UNIVERSIDADE TÉCNICA DE LISBOA
INSTITUTO SUPERIOR TÉCNICO
DEEC / Secção de Energia
Energias Renováveis e Produção Descentralizada
EQUIPAMENTO ELÉCTRICO DOS GERADORES
EÓLICOS
1ª Parte – Princípio de funcionamento
J.M. Ferreira de Jesus
Rui M.G. Castro
Março de 2004 (edição 0)
ÍNDICE
1. INTRODUÇÃO
3
2. MÁQUINA DE INDUÇÃO COM ROTOR EM GAIOLA
7
3. MÁQUINA DE INDUÇÃO DUPLAMENTE ALIMENTADA
10
4. MÁQUINA SÍNCRONA DE VELOCIDADE VARIÁVEL
17
5. BIBLIOGRAFIA
20
ii
3
Introdução
1. INTRODUÇÃO
Os primeiros Geradores Eólicos (GEOL) que se instalaram em Portugal (no final
dos anos 80, início dos anos 90) encontravam-se equipados com máquinas de indução
de rotor em gaiola. A diferença entre os diversos sistemas residia na forma como a
turbina controlava a potência mecânica: turbinas em que o controlo da potência
mecânica é conseguido através do desenho das pás do rotor, denominadas turbinas
tipo “stall” na literatura, e turbinas em que o controlo da potência mecânica é realizado
por variação do passo das pás do rotor, denominadas turbinas tipo “pitch”. Estes GEOL
caracterizavam-se por possuírem uma velocidade de rotação praticamente constante
(sendo as variações da velocidade de rotação contabilizadas pelo escorregamento) e
por possuírem caixas de velocidade para adaptação da velocidade de rotação nominal
da turbina (cerca de 38 rpm) à velocidade de sincronismo da máquina de indução
(tipicamente 1500 rpm).
No final da década de 90 foram instalados, em Portugal, os primeiros GEOL
equipados
com
máquinas
síncronas,
operadas
a
velocidade
variável.
Estes
caracterizam-se pela ausência de caixa de velocidades, sendo a adaptação da
frequência das grandezas eléctricas do gerador à frequência da rede, realizada através
de um sistema de conversão corrente alternada / corrente contínua / corrente alternada
(ca/cc/ca). As turbinas que equipam estes GEOL são do tipo “pitch”.
No final da década de 90, são ainda instalados em Portugal GEOL equipados com
máquinas de indução de rotor bobinado, em que existe a possibilidade de variar uma
resistência colocada em série com o rotor da máquina e, consequentemente, a gama
de variação de velocidade do rotor. As turbinas que equipam estes GEOL são do tipo
“pitch”, sendo a adaptação da velocidade do rotor da turbina ao rotor da máquina de
indução realizada através de uma caixa de velocidades.
Actualmente encontram-se em instalação em Portugal GEOL equipados com
máquinas de indução de rotor bobinado com aproveitamento da energia do
escorregamento, uma montagem designada na literatura por máquina de indução de
4
Introdução
dupla alimentação1. Estes GEOL são equipados com turbinas do tipo “pitch” e possuem
uma caixa de velocidades por forma a adaptar a velocidade da turbina à velocidade de
rotação da máquina de indução.
Os diferentes tipos de tecnologia que, ao longo do tempo, têm sido instalados em
Portugal, reflectem a evolução tecnológica que se tem verificado nos GEOL ao longo
dos anos.
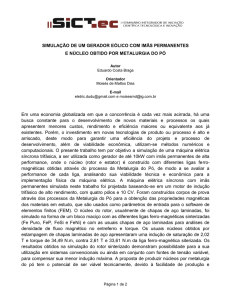
A Figura 1 ilustra os diferentes tipo de configuração possíveis para os GEOL.
Tanto quanto é do conhecimento dos autores, das configurações ilustradas, apenas a
correspondente à utilização da máquina de indução de rotor em gaiola ligada à rede de
energia eléctrica através de um sistema de conversão ca/cc/ca, não é oferecida pelos
fabricantes de GEOL.
Figura 1 – Configurações dos GEOL. [Cigrè].
1
Em inglês estas máquinas designam-se por DFIG – Double Fed Induction Generator ou DOIG – Double
Output Induction Generators.
5
Introdução
As turbinas que equipam as configurações ilustradas na Figura 1 podem ser quer
do tipo “pitch” quer do tipo “stall”, contudo, nas configurações equipadas com sistemas
de conversão ca/cc/ca para interligação com a rede de energia eléctrica, as turbinas
são geralmente do tipo “pitch”.
Dados disponibilizados pelo INEGI2 com data de Março de 2003, que se
apresentam no Quadro 1, permitem quantificar a potência instalada e em construção
em Portugal Continental por tipo de GEOL.
Quadro 1 – Potência instalada em operação/construção
por tipo de configuração dos GEOL em Março de 2003.
Tipo Turbina
Tipo Gerador
Stall
Indução, Gaiola de Esquilo
Indução, Gaiola de Esquilo
Indução, Duplamente alimentado
Síncrono
Pitch
Ligação à Rede
P instalado [MW]
P construção [MW]
Directa
39,4
38,1
Directa
36,7
-
Sistema de conversão ca/cc/ca (rotor)
7,85
21
Sistema de conversão ca/cc/ca
100,5
6
Os dados constantes no Quadro 1 reflectem uma tendência que se vem
verificando por parte dos fabricantes que ofereciam sistemas baseados em máquinas
de indução de rotor em gaiola com turbinas de tipo “pitch”, que consiste em, para a
gama de potências actualmente disponibilizadas nos GEOL (2-3 MW), passarem a
oferecer máquinas de indução duplamente alimentadas. Idêntica filosofia pode ser
observada nos fabricantes que oferecem turbinas de tipo “stall” acopladas a máquinas
de indução de rotor em gaiola: na gama dos GEOL com potência nominal de
2-3 MW começam a oferecer turbinas do tipo “pitch” acopladas a máquinas de indução
duplamente alimentadas.
É assim expectável que a penetração de GEOL equipados com turbinas do tipo
“pitch” e máquinas de indução duplamente alimentadas aumente consideravelmente
num futuro próximo.
2
Instituto Nacional de Engenharia e Gestão Industrial, ligado à Faculdade de Engenharia da
Universidade do Porto.
Introdução
6
No horizonte temporal de 2010, é expectável que em Portugal Continental os
parque eólicos sejam predominantemente equipados com GEOL de três tipos a saber:
•
Turbinas tipo “stall” com geradores de indução de rotor em gaiola.
•
Turbinas tipo “pitch” com geradores síncronos de velocidade variável ligados
à rede de energia eléctrica através de conversores ca/cc/ca.
•
Turbinas tipo “pitch” com geradores de indução duplamente alimentados,
com o estator directamente ligado à rede de energia eléctrica e o rotor ligado
à rede de energia eléctrica através de conversores ca/cc/ca.
Neste documento descrevem-se os tipos de GEOL que, previsivelmente, estarão
instalados em Portugal até 2010.
A caracterização dos GEOL é realizada separadamente para a máquina de
indução com rotor em gaiola (MIRG), para a máquina de indução duplamente
alimentada (MIDA) e para a máquina síncrona de velocidade variável (MSVV).
7
Máquina de Indução com Rotor em Gaiola
2. MÁQUINA DE INDUÇÃO COM ROTOR EM GAIOLA
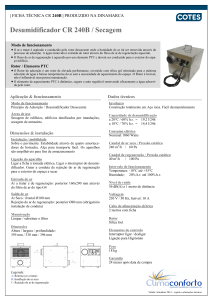
A máquina de indução com o rotor em gaiola (MIRG) funciona como gerador nas
situações em que a velocidade angular do rotor é superior à velocidade angular do
campo girante, ou seja, para escorregamentos, s, negativos, conforme ilustrado na
Figura 2.
60
Tmec [Nm]
40
20
0
-1,5
-1
-0,5
0
0,5
1
s 1,5
-20
-40
-60
-80
Figura 2 – Característica binário–velocidade da máquina de indução de rotor em gaiola.
No modo de funcionamento como gerador a máquina funciona entre os pontos
correspondentes ao escorregamento (aproximadamente) nulo e o correspondente ao
valor máximo da intensidade de corrente admissível no estator, o qual, para a máquina
a que corresponde a característica representada na Figura 2, se verifica para um valor
de s igual a -0.8%. Este valor é consideravelmente inferior àquele para o qual ocorre o
binário máximo (cerca de -8% para a característica representada na Figura 2). Em
virtude da variação da velocidade admissível da máquina em relação à velocidade de
sincronismo ser muito pequena, na prática, esta máquina comporta-se como tendo
velocidade constante.
8
Máquina de Indução com Rotor em Gaiola
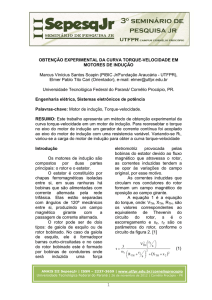
A Figura 3 ilustra a potência reactiva consumida pela máquina de indução em
função da potência activa gerada.
-200
-220
Q [kvar]
-240
-260
-280
-300
-320
0
100
200
300
400
500
600
700
P [kW]
Figura 3 – Potência reactiva, Q, consumida em função da potência activa gerada, P.
Na MIRG, o campo electromagnético, essencial para a conversão de energia
mecânica em energia eléctrica, é estabelecido através do estator da máquina. Tal facto
implica que a máquina absorve sempre potência reactiva da rede, conforme ilustrado na
Figura 3. Note-se a escala negativa no eixo dos y, para ilustrar a absorção de potência
reactiva, na convenção gerador.
O factor de potência da máquina aumenta com o aumento da potência activa
gerada, sendo esta variação não linear, conforme ilustrado nesta figura. Para a
máquina com a característica ilustrada na Figura 3, o factor de potência varia entre 0,18
e 0,91 (capacitivo) para valores da potência activa entre 40 kW e 660 kW,
respectivamente.
Máquina de Indução com Rotor em Gaiola
9
Os GEOL equipados com MIRG são sempre equipados com baterias de
condensadores por forma a compensar o factor de potência das máquinas. Os
fabricantes compensam, geralmente, o factor de potência para o valor unitário, por meio
de bancos de condensadores, tipicamente com dois escalões.
Alguns fabricantes oferecem MIRG com um número variável de pares de pólos
(tipicamente 2-3): o número a usar depende da velocidade da turbina. Esta solução
permite adaptar a velocidade específica da ponta da pá, λ, a um valor que maximize o
coeficiente de potência, Cp.
10
Máquina de Indução Duplamente Alimentada
3. MÁQUINA DE INDUÇÃO DUPLAMENTE ALIMENTADA
O principio de funcionamento da máquina de indução (com rotor bobinado)
duplamente alimentada (MIDA) baseia-se na possibilidade de controlar a sua
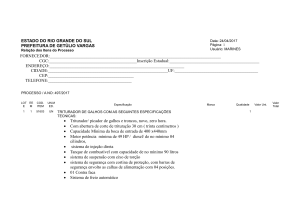
velocidade por variação da resistência do rotor. A Figura 4 ilustra a alteração das
curvas binário / escorregamento da máquina de indução devido à variação de uma
resistência ligada em série com a do enrolamento do rotor.
Rr1
Rr2
Rr3
Rr4
Tmec
60
T [Nm]
40
20
0
-1
-0,8
-0,6
-0,4
-0,2
0
0,2
0,4
0,6
0,8
1
s [pu]
-20
-40
-60
-80
Figura 4 – Curvas características binário - velocidade para diferentes valores de
resistência do rotor: Rr4 > Rr3 > Rr2 > Rr1
Na Figura 4 observa-se que, para um dado binário mecânico, T, é possível variar a
velocidade da máquina de indução variando a resistência rotórica. Se em lugar de uma
resistência variável, se instalar um sistema de conversão ca/cc/ca ligado ao rotor, é
possível extrair potência activa pelo rotor da máquina e assim controlar a velocidade. É
este o princípio do aproveitamento da energia de escorregamento nos motores de
indução de rotor bobinado.
11
Máquina de Indução Duplamente Alimentada
O modo de funcionamento das MIDA utilizadas nos GEOL baseia-se no princípio
acima descrito: para escorregamentos negativos, até se atingir a intensidade de
corrente nominal do estator da máquina, a potência extraída pelo rotor da máquina é
controlada por forma a optimizar a velocidade específica da ponta da pá do rotor, λ, e
assim maximizar o valor do coeficiente de potência, Cp, da turbina.
Para escorregamentos negativos, superiores (em módulo) àquele em que a
intensidade da corrente no estator atinge o valor nominal, a potência activa no estator e
rotor permanecem constantes.
Este princípio do controlo da velocidade por aproveitamento da energia de
escorregamento, leva a que esta máquina possa funcionar como gerador para
escorregamentos positivos. Por forma a garantir este modo de operação, torna-se
necessário fornecer potência activa ao rotor.
A Figura 5 ilustra a característica Cp(v) para turbinas de velocidade fixa (v f) e de
velocidade variável (v v).
vv
vf
0,5
0,45
0,4
0,35
Cp
0,3
0,25
0,2
0,15
0,1
0,05
0
0
5
10
15
20
25
30
v [m/s]
Figura 5 – Característica Cp(v) para turbinas de velocidade fixa (v f) e de velocidade variável (v v).
12
Máquina de Indução Duplamente Alimentada
Para a mesma velocidade do vento incidente, as turbinas apresentam as
características Pmec(v) representadas na Figura 6.
vv
vf
800
700
600
Pmec [kW]
500
400
300
200
100
0
0
5
10
15
20
25
v [m/s]
Figura 6 – Características Pmec (v) para turbinas de velocidade variável (vv)
e explorada a velocidade fixa (vf).
A Figura 5 e a Figura 6 ilustram as vantagens de explorar uma turbina a
velocidade variável: a potência mecânica disponível para conversão em potência
eléctrica é claramente superior, quer na zona das mais baixas quer na das mais
elevadas velocidades de vento.
A Figura 7 ilustra a velocidade do rotor de uma máquina de indução com dois
pares de pólos acoplada a uma turbina eólica operada a velocidade fixa ou variável.
Da Figura 7 conclui-se que, para a máquina ser operada a velocidade variável e
assim optimizar o valor de Cp da turbina, necessita funcionar como gerador para
velocidades abaixo da velocidade de sincronismo (1500 rpm neste caso).
13
Máquina de Indução Duplamente Alimentada
v v
vf
1650
1600
1550
Nr [rpm]
1500
1450
1400
1350
1300
1250
1200
5
7
9
11
13
15
17
19
21
23
25
v [m/s]
Figura 7 – Velocidade do rotor em função da velocidade do vento de uma máquina de indução com
2 pares de pólos num sistema operado a velocidade fixa (v f) ou a velocidade variável (v v).
A Figura 8 ilustra as potências activas no estator, Ps(vv), no rotor, Pr, e total Pt(vv)
(=Ps-Pr) de uma MIDA que equipa o GEOL explorado a velocidade variável e a potência
activa no estator, Ps(vf), da MIRG de velocidade constante.
A análise da Figura 8 permite a identificação de três zonas na característica
potência – velocidade de rotação da MIDA: uma zona abaixo da velocidade de
sincronismo em que é fornecida potência activa ao rotor da máquina; uma zona próximo
da velocidade de sincronismo em que o trânsito de potência activa no rotor da máquina
é praticamente nulo; uma zona, a partir de cerca de 1512 rpm, em que a máquina
fornece potência activa à rede pelo estator e pelo rotor. Estas zonas que se observam
na
Figura
8
comercializados.
são
típicas
nos
GEOL
equipados
com
MIDA
correntemente
14
Máquina de Indução Duplamente Alimentada
Ps (v v)
Pr
Ps (v f)
Pt (v v)
1450
1500
650
550
450
P [kW]
350
250
150
50
1200
-50
1250
1300
1350
1400
1550
1600
1650
Nr [rpm]
Figura 8 – Potências activas das MIRG (v f) e MIDA (v v) em função da velocidade do rotor.
Na Figura 9 apresenta-se o esquema de ligações da máquina de indução
duplamente alimentada.
Figura 9 – Esquema de ligações da máquina de indução duplamente alimentada [Ekanayake].
O estator da máquina de indução encontra-se directamente ligado à rede de
energia eléctrica; o rotor está ligado à rede através de um sistema de conversão
ca/cc/ca e de um transformador elevador.
Máquina de Indução Duplamente Alimentada
15
Os conversores ca/cc/ca que interligam o rotor da máquina à rede, através do
transformador elevador, são pontes conversoras a seis pulsos equipados com
transistores bipolares de porta isolada (IGBT’s) com um sistema de comando por
modulação da largura do impulso. Tipicamente, nos GEOL equipados com MIDA, o
conversor ligado ao transformador elevador controla a tensão contínua aos terminais do
condensador do subsistema de corrente contínua e controla o factor de potência no
ponto comum aos circuitos do rotor e estator. O conversor directamente ligado ao rotor
da máquina de indução controla o módulo e argumento da intensidade de corrente
injectada / extraída pelo circuito rotórico.
O princípio de funcionamento do sistema de controlo por modulação da largura de
impulso dos conversores permite impor uma forma de onda alternada sinusoidal com
frequência, amplitude e fase ajustáveis aos terminais de corrente alternada dos
conversores [Mohan].
No caso que ora se apresenta, o conversor ca/cc ligado ao rotor da máquina de
indução, permite o controlo da frequência da forma de onda aplicada ao rotor (igual à
frequência de escorregamento da máquina num dado ponto de operação) e,
simultaneamente, o controlo do módulo e argumento da intensidade de corrente no
rotor. No conversor ca/cc ligado ao transformador elevador, é controlada a amplitude da
tensão contínua aos terminais do condensador, a frequência da onda de corrente
alternada é igual á frequência da rede com que o conversor se encontra interligado e o
controlo de fase permite impor o factor de potência.
Esta propriedade do sistema de comando por modulação da largura do impulso de
ajustar a fase da onda de tensão/intensidade de corrente, permite dispensar a utilização
de baterias de condensadores na grande maioria dos casos. Tipicamente, os
fabricantes asseguram um controlo do factor de potência entre cerca de 0,9 indutivo e
cerca de 0,9 capacitivo aos terminais da máquina.
Máquina de Indução Duplamente Alimentada
16
O sistema de controlo dos conversores ca/cc/ca visa assegurar a maximização do
valor do coeficiente de potência, Cp, da turbina, na região da característica P(v) em que
a potência não é controlada. Adicionalmente, o sistema de controlo destes conversores
mantém um dado valor do factor de potência no ponto de interligação da MIDA com a
rede de energia eléctrica.
Na região de potência controlada da característica P(v) da turbina, o controlador
do sistema de conversão ca/cc/ca mantém constante a potência total, Pt, extraída pelo
estator e rotor da máquina, sendo complementado pelo sistema de controlo do ângulo
de passo das pás do rotor.
Do exposto conclui-se que o sistema de controlo dos GEOL equipados com MIDA
visa maximizar a potência eléctrica entregue à rede na gama de variação da velocidade
do vento.
Máquina Síncrona de Velocidade Variável
17
4. MÁQUINA SÍNCRONA DE VELOCIDADE VARIÁVEL
A Figura 10 ilustra o esquema de ligações dos geradores eólicos equipados com
máquinas síncronas de velocidade variável (MSVV).
Figura 10 – Esquema de Ligações de um GEOL equipado com um
gerador síncrono explorado a velocidade variável.
Nestes sistemas a máquina síncrona encontra-se ligada à rede através de um
sistema de conversão ca/cc/ca, já que a frequência das grandezas estatóricas (idêntica
à frequência angular de rotação do rotor) é diferente da frequência da rede de energia
eléctrica.
Os GEOL deste tipo instalados em Portugal, não possuem caixa de velocidades,
pelo que a velocidade mecânica de rotação do rotor é idêntica à velocidade de rotação
da turbina. Tipicamente a velocidade de rotação da turbina (e do rotor da máquina
síncrona) varia entre 17 rpm e 36 rpm, pelo que a máquina possui um número de pares
de pólos elevado (32 nalgumas das instalações existentes).
Máquina Síncrona de Velocidade Variável
18
O estator da máquina síncrona é hexafásico e encontra-se ligado a dois sistemas
de conversão ca/cc/ca independentes. O paralelo entre os dois sistemas de conversão
é efectuado à saída dos conversores cc/ca (conversores de rede) que se encontram
ligados ao transformador elevador.
Cada um dos conversores ca/cc ligados ao gerador (conversores de gerador) é
constituído por uma ponte conversora a seis pulsos equipadas com tiristores. Estes
tiristores funcionam com um ângulo de disparo constante.
A tensão contínua aos terminais do condensador colocado em paralelo na ligação
em corrente contínua tem de ser regulada para um valor constante. Contudo, para
valores baixos da velocidade do rotor, o sistema de excitação da máquina síncrona não
tem capacidade para assegurar aquele valor, sendo necessário recorrer a um “chopper”
(conversor cc/cc) instalado entre o conversor do gerador e o condensador, o qual é
desligado quando a velocidade do rotor excede um determinado valor.
O conversor de rede é constituído por uma ponte conversora a seis pulsos
equipada com IGBT’s, com um sistema de comando por modulação da largura do
impulso. Este conversor controla a potência activa injectada na rede e o factor de
potência. O controlo de potência activa no conversor de rede permite a imposição de
um binário electromagnético (resistente) ao gerador, tornando assim possível o controlo
da velocidade de rotação do grupo turbina eólica – gerador, por forma a obter a
velocidade específica da ponta da pá óptima, λ, para cada valor da velocidade de
vento.
A Figura 11 ilustra a potência activa e reactiva fornecida pelo conversor de rede de
um GEOL deste tipo em função da velocidade de rotação do rotor.
19
Máquina Síncrona de Velocidade Variável
P
Q
700
600
P; Q [kW/kVar]
500
400
300
200
100
0
16
18
20
22
24
26
28
30
32
34
36
Nr [rpm]
Figura 11 – Potência activa e reactiva fornecida por um GEOL equipado com gerador síncrono
explorado a velocidade variável em função da velocidade do rotor.
20
Bibliografia
5. BIBLIOGRAFIA
[Akhmatov]
Akhmatov; “Variable-Speed Wind Turbines with Doubly-Fed Induction Generators
– Part I: Modelling in Dynamic Simulation Tools”, Wind Engineering, Vol 26, nº 2,
2002.
[Cigrè]
CIGRÉ Task Force 38.01.10, 2001.
[Ekanayake]
Ekanayake; Holdsworth; Wu; Jenkins; “Dynamic Modelling of Doubly Fed
Induction Generator Wind Turbines”, IEEE Transactions on Power Systems,
vol.18, nº 2, May 2003.
[Manwell]
Manwell; McGowan; Rogers; “Wind Energy Explained”, John Wiley & Sons, 2002.
[Mohan]
Mohan; Undeland; Robbins; “Power Electronics – Converters, Applications and
Design”, John Wiley & Sons, 2003.