ESTADO DO MATO GROSSO SECRETÁRIA DE ESTADO DE CIÊNCIA
E TECNOLOGIA UNIVERSIDADE DO ESTADO DE MATO GROSSO
CAMPUS UNIVERSITÁRIO DE SINOP FACULDADE DE CIÊNCIAS
EXATAS E TECNOLÓGICAS: CURSO DE ENGENHARIA ELÉTRICA
PRINCÍPIO DE FUNCIONAMENTO
DE MOTORES DE INDUÇÃO
TRIFÁSICOS
SINOP-MT, 2016
ESTADO DO MATO GROSSO SECRETÁRIA DE
ESTADO DE CIÊNCIA E TECNOLOGIA
UNIVERSIDADE DO ESTADO DE MATO GROSSO
CAMPUS UNIVERSITÁRIO DE SINOP
FACULDADE DE CIÊNCIAS EXATAS E
TECNOLÓGICAS
ENGENHARIA ELÉTRICA – 8° SEMESTRE
Trabalho apresentado ao Professor
Emerson Ricardo de Moraes de
máquinas elétricas, do curso de
engenharia elétrica, como parte das
exigências para avaliação da disciplina.
PRINCÍPIO DE FUNCIONAMENTO DE
MOTORES DE INDUÇÃO TRIFÁSICOS
EDUARDO APARECIDO FRANCO JOSÉ DOS SANTOS
ERIVALDO EVARISTO DE LIMA
JADER WILLIAN EVARISTO
MARCELO MATEUS RIEGER
Sumário
1.
INTRODUÇÃO ........................................................................................................................ 1
2.
PRINCÍPIO DE FUNCIONAMENTO DO MOTOR DE INDUÇÃO TRIFÁSICO .............................. 2
2.1.
LEI DE FARADAY............................................................................................................. 3
2.2.
LEI DE LENZ .................................................................................................................... 3
2.3.
EXISTEM DOIS TIPOS DE MOTORES DE INDUÇÃO TRIFÁSICOS: .................................... 4
2.3.1.
ROTOR EM GAIOLA ................................................................................................ 4
2.3.2.
ROTOR BOBINADO (EM ANÉIS). ............................................................................ 5
2.4.
3.
CAMPO MAGNÉTICO GIRANTE ..................................................................................... 6
2.4.1.
VELOCIDADE DO CAMPO GIRANTE ....................................................................... 7
2.4.2.
VELOCIDADE DO ROTOR........................................................................................ 7
2.5.
ESCORREGAMENTO....................................................................................................... 8
2.6.
CURVA TORQUE-ESCORREGAMENTO ........................................................................... 9
2.7.
VANTAGENS E DESVANTAGENS .................................................................................. 10
CONCLUSÃO ........................................................................................................................ 11
1. INTRODUÇÃO
Uma questão fundamental em todo tipo de motor elétrico é entender como
se produz o movimento rotatório de um eixo (energia mecânica) a partir de
corrente elétrica (energia elétrica). Em palavras mais técnicas, como se produz
um torque eletromecânico no rotor. Como se sabe, torque (ou conjugado) é
definido pelo produto de uma força por uma distância, sendo medido em
Newton-metro (N.m) no sistema SI.
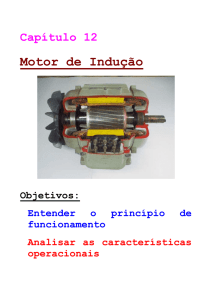
Em um motor de indução, a criação do torque no rotor baseia-se na lei
de indução de Faraday e na lei de Lenz. O princípio de funcionamento de um
motor de indução pode ser entendido com a ajuda da figura abaixo, onde se
mostra um imã permanente em formato de ferradura que está suspenso,
através de um fio, sobre um leve disco metálico que pode girar facilmente em
torno de seu eixo, graças a uma suspensão cônica apoiada em uma base fixa.
Imagine que o imã permanente começa a girar em torno de seu eixo, por
exemplo torcendo-se o fio, enquanto o disco está parado. O fluxo magnético
NS produzido pelo imã começa a varrer a superfície do disco, caracterizando
um fluxo variável ao longo do tempo. Essa variação produz a indução de uma
tensão no disco, pela lei de Faraday, e consequentemente a circulação de
correntes, pois o disco é metálico. Essas correntes induzidas têm sentido de
circulação determinados pela lei de Lenz (o fluxo criado por elas deve se opor à
variação do fluxo), de tal modo que criam no disco polaridades magnéticas
opostas aos polos do imã permanente. Sob o polo norte do imã cria-se um polo
sul no disco, que se atraem. No outro polo acontece a mesma coisa. Em
consequência, o disco gira no mesmo sentido do movimento do imã. Se o
sentido de rotação do imã permanente for invertido, também inverte-se o
sentido de giro do disco.
Essa montagem acima apenas descreve o princípio de funcionamento,
sendo que em um motor de indução real, o imã permanente girando é
substituído por um campo girante criado por três bobinas fixas no estator, nas
quais circulam correntes alternadas defasadas de 120 graus, e o disco metálico
é substituído por um rotor cilíndrico na forma de uma gaiola metálica, como
ilustrado na figura abaixo. Note que a gaiola possui aros metálicos na tampa e
na base, de tal modo a curto-circuitar as varetas e permitir a circulação de
correntes por elas.
2. PRINCÍPIO DE FUNCIONAMENTO DO MOTOR DE
INDUÇÃO TRIFÁSICO
O princípio de funcionamento do motor de indução trifásico é o mesmo de
todos os motores elétricos, ou seja, baseia-se na iteração do fluxo magnético
com uma corrente em um condutor, resultando numa força no condutor. Esta
força é proporcional às intensidades de fluxo e de corrente.
O estator está ligado à fonte de alimentação CA. O rotor não está ligado
eletricamente a nenhuma fonte de alimentação.
Quando o enrolamento do estator é energizado através de uma alimentação
trifásica, cria-se um campo magnético girante.
À medida que o campo varre os condutores do rotor, é induzida uma fem
nesses condutores ocasionando o aparecimento de uma corrente elétrica nos
condutores. Os condutores do rotor, percorridos por corrente elétrica,
interagem com o campo magnético girante do estator para produzir um torque
eletromagnético que atua sobre os condutores do rotor fazendo-o girar.
Entretanto, como o campo do estator gira continuamente, o rotor não
consegue se alinhar com ele. A velocidade do rotor é sempre menor que a
velocidade síncrona (velocidade do campo girante).
2.1.
LEI DE FARADAY
“Sempre através da superfície abraçada por um circuito tiver lugar uma
variação de fluxo, gera-se nesse circuito uma força eletromotriz induzida. Seu
circuito é fechado será percorrido por uma corrente induzida.”
2.2.
LEI DE LENZ
O sentido da corrente induzida é tal que esta pelas suas ações magnéticas
tende sempre a impor-se a causa que lhe deu origem
De acordo com a Lei de Lenz, qualquer corrente induzida tende a se opor
às variações do campo que a produziu. No caso de um motor de indução, a
variação é a rotação do campo do estator, e a força exercida sobre o rotor pela
reação entre o rotor e o campo do estator é tal que tenta cancelar o movimento
contínuo do campo do estator.
Esta é a razão pela qual o rotor acompanha o campo do estator, tão
próximo quanto permitam o seu peso e a carga. O motor de indução tem
corrente no rotor por indução, e é semelhante a um transformador com
secundário girante.
É impossível para o rotor de um motor de indução girar com a mesma
velocidade do campo magnético girante. Se as velocidades fossem iguais, não
haveria movimento relativo entre eles e, em consequência, não haveria fem
induzida no rotor. Sem tensão induzida não há conjugado (torque) agindo sobre
o rotor.
A diferença percentual entre as velocidades do campo girante e do rotor é
chamada de deslizamento (S de “slip”). O deslizamento também é comumente
chamado de escorregamento.
Quanto menor for o escorregamento, mais se aproximarão as velocidades
do rotor e do campo girante (velocidade síncrona). A velocidade do motor de
indução cai, com cargas pesadas.
2.3.
EXISTEM DOIS TIPOS DE MOTORES DE INDUÇÃO TRIFÁSICOS:
2.3.1. ROTOR EM GAIOLA
A gaiola possui anéis metálicos na tampa e na base, de tal modo a curtocircuitar as barras e permitir a circulação de correntes por elas. O rotor em
gaiola de esquilo é constituído por um núcleo de chapas ferromagnéticas,
isoladas entre si, sobre o qual são inseridas barras de cobre, dispostas
paralelamente entre si e unidas nas suas extremidades por dois anéis
condutores, que curto-circuitam as barras. As barras da gaiola de esquilo
podem ainda ser fabricadas de alumínio injetado ou liga de latão. As barras do
rotor tipo gaiola de esquilo nem sempre são paralelas ao eixo do rotor. As
mesmas podem ser deslocadas ou colocadas segundo um pequeno ângulo em
relação a ele, para produzir um torque mais uniforme e para reduzir o ruído
magnético durante a operação do motor. O estator do motor é também
constituído por um núcleo ferromagnético laminado, nas cavas do qual são
colocados os enrolamentos alimentados pela rede de corrente alternada
trifásica.
2.3.2. ROTOR BOBINADO (EM ANÉIS).
O motor de indução de rotor bobinado difere do motor de rotor em gaiola
de esquilo apenas quanto ao rotor. O rotor é constituído por um núcleo
ferromagnético laminado sobre o qual são alojadas as espiras que constituem o
enrolamento trifásico, geralmente em estrela. Os três terminais livres de cada
uma das bobinas do enrolamento trifásico são ligados a três anéis coletores.
Estes três anéis ligam-se externamente a um reostato de partida, constituído
por resistências variáveis, ligadas também em estrela. Deste modo os
enrolamentos do rotor também ficam em circuito fechado.
A função do reostato de partida, ligado aos enrolamentos do rotor, é a de
reduzir as correntes de partida elevadas e ao mesmo tempo elevar o torque,
possibilitando a partida de cargas pesadas, no caso de motores de elevada
potência.
2.4.
CAMPO MAGNÉTICO GIRANTE
Este
princípio
do
eletromagnetismo
clássico
é
extremamente
interessante e sua descoberta possibilitou o desenvolvimento dos modernos
motores de corrente alternada, em particular os motores de indução. De modo
sintético, seu enunciado é: “Três correntes alternadas senoidais, com mesma
amplitude e defasadas de 120º, circulando por três bobinas fixas, cujos eixos
magnéticos distam 120º entre si, produzem um campo magnético girante de
intensidade constante.” A invenção desta engenhosa maneira de criar este
campo se deve a um brilhante engenheiro croata, Nikola Tesla (1856-1943).
2.4.1. VELOCIDADE DO CAMPO GIRANTE
A velocidade do campo girante em um motor de indução é chamada
velocidade síncrona. Como já mencionado, essa velocidade depende da
frequência da tensão trifásica de alimentação do motor. Quanto maior a
frequência, maior a velocidade. Porém, os motores de indução podem ser
construídos com número de polos diferentes de dois e, nesse caso, o número
de polos precisa ser levado em conta. Para motores de indução, a relação
entre velocidade do campo girante, frequência da tensão e número de polos é
a mesma deduzida anteriormente para os alternadores, ou seja:
120. Em que ns é a velocidade do campo girante (síncrona) em rpm, o
número de polos é p e f é a frequência expressa em Hz.
2.4.2. VELOCIDADE DO ROTOR
Em qualquer motor de indução, a velocidade do rotor (que é a mesma do
eixo) é sempre menor que a velocidade síncrona (do campo girante). Se, por
hipótese, o rotor conseguisse alcançar a velocidade síncrona, então o campo
girante e o rotor gaiola estariam efetivamente parados (um em relação ao
outro), não haveria variação relativa de fluxo e portanto indução. Em regime
permanente, a velocidade do rotor depende da diferença relativa das
frequências da tensão de alimentação e da tensão induzida no rotor, da
seguinte forma:
120
− Em que nr é a velocidade do rotor e fr é a frequência da tensão induzida
no rotor, em Hz.
2.5.
ESCORREGAMENTO
A diferença relativa entre a velocidade do rotor e a velocidade síncrona em
um motor de indução é expressa através de um parâmetro chamado
escorregamento, símbolo s, definido da seguinte maneira:
− %
Por ser uma grandeza adimensional e menor que um, o escorregamento
é expresso normalmente em porcentagem.
Para compreender melhor o significado do escorregamento, considere,
por exemplo, um motor de indução trifásico de 4 polos sendo alimentado por
uma rede de 60 Hz. A velocidade do campo girante (síncrona) desse motor é:
120.60
1800
4
Se a velocidade do rotor do motor em vazio (sem carga) é 1780 rpm, o
escorregamento nessa situação será:
1800 − 1780
1,1%
1800
Por outro lado, se a velocidade do motor quando em plena carga
(nominal) é 1200 rpm, então o escorregamento será:
1800 − 1200
2,5%
1800
Como se observa, o escorregamento vai aumentando à medida que a carga
mecânica exigida do motor aumenta, pois o rotor vai se atrasando para permitir
uma maior indução e aumentar o torque.
2.6.
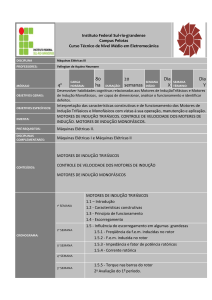
CURVA TORQUE-ESCORREGAMENTO
A curva torque versus escorregamento, em regime permanente, de um
motor de indução típico é mostrada na figura abaixo:
Note, antes de tudo, que o escorregamento s é plotado do maior valor (100
%) para o menor valor (0 %), correspondendo aos valores de velocidade do
rotor nula (motor parado) e igual à velocidade síncrona (impossível),
respectivamente. O valor de torque nominal, Tn corresponde ao ponto de
operação normal para o qual o motor foi projetado, sendo que o respectivo
escorregamento é o escorregamento nominal. Geralmente, os motores de
indução operam em velocidades próximas à velocidade síncrona, vale dizer,
com escorregamentos bem pequenos. Outros pontos notáveis na curva são: Tp
- torque de partida (deve ser maior que o torque de carga nominal, senão o
motor não parte; Tmax e Tmin) - torque máximo e mínimo, respectivamente.
2.7.
VANTAGENS E DESVANTAGENS
Este tipo de motor se apresenta como uma boa opção para acionamentos
controlados, pois possui vantagens sobre o motor de corrente contínua (CC),
pois não existe o comutador. Há inúmeras vantagens neste tipo de motor,
pode-se citar:
•
Limpeza e simplicidade de comando;
•
Construção simples e custo reduzido;
•
Grande versatilidade de adaptação às cargas dos mais diversos tipos
•
Menor que o motor de CC de mesma potência;
•
A manutenção simples e menos onerosa;
•
O consumo de energia nos processos de aceleração e frenagem é
menor;
•
Pode obter velocidades maiores, o que implica em potências maiores.
Simplificando, normalmente o motor de indução trifásico opera com uma
velocidade constante que varia ligeiramente com a carga mecânica aplicada ao
eixo, devido a sua simplicidade e robustez é um motor muito utilizado e
adequado para quase todos os tipos de máquinas acionadas.
E quando se compara os motores com rotor de gaiola e rotor bobinado, se
vê que os motores com rotor de gaiola resultam em uma construção do
induzido mais rápida, mais prática e mais barata.
Trata-se de um motor robusto, barato, de rápida produção, não exigindo
coletor, reduzindo, portanto a quantidade de componentes no motor e
consequentemente simplificando sua manutenção, além de se ser uma
máquina de rápida ligação à rede.
Porém, quando se fala em desvantagem, essa por sua vez reside na
dependência entre fluxo e a tensão do estator, o que não ocorre nos motores
de corrente continua (CC) com excitação independente. Este fato limita a faixa
de variação de velocidade do motor, quando controlado por variação da tensão
do estator. Porém, como houve uma evolução em sistemas eletrônicos que
permitem o controle do motor por variação simultânea da tensão e frequência
do estator, esta desvantagem acaba desaparecendo.
3. CONCLUSÃO
Todo motor elétrico converte energia elétrica em energia mecânica. O
processo de conversão de energia dos motores de indução baseia-se na lei de
indução de Faraday e na lei de Lenz, daí derivando seu nome. Um motor de
indução é um motor elétrico que funciona somente em corrente alternada assim como os transformadores - o que ficará claro quando se estudar o seu
princípio de funcionamento. O motor de indução é o tipo de motor elétrico mais
utilizado em geral, sendo largamente usado em instalações industriais devido à
sua
simplicidade,
robustez,
durabilidade
e
pequena
necessidade
de
manutenção. Normalmente, cerca de 60 % da carga de uma instalação
industrial é constituída por motores de indução, enquanto que, considerando a
carga total em regiões industrializadas, os motores de indução são
responsáveis por cerca de 40 % dessa carga. Por essa razão, os motores de
indução são também chamados motores industriais.