Sistemas Lineares e métodos de resolução.
Plano Cartesiano ou Ortogonal é a superfície sobre a qual são representadas
funções de uma variável. Funções de três variáveis são representadas no espaço (ternas
ortogonais) e assim por diante.
Um ponto é a representação de um par ordenado (duas variáveis), de uma terna
ordenada (três variáveis) e assim por diante.
Uma função é dita linear quando tem por gráfico uma reta.
ax by c
Reta no plano:
Reta no espaço: ax by cz d
ax by cz dw e
Reta no R4:
A equação de uma reta (ou função do primeiro grau) pode ser escrita de várias
formas diferentes. As formas são (equações escritas para funções de uma variável):
Reduzida:
y ax b
Analítica:
y y 0 m( x x 0 )
Geral:
ax by c 0
Segmentária:
x y
1
a b
x at b
Paramétrica:
y ct d
Neste estudo, utilizaremos o formato “geral”.
Outro aspecto que merece sua atenção é a resolução de sistemas.
Se o sistema possui duas incógnitas e duas equações, ele pode ser resolvido
por adição ou por substituição.
1
As técnicas serão revistas por meio de exemplos.
x 2y 3
Exemplo: resolva por adição (ou cancelamento) o sistema:
4 x 2 y 6
A técnica consiste em igualar numericamente os coeficientes de uma mesma
incógnita, mas com sinais diferentes para que, no processo de adição, essa incógnita seja
cancelada. Veja:
x 2y 3
4 x 2 y 6
(1)
x 2y 3 (* 1)
4 x 2 y 6
(1) A incógnita y tem coeficiente “2” nas duas equações, ambos positivos, para
cancelá-lo é só multiplicar uma das equações por (-1).
x 2y 3
4x 2y 6
(1)
x 2y 3
4x 2y 6
( 2)
x 2y 3
4x 2y 6
3x 0 3
Somando cada lado da igualdade (2) reduzimos o sistema a uma equação cuja
solução é:
3x 3
x
3
3
x 1
Calculado o valor de x, é só calcular o valor de y, utilizando qualquer uma das
equações do sistema:
Em x 2y 3 é só fazer:
1 2y 3 2y 3 1 2y 2 y
2
y 1.
2
A resposta para esse sistema é V S {1, 1} .
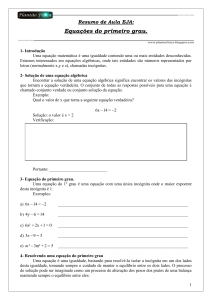
Representar graficamente o sistema e sua solução significa desenhar as duas
retas e mostrar o ponto de interseção:
Resolvendo por substituição:
O próprio nome diz que se deve substituir uma das equações, então, em:
x 2y 3 (I)
4 x 2y 6 (II )
2
Vamos isolar “x” na equação (I) e substituir o “x” da equação (II) pelo resultado
encontrado:
x 2y 3 (I) x 3 2y
4x 2y 6 (II ) 4 * (3 2y ) 2y 6
x
12 8y 2y 6
6
y
y 1
6
6y 6 12
6y 6
Se y = 1 então
x 3 2y
x 3 2 *1
x 32
x 1.
Veja com atenção: trata-se da mesma resposta encontrada pelo método da
adição ou cancelamento.
O método da substituição de aplica a sistemas 3x3, 4x4, etc., e a sistemas
retangulares (sistemas retangulares são aqueles em que o número de equações é diferente
do número de incógnitas). Existem outros métodos de resolução de sistemas que, nesse
momento, não serão abordados.
Um exemplo de sistema 3x3: Calcule os valores de x, y e z no sistema:
x y z 6
x y z 2
2x y z 1
Orientação (o que fazer?)
Isolar o “x” na primeira
equação.
Substituir o “x” nas outras duas
equações.
Simplificando as expressões:
Calculando o valor de “y” na
primeira expressão:
Substituir o valor de “y” na
segunda equação:
Agora que você conhece os
valores de y e z, você poderá
calcular o valor de x:
No sistema fica assim
x 6 x z
x y z 2
2x y z 1
yzyz2
6
x
6 y z) y z 1
2 * (
x
6 2y 2
6 2y 2
12 2y 2z y z 1
y 3z 11
2 y 2 6
2y 4
y 2
y 3z 11
y 3z 11
y 3z 11
y 2
2 3z 11
3z 9
z3
x 6yz
x 623
x 1
A resposta do sistema é: x = 1; y = 2 e z = 3, ou, V = {1, 2, 3}.
3
Outro tipo de resolução possível é a chamada Regra de Cramer que consiste no
cálculo de determinantes. A regra diz que:
x
x
;
y
y
;
z
z
; ...
Veja o exemplo:
x y z 6
x y z 2
2x y z 1
Primeiro passo: associar as matrizes ao sistema:
x y z 6
x y z 2
2x y z 1
1 1 1 x 6
1 1 1 * y 2
2 1 1 z 1
Segundo passo: calcular os determinantes:
(a) Da matriz principal:
1 1 1 1 1 1 1 1
1 1 1 1 1 1 1 1 (1 2 1) ( 2 1 1) 6
2 1 1 2 1 1 2 1
(b) Da matriz alterada pelos coeficientes de x:
6 1 1 6 1 1 6 1
2 1 1 2 1 1 2 1 (6 1 2) ( 1 6 2) 9 3 6
1 1 1 1 1 1 1 1
(c) Da matriz alterada pelos coeficientes de y:
1 1 1 1 1 1 1 1
1 1 1 1 1 1 1 1 (1 2 1) ( 2 1 1) 6
2 1 1 2 1 1 2 1
Sistemas possíveis (determinados e indeterminados) e impossíveis.
Um sistema será possível determinado quando possui uma única solução; será
possível indeterminado quando possui inúmeras soluções e será impossível quando não
possuir nenhuma solução.
Exercícios:
4
1.
Dois primos em passeio na fazenda do avô estavam entediados pela falta dos jogos
eletrônicos, quando um deles resolveu fazer uma “charada” para o outro e propôs:
– Daqui onde estou consigo enxergar 18 animais e contar 50 pés/patas. Se os animais
são porcos e galinhas, quantas galinhas eu estou vendo?
2.
Verifique quais das duplas (x, y) são soluções da equação linear x 2y 6 :
a. (0, 3)
b. (1, 2)
c. (–2, 4)
d. (10, –2)
e. (2, 1)
3.
Resolva os seguintes sistemas de duas equações e duas incógnitas:
x y 5
a.
x y 1
x 2y 1
b.
2 x y 7
2x 5 y 17
c.
3 x 2y 16
4.
Na geladeira de Ana há 15 litros de refrigerante, dispostos tanto em garrafas de um litro
e meio, quanto de 600 ml. Qual é a quantidade de garrafas de cada capacidade sabendo-se
que são 13 garrafas no total?
a. 8 e 5, respectivamente
b. 5 e 8, respectivamente
c. 9 e 6, respectivamente
d. 10 e 3, respectivamente
e. 6 e 7, respectivamente
5.
Comprando 5 unidades de um produto A mais 3 unidades de um produto B, terei que
desembolsar R$ 90,00. Se eu comprar 15 unidades do produto A e 9 unidades do produto B,
pagarei R$ 250,00. Qual é o preço unitário de cada um dos produtos?
a. R$ 5,00 e R$ 6,00 respectivamente.
b. R$ 5,00 e R$ 7,50 respectivamente.
c. R$ 8,00 e R$ 9,00 respectivamente.
d. O sistema apresenta inúmeras soluções.
e. O sistema é impossível.
6.
A soma de dois números é 530 e a diferença entre eles é 178. Quais são estes
números?
7.
A metade da diferença entre dois números é 325 e o dobro de seu quociente é 28.
Calcule os números.
5
8.
2x 3 y 4z 9
(UFES) O sistema linear x y 2z 2
x 4 y 2z 7
a. Admite solução única.
b. Admite infinitas soluções.
c. Admite apenas duas soluções.
d. Não admite solução
e. Nenhuma das alternativas anteriores.
9.
x 2y 5
Resolva 3 x z 7
2 y z 0
x y z t 0
3 x y z 3
10. Calcule o valor de y em
é:
2y z 2t 3
2z 4t 0
a. 0,5
b. 0
c. –0,5
d. –1
e. –1,5
Gabarito:
1.
11 galinhas.
2.
a, c, d
3.
(a) V = { 3, 2}; (b) V = {3, –1}; (c) V = {6, 1}
4.
a
5.
e
6.
Os números são 354 e 176.
7.
Os números são 50 e 700.
8.
b
9.
V = {1, 2, 4}
10. e
Referências bibliográficas:
BIANCHINI, Edwaldo e PACCOLA, Herval. Matemática 2. 1. ed., São Paulo: Moderna,
1989.
6
PIERRO NETTO, Scipione di e ORSI Filho, Sérgio. Quanta: matemática em fascículos para
o ensino médio. Fascículo 5: Matrizes, Determinantes e Sistemas lineares. 1. ed., São
Paulo: Saraiva, 2000.
SOUZA, Joamir. Roberto de. Novo olhar matemática: versão com trigonometria, volume 2.
1. ed., São Paulo: FTD, 2011.
7