE FORÇAMENTO PARA O SISTEMA MONOESTÁVEL E
ACOPLAMENTO PIEZOELÉTRICO LINEAR USANDO DIFERENTES CONDIÇÕES
INICIAIS PARA CADA PARÂMETRO .................................................................................... 53
FIGURA 4.13 - COMPARAÇÃO DA EFICIÊNCIA EM FUNÇÃO DA AMPLITUDE DE
FORÇAMENTO
PARA
UM
SISTEMA
MONOESTÁVEL
E
ACOPLAMENTO
PIEZOELÉTRICO LINEAR USANDO DIFERENTES CONDIÇÕES INICIAIS PARA CADA
x
PARÂMETRO (LINHA VERMELHA) E AS MESMAS CONDIÇÕES INICIAIS PARA
CADA PARÂMETRO (LINHA PRETA) ................................................................................... 54
FIGURA 4.14 - EFICIÊNCIA VERSUS AMPLITUDE DE FORÇAMENTO PARA O SISTEMA
MONOESTÁVEL COM ACOPLAMENTO PIEZOELÉTRICO LINEAR E NÃO LINEAR .. 55
FIGURA 4.15 - POTÊNCIA E POTÊNCIA MÉDIA CONSIDERANDO DIFERENTES VALORES
DE
AMPLITUDE
DE
FORÇAMENTO
PARA
UM
SISTEMA
BIESTÁVEL
E
ACOPLAMENTO PIEZOELÉTRICO LINEAR USANDO AS MESMAS CONDIÇÕES
INICIAIS PARA CADA PARÂMETRO. ................................................................................... 56
FIGURA 4.16 - POTÊNCIA E POTÊNCIA MÉDIA CONSIDERANDO DIFERENTES VALORES
DE
AMPLITUDE
DE
FORÇAMENTO
PARA
UM
SISTEMA
BIESTÁVEL
E
ACOPLAMENTO PIEZOELÉTRICO LINEAR USANDO DIFERENTES CONDIÇÕES
INICIAIS PARA CADA PARÂMETRO .................................................................................... 57
FIGURA 4.17 - EFICIÊNCIA VERSUS AMPLITUDE DE FORÇAMENTO PARA UM
SISTEMA BIESTÁVEL COM ACOPLAMENTO PIEZOELÉTRICO LINEAR
USANDO DIFERENTES CONDIÇÕES INICIAIS PARA CADA PARÂMETRO
(LINHA VERMELHA) E MESMAS CONDIÇÕES INICIAIS PARA CADA
PARÂMETRO (LINHA PRETA)........................................................................................... 58
FIGURA 4.18 - DETALHES DA DINÂMICA DO SISTEMA BIESTÁVEL (𝛼= –1,2; 𝛽= 0,3;
𝜔
̅ = 1,5; 𝜉1 = 𝜉2 = 0) ................................................................................................................. 58
FIGURA 4.19 - EFICIÊNCIA PARA O SISTEMA BIESTÁVEL (𝛽 = −1,2, 𝛼 = 0,3) COM
VALORES DIFERENTES DA FREQUÊNCIA DE FORÇAMENTO CONSIDERANDO
ACOPLAMENTOS PIEZOÉLETRICOS LINEAR (𝜉1 = 𝜉2 = 0) E NÃO LINEAR (𝜉1 ≠ 0 E
𝜉2 ≠ 0) ......................................................................................................................................... 59
FIGURA 4.20 - DETALHES DA DINÂMICA DO SISTEMA BIESTÁVEL (𝛼 = –1,2; 𝛽 = 0,3; 𝜉1 =
𝜉2 = 0) PARA DIFERENTES VALORES DA FREQUÊNCIA DE FORÇAMENTO, 𝜔
̅ =1,0;
1,5 E 2,0 ....................................................................................................................................... 60
FIGURA 4.21 - COMPARAÇÃO ENTRE DIFERENTES RESPOSTAS COM EFICIÊNCIA
SIMILAR PARA UM SISTEMA BIESTÁVEL COM ACOPLAMENTO PIEZOELÉTRICO
LINEAR (𝛼 = –1,2; 𝛽 = 0,3; 𝜉1 = 𝜉2 = 0; 𝜔
̅ =1,5). ................................................................... 61
FIGURA 4.22 - COMPARAÇÃO ENTRE DIFERENTES RESPOSTAS COM EFICIÊNCIA
SIMILAR PARA UM SISTEMA BIESTÁVEL COM ACOPLAMENTO PIEZOELÉTRICO
LINEAR (𝛼 = –1,2; 𝛽 = 0,3; 𝜉1 = 𝜉2 = 0; 𝜔
̅ =1,5) .................................................................... 62
FIGURA 4.23 - COMPARAÇÃO ENTRE DIFERENTES RESPOSTAS COM EFICIÊNCIA
SIMILAR PARA UM SISTEMA BIESTÁVEL COM ACOPLAMENTO PIEZOELÉTRICO
LINEAR (𝛼 = –1,2; 𝛽 = 0,3; 𝜉1 = 𝜉2 = 0; 𝜔
̅ =1,5) .................................................................... 62
xi
LISTA DE SÍMBOLOS
b – Amortecimento viscoso linear
C – Capacitância
D - Deslocamento elétrico
DI – Deslocamento elétrico vetorial
dijk – Constante piezoelétrica vetorial
𝑑̅𝑖𝑗𝑘 – Constante piezoelétrica vetorial
E – Campo elétrico aplicado
EC - Campo coercitivo
Ek – Campo elétrico vetorial
ℱ(𝑧) – Força de restituição
𝑓(𝑥) – Força de restituição Adimensional
𝑖 – Corrente elétrica
l – Comprimento de referência
m – Massa
𝑚𝑢̈ – Excitação de base
𝑃 – Potência instantânea
𝑃𝑎𝑣𝑔 – Potência média
Pin – Potência mecânica de entrada
Pout – Potência elétrica de saída
PR – Polarização Remanescente
xii
PS – Polarização espontânea
PSAT – Polarização de saturação
PZT –Titanato zirconato de chumbo
𝑄 – Carga elétrica
RC – Circuito resistor-capacitor
Rl – Resistência
SHM – Structural Health Monitoring
S – Deformação
Sij – Deformação vetorial
𝑠𝑖𝑗𝑘𝑙 – Constante elástica vetorial
𝑇 – Período
Tij – Tensão vetorial
u = u(t) – Excitação de base
U(x) – Função potencial
𝑣 – Tensão Adimensional
V – Tensão gerada
𝑉̂ – Voltagem de referência
𝑥 – Deslocamento Adimensional
y – descolamento
Y – Módulo de Young
z - Descolamento relativo da base
𝛼, 𝛽 – Parâmetro da força de restituição adimensional
̂, 𝛽̂ – Parâmetro da força de restituição
α
𝛾 – Amplitude de forçamento
xiii
𝜖 – Força motriz do circuito
𝜀𝑖𝑗 – Constante dielétrica vetorial
𝜁 – Parâmetro de amortecimento
𝜃 – Parâmetro do acoplamento piezoelétrico
̂ – Coeficiente de acoplamento
Θ
𝜈 – Coeficiente de poisson
𝜂 – Eficiência
𝜉1 – Parâmetro do acoplamento piezoelétrico
𝜉2 – Parâmetro do acoplamento piezoelétrico
𝜌 – Resistividade elétrica
𝜏 – Tempo adimensionalizado
𝜔0 - Frequência fundamental
𝜔
̅ – Frequência de Forçamento
𝜙 – Acoplamento piezoelétrico Adimensional
( )T – Tensão contínua
( )E – Campo contínuo
xiv
1 INTRODUÇÃO
A energia é um aspecto essencial no mundo contemporâneo tendo relação com
quase todas as atividades humanas, incluindo transporte, aquecimento/refrigeração e
processos industriais. Com isso o processo de degradação ambiental aumenta em fatores
exponenciais para gerar toda essa energia. Nesse sentido, o desenvolvimento sustentável
passa a ser uma questão essencial para a sociedade. E devemos contar cada vez mais
com pesquisas que promovam inovações nesse setor para tentar minimizar os danos
causados ao meio ambiente. Fontes alternativas de energia constituem um dos maiores
desafios para assegurar a sustentabilidade das gerações futuras.
O crescimento do uso de dispositivos móveis traz a necessidade de se
desenvolverem fontes móveis de energia. As baterias permitem o armazenamento e a
mobilidade da energia, mas a necessidade crescente de carga deixam esses dispositivos
a mercê de uma tomada. A idéia de colheita de energia tem como principal objetivo
abastecer esses aparelhos eletrônicos móveis a qualquer hora em qualquer lugar sem a
necessidade de queima de combustíveis fósseis para geração de energia. Esse conceito
consiste em capturar a energia disponível no ambiente e convertê-la em energia elétrica.
Essa energia pode ser armazenada ou consumida de forma direta, constituindo uma
fonte renovável e limpa.
Os tipos mais comuns utilizados para colheita de energia são fotônicos, térmicos
e vibracionais (Adnan Harb, 2011):
1. Fotônicos: a energia solar é convertida em energia elétrica pelos fotovoltaicos
que geralmente são feitos por semicondutores. Podem ser células ou painéis
solares. Uma pequena célula solar, de baixo custo, pode gerar 150 watts de
1
energia ao meio-dia. A desvantagem de colheita fotônica é que a luz solar não
está disponível o dia inteiro, o que afeta a quantidade de tensão gerada. A
energia armazenada é afetada pelo declínio da luz ao mudar o ângulo de
incidência que atinge o dispositivo. Suscetível a poluentes como o pó, a luz pode
ser bloqueada nas células e dificultar ainda mais a sua eficiência. A fragilidade
dos dispositivos fotovoltaicos ainda é uma preocupação.
2. Térmicos: Dispositivos termoelétricos convertem atividades térmicas em energia
elétrica e são construídos a partir de semicondutores. Eles não necessitam de
geradores, bombas ou líquidos. Os principais requisitos para a operação são uma
fonte de calor e um dissipador de calor. Elementos termoelétricos produzem
energia DC (corrente contínua), um outro requisito é o de um conversor DC-DC
(conversor de corrente contínua em corrente alternada) para assegurar a
estabilidade do potencial produzido pela fonte de energia.
3. Vibracionais: Os dois métodos mais comuns para gerar energia são de indução
eletromagnética e piezoeletricidade. Indução eletromagnética é colhida por meio
de motores, com a diferença de que o imã no interior das bobinas se move para
trás e para frente em vez de apenas rodar. Materiais piezoelétricos podem gerar
tensão elétrica quando submetidos a um carregamento mecânico ou vice-versa,
quando submetidos a um campo elétrico se deformam. A abordagem do uso de
materiais piezoelétricos para produzir uma tensão elétrica consiste na ideia de
colheita
da
energia
disponível
no
“ambiente”,
permitindo
construir
equipamentos sem acumulação, de reduzido impacto ambiental, que se mantém
autônomos. Embora a escala da energia não seja significativa, pode ser
suficiente para dispositivos com tecnologias de baixo consumo.
2
A colheita de energia é limpa, pois não queima combustíveis fósseis e renovável
porque vem de recursos naturais que são naturalmente reabastecidos, como sol, vento,
chuva, marés, energia geotérmica e vibração sendo de interesse para a indústria em
geral, principalmente em locais remotos quando existe dificuldade da instalação de
cabos elétricos, como por exemplo, em condições encontradas em sistemas submarinos
ou poços de petróleo. Uma solução convencional utilizada pelas indústrias é o emprego
de baterias de lítio, mas as trocas periódicas são extremamente custosas.
Um sistema de colheita de energia inclui o mecanismo de captação, conversão
da energia e armazenamento através de circuitos eletrônicos. O objetivo desses circuitos
é transformar a potência gerada pelos sistemas de colheita em energia útil para
determinados sistemas alvo com o melhor desempenho possível.
Níveis de vibrações úteis para um acoplamento piezoelétrico são encontrados em
uma grande quantidade de aplicações que inclui o movimento do corpo humano;
aparelhos domésticos e de uso pessoal; movimentos de estruturas tipo automóveis,
aviões, prédios e pontes. A energia elétrica resultante do processo de colheita de energia
depende da quantidade de energia cinética do movimento (vibração) e do poder de
conversão elétrica. Em aplicações industriais, usualmente existe um nível alto de
vibrações harmônicas disponíveis e a conversão elétrica se torna viável e de fácil
transformação (Williams e Yates, 1996).
A energia cinética de prédios e pontes varia para diferentes cenários. Os prédios
apresentam uma resposta que depende de vento, vizinhança, ventilação, elevadores,
passagem de fluidos por dutos, atividades sísmicas, dentre outras. As pontes apresentam
vibrações que sofrem influência de tráfego de veículos, condições climáticas e a
magnitude das frequências dependem da natureza da estrutura. Williams et al. (2001) e
3
Kim et al. (2011) analisaram vários carregamentos sobre uma ponte e a colheita de
energia associada.
Fei et al. (2011) descreveram um sistema de colheita de energia eólica a baixa
velocidade e transformaram a energia de vibração aerodinamicamente induzida em
energia elétrica para alimentar pequenos circuitos. De Marqui et al. (2013) discutiram
colheita de energia em sistemas aeroelásticos combinando geração de energia com a
redução de vibrações indesejáveis. Abordagens experimentais e numéricas mostram
resultados interessantes em termos de colheita de energia, principalmente em relação a
energia coletada (De Marqui Jr e Erturk, 2013; Dias et al., 2013; Sousa et al., 2011).
As vibrações de sistemas micro-eletro-mecânicos (MEMS) também podem ser
exploradas para gerar energia (Lu et al., 2003; Fang, 2006; Shen et al., 2009; Harb,
2010). Nguyen (2013) investigou a colheita de energia usando MEMS. Os resultados
mostraram que a força de restituição não linear aumenta consideravelmente a colheita
de energia em relação à linear.
Na Holanda existe uma boate, “Sustainable Dance Club”, em que o piso é feito
de materiais piezoelétricos propiciando a geração de 10% da energia consumida pela
boate em dia de grande movimento (“Energy Floors”). A vibração referente ao
movimento humano é caracterizada em baixa frequência e altas amplitudes. Li et al
(2009) percebe que a angulação do impacto dos pés durante uma caminhada é
preponderante para colheita de energia.
O grande desafio para a colheita de energia a partir de vibrações é o
desenvolvimento de dispositivos que possam converter energia em uma ampla faixa de
frequência de excitação, adaptando-se a fontes disponíveis no ambiente. De uma
maneira geral, procura-se fazer com que os sistemas operarem na frequência de
ressonância por ser a região de maiores amplitudes e, consequentemente, por
4
apresentarem maior geração de energia (Inman, 2000). Todavia, variações na frequência
de excitação tendem a reduzir drasticamente a energia gerada. Nesse sentido, os
sistemas adaptativos permitem uma faixa de operação mais ampla.
Várias pesquisas têm sido realizadas visando melhorar o desempenho dos
sistemas de colheita de energia empregando diferentes modelos matemáticos (Ajitsaria
et al, 2007;. Du Toit et al, 2005; Lumentut et al, 2009) e testes experimentais (Erturk et
al, 2009; Du Toit et al., 2006) são empregados.
Liu et al. (2008) testaram modelos piezoelétricos variando a espessura da
película piezoelétrica e o tamanho da viga, para com isso melhorar a flexibilidade da
frequência e a potência de saída.
Sistemas não-lineares têm se mostrado interessantes no sentido de melhorar a
capacidade de colheita de energia de diferentes formas. Diferentes não-linearidades
devem ser destacadas: mecânica (Santon et al, 2009, Erturk e Inman, 2011; Leadenham
e Erturk, 2015), elétrica (Shun e Lien, 2006) e do acoplamento eletromecânico
piezoelétrico (Triplett e Quinn, 2009; Stanton et al, 2010; Silva et al, 2013; Silva et al,
2015).
Inman et al. (2009) investigaram os efeitos de vibrações aleatórias de banda
larga em um sistema de colheita de energia. Ertuk e Inman (2011) trataram variações
nas não-linearidades mecânicas do sistema comparando um sistema piezoelástico e um
piezo-magneto-elástico. O piezo-magneto-elástico apresenta um comportamento similar
ao oscilador do tipo Duffing.
A análise de sistemas de acoplamento eletromecânico também são investigados
com o intuito de melhorar o desempenho do sistema (Sodano e Inman, 2004; Erturk,
2009; Erturk e Inman, 2011).
5
Triplett e Quinn (2009) investigaram o acoplamento eletromecânico não-linear
de materiais piezoelétricos e também alguns aspectos relacionados com as nãolinearidades mecânicas na colheita de energia baseada em vibração. Silva et al. (2013)
investigaram a influência do comportamento histerético do material piezoelétrico na
colheita de energia baseada em vibração.
Ertuk e Inman (2011) apresentaram estudos teóricos e experimentais de órbitas
de alta energia na colheita de energia piezo-magneto-elástica em uma determinada faixa
de frequências de excitação. As equações contêm um oscilador tipo Duffing e um
acoplamento piezoelétrico. Verifica-se que a configuração piezo-magneto-elástica pode
gerar uma ordem de magnitude maior na potência em comparação com o equivalente
piezo-elástico em várias frequências. Respostas caóticas da configuração piezomagneto-elástico também são comparadas com a resposta periódica da configuração
piezo-elástica.
Stanton et al. (2009) validaram um modelo de colheita de energia não-linear
capaz de representar histereses usando uma viga piezoelétrica com magnetismo
permanente sobre a massa.
Stanton (2010) e Cottone (2009) propuseram um modelo para as respostas
piezoelétricas não-lineares de colheita de energia eletro-elástico utilizando uma
dependência quadrática do coeficiente de acoplamento piezoelétrico sobre a deformação
induzida. Testes experimentais são realizados mostrando uma boa concordância entre os
dados numéricos e experimentais.
Ramlan (2010) trata um oscilador de Duffing monoestável com efeitos de
endurecimento em um modelo arquétipo massa-mola-amotercedor com um grau de
liberdade. A análise mostra que a largura da banda de endurecimento depende da razão
de amortecimento, da não-linearidade e da aceleração na entrada. Esse estudo também
6
revela que a quantidade de energia colhida por um dispositivo não-linear é, no máximo,
4 / π maior do que de um dispositivo linear.
De Paula et al. (2015) investigaram os aspectos aleatórios na colheita de energia
à base de vibração de uma estrutura piezo-magneto-elástica. Uma comparação na
resposta entre sistemas lineares e não-lineares, monoestáveis e biestáveis, para vibração
aleatória são mostradas. Percebe-se uma melhoria na potência da colheita no sistema
biestável.
Silva et al. (2015) mostraram uma comparação entre dados experimentais e
diferentes modelos para o acoplamento piezoelétrico. Os resultados sugerem que a
inclusão de termos não-lineares nos modelos de colheita de energia podem ser usados
para reduzir as discrepâncias previstas por modelos lineares em relação aos dados
experimentais. Além disso, as não-linearidades podem induzir o aparecimento de saltos
dinâmicos que estão associados com mudanças dramáticas nas respostas do sistema.
Esforços de pesquisa também têm sido feitos para melhorar o sistema de
captação de energia usando circuitos elétricos com características não-lineares (Ottman
e Lesieutre, 2003; Lefeuvre, 2006). Shu Lien (2006) analisou a potência coletada em um
sistema de geração de energia com um dispositivo AC-DC piezoelétrico retificado.
Mostrou-se que a potência de saída depende das características da vibração de entrada
(frequência e aceleração), a massa do gerador, a carga elétrica, a frequência natural, o
coeficiente de amortecimento mecânico e o coeficiente de acoplamento eletromecânico
do sistema.
Recentemente, o uso sinergético de materiais inteligentes vem sendo
considerados para melhorar o desempenho de colheita de energia. Silva et al. (2015)
utilizaram ligas com memória de forma em conjunto com elementos piezoelétricos para
este objetivo. De Marqui et al. (2013) aplicaram a mesma ideia em problemas
7
aeroelásticos. Barbosa et al. (2015) desenvolveram uma análise considerando o uso da
colheita de energia para fins de controle, explorando ideias de controle de caos.
O presente trabalho analisa efeitos não-lineares na colheita de energia. Aspectos
mecânicos e eletromecânicos são explorados. Considera-se um modelo arquétipo para
um sistema de colheita de energia baseado em vibração, assumindo um sistema
mecânico acoplado a um circuito elétrico por meio de um elemento piezoelétrico.
A não-linearidade mecânica considera um oscilador tipo Duffing, podendo ser
monoestável
ou
biestável,
dependendo
dos
parâmetros.
A
não-linearidade
eletromecânica considera uma equação constitutiva quadrática do material piezoelétrico.
Essas não-linearidades são representativas de diferentes situações físicas.
Ao longo dos últimos anos, investigações indicam que as não-linearidades
podem ser utilizadas para melhorarem o desempenho do sistema de colheita de energia.
De uma maneira geral deve-se destacar a importância de promover uma coleta mais
eficaz sob fontes aleatórias e não estacionárias provenientes do ambiente. A literatura
tem apontado para o fato de que um dispositivo linear é mais sensível à perturbações
das excitações do ambiente ou à tolerâncias de fabricação (Daqaq et al., 2014), o que
mostra a relevância da consideração dos efeitos não-lineares.
Os efeitos não-lineares acarretam o surgimento de dinâmicas mais complexas,
associadas a multiestabilidades e respostas caóticas. Isso torna a análise mais
sofisticada, exigindo um arcabouço apropriado, o que é feito neste trabalho. O
desempenho do sistema é o foco principal deste trabalho, sendo monitorado a partir da
monitoração das potências de entrada e de saída.
8
1.1 ORGANIZAÇÃO DO TRABALHO
Este trabalho está dividido em cinco capítulos. No primeiro capítulo é feita uma
introdução onde consta uma revisão de literatura sobre os principais trabalhos em
colheita de energia baseada em vibração com materiais piezoelétricos.
O segundo capítulo apresenta uma descrição dos materiais piezoelétricos como
atuadores e sensores e suas principais aplicações. Dedica-se atenção especial ao
processo de colheita de energia a partir deste material.
O terceiro capítulo apresenta a modelagem do sistema de colheita de energia.
Inicialmente, consideram-se as equações constitutivas dos materiais piezoelétricos e, em
seguida, apresentam-se as equações de movimento do modelo arquétipo de colheita de
energia. Os métodos utilizados para a simulação numérica são discutidos na sequência.
No quarto capítulo são apresentadas as simulações numéricas contendo
diagramas de bifurcação, séries temporais e seções de Poincaré. O desempenho do
sistema de colheita de energia é monitorado avaliando a potência gerada e sua
eficiência.
Finalmente, o quinto capítulo apresenta as principais conclusões.
9
2 MATERIAIS PIEZOELÉTRICOS
Os materiais inteligentes podem ser classificados de acordo com os diferentes
tipos de acoplamento. Dentre os materiais inteligentes mais utilizados destacam-se:
ligas com memória de forma, materiais piezelétricos, materiais magnetoestrictivos e os
fluidos eletro e magneto-reológicos.
Materiais inteligentes são usualmente utilizados como sensores e atuadores em
estruturas inteligentes. A escolha do material adequado para cada aplicação depende de
muitos fatores e dois requisitos imprescindíveis no projeto devem ter destaque
(Lagoudas, 2008): a densidade de energia de atuação e a freqüência de atuação do
material.
A descoberta do efeito piezoelétrico pelo mineralogista francês Rene Just Hauy
em 1817, que observou a ocorrência natural do fenômeno em monocristais de quartzo,
possibilitou a grande descoberta dos irmãos Curie que ocorreu 1880. Os irmãos Jacques
e Pierre Curie descobriram que quando uma pressão era aplicada aos cristais de quartzo,
uma carga elétrica era gerada, chamada por “efeito piezo”. Nos anos subsequentes,
Gabriel Lippmann descobriu que a aplicação de um campo elétrico ao cristal produzia
uma deformação do material, definindo o efeito inverso. Tais experimentos, de efeito
direto e inverso, foram confirmados no início do século XX através de princípios
termodinâmicos por G. Lippman, W. G. Hankel, Lord Kelvin e W. Voigt.
A piezoeletricidade deve-se a ausência de um centro de simetria na célula
unitária que tem como consequência a distorção dessa célula, gerando dipolos elétricos.
No cristal de quartzo ocorre uma polarização espontânea, independente da aplicação de
campo elétrico. Materiais como esfarelita (ZnS contendo traços de Cd, Fe, e Mn),
10
turmalina, sal de Rochelle (NaKC4H406. 4H20), entre outros, também foram estudados
pelos irmãos Curie.
Voigt (1910) publicou a obra “Lerbuch der Kristallphysic” que se tornou a
referência na área detalhando o padrão do complexo eletromecânico relacionado aos
cristais piezoelétricos. Mais tarde, Langevin (1921) desenvolveu um transdutor
piezoelétrico de ultra-som durante a primeira guerra mundial. Logo depois, esses
materiais foram utilizados em submarinos, microfones, acelerômetros, dentre outros.
Na segunda guerra mundial, as pesquisas em materiais piezoelétricos se
expandiram nos EUA, na União Soviética e no Japão. A descoberta do titanato de bário
em 1940, e do titanato zirconato de chumbo (PZT) em 1950, definem uma nova geração
de materiais com alta rigidez dielétrica e propriedades piezoelétricas. Além disso, eles
ofereciam a possibilidade de adaptar o seu comportamento às respostas e aplicações
específicas através da utilização de dopantes.
Os dopantes podem ser adicionados aos PZTs para torná-los PZT “soft” ou PZT
“hard”. O PZT “hard” é obtido dopando íons aceptores de elétrons como, K+ ou Rb+ no
sítio A e Fe+3, Al+3 ou Mn+3 no sítio B, criando vacâncias de oxigênio na rede. Este tipo
de PZT tem baixa permissividade, pequena perda elétrica e baixo coeficiente
piezoelétrico. Os PZTs “hard” são difíceis de polarizar e despolarizar, sendo úteis para
aplicações drásticas. Por outro lado, PZTs “soft” são doadores de elétrons, como La3+
no sítio A e Nb5+ no sítio B, levando a criação de vacâncias no sítio A da estrutura.
Esses PZTs têm alta permissividade, grande perda elétrica, alto coeficiente piezoelétrico
e são fáceis de polarizar e despolarizar, sendo usados para aplicações que requerem
forte propriedade piezoelétrica (Moulson et al., 2003).
11
Dentre os vários tipos de materiais piezoelétricos, o PZT é o mais eficiente que
se conhece até hoje, sendo capaz de converter 80% da energia mecânica aplicada em
energia elétrica.
Os materiais piezoelétricos sintéticos são, em sua maioria, cerâmica ou
polímeros quando manufaturados, sendo constituídos por dipolos elétricos que estão
orientados de maneira aleatória. Quando submetidos a um campo elétrico externo
tendem a se orientarem. Utilizando um processo de polarização, parte dos dipolos se
mantém permanentemente alinhados e geram uma resposta ao campo elétrico. Esse
processo de polarização consiste em elevar a temperatura do material acima da
temperatura de Curie (temperatura na qual os dipolos podem mudar de orientação na
fase sólida) e aplicar um forte campo elétrico na direção em que se quer polarizar. O
material é então resfriado mantendo o campo elétrico. Desta forma, parte dos dipolos
são fixados permanentemente, orientados em uma única direção, o que favorece o
acoplamento eletromecânico, Figura 2.1. Essa direção é referenciada como a direção de
polarização do material.
(a)
(b)
(c)
Figura 2.1 - Orientação dos domínios durante a realização da polarização (GmbH e
KG, 2006). (a) polarização com orientação randômica, (b) polarização com o campo
elétrico, (c) polarização remanescente após o campo ser removido.
12
A Figura 2.2 relaciona o deslocamento elétrico com o campo elétrico. A
polarização do material aumenta, na proporção do campo (E) aplicado, e os dipolos vão
se alinhando em uma direção positiva (OB). Em altos níveis de campo elétrico, a
polarização atinge uma saturação, Ps. A polarização não cai a zero pois quando E é
retirado na posição zero do campo externo, alguns dos domínios permanecem alinhados
na direção positiva, consequentemente o cristal exibe uma polarização remanescente,
Pr. O cristal não pode ser completamente despolarizado até que um campo de
magnitude (OF) seja aplicado na direção negativa. O campo externo necessário para
reduzir a polarização a zero é chamado de Campo Coercitivo (EC). Se o campo aumenta
a um valor mais negativo, a direção da polarização dá um salto, onde o ciclo de
histerese é obtido. O valor da polarização espontânea PS (OE) é obtido pela
extrapolação da curva sobre o eixo de polarização (CE).
Figura 2.2 - Ciclo de histerese. Relação entre o deslocamento elétrico (D) e o campo
elétrico (E).
Fonte: Santos (2005).
Para altos valores de campo elétrico, o deslocamento elétrico D e a polarização P
são funções não-lineares do campo elétrico. O deslocamento elétrico na verdade não
13
representa nenhuma grandeza física. Ele apenas é obtido pela combinação do campo
elétrico com a polarização elétrica, 𝐷 = 𝜖0 𝐸 + 𝑃 de um material dielétrico.
A relação do deslocamento e do campo aplicado está mostrado na Figura 2.3,
apresentando uma forma de borboleta relacionada a um comportamento histerético.
Essa histerese é causada pelo processo de dissipação devido a eventos de deslizamento
no corpo piezoelétrico. Silva et al. (2013) analisaram os efeitos da histerese no sistema
de colheita de energia com este tipo de não-linearidade.
S
E
Figura 2.3 – Ciclo de histerese piezoelétrica experimental em formato de borboleta.
Relação entre a deformação (S) e o campo elétrico (E).
Fonte: Jordan e Ounaies (2001).
Os PZTs cerâmicos (liga de zircônio titânio) possuem uma elevada constante
dielétrica resultante do seu processo de polarização e da sua elevada frequência de
ressonância. Após a polarização, o material piezoelétrico necessita da aplicação de uma
tensão mecânica para gerar dipolos elétricos.
A propriedade piezoelétrica pode ser direta - quando aplicada uma tensão
mecânica produz um campo elétrico; ou inversa - quando aplicado um campo elétrico
produz uma deformação mecânica. A Figura 2.4 (a) apresenta um material piezoelétrico
14
logo após a polarização, a (b) - (c) compressão e expansão respectivamente do material
dada uma tensão mecânica gerando deslocamento elétrico e (d) – (e) expansão e
compressão do material respectivamente por indução do um campo elétrico.
(a)
(b)
(c)
(d)
(e)
Figura 2.4 –Efeito direto e indireto de um material piezoelétrico (GmbH e KG, 2006).
As equações constitutivas de um material piezoelétrico estabelecem uma relação
entre as variáveis mecânicas e elétricas. Para isso, devem-se levar em conta as
mudanças de tensão e deslocamento elétrico em três direções ortogonais causadas por
efeitos de acoplamento cruzado devido às tensões elétricas e mecânicas aplicadas.
Piezocerâmicas polarizadas são transversalmente isotrópicas e o plano de isotropia
é definido como plano 12 (xy). Materiais piezoéletricos exibem simetria no eixo 3 (z),
que é o eixo polarizado. Considerando o tensor de tensão Tij, o tensor deformação Sij, o
tensor campo elétrico Ek e o tensor deslocamento elétrico Di, as equações constitutivas
são expressas por:
𝑇
𝐷𝑖 = 𝑑𝑖𝑗𝑘 𝑇𝑗𝑘 + 𝜀𝑖𝑗
𝐸𝑗
(2.1)
𝐸
𝑆𝑖𝑗 = 𝑠𝑖𝑗𝑘𝑙
𝑇𝑘𝑙 + 𝑑̅𝑖𝑗𝑘 𝐸𝑘
15
onde 𝑑𝑖𝑗𝑘 e 𝑑̅𝑖𝑗𝑘 são as constantes piezoelétricas. Os termos ( )T e ( )E denotam que a
constante dielétrica 𝜀𝑖𝑗 e a constante elástica 𝑠𝑖𝑗𝑘𝑙 são medidas em condições de tensão e
campo elétrico constantes, respectivamente.
Usando a notação de Voigt, 11=1, 22=2, 33=3, 23=4, 13=5 e 12=6 os vetores de
tensão e deformação são escritos como se segue:
𝑆1
𝑆11
𝑆2
𝑆22
𝑆3
𝑆
= 33
𝑆4
2𝑆23
𝑆5
2𝑆13
[𝑆6 ] [2𝑆12 ]
𝑇1
𝑇11
𝑇2
𝑇22
𝑇3
𝑇
= 33
𝑇4
𝑇23
𝑇5
𝑇13
[𝑇6 ] [𝑇12 ]
e
(2.2)
A Figura 2.5 mostra um elemento infinitesimal com as direções utilizadas
usando a notação de Voigt.
Figura 2.5 – Eixos de referência.
Fonte: Jordan e Ounaies (2001)
𝐸
𝐸
As simetrias transversais do material isotrópico são 𝑠11
= 𝑠22
e 𝑑31 = 𝑑32 para um
material elástico, piezoelétrico com constantes dielétricas. Logo a forma expandida da
equação 2.1 é dada por:
16
𝐸 𝐸 𝐸
𝑠11
𝑠12 𝑠13 0 0 0 0 0 𝑑31 𝑇1
𝑆1
𝐸
𝐸 𝐸
𝑆2
𝑠12 𝑠11
𝑠13 0 0 0 0 0 𝑑31 𝑇2
𝐸 𝐸 𝐸 0 0 0 0 0 𝑑
𝑆3
𝑠13 𝑆13 𝑠33
33 𝑇3
𝐸
𝑆4
0 0 0 𝑠55 0 0 0 𝑑15 0 𝑇4
𝐸
𝑆5 = 0 0 0 0 𝑠66
0 𝑑15 0 0 𝑇5
𝐸
𝑇6
𝑆6
𝑠
0
0
0 0 0
11 0 0 0
𝑇
𝐷1
0 0 0 0 𝑑15 0 𝜀11 0 0 𝐸1
𝑇
𝐷2
0 0 0 𝑑15 0 0 0 𝜀11 0 𝐸2
𝑇
[𝐷3 ] [𝑑31 𝑑31 𝑑33 0 0 0 0 0 𝜀33
] [𝐸3 ]
𝑆1
1
𝑆2
−𝜈
𝑆3
1 −𝜈
=𝑌 0
𝑆4
0
𝑆5
[0
[𝑆6 ]
−𝜈
1
−𝜈
0
0
0
−𝜈
−𝜈
1
0
0
0
0
0
0
2(1 + 𝜈)
0
0
0
0
0
0
2(1 + 𝜈)
0
(2.3)
0
0
0
0
0
2(1 + 𝜈) ]
(2.4)
onde 𝑌 é o módulo de elasticidade e 𝜈 é a razão de Poisson.
Existem dois modos comuns de atuação piezoelétrica: o modo 33 e o modo 31,
Figura 2.6. No modo 33 a direção da tensão mecânica aplicada (força) e a tensão
elétrica gerada com a polarização do material são as mesmas. O modo 31 está associado
a uma tensão mecânica aplicada segundo um eixo perpendicular ao da polarização.
Figura 2.6 - Modos de operação do sensor piezoelétrico (Priya e Inman, 2009).
17
A Figura 2.7 mostra uma viga piezoelétrica fina onde a tensão-deformação
mecânica é aplicada na direção 1 e o campo elétrico é gerado na direção 3 (modo 31).
Neste modo podem-se assumir as seguintes condições abaixo:
h << a << b
Figura 2.7 – Viga 1-D fina.
𝑇2 = 𝑇3 = 𝑇4 = 𝑇5 = 𝑇6 = 0 e 𝐸1 = 𝐸2 = 0
E a equação constitutiva (2.1) é reduzida para a equação (2.5)
[
𝑆1
𝑠 𝐸 𝑑31 𝑇
] = [ 11 𝑇 ] [ 1 ]
𝐷3
𝑑31 𝜀33 𝐸3
(2.5)
A Figura 2.8 apresenta uma barra piezoelétrica alinhada ao eixo de polarização
na direção 3. A tensão-deformação mecânica é aplicada na direção 3 e o campo elétrico
segue neste mesmo eixo (modo 33). E as seguintes hipóteses sobre o estado de tensão e
campo elétrico dentro do material podem ser feitas:
18
h>>a h>>b
Figura 2.8 – Barra 1-D.
𝑇1 = 𝑇2 = 𝑇4 = 𝑇5 = 𝑇6 = 0 e 𝐸1 = 𝐸2 = 0
E a equação constitutiva (2.1) é reduzida para (2.6):
[
𝑆3
𝑠 𝐸 𝑑33 𝑇
] = [ 33 𝑇 ] [ 3 ]
𝐷3
𝑑33 𝜀33 𝐸3
(2.6)
As aplicações de transdutores eletromecânicos piezoelétricos são variadas. Esses
transdutores são encontrados em aplicações de forma ativa (atuador) ou passiva
(sensor). A seguir, discutem-se algumas dessas aplicações.
2.1 ATUADORES
Quando o material é mantido abaixo da temperatura de Curie e submetido a um
campo elétrico menor do que aquele utilizado no processo de polarização, os dipolos
respondem coletivamente, produzindo uma expansão macroscópica ao longo do eixo de
polarização e uma contração perpendicular a este. Isso confere capacidade de atuação ao
19
material (Moheimani, 2003). As aplicações mais comuns de atuadores piezoelétricos se
encontram na indústria automobilística, em computadores, na medicina, na indústria
militar e na gestão de energia.
Na indústria automobilística pode-se citar como atuadores, válvulas para sistemas
de injeção de combustível, dispositivos de posicionamento para faróis e espelhos.
Atuadores de níveis de combustível utilizam as duas propriedades piezoelétricas, direta
e inversa (Regelbrugge, 1997; Claeyssen et al., 2007; Belly et al., 2010).
Uma das principais vantagens de PZT é que as propriedades piezoelétricas físicas e
químicas podem ser otimizadas de acordo com as aplicações específicas, ajustando os
dopantes. Formulações de PZT “hard” são adequadas para aplicações de alta potência,
que envolvem níveis elevados de tensão elétrica e mecânica. Por outro lado,
formulações de PZT “soft” são adequadas para aplicações com alta sensibilidade e
permissividade (Leo, 2007). A curva de tensão mecânica – deformação após a
deformação elástica, relativa ao módulo de Young (Y), tem uma inclinação não linear
para cima no processo de endurecimento e para baixo no processo de amolecimento,
Figura 2.9.
Figura 2.9 – Representação do comportamento de tensão-deformação para um material
elástico (Leo, 2007).
20
Uma inovação automobilística é um sensor de nível de combustível, instalado na
parte inferior do interior do tanque. Uma corrente elétrica é enviada para o material PZT
esse se deforma em alta frequência produzindo uma oscilação em alta frequência. A
onda sonora resultante passa através do líquido e sobressalta para fora da superfície,
retornando para o transdutor, registrando o nível de combustível atual com base em um
"tempo de voo" de medição, Figura 2.10. A resistência do material à corrosão e a
estabilidade relativa à temperatura do material PZT asseguram uma operação confiável.
Figura 2.10 – Aplicações automotivas e atuadores piezoelétricos.
Fonte: Empresa Morgan Technical Ceramics
Os materiais piezoelétricos também são utilizados no setor de informática onde
destaca-se o uso em unidades de disco e impressoras de jato de tinta. As impressoras
possuem bocais através dos quais as tintas são injetadas a partir da aplicação de um
impulso de pressão. Esses materiais são configurados de modo que deformem uma das
paredes do canal levando a tinta a cada bocal. Os pulsos elétricos que energizam os
elementos piezoelétricos são na faixa de microssegundos, Figura 2.11.
21
Figura 2.11 – Impressora a jato de tinta com material piezoelétrico.
Fonte: Empresa Photocopier.
Com o aumento da quantidade de armazenamento em unidades de disco rígido,
torna-se cada vez mais necessária a precisão do posicionamento da cabeça da agulha de
leitura e escrita. O fluxo de ar gerado pelo processo de refrigeração do computador
causa atrito que excita modos de ressonância na suspensão fazendo com que a cabeça de
leitura balance para fora da sua posição neutra. A redução da vibração induzida pelo
fluxo de ar permite o aumento da velocidade de gravação da agulha no disco. O
dispositivo utiliza duas tiras de PZT ligadas à suspensão, uma como sensor e a outra
como um segundo atuador de fase (Sun et al., 2009). Desenhos esquemáticos de um
disco rígido e um conjunto de bloco de suspensão são mostrados na Figura 2.12.
22
Atuador
Figura 2.12 – Unidade de disco convencional e o conjunto E-block com suspensão de
circuito piezo de interface.
Fonte: Kon et al. (2006).
Em aplicações médicas os piezoelétricos vêm ganhando força com sistemas
artificiais de fertilização, micro-bomba médicas, micro-cirurgias e dispositivos de
controle de medicamentos. A “Micro Systems” (no Japão) e a “Micromechatronics, Inc”
(nos EUA) comercializaram um sistema de fertilização artificial micro robô, que
consiste de quatro eletromagnetos e quatro atuadores multicamadas. Micro ferramentas,
tais como pinças, tesouras e de perfuração estão disponíveis na base do robô para a
manipulação de nano-partículas e fibras.
Devido à elevada capacidade de resposta do atuador piezoelétrico em comparação
com os sistemas de pressão hidráulicas normais têm sido desenvolvidos sistemas
sofisticados de fertilização. A Figura 2.13 mostra a diferença de deformação do óvulo
durante o processo de inserção da agulha por um micro robô e para o sistema de pressão
à óleo convencional. A deformação pode ser minimizada por meio de um atuador
piezoelétrico que consegue produzir movimentos de alta-frequência (100Hz) da agulha.
23
Figura 2.13 – Processo de deformação do óvulo durante a injeção intracitoplasmática.
(a) sistema de pressão a óleo, (b) robô-piezoelétrico.
Fonte: Revista Medicaldevice (2006)
2.2
SENSORES
Um sensor piezoelétrico utiliza a propriedade do efeito direto (deformação
mecânica gerando corrente). Isso provoca o surgimento de uma distribuição de cargas
elétricas na superfície do material.
Sensores piezoelétricos aparecem na área médica como suporte para
monitoramento e ultra-som. No marca-passo o sensor monitora a atividade do paciente
(sensor de vibração), detectando um aumento do ritmo cardíaco e exigindo aumento do
fluxo sanguíneo. Ele também pode ser usado como transdutor de ultra-som para medir a
densidade óssea.
Na área militar, os piezoelétricos são utilizados em sondas de profundidade,
sistemas de orientação, hidrofones e sonares. Sonares permitem a detecção de objetos
no fundo do mar para identificar a sua posição. São usados em uma variedade de
embarcações, como navios de superfície, submarinos, torpedos e minas de caça. O sonar
24
ativo cria um pulso de som e em seguida, mede a reflexão. O impulso de som é
geralmente criado eletronicamente, utilizando um projetor sonar, que consiste de um
gerador de sinal, um amplificador de potência e um transdutor eletro-acústico (Figura
2.14). À distância a um objeto pode ser medida por determinação do tempo de
transmissão de um impulso para o tempo de recepção do eco (Fuchs, 2012).
Figura 2.14 – Transdutor ultrassônico piezoelétrico. Os dois piezoelétricos se encontram
entre as massas.
Fonte: Fuchs (2012).
Nuffer e Bein (2006) utilizam acelerômetros piezoelétricos como sensores de
detonação para motores de combustão, para a detecção de desgaste e para sensores de
proximidade em carros com o objetivo de evitar colisões durante o estacionamento.
Sensores piezoelétricos são utilizados para avaliar o desgaste da roda do trem
sobre os trilhos. A vibração da roda é analisada, levando a uma avaliação do seu estado
de desgaste. O método é proposto para a avaliação da rugosidade da roda (Figura 2.15).
25
Figura 2.15 – Sensores piezoelétricos acoplados ao trilho para detecção de desgaste da
roda.
A monitoração da integridade estrutural (SHM – do inglês, “structural health
monitoring”) é um dos tipos de aplicação mais importante relacionada com sensores
piezoelétricos. Diversos estudos estão considerando o uso de sensores e atuadores
piezoelétricos para identificação de danos em estruturas.
2.3
COLHEITA DE ENERGIA
Nos últimos anos tem crescido o interesse no conceito de colheita de energia
como parte da conscientização geral para fontes alternativas de energia. Algumas
formas de colheita de energia são baseadas em vibrações, fluxo de líquidos e gases,
movimento humano, ondas de choque, gradientes de temperatura, convertendo energia
mecânica em energia elétrica utilizável. A energia coletada pode ser armazenada e
utilizada em dispositivos de baixa potência, como frequentemente encontrados em
produtos eletrônicos portáteis e diversos sensores de monitoramento.
26
Aparelhos móveis exigem uma quantidade relativamente pequena de energia em
comparação com os equipamentos fixos, o que deixa sua alimentação ao alcance de
fontes de energia de baixa potência.
Existem muitas oportunidades de converter vibrações em energia elétrica
utilizando materiais piezoelétricos. O uso de mecanismos com elementos piezoelétricos
acoplados ao corpo humano para transformar energia cinética em elétrica vêm sendo
aplicados e testados em larga escala, como em mochilas e sapatos. Além disso, podemse aplicar esses elementos piezoelétricos em estradas e lugares de muito movimento
para coletarem energia do tráfego de veículos e pessoas e transformar em energia
elétrica útil.
Li et al. (2009) analisaram uma proposta nesse sentido. O mecanismo é
acoplado à perna do usuário. O sistema é bi-direcional e possui alta energia mecânica. A
proposta é uma embreagem unidirecional que transmite a vibração do joelho para o
mecanismo que o transforma em energia, Figura 2.16.
Figura 2.16 – Colheita de energia biomecânica.
Fonte: Li (2009)
A palmilha coletora é outro sistema para coletar energia da caminhada. Aplicada
ao tênis, ela converte a energia mecânica do peso do corpo ao caminhar ou em
atividades físicas em energia elétrica. O sistema de conversão consiste numa película
27
aplicada sobre uma palmilha fina que reveste o interior do calçado, armazenando a
energia num sistema de baterias ou sendo utilizada para carregar algum dispositivo
móvel, Figura 2.17.
Figura 2.17 – Protótipo de uma palmilha piezoelétrica (Mateu, 2006).
Feenstra et al. (2007) desenvolveram uma mochila que coleta energia a partir de
forças diferenciais entre o utilizador e o pacote, Figura 2.18.
Figura 2.18 – Colheita de energia através de uma mochila.
Fonte: Feenstra (2007).
28
Na estação de metro Marunouchi North em Tóquio foi instalado um “chão para
colheita de energia”. A energia coletada é utilizada nas catracas automáticas e telas
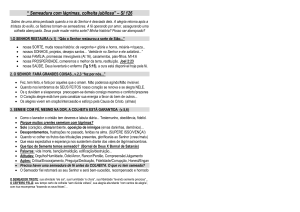
eletroluminescentes, Figura 2.19 (a). Nesta mesma linha a boate “Sustainable Dance
Club” utiliza elementos piezoelétricos na pista de dança, Figura 2.19 (b).
(a)
(b)
Figura 2.19 – (a) Estação de Tóquio e (b) boate “Sustainable Dance Club”.
Os materiais piezoelétricos possuem uma forte relação com a indústria
aeroespacial. Seu uso em aviões é importante tanto para gerar energia quanto para
reduzir vibrações críticas, Figura 2.20.
Figura 2.20 – Avião com sensores piezoelétricos. Fonte: Cenaero.
29
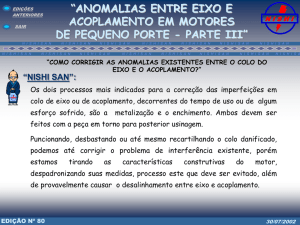
A Figura 2.21 mostra um protótipo de turbina eólica da American Windmills onde
o movimento das pás é utilizado para ativar uma manivela que deflete duas filas de 9
unidades piezoelétricas duplas, absorvendo assim a vibração das hélices. A manivela
resulta na vibração das células que podem fornecer energia a dispositivos que
funcionam numa gama de 10 a 50 mW. Logo utiliza-se as células piezoelétricas para
diminuir a vibração das pás no sistema e gerar energia.
Figura 2.21 – Turbina eólica piezoelétrica da American Windmills (Priya e Inman,
2009)
Outra aplicação diz respeito as nanofitas de cerâmica PZT incorporadas em folhas
de borracha de silicone. Utilizando o conceito de sensor e colheita de energia, as folhas
flexíveis podem ser utilizadas na fabricação de acessórios, roupas e sapatos,
aproveitando os movimentos naturais do corpo, como a respiração e o caminhar, para
alimentar
marcapassos,
telefones
celulares
e
outros
equipamentos
portáteis
(Universidade de Princeton, Qi et al.,2010).
Pesquisadores conseguiram combinar com sucesso as nanofitas de PZT com o
silicone, que é flexível, barato e biocompatível. Primeiro fabricaram as nanofitas de
30
PZT, tiras tão estreitas que 100 delas colocadas lado a lado cabem em um espaço de um
milímetro. Em um processo separado, eles incorporaram essas fitas em folhas de
borracha de silicone, criando o que eles chamaram de "chips de piezo-borracha" (Figura
2.22), que podem ser utilizados para alimentar marcapassos e celulares.
Figura 2.22 – Nanofitas de PZT acopladas com silicone.
Fonte: Universidade de Princeton (Qi et al., 2010)
31
3 DISPOSITIVO DE COLHEITA DE ENERGIA
A colheita de energia baseada em vibração pode estar associada a diversos sistemas
como asas de aviões, pisos, pontes e em tênis. Em laboratório, as análises são
usualmente realizadas em sistemas que combinam vigas piezoelétricas excitadas por um
shaker (Figura 3.1). Um circuito elétrico acoplado ao piezoelétrico deve ser considerado
no sistema a fim de medir a energia elétrica de saída. Imãs são utilizados para definir
diferentes não-linearidades no sistema. Note que a viga pode possuir um imã em sua
extremidade e a base pode conter outro ou outros. A polarização define se os imãs se
atraem ou se repelem, definindo sistemas com diferentes características.
Imãs
Figura 3.1 – Equipamento experimental de colheita de energia, De Paula et al.
(2015).
Baseado nesses sistemas de colheita de energia, um modelo arquétipo consiste de um
sistema mecânico conectado a um circuito elétrico por meio de um elemento
32
piezoelétrico (Figura 3.2). O sistema mecânico é um oscilador com massa m que
apresenta um deslocamento y; a excitação de base é representada por u=u(t) onde z
representa o descolamento relativo da base. Além disso, o oscilador tem um
amortecimento viscoso linear com coeficiente b e uma força de restituição ℱ(𝑧). O
acoplamento eletromecânico é provido por um elemento piezoelétrico com coeficiente
̂ . Esse elemento é conectado a um circuito representado por uma
de acoplamento Θ
resistência Rl , capacitância C e V é a voltagem no elemento piezoelétrico.
Massa
y(t)
Figura 3.2 – Modelo arquétipo do sistema de colheita de energia baseada em
vibração.
O elemento piezoelétrico pode ser representado por uma viga engastada em uma
das extremidades, Figura 3.3. Basicamente a viga piezoelétrica geradora tem uma única
camada piezoelétrica ligada a um substrato. A viga de PZT opera em modo de flexão. A
barra está sujeita a tensão / compressão e produz um campo elétrico.
O deslocamento elétrico é gerado segundo a espessura das células
piezoelétricas (direção 3), enquanto a tensão/deformação mecânica é segundo a direção
axial (direção 1), consequentemente, é usado o modo 3-1.
33
Figura 3.3 – Colheita de energia piezoelétrica (Silva et al.,2015).
Desta forma, a equação que governa o movimento do sistema mecânico é:
̂ 𝑉 = −𝑚𝑢̈
𝑚𝑧̈ + 𝑏𝑧̇ + ℱ(𝑧) − Θ
(3.1)
O circuito elétrico composto pelo elemento piezoelétrico e a resistência pode ser
representado por um circuito resistor-capacitor (RC) mostrado na Figura 3.4, onde 𝑅𝑙 é
a resistência do piezoelétrico somada com a do circuito, C a capacitância do piezo, 𝑉 é a
tensão elétrica gerada pelo piezoelétrico; 𝑖 é a corrente elétrica e 𝑄 é a carga elétrica.
Figura 3.4 – Circuito acoplado ao elemento piezoelétrico.
Assim, tem-se a seguinte equação para o circuito elétrico da Figura 3.2 que pode
ser representado pelo circuito equivalente mostrado na Figura 3.4.
34
𝑄
𝜖 = 𝑖𝑅𝑙 + 𝐶
(3.2)
̂
Θ
Tomando 𝜖 = 𝐶 𝑧 como força motriz do circuito.
̂
Θ
𝑄
− 𝐶 𝑧 = 𝑖𝑅𝑙 + 𝐶
(3.3)
Derivando a equação e aplicando 𝑉 = 𝑅𝑙 𝑖 e 𝑖 =
𝑑𝑄
𝑑𝑡
, tem-se:
̂
̂̇
𝑉
Θ
Θ
𝑉̇ + 𝐶𝑅 + 𝐶 𝑧̇ + 𝐶 𝑧 = 0
(3.4)
𝑙
Crawley e Anderson (1990) mostraram que o a dependência do tempo do
acoplamento piezoelétrico pode ser desprezada e, desta forma, Θ̇ = 0. Assim, as
equações de movimento do sistema de colheita de energia são as seguintes:
̂ 𝑉 = −𝑚𝑢̈
𝑚𝑧̈ + 𝑏𝑧̇ + ℱ(𝑧) − Θ
(3.5)
̂ 𝑧̇ + C𝑉̇ +
Θ
1
𝑉=0
𝑅𝑙
Então, para o problema estudado, considera-se uma força de restituição não-linear
mecânica do tipo Duffing:
ℱ(𝑧) = (𝛽̂ 𝑧 + 𝛼̂𝑧 3 )
(3.6)
35
onde α
̂ e β̂ caracteriza diferentes comportamentos.
O acoplamento piezoelétrico é descrito através da equação constitutiva nãolinear quadrática, que se segue, representativa de relações não-lineares de PZTs típicos:
̂ (𝑧) = 𝜇(1 + 𝛿1 |𝑧| + 𝛿2 𝑧 2 )
Θ
(3.7)
3.1 EQUAÇÃO DE MOVIMENTO ADIMENSIONAL
Neste momento, apresenta-se uma adimensionalização do modelo matemático
do sistema de colheita de energia. Para isso, considere novas coordenadas espaciais e
elétricas como, 𝑥 = 𝑧/𝑙 e 𝑣 = 𝑉/𝑉̂ onde l é um comprimento de referencia e 𝑉̂ é a
voltagem de referência. Além disso, considere a definição de uma frequência
fundamental 𝜔0 = √|𝛽̂ |⁄𝑚 e uma excitação harmônica −𝑚𝑢̈ = 𝐴 sen(𝜔𝑡). Usando
2𝜁 = 𝑏/𝑚𝜔0,
̂,
𝜖 = 𝑉̂ 2 𝐶 ⁄𝑚𝜔02 𝑙 2 , 𝜙 = (𝑙 ⁄𝐶𝑉̂ )Θ
𝜌 = 𝑅𝑙 𝐶𝜔0 ,
𝜔
̅ = 𝜔/𝜔0,
𝛽=
𝐴
𝛽̂ ⁄𝑚𝜔02 , 𝛼 = 𝛼̂𝑙 2 /𝑚𝜔02 , 𝜃 = (𝑙 ⁄𝐶𝑉̂ )𝜇, 𝜉1 = 𝑙𝛿1 , 𝜉2 = 𝑙 2 𝛿2 e 𝛾 = 𝑚𝜔2𝑙, a equação de
0
movimento pode ser reescrita como se segue:
𝑥 ′′ + 2𝜁𝑥 ′ + 𝑓(𝑥) − 𝜖𝜙𝑣 = 𝛾sen(𝜔
̅𝜏)
(3.8)
𝜙𝑥 ′ + 𝑣 ′ + 𝑣⁄𝜌 = 0
(3.9)
onde 𝜁 representa o parâmetro de dissipação, 𝜙𝜖 é o termo de acoplamento piezoelétrico
na equação mecânica, 𝜙 é o termo de acoplamento piezoelétrico na equação do circuito
36
elétrico, 𝑓(𝑥) é a força de restituição, 𝛾 é a amplitude de forçamento, 𝜔
̅ é a frequência
de forçamento, (∎′ ) ≡ 𝑑(∎)/𝑑𝜏 e 𝜏 = 𝜔0 𝑡 é o tempo adimensionalizado.
O potencial elétrico do sistema de colheita de energia pode ser avaliado
considerando a potência instantânea 𝑃 = 𝑣 2 ⁄𝜌, e a potência média, definida como
𝑇
1
𝑃𝑎𝑣𝑔 = 𝑇 ∫0 𝑃(𝑡)𝑑𝜏, onde 𝑇 = 2𝜋.
O desempenho do sistema pode ser avaliado estabelecendo uma comparação entre
potência de entrada, mecânica - Pin, e a potência de saída, elétrica - Pout. Com isso,
define-se a eficiência, 𝜂 = 𝑃𝑜𝑢𝑡 ⁄𝑃𝑖𝑛 . As definições das potências de entrada e saída são
apresentadas a seguir:
𝜏
1
𝑃𝑖𝑛 = √𝜏 ∫0 (𝑥′(𝛾sin(𝜔
̅𝜏)))2 𝑑𝜏
1
(3.10)
𝜏
𝑃𝑜𝑢𝑡 = √ 𝜏 ∫0 (𝑣 2 ⁄𝜌)2 𝑑𝜏
(3.11)
As não-linearidades do sistema mecânico podem ser consideradas a partir da
força de restituição. Uma primeira aproximação é considerar a força de restituição do
tipo Duffing que pode ser descrita pela a equação que se segue:
𝑓(𝑥) = 𝛽𝑥 + 𝛼𝑥 3
(3.12)
E sua energia potencial,
1
1
𝑈(𝑥) = 2 𝛽𝑥 2 + 4 𝛼𝑥 4
(3.13)
37
Para visualizar a relação entre o modelo arquétipo e o protótipo experimental,
considere o esquema da Figura 3.5. Um imã está acoplado à extremidade do PZT,
enquanto outros imãs estão fixados ao quadro de referência. Esses componentes
magnéticos introduzem não-linearidades no sistema.
Sob excitações de base, a ponta do imã oscila dentro do potencial do outro imã fixo
e a força de restituição torna-se uma função não-linear da deflexão da ponta, e da
configuração dos imãs. A magnitude e a natureza da não-linearidade pode ser alterada
através da concepção do sistema. O uso de dois imãs na base torna o sistema biestável,
possuindo valores negativos para β, com rigidez negativa na posição do centro. Caso
não se use imãs na base (ou alternativamente, o uso de apenas um imã atrativo) torna o
sistema monoestável, com valores positivos para β.
A variação dos parâmetros β e α está diretamente ligada a configuração e as
posições dos imãs da base. A Figura 3.5 ilustra três configurações possíveis, mostrando
as respectivas energia do sistema, diretamente relacionada a definição da força de
restituição. Em termos de pontos de equilíbrio, é possível observar pontos estável e de
sela, dependendo da atração ou repulsão dos imãs.
38
Figura 3.5 - Esquema da colheita de energia piezo-magneto-elástica.
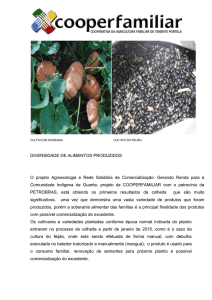
A força de restituição possui não-linearidade cúbica e pode ser observada na
Figura 3.6 (b). A energia potencial também é mostrada para diferentes valores de
parâmetros.
39
Figura 3.6- Sistema tipo Duffing: energia potencial e a força correspondente para
diferentes valores α e β.
No que diz respeito ao acoplamento eletromecânico, observações experimentais
apontam para dois aspectos importantes de não-linearidade do elemento piezoelétrico: o
coeficiente de acoplamento piezoelétrico e a histerese do material. Du Toit (2005)
discutiu os aspectos não-lineares relacionados com o comportamento constitutivo dos
materiais piezoelétricos. Mostrou-se que os valores das constantes piezoelétricas
apresentam uma dependência significativa em relação à deformação. Silva et al. (2013)
apresentaram uma discussão sobre os efeitos da histerese no acoplamento eletromecânico. Silva et al. (2015) estabeleceram uma comparação entre diferentes modelos
não-lineares e o modelo linear. A comparação com resultados experimentais mostraram
que um modelo quadrático proporciona uma boa descrição do acoplamento eletromecânico. Desta forma, adota-se o seguinte acoplamento piezoelétrico não-linear
adimensional:
𝜙 = 𝜃(1 + 𝜉1 |𝑥| + 𝜉2 𝑥 2 )
(3.14)
40
A Figura 3.7 mostra um comportamento típico do coeficiente constitutivo do
material piezoelétrico.
Figura 3.7 – Comportamento eletromecânico em função da deformação induzida
adimensional.
No próximo capítulo apresentam-se simulações numéricas do modelo apresentado
neste capítulo.
41
4
SIMULAÇÕES NUMÉRICAS
Este capítulo apresenta simulações numéricas para explorar a dinâmica de colheita
de energia considerando diferentes não-linearidades e excitações. O método de RungeKutta de quarta ordem implementado em FORTRAN 9.0 é utilizado considerando
passos menores que 10-3, obtidos a partir de uma análise de convergência. O código foi
implementado pelo autor.
Inicialmente, apresenta-se uma avaliação do sistema com força de restituição tipo
Duffing para diferentes parâmetros de e considerando características monoestaveis
e biestáveis. Não-linearidades constitutivas do elemento piezoelétrico também são
investigadas comparando com um modelo constitutivo linear (𝜉1 = 𝜉2 = 0). O foco
central da análise é a potência gerada e a eficiência do sistema. Alguns parâmetros são
adotados em todas as simulações 𝜁 = 0,01, 𝜖 = 0,1, 𝜃 = 0,5, 1/𝜌 = 0,05 e 𝛾 = 0,1.
O diagrama de bifurcação é escolhido como uma forma de visualizar os aspectos
globais da dinâmica do sistema. O parâmetro de controle a ser considerado é a
amplitude de forçamento (γ). De posse das informações do diagrama de bifurcação,
diferentes comportamentos são investigados, avaliando o desempenho do sistema para
fazer a colheita de energia. O comportamento caótico é diagnosticado utilizando
expoentes de Lyapunov que avaliam a taxa de divergência local de trajetórias próximas,
quantificando a sensibilidade às condições iniciais. Quando o maior expoente é
negativo, órbitas próximas convergem; e quando é positivo, órbitas próximas divergem,
caracterizando o caos. O algoritimo clássico de Wolf et al (1985) é empregado para
estimar os expoentes de Lyapunov.
42
O espaço de fase relaciona variáveis de estado e permite a visualização da resposta
dinâmica. O mapa de Poincaré promove uma redução na dimensão do espaço de fase,
definindo uma superfície no espaço que é cruzada pela evolução da órbita, Figura 4.1.
Figura 4.1 - Mapa de Poincare para um campo vetorial.
4.1 INFLUÊNCIA DA FREQUÊNCIA DE FORÇAMENTO
Normalmente, as respostas mais desejáveis para fins de colheita de energia estão
relacionadas com grandes amplitudes. Portanto, as condições de ressonância são de
especial interesse. No entanto, não-linearidades estão associadas com respostas
complexas que podem mudar esta condição e, portanto, precisam ser devidamente
investigadas. Saltos dinâmicos e caos são algumas das características da dinâmica nãolinear que precisam ser tratadas a fim de avaliar o desempenho do sistema.
Inicialmente, a eficiência do sistema é avaliada alterando a frequência de
forçamento e adotando diferentes parâmetros mecânicos com um modelo constitutivo
linear (𝜉1 = 𝜉2 = 0). Os parâmetros não-lineares utilizados foram retirados dos dados
experimentais da De Paula et al. (2015). Os resultados apresentados aumentavam o
tamanho banda de frequência onde se capta maiores potências de colheita de energia e
geravam melhores valores em relação a força de restituição linear. Assim, para 𝛽 > 0
43
foram
𝛽 = 1,0, 𝛼 = 0,4; 𝛽 = 2,0, 𝛼 = 0,3 𝑒 𝛽 = 3,0, 𝛼 = 0,2
e para 𝛽 < 0 𝛽 =
−1,2, 𝛼 = 0,3; 𝛽 = −1,6, 𝛼 = 0,6 e 𝛽 = −2,0, 𝛼 = 1,0. Vale lembrar que a variação
dos valores desses parâmetros pode ser feita experimentalmente alterando a posição dos
imãs, conforme ilustrado na Figura 3.5.
A Figura 4.2 mostra a eficiência sob uma variação quasi-estática da frequência de
forçamento para diferentes características do sistema mecânico. A resposta é
caracterizada por uma curva com dois picos em que o segundo está relacionado com
saltos dinâmicos, que aponta para uma característica típica de ressonância não-linear,
por apresentar saltos dinâmicos. O primeiro pico está relacionado a valores de potência
de entrada e saída muito pequenos, como pode ser visto na Figura 4.4 e não tem
interesse significativo em termos de colheita de energia.
Em geral, o sistema monoestável (associado com positivo) tem melhor eficiência
do que o sistema biestável (associado com negativo). Note que a eficiência máxima
ocorre para diferentes frequências e essa conclusão é mais evidente para sistemas
biestáveis. Os detalhes deste tipo de comportamento são apresentados na Figura 4.3,
para um sistema monoestável e biestável, mostrando os saltos dinâmicos a partir da
diferença entre o aumento e diminuição da frequência. Deve-se observar que o sistema
monoestável pode atingir valores mais elevados de eficiência durante o aumento da
frequência. Por outro lado, no caso biestável, pode-se atingir valores mais elevados de
eficiência durante o teste de decréscimo da frequência.
44
Figura 4.2 - Eficiência-frequência de forçamento para diferentes propriedades
mecânicas com acoplamento piezoelétrico linear (𝜉1 = 𝜉2 = 0).
Figure 4.3 - Saltos dinâmicos de sistemas monoestável (𝛽 = 1,0, 𝛼 = 0,4 a esquerda) e
biestável (𝛽 = −1,2, 𝛼 = 0,3 a direita).
A Figura 4.4 e 4.5 apresenta uma comparação entre a energia de entrada e saída
dos sistemas monoestáveis e biestáveis. Note que o sistema monoestável tem uma
melhor eficiência do que o biestável para esses conjuntos de parâmetros. Entretanto,
sistemas biestáveis apresentam dois picos enquanto o monoestável tem apenas um.
45
Além disso, sistemas monoestáveis tem tendência ao endurecimento enquanto os
biestáveis possuem comportamento de amolecimento. Quando o salto dinâmico possui
uma inclinação para a direita tem característica de endurecimento e quando para a
esquerda de amolecimento. Para a condição de força de restituição linear não ocorre o
salto e o pico fica sob a condição de ressonância 𝜔0 .
Figura 4.4 - Energia de entrada e saída para diferentes parâmetros mecânicos
(monoestável). (a) 𝛽 = 1,0, 𝛼 = 0,4; (b) 𝛽 = 2,0, 𝛼 = 0,3; (c) 𝛽 = 3,0, 𝛼 = 0,2;
46
(a)
(b)
(c)
Figura 4.5 - Energia de entrada e saída para diferentes parâmetros mecânicos
(biestável). (a) 𝛽 = −1,2, 𝛼 = 0,3; (b) 𝛽 = −1,6, 𝛼 = 0,6 e (c) 𝛽 = −2,0, 𝛼 = 1,0.
O comportamento do sistema de colheita de energia assumindo acoplamento
piezoelétrico não-linear (𝜉1 = 0,5 and 𝜉2 = −0,1) é investigado a partir de agora.
Comparando resultados entre modelos constitutivos não-lineares (Figuras 4.2 e 4.6),
percebe-se que o acoplamento piezoelétrico não-linear aumenta a eficiência para todos
os casos analisados. Essas curvas indicam que os efeitos não-lineares têm uma
influência considerável nos resultados. Mais detalhes podem ser observados na Figura
4.7, onde os resultados dos sistemas monoestáveis e biestáveis são apresentados juntos,
comparando o efeito de acoplamentos piezoelétricos linear e não-linear. Nota-se que a
eficiência aumenta quando comparado com o modelo constitutivo linear, sendo uma
47
vantagem essencial para fins de colheita de energia. Além disso, o valor máximo tende a
mudar para frequências mais elevadas para os sistemas biestáveis (Figura 4.7b), mas
este efeito é apenas visível no sistema monoestável (Figura 4.7a). A Figura 4.8
apresenta uma comparação entre as potências de entrada e saída para os sistemas
monoestáveis e biestáveis comparando os efeitos de acoplamentos piezoelétrico linear e
não linear.
Figura 4.6 – Eficiência - frequência de forçamento para diferentes propriedades
mecânicas e acoplamento piezoelétrico não linear (𝜉1 = 0,5 e 𝜉2 = −0,1).
48
Figura 4.7 - Eficiência - frequência de forçamento comparando o acoplamento linear e
não linear para os sistemas (a) monoestável (𝛽 = 1,0, 𝛼 = 0,4) e (b) biestável (𝛽 =
−1,2, 𝛼 = 0,3).
Figura 4.8 - Energia de entrada e saída comparando acoplamento linear e não linear para
os sistemas monoestáveis (a) 𝛽 = 1,0, 𝛼 = 0,4, (b) 𝛽 = 2,0, 𝛼 = 0,3 e biestáveis
(c) 𝛽 = −1,2, 𝛼 = 0,3 e (d) 𝛽 = −1,6, 𝛼 = 0,6.
49
Diferentes valores de acoplamento piezoelétrico não-lineares são agora analisados
para o caso monoestável (β = 1,0, α = 0,4). A Figura 4.9 (a) mostra a eficiência em
função da frequência variando 𝜉2 e mantendo 𝜉1 constante e a Figura 4.9 (b) varia 𝜉1 e
mantém 𝜉2 constante. Aumentando o módulo de 𝜉2 , a eficiência é reduzida e o máximo
ocorre em uma frequência mais baixa (Figura 4.9 (a)). O aumento de 𝜉1 induz o
aumento da eficiência da mesma maneira (Figura 4.9 (b)). A Figura 4.8 mostra a mesma
análise para o sistema biestável (β = 1,2, α = 0,3). Como 𝜉2 aumenta em módulo, a
eficiência máxima inicialmente diminui e depois aumenta, mas quando 𝜉2 é igual a 0,5,
a eficiência quase desaparece (Figura 4.10 (a)). O mesmo comportamento foi
apresentado anteriormente quando aumentado o valor de 𝜉1 (Figura 4.10 (b)).
Figura 4.9 – Eficiência - frequência de forçamento para o sistema monoestável (𝛽 =
1,0, 𝛼 = 0,4) e diferentes valores de acoplamento piezoelétrico não linear. (a) variando
𝜉2 e (b) variando 𝜉1 .
50
Figura 4.10 – Eficiência- frequência de forçamento para o sistema biestável (𝛽 =
1,2, 𝛼 = 0,3) e diferentes valores de acoplamento piezoelétrico não linear. (a) variando
𝜉2 e (b) variando 𝜉1 .
4.2 INFLUÊNCIA DA AMPLITUDE DE FORÇAMENTO
Diferentes condições de excitação são agora investigadas para explorar a influência
da amplitude forçamento. Basicamente, considera-se a resposta do sistema sob uma
frequência constante, variando a amplitude forçamento. Inicialmente, os sistemas
monoestável (β = 1,0, α = 0,4) e biestável (β = -1,2, α = 0,3) são tratados considerando
acoplamento piezoelétrico linear (𝜉1 = 𝜉2 = 0) com 𝜔
̅ = 1,5, que é uma frequência
próxima das condições de ressonância.
As Figuras 4.11 e 4.12 apresentam diagramas de bifurcação do sistema
monoestável considerando a potência e a potência média para diferentes valores de
excitação variando a amplitude forçamento. Diferentes procedimentos são empregados
para construir os diagramas de bifurcação. A primeira, Figura 4.11, utiliza as mesmas
condições iniciais para todos os parâmetros. Por outro lado, o segundo procedimento
(Figura 4.12), adota a resposta do parâmetro anterior como condições iniciais. A
diferença sugere a existência de múltiplas soluções estáveis para o mesmo conjunto de
51
parâmetros. A dinâmica do sistema é apresentada por série temporal, espaço de fase e
Poincaré. Na série temporal mostra-se a potência instantânea e a potência média sobre o
tempo. No espaço de fase e Poincaré apresenta a potência sobre a deformação,
avaliando assim o período tratado.
Detalhes da dinâmica do sistema para um conjunto de parâmetros, mas com
diferentes condições iniciais, são representadas em ambas as figuras. Eles são
essencialmente diferentes, sendo associado com níveis distintos de colheita de energia.
Nota-se que para = 0,5, é possível obter uma potência máxima de 0,06219 para o
primeiro caso e 0,002282 para o segundo. Em termos de potência média as diferenças
vão de 0,02934 a 0,001138. Situação semelhante pode ser observada para = 4,23;
0,16862 a 0,118328 em termos de potência máxima; ou 0,05272 a 0,05254 em termos
de potência média.
A Figura 4.13 apresenta uma comparação entre a eficiência do sistema monoestável
para os casos anteriores. Note que a variação das condições iniciais pode estar
relacionada com diferentes níveis de eficiência, especialmente em regiões com saltos
dinâmicos.
52
Figura 4.11 – Potência e potência média considerando diferentes valores da amplitude
de forçamento para o sistema monoestável (𝛽 = 1,0, 𝛼 = 0,4) e acoplamento
piezoelétrico linear (𝜉1 = 𝜉2 = 0) usando a mesma condição inicial para cada
parâmetro.
Figura 4.12 - Potência e potência média considerando diferentes valores da amplitude
de forçamento para o sistema monoestável (𝛽 = 1,0, 𝛼 = 0,4) e acoplamento
piezoelétrico linear (𝜉1 = 𝜉2 = 0) usando diferentes condições iniciais para cada
parâmetro.
53
Figura 4.13 – Comparação da eficiência em função da amplitude de forçamento para
um sistema monoestável (𝛽 = 1,0, 𝛼 = 0,4) e acoplamento piezoelétrico linear
(𝜉1 = 𝜉2 = 0) usando diferentes condições iniciais para cada parâmetro (linha
vermelha) e as mesmas condições iniciais para cada parâmetro (linha preta).
A influência do acoplamento piezoelétrico é tratada a seguir. A resposta do sistema é
investigada assumindo um acoplamento piezoelétrico linear e não-linear usando
𝜔
̅ = 1,5, nas condições previstas no caso anterior. A Figura 4.14 apresenta a eficiência
no diagrama de bifurcação. Mais uma vez, o acoplamento não-linear piezoelétrico
aumenta a eficiência no sistema. Deve ser observada a baixa eficiência geral do sistema
para os parâmetros considerados e um salto dinâmico perto de 𝛾 = 1,0.
54
Figura 4.14 - Eficiência versus amplitude de forçamento para o sistema
monoestável (𝛽 = 1,0, 𝛼 = 0,4) com acoplamento piezoelétrico linear (𝜉1 = 𝜉2 = 0)
e não linear (𝜉1 ≠ 0 and 𝜉2 ≠ 0).
O sistema biestável (𝛽 = −1,2, 𝛼 = 0,3) é investigado considerando o
acoplamento piezoelétrico linear (𝜉1 = 𝜉2 = 0) com 𝜔
̅ = 1,5. A Figura 4.15 e 4.16
apresentam diagramas de bifurcação relativos à eficiência, considerando diferentes
procedimentos. A Figura 4.15 utiliza as mesmas condições iniciais para todos os
parâmetros; o segundo procedimento, Figura 4.16, adota a resposta do parâmetro
anterior como condição inicial. Mais uma vez, acontece a ocorrência de
multistabilidades relacionadas a soluções estáveis que podem ser observadas nas
diferenças entre os dois diagramas.
As regiões caóticas estão associadas com a nuvem de pontos e apresentam um
bom desempenho em termos de geração de energia e, portanto, são de especial
interesse. Os valores médios de potência são mais ou menos os mesmos, mas o valor
55
máximo de potência varia como se segue: 0,22073 ( = 0,74), 0,322638 ( = 1,944) e
0,502734 ( = 4,966) para o primeiro procedimento e 0,173352 ( = 0,74), 0,23520 (
= 1,944) e 0,281445 ( = 4,966) para o segundo. A nuvem de pontos que aparece
tanto no diagrama de bifurcação quanto no espaço de fase representa um sistema
caótico e pode ser comprovado pelo expoente de Lyapunov positivo gerado pelo
algoritmo de Wolf.
Figura 4.15 - Potência e potência média considerando diferentes valores de amplitude
de forçamento para um sistema biestável (𝛽 = −1,2, 𝛼 = 0,3) e acoplamento
piezoelétrico linear (𝜉1 = 𝜉2 = 0) usando as mesmas condições iniciais para cada
parâmetro.
56
Figura 4.16 – Potência e potência média considerando diferentes valores de amplitude
de forçamento para um Sistema biestável (𝛽 = −1,2, 𝛼 = 0,3) e acoplamento
piezoelétrico linear (𝜉1 = 𝜉2 = 0) usando diferentes condições iniciais para cada
parâmetro.
A Figura 4.17 estabelece uma comparação em termos da eficiência dos dois
casos mostrados nas figuras 4.15 e 4.16. Devido às soluções multiestáveis, o conjunto
de condições podem mudar drasticamente a dinâmica do sistema. A Figura 4.18
apresenta detalhes da dinâmica do sistema para um conjunto de parâmetros com
𝜔
̅ = 1,5 e diferentes tipos de soluções. Notam-se soluções periódicas que oscilam em
torno de um ponto de equilíbrio, em torno de três pontos de equilíbrio (cerca de dois
poços) e caos.
57
Figura 4.17 – Eficiência versus amplitude de forçamento para um sistema biestável
com acoplamento piezoelétrico linear usando diferentes condições iniciais para cada
parâmetro (linha vermelha) e mesmas condições iniciais para cada parâmetro (linha
preta).
Figura 4.18 – Detalhes da dinâmica do sistema biestável (β = –1,2; α = 0,3; 𝜔
̅ = 1,5;
𝜉1 = 𝜉2 = 0).
58
A Figura 4.19 apresenta diagramas de bifurcação relativos à eficiência
comparando os acoplamentos piezoelétricos linear (𝜉1 = 𝜉2 = 0) e não-linear
(𝜉1 ≠ 0 and 𝜉2 ≠ 0). Três valores diferentes da frequência de forçamento são
analisados (𝜔
̅ = 1,0; 1,5 e 2,0). Sob essas condições, é possível observar regiões
caóticas próximas aos saltos dinâmicos. Essas regiões estão associadas a uma boa
eficiência comparada com as outras.
Além disso, pode-se perceber que antes dos saltos o sistema oscila apenas em
torno de um ponto de equilíbrio e depois oscila em torno de três, mudando a
dinâmica do sistema. Dependendo do valor da frequência de forçamento o sistema
pode ou não passar por uma região caótica antes do salto.
Figura 4.19 – Eficiência para o sistema biestável com valores diferentes da
frequência de forçamento considerando acoplamentos piezoéletricos linear e não
linear. 𝜔
̅ =1,0; (b) 𝜔
̅ = 1,5 e (c) 𝜔
̅ = 2,0.
59
A fim de estabelecer uma comparação entre os diferentes tipos de soluções, adota-se
como referência um sistema biestável com acoplamento piezoelétrico linear (β = –1,2; α
= 0,3; 𝜉1 = 𝜉2 = 0). Três frequências são analisadas e os diagramas de eficiência são
apresentados juntos (Figura 4.20). Nota-se que para = 1,609, os três sistemas têm mais
ou menos a mesma eficiência, mas apresentam tipos diferentes de soluções, também
representados na Figura 4.20. Duas respostas periódicas e uma resposta caótica estão em
comparação. A colheita de energia associada às soluções periódicas estão diretamente
relacionadas com a amplitude da resposta. A energia gerada pela resposta caótica é
diferente e possui expoente de Lyapunov positivo.
Figura 4.20 - Detalhes da dinâmica do sistema biestável (β = –1,2; α = 0,3; 𝜉1 = 𝜉2 = 0)
para diferentes valores da frequência de forçamento, 𝜔
̅ =1,0; 1,5 e 2,0.
60
Uma análise mais detalhada relacionada sobre a influência da natureza qualitativa
da resposta da colheita de energia é tratada a seguir. A ideia é comparar respostas com
eficiências semelhantes, mas com dois tipos distintos qualitativos de resposta.
Inicialmente, consideram-se duas respostas periódicas com eficiência semelhante,
indicado na Figura 4.21. Note que a amplitude define a energia coletada.
As Figuras 4.22 e 4.23 estabelecem uma comparação entre os diferentes
comportamentos qualitativos: periódico e caótico. A Figura 4.22 mostra que a resposta
caótica gera mais energia, mas observando a Figura 4.23, é evidente que a influência da
amplitude é maior do que o tipo de resposta. Portanto, a conclusão sobre que tipo de
resposta é melhor em termos de desempenho na colheita de energia é mais complexa do
que isso e pode estar relacionado com o período tratado do sistema.
Figura 4.21 - Comparação entre diferentes respostas com eficiência similar para um
sistema biestável com acoplamento piezoelétrico linear (β = –1,2; α = 0,3; 𝜉1 = 𝜉2 = 0;
𝜔
̅ =1,5).
61
Figura 4.22 - Comparação entre diferentes respostas com eficiência similar para um
sistema biestável com acoplamento piezoelétrico linear (β = –1,2; α = 0,3; 𝜉1 = 𝜉2 = 0;
𝜔
̅ =1,5).
Figura 4.23 - Comparação entre diferentes respostas com eficiência similar para um
sistema biestável com acoplamento piezoelétrico linear (β = –1,2; α = 0,3; 𝜉1 = 𝜉2 = 0;
𝜔
̅ =1,5).
62
5 CONCLUSÕES
Este trabalho investiga os efeitos não-lineares no processo de colheita de energia
baseada em vibração. Não-linearidades mecânicas e constitutivas do material
piezoelétrico são tratadas. A não-linearidade mecânica é considerada como um
oscilador tipo Duffing analisando sistemas monoestáveis e biestáveis. A não-linearidade
constitutiva do material piezoelétrico contempla uma equação constitutiva quadrática
para descrever o acoplamento eletromecânico do elemento piezoelétrico.
Um sistema arquétipo composto de um oscilador mecânico acoplado a uma
resistência elétrica por meio de um elemento piezoelétrico é adotado na análise.
Consideram-se diferentes condições de excitação harmônica de base, variando tanto a
frequência quanto à amplitude de forçamento. As potências de entrada e saída,
instantânea e média, são monitoradas assim como a eficiência definida a partir da
relação entre elas.
A introdução de não-linearidades no sistema introduz uma série de características
que podem ser exploradas no contexto da colheita de energia. Uma resposta rica é a
primeira característica importante, o que inclui respostas periódicas, caóticas e saltos
dinâmicos. Soluções multiestáveis podem surgir sob determinadas condições, como foi
mostrado na análise da influência da amplitude de forçamento.
Em geral, os sistemas monoestáveis possuem melhor desempenho sob condições de
ressonância e contempla mais frequências com alto desempenho. Por outro lado, os
sistemas biestáveis apresentam mais possibilidades dinâmicas contendo diferentes
soluções periódicas e caóticas. Saltos dinâmicos também estão presentes na solução dos
sistemas biestáveis. Os sistemas monoestáveis atingem valores maiores de eficiência
durante o aumento da frequência. Por outro lado, os sistemas biestáveis atingem maiores
63
valores de eficiência durante o decréscimo da frequência. Os sistemas biestáveis ainda
permitem soluções que oscilam em torno de um ou três pontos de equilíbrio. As
respostas que oscilam entre três pontos estão relacionadas a maiores níveis energia e
maior eficiência.
A não-linearidade piezoelétrica possui grande influência no desempenho do
sistema de colheita de energia, especialmente sob condições de ressonância. Em geral, a
eficiência da colheita de energia aumenta. Pode-se perceber que a mudança principal
ocorre nas curvas de saída de energia, e portanto o acoplamento piezoelétrico não-linear
melhora o desempenho do sistema aumentando a energia gerada. Pequenas mudanças
nos parâmetros de acoplamento quadrático piezoelétrico não-linear variam a eficiência
de absorção da energia na saída.
Multiestabilidade de soluções estáveis mudam de forma drástica a dinâmica do
sistema, aumentando o número de regiões onde se tem maior eficiência. Para diferentes
valores de amplitude de forçamento, obtêm-se dentro da região caótica com menor
amplitude, a mesma eficiência do que com amplitude de forçamento maior. Assim, é
necessário fornecer menos energia dentro da região caótica para chegar à mesma
eficiência que em regiões periódicas.
Assim sendo, aspectos não-lineares introduzem alternativas interessantes para
fins de colheita de energia, quer através do aumento da energia coletada ou do aumento
da capacidade geral do sistema devido a comportamentos mais ricos.
64
6
TRABALHOS FUTUROS
Uma sequência natural para este trabalho é a realização de testes experimentais
que comprovem as conclusões obtidas com as simulações numéricas. A partir dessas
análises, é possível aprimorar ainda mais os modelos utilizados, o que permitirá pensar
em outras alternativas para explorar as não-linearidades do sistema para a colheita de
energia.
Uma evolução para explorar as não-linearidades do sistema é o controle de caos,
que permite estabilizar órbitas periódicas instáveis imersas no atrator caótico. Desta
forma, pode-se escolher órbitas que possuam melhor desempenho em termos de colheita
de energia. Outra possibilidade para um trabalho futuro é explorar o uso sinérgico de
materiais inteligentes, acoplando elementos com memória de forma.
A mudança no circuito da colheita de energia apresentado também deve ser
considerada. O circuito contido no modelo do trabalho é um resistor e na maioria das
vezes a corrente não é constante por causa do nível de excitação mecânica. Então a
proposta é utilizar um retificador AC-DC seguido por um conversor DC-DC para
aumentar o fluxo de energia para a bateria. Outras possibilidades incluem o circuito
SSHI (synchronized switch harvesting on inductor) em paralelo.
65
7 REFERÊNCIAS BIBLIOGRÁFICAS
Barbosa W. O. V. e de Paula A. S., 2013. “Experimental Investigation of Power
Harvesting in a Mechanically Excited Piezoelectric Beam”, 22nd International
Congress of Mechanical Engineering (COBEM).
Belly C., Claeyssen F., Le Letty R., Porchez T., 2010. “Benefits from Amplification of
Piezo Actuation in Inertial Stepping Motors and application for High- Inertial
Stepping Motors and application for High-performance Linear Micro Motors
performance Linear Micro Motors”, Cedrat Technologies S.A.
Claeyssen, F., Le Letty, R., Lhermet, N., Bouchilloux, P., 1997. “New amplified
piezoelectric actuator for precision positioning and active damping”, Smart
Structures and Materials Vol. 3041, p. 496-504.
Crawley, E. F. and Anderson E.H., 1990, “Detailed models of piezoceramic actuation of
beams”, Journal of Intelligent Material Systems and Structures 1: 4–25.
Cottone, F., Vocca, H. and Gammaitoni, L., 2009, “Nonlinear energy harvesting”,
Physical Review Letters, Vol. 102, 080601.
De Marqui Jr., C. and Erturk, A., 2013, “Airfoil-based Linear and Nonlinear
Electroaeroelastic Energy Harvesting”. Chapter 11 in Advances in Energy
Harvesting Methods, pp. 269-294, Springer, New York (Eds. Elvin, N. and Erturk,
A.).
D. Guyomar, N. Aurelle e L. Eyraud., “Piezoelectric Ceramics Nonlinear Behavior.
Application to Langevin Transducer”. J. Phys. III France, 7 6 (1997) 1197-1208.
De Paula A. S., Inman D. J., and Savi M. A., 2015 “Energy harvesting in a nonlinear
piezomagnetoelastic beam subjected to random excitation”, Mechanical Systems and
Signal Processing, Vol. 54, pp. 405-416.
66
Dias, J.A.C., De Marqui, Jr., C. and Erturk, A., 2013, “Hybrid Piezoelectric-Inductive
Flow Energy Harvesting and Dimensionless Electroaeroelastic Analysis for
Scaling”, Applied Physics Letters, 102, 044101 (5pp).
du Toit, N.E. e Wardle, B.L. 2007. “Experimental Verification of Models for
Microfabricated Piezoelectric Vibration Energy Harvesters”, AIAA Journal,
45:1126_1137.
du Toit, N.E. e Wardle, B.L. 2006. ‘‘Performance of Microfabricated Piezoelectric
Vibration Energy Harvesters’’, Intgr. Ferro.,83:13-32.
du Toit, N.E. 2005. ‘‘Modeling and Design of a MEMS Piezoelectric Vibration Energy
Harvester”, Master’s Thesis, Massachusetts Institute of Technology, Cambridge,
MA.
Erturk, A. and Inman, D.J., 2009. “Electromechanical Modeling of Cantilevered
Piezoelectric Energy Harvesters for Persistent Base Motions”, Energy Harvesting
Technologies, Chapter 2, pp. 41-77, Springer, New York (Eds: S. Priya and D.J.
Inman).
Erturk, A. and Inman, D. J., 2009, “An experimentally validated bimorph cantilever
model for piezoelectric energy harvesting from base excitations”, Smart Materials
and Structures, Vol. 18, 025009.
Erturk, A. e Inman, D.J. 2011. “Piezoelectric Energy Harvesting”, John Wiley & Sons
Ltd., Chichester, UK.
Fang H.B, Liu J. Q., Xu Z.Y., Dong L., Wang L., Chena D., 2006. “Fabrication and
performance of MEMS-based piezoelectric power generator for vibration energy
harvesting”, Microelectronics Journal 37 1280–1284.
67
Feenstra, J., Granstrom, J., Sodano, H.A., 2008. “Energy Havesting Through A
Backpack Employing A Mechanically Amplified Piezoelectric Stack”, Mechanical
Systems And Signal Processing”, 22, 721-734.
Fei, F., Maib, J.D. e Lia, W.J. 2011. “A Wind-Flutter Energy Converter for Powering
Wireless Sensors” Sensors and Actuators A: Physical.Volume 173, Issue 1, January
2012, Pages 163–171
GmbH & KG, C. , 2006. “The world of nanopositioning and Micropositioning”, Physik
Instrumente.
Goldfarb, M. e Celanovic, N., 1997. “Modeling piezoelectric stack actuators for control
of micromanipulation”, IEEE Control Syst. Mag. 17, 69-79.
Guckenheimer e Holmes , 1983. “Nonlinear Oscillations, Dynamical Systems, and
Bifurcations of Vector Fields”, Springer.
Harb A., 2011. “Energy harvesting: State-of-the-art”, Renewable Energy 36 2641 e
2654.
Hu, Y., Xue, H., Yang, J. e Jiang, Q. 2006. ‘‘Nonlinear Behavior of a Piezoelectric
Power Harvester Near Resonance’’, IEEE Trans. Ultrason., Ferroelectr., Freq.
Control, 53:1387_1391.
Inman, D.J. and Cudney, H.H. 2000. “Structural and Machine Design Using
Piezoceramic Materials: a Guide for Structural Design Engineers”, Final Report
NASA Langley Grant NAG-1-1998.
Jordan, T.L. e Ounaies, Z. 2001. “Piezoelectric ceramics characterization”, NASA.
Kim, S.H., Ahn. J.H., Chung, H. e Kang, H., 2011. “Analysis of piezoelectric effects on
various loading conditions for energy harvesting in a bridge system”, Sensors and
Actuators A: Physical.
68
Lagoudas,D. C., 2008, “Shape Memory Alloys: Modeling and Engineering
Applications”, Springer.
Leadenham, S. and Erturk, A., 2015. “Unified nonlinear electroelastic dynamics of a
bimorph piezoelectric cantilever for energy harvesting, sensing, and actuation”,
Nonlinear Dynamics, Vol. 79, pp.1727–1743.
Lefeuvre, E., Badel, A., Richard, C., Petit, L. and Guyomar, D., 2006, “A comparison
between several vibration-powered piezoelectric generators for standalone systems”,
Sensors Actuators A, Vol. 126, pp.405–416.
Leo, Donald J., 2007. “Engineering Analyses of smart material systems”, Jonh Wiley &
Sons. INC.
Li, Q.; Naing, V. e Donelan, J.M., 2009. “Development of a Biomechanical Energy
Harvester”, Journal of Neuro-Engineering and Rehabilitation, Vol. 6, Article
Number: 22.
Liu J. Q., Fang H. B., Xu Z. Y., Mao X.H., Shen X.C., Di Chena, Liao H., 2008 .“A
MEMS-based piezoelectric power generator array for vibration energy harvesting”
Microelectronics Journal 39 802–806.
Merry, R., Molengraft, R., e Steinbuch, M., 2010. “Modeling of a walking piezo
actuator”, Sensors and Actuators A: 162: 51–60.
Moulson A. J. e Herbert, J. M., 2003. “Electroceramics”, Second Edition Materials,
Wiley.
Nuffer J., Bein T., 2006. “Application of piezoelectric materials in Transportation
industry”, Global Symposium on Innovative Solutions for the Advancement of the
Transport Industry, 4.-6.
69
Oliveira S. A., Savi M. A., Kalamkarov A. L., 2010. “A Three-Dimensional Constitutive
Model For Shape Memory Alloys”, Archive Of Applied Mechanics, Vol. 80, Issue:
10, pp. 1163-1175.
Ottman, G. K. and George, A., Lesieutre, G. A., 2003, “Optimized Piezoelectric Energy
Harvesting Circuit Using Step-Down Converter in Discontinuous Conduction
Mode”, IEEE Transactions on Power Electronics, Vol. 18, No. 2.
Qi Y.,Jafferis N., Lyons K., Lee C., Ahmad H., McAlpine M., 2010, “Piezoelectric
Ribbons Printed onto Rubber for Flexible Energy Conversion”, Nano Letters, Vol:
Articles ASAP.
Quinn, D.D., Vakakis, A.F. and Bergman, L.A. 2007. ‘‘Vibration Based Energy
Harvesting
with
Essential
Non-linearities’’,
ASME
International
Design
Engineering.
Ramlan, R., Brennan, M.J., Mace, B.R. and Kovacic, I., 2010, “Potential benefits of a
nonlinear stiffness in an energy harvesting device”, Nonlinear Dynamics, Vol. 59(4),
pp.545–558.
Schwartz M.M., 2002. “Encyclopedia of Smart Materials”, Wiley J. and Sons.
Shen. D., Park J., Noh J. H., Choe S. Y., Kim S. H., Wikle III H. C., Kim D. J., 2009.
“Micromachined PZT cantilever based on SOI structure for low frequency vibration
energy harvesting”, Sensors and Actuators A :154 103–108.
Shen, H., Qiu, J., Ji, H., Zhu, K. and Balsi, M., 2010, “Enhanced synchronized switch
harvesting: a new energy harvesting scheme for efficient energy extraction”, Smart
Material and Structures, Vol. 19, pp. 115017.
Shu Y. C. e Lien I. C., 2006. “Analysis of power output for piezoelectric energy
harvesting systems”, Smart Mater. Struct. 15 1499–1512.
70
Silva, L.L., Savi, M.A., Monteiro Jr, P.C.C and Netto, T.A. 2013. “On the Effect of the
Piezoelectric Hysteretic Behavior in the Vibration-Based Energy Harvesting”,
Journal of Intelligent Material Systems and Structures, 24:1278-1285.
Silva, L. L., Monteiro, P. C., Savi, M. A. and Netto, T. A., 2015, “On the Nonlinear
Behavior of the Piezoelectric Coupling on Vibration-Based Energy Harvesters”,
Shock and Vibration, Vol. 2015, Article ID 739381.
Sodano, H.A., Inman, D.J. and Park, G. 2004. “A Review of Power Harvesting from
Vibration Using Piezoelectric Materials”, Shock and Vibration Digest, 36:197-205.
Sodano, H.A., Park, G. and Inman, D.J. 2004. “Estimation of Electric Charge Output
for Piezoelectric Energy Harvesting”, Strain, 40:49-58.
Sousa V. C., Anicézio M. de M., De Marqui Jr C. e Erturk A., 2011. “Enhanced
aeroelastic energy harvesting by exploiting combined nonlinearities: theory and
experiment”,Smart Mater. Struct. 20 094007 (8pp).
Stanton, S.C., McGehee, C.C. and Mann, B.P., 2009, “Reversible hysteresis for
broadband magnetopiezoelastic energy harvesting”, Applied Physics Letters, Vol. 95
(17), 174103.
Stanton, S. C., Erturk, A., Mann, B. P. and Inman, D. J., 2010, “Nonlinear
piezoelectricity in electroelastic energy harvesters: modeling and experimental
identification”, Journal of Applied Physics, Vol. 108(7), 074903.
Sun H., Yang Z., Li K., Li B., Xie J., Wu D. e Zhang L., 2009. “Vibration suppression
of a hard disk driver actuator arm using piezoelectric shunt damping with a
topology-optimized PZT transducer”, Smart Mater. Struct. 18 065010.
Waanders, J. W., 1991. “Piezoelectric Ceramic, Properties and Applications”, Philips
Components, Eindhoven, Netherlands.
71
Triplett, A. and Quinn, D.D. 2009. “The effect of non-linear piezoelectric coupling on
vibration-based energy harvesting”, Journal of Intelligent Material Systems and
Structures, 20:1959-1967.
Williams, C. B. e Yates, R. B., 1996. “ Analysis of a micro-electric generator for
microsystems”, Sensors and Actuators A, Vol.52, pp. 8-11, ISSN 0924-4247.
Wolf, A; Swift, J.B; Swinney, H.L e Vastano, J.A. 1985. “Determining Lyapunov
expoents from a times series”, Physica 16D, pp.285-317.
Zhu, M. and Leighton, G. 2008. “Dimensional reduction study of piezoelectric ceramics
constitutive equations from 3-D to 2-D and 1-D”, IEEE Trans. Ultrason Ferroelectr.
Freq. Control, 55 (11):23
72