Curso de Pré Física
UTFPR – CM 2014/01
Monitores:
Gabriel H. S. Parizoto
Aluno de Engenharia Civil – 3º Período
Victoria Lamas
Aluna de Engenharia Civil – 3º Período
Email:
[email protected]
[email protected]
MOVIMENTO DE ROTAÇÃO
POSIÇÃO ANGULAR
• Para descrever a rotação de um corpo rígido em torno de um eixo de rotação,
supomos que uma reta de referência está fixa no corpo, perpendicular ao eixo e
girando com o corpo.
•A Posição Angular do corpo é a medida dessa linha em relação a uma direção fixa.
s
r
• A posição angular é medida em radianos. A relação entre um ângulo em
radianos, um ângulo em revolução e um ângulo em graus é a seguinte:
1rev 360 2rad
DESLOCAMENTO ANGULAR
• O Deslocamento Angular é a variação da posição angular que ocorre em um
corpo que gira em torno de um eixo de rotação.
2 1
• Positivo para rotações no sentido anti-horário.
• Negativo para rotações no sentido horário.
VELOCIDADE ANGULAR
méd
• A Velocidade Angular Média de um corpo que
sofre um deslocamento angular em um
determinado intervalo de tempo é:
méd
t
• A Velocidade Angular Instantânea do corpo é:
d
dt
• Ambas velocidades são grandezas vetoriais, isto é, possuem módulo, direção e
sentido.
•O módulo é dado pela velocidade angular escalar.
•A orientação das velocidades é dada pela regra da mão direita.
REGRA DA MÃO DIREITA
• A orientação das velocidades é dada pela regra da mão direita.
ACELERAÇÃO ANGULAR
• A Aceleração Angular Média de um corpo que tem uma variação de velocidade
em um determinado intervalo de tempo é dada por:
méd
2 1
t 2 t1
t
• A Aceleração Angular Instantânea do corpo é dada por:
d
dt
• Ambas acelerações são grandezas vetoriais, isto é, possuem módulo, direção e
sentido.
EQUAÇÕES ACELERAÇÃO CONSTANTE
A aceleração angular constante é um caso especial do movimento de rotação.
Quando isso ocorre, as equações cinemáticas usadas são:
0 t
1 2
0 0t t
2
0 2 ( 0 )
2
2
ACELERAÇÃO ANGULAR
ACELERAÇÃO ANGULAR
ACELERAÇÃO ANGULAR
As relações entre
variáveis lineares e
angulares são:
s r
v r
at r
Sendo:
s = comprimento do arco de círculo
r = raio da circunferência descrita
v = velocidade linear
T = período
= Posição Angular
= Velocidade Angular
at = Aceleração Tangencial
= Aceleração Angular
ACELERAÇÃO ANGULAR
As relações entre
variáveis lineares e
angulares são:
2r 2
T
v
2
v
2
at
r
r
Sendo:
s = comprimento do arco de círculo
r = raio da circunferência descrita
v = velocidade linear
T = período
= Posição Angular
= Velocidade Angular
at = Aceleração Tangencial
= Aceleração Angular
ACELERAÇÃO ANGULAR
TORQUE
• O torque é a ação de girar ou de torcer um corpo em torno de um eixo de
rotação, produzida por uma força.
•Se a força F é exercida em um ponto dado pelo vetor r em relação ao eixo, o
módulo desse torque é:
𝜏 =𝑟×𝐹
rFt rFsen
• A unidade de torque do SI é o
Newton metro (N m).
• O torque é positivo se tende a girar
um corpo em repouso no sentido antihorário.
• O torque é negativo se tende a girar o
corpo em repouso no sentido horário.
TORQUE
• Eixo de ação
• Linha de ação
• Braço de alavanca
TORQUE
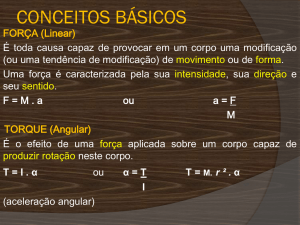
Exemplo:
Sabendo que um objeto sente uma força dada pelo vetor 𝐹 = 2𝑖 + 5𝑗 𝑁,
aplicada a um ponto definido pelo vetor 𝑟 = 1𝑖 − 3𝑗 𝑚, determine:
a) O módulo do Torque produzido pela força.
b) O ângulo entre “r” e “F”
(o vetor r parte do eixo e aponta onde a força está sendo aplicada).
(𝜏 = (11𝑘)𝑁𝑚; 𝜃 = 139,7°)
𝐹
𝑟
𝜃