Motores de Corrente Contínua:
I
F
I
RF
RA
I
L
+
+
VF
A
+
EA
NF
Vt
−
−
−
ω mec
T ele
T mec
CARGA
Máquina CC operando como MOTOR:
1. Inicialmente a máquina se encontra em repouso (ωm = 0);
2. Alimenta-se o circuito de campo da máquina (φ 6= 0);
3. Alimenta-se o circuito de armadura a partir de uma fonte de tensão independente:
Ia =
Vt
Ra
– p. 1/2
4. Cada condutor
da armadura é percorrido
por i = Iaa ⇒ Find = iBl ;
5. O torque induzido em cada condutor é calculado por:
r
τ = Find r sin θ
Find
l
6. O torque induzido nos condutores faz a armadura entrar em movimento (ωm > 0).
τind = kt φIa
onde kt =
Find
θ
r
Find cos θ
Zp
2πa
7. A força contra-eletromotriz induzida na armadura (Ea = ke φωm ) limita a corrente
da máquina:
Ia =
Vt − Ea
Ra
– p. 2/2
Tipos de motores CC:
1. Motor CC com excitação independente
2. Motor CC Shunt (em Derivação )
3. Motor CC Série
4. Motor CC Composto
Aditivo ou cumulativo (curto ou longo)
Subtrativo ou diferencial (curto ou longo)
5. Motor CC de Ímãs permanentes
6. Motor CC sem escovas (Brushless DC Motor )
– p. 3/2
Motor CC com excitação independente:
R aj
F
I
∆ V esc
A
−
+
RA
RI
RC
I
L
+
+
RF
+
VF
EA
NF
Vt
−
−
FONTE
I
−
Circuito de campo:
V
=
R
+
R
aj
f If
f
F mm = Nf If
Circuito de armadura:
Ia = IL
V = E + (R + R + R ) I + ∆V
t
a
a
c a
esc
i
Ea = ke φωm
τ
ele = kt φIa
– p. 4/2
Motor CC Shunt:
I
∆ V esc
A
−
+
RA
I
RI
L
(RF + Raj )
EA
−
NF
I
Vt
F
FONTE
+
+
−
Circuito de campo:
V
=
V
=
R
+
R
t
aj
f
f If
F mm = Nf If
Circuito de armadura:
Ia = IL − If
V = E + (R + R ) I + ∆V
t
a
a
esc
i a
Ea = ke φωm
τ
ele = kt φIa
– p. 5/2
Característica terminal do Motor Shunt:
Desprezando as perdas no motor CC
tem-se que:
ωm
Ra
(k φ) 2
VT
kφ
τele = τcarga + τperdas ≈ τcarga
Desprezando as quedas de tensão
nas escovas e no enrolamento de
interpólo tem-se:
τele = kt φIa
Vt = Ea + Ra Ia
(1)
Ea = ke φωm
τ
→ Ia = ele
kt
(2)
τ
ωm
ele
(3)
Substituindo (3) e (2) em (1) tem-se:
Vt
Ra
=
−
τ
2 ele
kφ
(kφ)
τ
carga
ρω (%) =
ωvazio − ωplena carga
ωplena carga
100
onde ω é constante.
– p. 6/2
A REAÇÃO DA ARMADURA enfraquece o fluxo polar;
O enfraquecimento de φ diminui a amplitude da tensão induzida Ea forçando o
aumento da corrente Ia , do torque τele e conseqüentemente da velocidade do motor
ωm
VT
kφ
Ra
(k φ) 2
Com RA
Sem RA
τ
carga
τ
ele
– p. 7/2
Controle de velocidade de Motores Shunt
Da observação de
Vt
Ra
τele
ωm =
−
2
kφ (kφ)
pode-se derivar três estratégias de controle para o
motor CC.
1. Variação do fluxo magnético (φ) produzido no campo através do ajuste da
resistência (Raj );
2. Variação da tensão de alimentação da armadura (Va );
3. Conexão de uma resistência adicional em série com o circuito da armadura
(Rad );
– p. 8/2
Variação do fluxo magnético (φ):
ωm
ω m2
I
I
A
L
+
RA
ω m1
RF
+
Vt
EA
−
R F2 > R F1
NF
I
F
R F2
−
R F1
τ
carga
τ
ele
– p. 9/2
Variação da tensão de armadura (Va):
ωm
I
I
A
VA1
L
VA2
RA
+
EA
−
CONVERSOR
CC−CC
+
VA
RF
Vt
NF
I
F
−
VA3
kφ
Ra
(k φ) 2
kφ
kφ
VA4
kφ
τ
carga
τ
ele
– p. 10/2
Variação da resistência de armadura (Rad)
ωm
I
A
I
R ad
L
+
RA
ωm
RF
R a < R a1< R a2 < R a3
+
Vt
EA
−
NF
I
F
−
Ra
R a1
R a2
τ
carga
R a3
τ
ele
– p. 11/2
Motor CC série:
RA
I
NS
RS
A
I
L
+
+
I
S
Vt
EA
−
−
Circuito de campo:
Circuito de armadura:
Ia = IL = Is
V = E + (R + R ) I
t
a
a
s a
Ea = ke φs ωm
τ
ele = kt φIa
φs ∝ Ia → φs = k1 Ia
τele = kt φs Ia = kt (k1 Ia ) Ia
τele = kt′ Ia2
– p. 12/2
Característica terminal do Motor Série:
Como ke = kt = k no SI tem-se:
τele = k′ Ia2
→
Ia =
r
ωm
τele
k′
e,
Ea = kφωm
ω m1
Substituindo as expressões acima em
Vt = Ea + (Ra + Rs ) Ia tem-se:
τ
Vt
= kφωm + (Ra + Rs )
q
τele
k′ q
= k (k1 Ia ) ωm + (Ra + Rs )
Reescrevendo a equação anterior
explicitando ωm tem-se:
ωm =
Vt
Ra + Rs
−
√
k′ τele
k′
τ
ele1
part
τ
ele
τele
k′
para ωm = 0,
τpart =
k′
Vt
Ra +Rs
2
– p. 13/2
Partida de motores cc
A corrente dos motores CC durante a partida é limitada
apenas pela resistência da armadura Ra .
I
I
A
Ea = kφω = 0
L
⇓
+
RA
RF
+
Vt
EA
−
NF
I
F
−
Vt − E a
Ia =
Ra
⇓
Na partida ω = 0, logo
Vt
Ia =
Ra
A corrente de partida dos motores CC pode chegar até
a 30 x Ianominal
– p. 14/2
A medida que o motor acelera a tensão Ea cresce
forçando a corrente Ia diminuir.
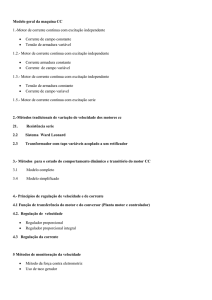
Exemplo:
Motor CC independente
Partida de motor CC 5HP/240V
400
Ia [A]
~ 328 A
16,2 A
200
0
−200
0
1
2
3
4
5
6
7
8
9
10
Torque [Nm]
600
400
29,25 Nm
200
f
0
−200
0
1
2
3
4
5
6
7
8
9
10
Para este motor
ω [rpm]
1500
1000
X: 8.832
Y: 1221
Ia =
1221 rpm
500
0
5HP/240V
I
anominal = 16, 2A
Ra = 0, 73Ω
R = 240Ω
0
1
2
3
4
5
Tempo [s]
6
7
8
9
Vt
240V
≈ 330A
=
Ra
0, 73
10
– p. 15/2
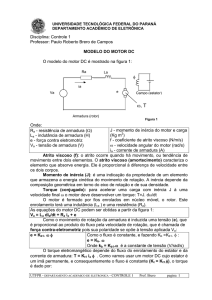
Para limitar a corrente de partida podemos projetar um
resistor Rp para ser inserido em série com a armadura.
I
Ap
I
Rp
Como exemplo suponha que
deseja-se uma corrente de
partida ser menor que 210 % da
nominal
Lp
Iap ≤ 210%Ianominal = 34A
+
RA
RF
+
Vt
EA
−
NF
I
Iap =
F
−
Rp ≥
Vt
≤ 34A
Ra + Rp
240V
− 0, 73Ω = 6, 33Ω
34A
Desvantagens:
Perdas elevadas;
Corrente e velocidade não
atingem o valor nominal
– p. 16/2
Ia [A]
40
20
0
−20
11,72 A
0
1
2
3
4
5
6
7
8
9
10
Torque [Nm]
100
21.21 Nm
50
0
−50
0
1
2
3
4
5
6
7
8
9
10
9
10
ω [rpm]
1000
500
862 rpm
0
0
1
2
3
4
5
Tempo [s]
6
7
8
– p. 17/2
Para resolver o problema anterior pode-se colocar uma
chave em paralelo com o resistor Rp .
Essa chave Sw é fechada depois de um tempo e
fornece um caminho para a corrente da armadura.
Sw
I
I
Ap
Lp
+
Rp
RA
RF
+
Vt
EA
−
NF
I
F
Contudo depois que a chave Sw
é fechada como a velocidade e
a tensão Ea não são nominais
a corrente de armadura sofre um
outro pico (que geralmente é elevado também)
−
– p. 18/2
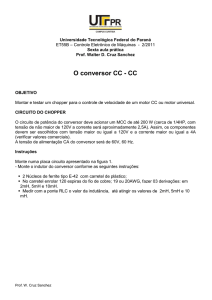
Contudo o resistor Rp pode ser dividido em n estágios
os quais são retirados a medida que o motor acelera.
Partida de motor CC 5HP/240V com banco de resistores
Ia [A]
40
S3
20
°
2 estágio
saída do 1° estágio
0
−20
0
2
4
6
S2
S1
3° estágio
I
8
Torque [Nm]
100
+
50
R3
RA
0
−50
Ap
10
R2
R1
+
0
2
4
6
8
10
Vt
ω [rpm]
1500
EA
1000
500
0
−
0
2
4
6
8
10
−
Tempo [s]
– p. 19/2
Metodologia de cálculo dos resistores:
1. Projeta-se o resistor Rp para que a corrente de partida ou o torque não sejam
superior a um valor máximo especificado pelo projeto
Iap ≤ Iamáx
ou,
τp ≤ τmáx
2. O resistor Rp é então divido em n-estágios
Rp = R1 + R2 + R3 + . . . + Rp
3. Considerando que a resistência Rp = R1 + R2 + R3 + . . . + Rn está totalmente
inserida no circuito de armadura tem-se que a corrente de partida é menor que Iamáx
e pode-se escrever a seguinte equação:
Vt
= Ea + Ra Iamáx + (R1 + R2 + R3 + . . . + Rn ) Iamáx + ∆Vesc
= Ea + (R1 + R2 + R3 + . . . + Rn + Ra ) Iamáx + ∆Vesc
Vt = Ea + Rtot Iamáx + ∆Vesc
(4)
– p. 20/2
4. A medida que o motor acelera ω a tensão Ea cresce e a corrente Ia diminui. Quando
o valor da corrente da armadura chega a um limite mínimo Iamín pode-se reescrever
(4) como:
Vt = Ea + Rtot Iamín
(5)
5. Neste instante fecha-se a chave S1 . O resistor R1 é retirado do circuito e a corrente
do motor volta a crescer. Contudo a mesma deve ser menor que Iamín . Desse modo,
considerando Rtot,1 = R2 + R3 + . . . + Rn + Ra , tem-se:
Vt = Ea + Rtot,1 Iamáx
(6)
Ea + Rtot Iamín = Ea + Rtot,1 Iamáx
(7)
6. Igualando (5) e (6) tem-se:
Rtot,1 =
Iamín
Iamáx
Rtot
(8)
– p. 21/2
6. Aplicando essa metodologia sucessivamente tem-se que a resistência depois de
retirado o n-ésimo estágio é dada por:
Rtot,n = Ra =
Iamín
Iamáx
n
Rtot
(9)
Ou seja,
n= Ra
Rtot
Ia
mín
Iamáx
7. As resistências de cada estágio podem ser facilmente calculadas resolvendo o
sistema:
R1 + R2 + R3 + . . . + Rn + Ra = Rtot
R2 + R3 + . . . + Rn + Ra = Rtot,1
R3 + . . . + Rn + Ra = Rtot,2
..............................
Ra = Rtot,n
= (Rp + Ra )
(10)
– p. 22/2
Rendimento e perdas nos motores cc:
1. Perdas no COBRE:
(a) na armadura ⇒ Ra Ia2
2
(b) no campo ⇒ Raj + Rf If
2. Perdas no FERRO:
(a) por histerese;
(b) por correntes parasitas (corrente de Foucault)
3. Perdas no MECÂNICAS (atrito e ventilação):
4. Perdas nas ESCOVAS ⇒ ∆Vesc Ia
5. Perdas SUPLEMENTARES ⇒ 1% da potência nominal
do motor.
– p. 23/2
Potência elétrica (de entrada):
Pele = Vt IL
I
A
I
RA
Potência elétrica entregue ao
rotor:
L
Pint = Ea Ia
+
+
τ ele
τ mec
ω
RF
Vt
EA
−
NF
I
Potência mecânica (de saída):
F
Pmec = τmec ω = τele ω
−
Pmec = Ea Ia − Perdas no rotor
Rendimento:
η=
Pmec
τ
ω
×100% = mec ×100%
Pele
Vt IL
– p. 24/2
Ensaios
1. Ensaio a vazio: ⇒ usado para determinar as perdas
rotacionais do motor
Perdas rotacionais = Eavaz Iavaz
2. Ensaio de rotor bloqueado: ⇒ usado para determinar a
resistência da armadura
Vt − ∆Vesc
Ra =
Ianom
– p. 25/2