UNIVERSIDADE FEDERAL DOS ESPÍRITO SANTO – UFES
CENTRO DE CIÊNCIAS HUMANAS E NATURAIS - CCHN
DEPARTAMENTO DE GEOGRAFIA - DPGEO
LABORATÓRIO DE GEOMÁTICA DA UFES - LGU
Capítulo 4
PROF. ALEXANDRE ROSA DOS SANTOS
Engenheiro Agrônomo - UFES
Mestrado em Meteorologia Agrícola – UFV
Doutorado em Engenharia Agrícola - UFV
CAPTURA DE DADOS PARA SIG
SGBD: os procedimentos para aquisição e manipulação do
Sistema de Gerenciamento de Banco de Dados correspondem a
aproximadamente 75% dos esforços físicos, financeiros e
intelectuais de um projeto envolvendo SIG;
QUAIS OS QUATRO TIPOS DE DADOS
QUE FAZEM PARTE DE UM SIG???
TEXTUAIS;
NUMÉRICOS;
VETORIAIS;
MATRICIAIS
OU RASTER;
A, B, C, D....
1,2, 3, 4....
O DADO NUMÉRICO PODE SER
CLASSIFICADO EM:
NOMINAL: corresponde ao atributo que, representando um item específico,
não necessariamente obedece a uma determinada seqüência,
como, por exemplo, tipos de solos ou de árvores de uma
determinada região;
ORDINAL: apresentam-se como listas de classes discretas, com uma certa
ordem inerente, como, por exemplo, as classes de rios (primeira,
segunda, terceira ordem), a classe dos níveis de educação
(primério, secundário, universitário e pós-graduação) ;
INTERCALADO: representa um determinado intervalo natural e que tem
um significado particular, ou seja, a diferença entre 10º C
e 20ºC é a mesma que entre 90ºC e 100ºC.
DIVIDIDO: têm as mesmas características que os dados intercalados,
acrescentado-se que, por definição, eles têm um origem inicial,
que é o ponto zero, por exemplo, renda per capita e precipitação
anual das chuvas;
O SÃO RELAÇÕES TOPOLÓGICAS???
São os detalhes das conexões
entre objetos espaciais, como,
por exemplo, as informações
sobre quais são as áreas
limitadas por segmentos e suas
posições relativas.
QUAL A DIFERENÇA ENTRE DADO
VETORIAL E DADO RASTER ???
VETORIAL
RASTER
EXEMPLO
É a representação
gráfica
dodo
mundo
real
Refere-se
à representação
gráfica
mundo
real por
meio de
sistemas
de coordenadas,
meio por
de pixel
(picture
element)
ou células, com
forma,
a unidade
fundamental
do que
forma dessa
poligonal
regular,
geralmente
quadradas,
dado vetorial
o parposições
de coordenadas
x, às
são definidos
pelasé suas
em relação
colunas e linhasy.de uma malha.
REPRESENTAÇÃO DE DADO VETORIAL (1) E RASTER (2)
Y
(a)
(c)
CAMPO
LINHAS
(b)
X
COLUNAS
TIPOS DE ARQUIVOS RASTER
1,5 -3,4 3,8
5
5
30
8
3
1
10
5
1
1
5
2,3
-3
5
5
4
9
-12,3
5
2,5
9
a) Imagem codificada 2n
b) Imagem contínua
c) Imagem binária
d) Imagem ternária
OS PLANOS DE INFORMAÇÃO (PI) POSSUEM TRÊS
CARACTERÍSTICAS PRINICIPAIS:
RESOLUÇÃO
É a mínima dimensão linear da menor
unidade do espaço geográfico que foi
registrada.
ORIENTAÇÃO
Ângulo ente o Norte verdadeiro e a direção
definida pelas colunas do modelo raster, no
modelo vetorial ao ângulo entre o Norte
verdadeiro e qualquer linha contida no PI.
CONTIGUIDADE
Corresponde às localizações adjacente que
possuem o mesmo atributo. Ex: Curvas de
nível.
O QUE SE ENTENDE POR FORMATO???
Formato é modo como os dados são
organizados para permitir a
sua manipulação.
O formato DXF (Drawing Interchange Files), desenvolvido pela
AutoCad da AutoDesk Inc é dividido em quatro blocos principais:
CABEÇALHO: (header section), que contém as variáveis de configuração
do AutoCad e seus respectivos valores;
TABELAS: (tables section), que contém a definição prévia de todos os
tipos de linhas, estilos de texto e níveis de informação (layers)
a serem referenciados nas seções de blocos e entidades;
BLOCOS: (blocks section), que contém a construção dos blocos que
são entidades gráficas compostas por várias entidades
primitivas utilizados no desenho;
ENTIDADES: (entities section), que correspondem às linhas, arcos,
textos e inserção de blocos que armazenam as
EXEMPLO
informações, via grupos de códigos;
ORGANIZAÇÃO DOS DADOS EM FORMATO DXF. O CÓDIGO DO GRUPO
999 É DESTINADO A COMENTÁRIOS
GRUPO DE
CÓDIGOS
DESCRIÇÃO
GRUPO DE
CÓDIGOS
DESCRIÇÃO
0
Identifica o início de uma entidade,
tabela de entrada, ou separador de
arquivo
21-28
Outras coordenadas Y
1
O valor do texto primário de uma
entidade
30
Coordenada primária Z
2
Um nome; etiqueta de atributo,
nome do bloco etc.
31-37
Outras coordenadas Z
3-4
Outros textos
38
Se não for zero a elevação da
entidade
5
Entidade expressa como um texto
hexadecimal
39
Se não for zero a espessura da
entidade
6
Nome do tipo de linha
40-48
Valores de pontos decimais
7
Nome do estilo de texto
49
Valores repetidos
8
Nome dos níveis de informação
(layer)
50-58
Ângulos
9
Identifica o nome da variável
62
Número da cor
10
Coordenada primária do X (ponto
inicial de uma linha)
66
Outras entidades
11-18
Outras coordenadas X
70-78
Valores inteiros
20
Coordenada primária Y
210,220,230
Componentes X, Y e Z de direção
de extrusão
QUAIS OS PROCESSOS DE CAPTURA DE
DADOS???
DIGITAÇÃO
DIGITALIZAÇÃO
Processo utilizado para captura de
dadosutilizado
que se para
utilizam
do teclado
do por
Processo
captura
de dados
computador
para
acionar
comandos;
meio
do mouse
e mesa
digitalizadora.
CONSIDERAÇÕES SOBRE A DIGITALIZAÇÃO
As dimensões de uma mesa digitalizadora pode variar de 25 x 25 cm
até 200 x 150 cm;
Para iniciar o processo de captura de dados, o mapa é fixado na
mesa digitalizadora e pontos de controle são identificados, tais
como interseção de estradas e pontos geodésicos;
O número de pontos de controle depende da escala do mapa:
quanto maior a escala, menor o número de pontos de controle a ser
coletado;
PONTOS são capturados acionando-se uma vez o mouse; RETAS,
digitalizando-se o primeiro e o último ponto; CURVAS são capturadas
deslocando-se lentamente o mouse do início ao fim da curva, e
POLÍGONOS, partindo-se de uma origem, transferindo-se todas as
retas e curvas até retornar ao ponto inicial.
QUAIS SÃO OS PROBLEMAS ASSOCIADOS À
CAPTURA MANUAL DE DADOS ????
O meio analógico é instável, cada vez que o mapa é removido da
mesa, a nova sessão deve iniciar pelo reconhecimento dos pontos
de controle;
Nem sempre os mapas revelam precisão, por exemplo, em vales
estreitos, torna-se muito difícil a separação entre riachos, estradas
de ferro e rodovias que ocorram simultaneamente no vale;
A fadiga do operador deve ser levada em consideração;
Os mapas, com o passar do tempo, podem sofrer efeitos da
dilatação térmica;
Nem sempre os mapas originalmente foram desenhados para serem
digitalizados.
ERRO TOTAL
Durante o processo de captura de dados, numerosos erros
podem ser encontrados, sendo o erro total o somatório de
vários erros que pode ser expresso pela seguinte equação:
ERRO TOTAL = f(a) + f(m) + f(c) + f(d) + f(e) + f(p) + f(RMS) + f(pe) + f(id) + f(at) + f(hi) + I
Em que:
f(a) = transformação da superfície esférica da Terra em superfície plana;
f(m) = precisão da medida localizada na Terra (projeção cartográfica e datum);
f(c) = interpretação cartográfica;
f(d) = erro do desenho devido ao tamanho das linhas;
f(d) = estabilidade do material (dobras, emendas etc);
f(p) = erro no processo de digitalização;
f(RMS) = precisão do erro médio quadrático;
f(pe) = precisão do equipamento (armazenamento de dados, número de dígitos);
f(id) = idade do mapa;
f(at) = descrição dos atributos ligados aos dados espaciais;
f(hi) = dados históricos do mapa;
I = erros adicionais não explicados.
DEFINIÇÃO DE INCERTEZA, PRECISÃO,
EXATIDÃO, ACURÁCIA E ERRO
INCERTEZA
PRECISÃO
EXATIDÃO
Conceito ou a condição de estar em dúvida
sobre um valor;
Grandeza estática que mede a dispersão,
sendo, portanto, uma medida de
repetibilidade das observações.
É a medida de aproximação entre um modelo
matemático e o fenômeno representado.
EXEMPLO
ACURÁCIA
ERRO
Uma distribuição possui acurácia se, dado
algum intervalo de probabilidade, ela contém
a resposta verdadeira.
É a diferença entre um valor medido ou
calculado e o valor correto.
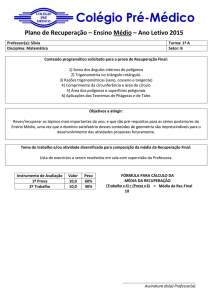
REPRESENTAÇÃO ESQUEMÁTICA DA
EXATIDÃO, PRECISÃO E ACURÁCIA
Exatidão
Valor verdadeiro
Precisão
COMO GARANTIR A QUALIDADE DOS DADSO EM
UM SIG ???
1º EXEMPLO PRÁTICO
Para garantir a qualidade dos dados em um SIG, é
Imaginemos que um MAPA DE SOLO foi produzido a partir de interpretações de
indispensável
que
sejam
testes
para garantir
a solo:
IMAGENS
DE SATÉLITE,
tendo
sidorealizados
identificados
os seguintes
tipos de
acurácia dos dados, uma vez que
é praticamente O mapa
ARENOSO, ARGILOSO,ARENO-ARGILOSO
e ARGILO-ARENOSO.
impossível
SIG trabalhar
comque
dados
exatos. Um
dos (MAPA
Pedológico
produzidoum
apresentou
64 PIXELS
representam
os solos
mais simples é determinar os
PEDOLÓGICOprocedimentos
INTERPRETADO):
ERROS DE COMISSÃO (EC) e de OMISSÃO (EQ), que variam
ARENOSO = CATEGORIA 1;
entre 0 e 1 (maior erro).
VEJA OS MAPAS
ARGILOSO = CATEGORIA 2;
ARENO-ARGILOSO = CATEGORIA 3;
ERRO DE
COMISSÃO (EC)
ERRO DE
OMISSÃO (EO)
ARGILO-ARENOSO = CATEGORIA 4.
Foram realizadas etapas de campo e produzido um MAPA PEDOLÓGICO
REAL representando a realidade. Embora o número de pixels seja o mesmo, há
a não
interpretação
de
pixels
existentes
no terreno.
ÉÉaquele
decorrente
interpretação
dea pixels
queforam
não
diferenças
entre
os dois. Para da
analisar
quantitativamente
ACURÁCIA,
calculados o EC e o EO. existem no terreno.
MAPA PEDOLÓGICO INTERPRETADO (IMAGEM SATÉLITE)
Colunas
1
2
Linhas
3
4
5
6
7
8
1
2
3
4
5
6
7
8
1
1
1
2
2
4
3
3
1
1
1
2
2
4
3
3
1
1
1
2
2
4
3
3
2
2
2
2
2
4
4
3
2
2
2
2
2
4
1
1
3
3
3
3
3
4
1
1
3
3
3
3
2
2
2
2
3
4
3
2
2
2
2
2
CATEGORIA 2
4
1 (Total: 25
13
8 Pixels):
3
18
L2,C8;
L1,C1; L6,C1;
L1,C2; L6,C2;
L1,C3; L6,C3;
L2,C1; L6,C4;
L2,C2; L6,C5;
L2,C3;
L1,C4;
L1,C5;
L2,C4;
L2,C5;
L3,C4;
L3,C5;
L1,C6;
L1,C7;
L1,C8;
L2,C6;
L2,C7;
L3,C6;
L6,C6;
L3,C1; L7,C4.
L3,C2; L4,C4;
L3,C3; L4,C5;
L7,C5; L4,C8;
L7,C6; L5,C1;
L8,C5;
L4,C1;
L4,C2;
L3,C7;
L3,C8;
L4,C6;
L4,C7;
L5,C5;
L7,C1;
L8,C6. L5,C3;
L5,C2;
L7,C2;
L7,C3; L5,C4;
L8,C1; L5,C5;
L8,C2; L5,C7;
L8,C3; L5,C8;
L8,C4.
L6,C7; L6,C8; L7,C7; L7,C8; L8,C7; L8,C8.
MAPA PEDOLÓGICO REAL (TRABALHO DE CAMPO)
Colunas
1
2
Linhas
3
4
5
6
7
8
1
2
3
4
5
6
7
8
1
1
1
2
2
4
3
4
1
1
1
2
2
4
3
4
1
1
1
2
2
4
4
4
2
1
2
2
2
4
4
4
2
2
2
2
2
4
4
4
2
2
2
3
3
4
4
4
3
3
3
1
2
2
2
4
3
3
1
1
1
2
2
4
2 (Total: 18
22
3
9 Pixels):
CATEGORIA 4
1
15
L1,C5; L6,C2;
L1,C6; L6,C3;
L2,C5; L6,C4;
L2,C6;
L3,C4;
L3,C5;
L1,C7;
L1,C8;
L2,C7;
L2,C8;
L3,C7;
L4,C6;
L6,C1;
L1,C1;
L1,C2;
L1,C3;
L1,C4; L6,C5;
L2,C1; L6,C6;
L2,C2;
L3,C6;
L4,C1;
L4,C2;
L4,C3;
L4,C4;
L4,C5;
L5,C6;
L7,C1;
L7,C2.
L7,C3;
L2,C3; L7,C4;
L2,C4; L7,C5;
L3,C1; L7,C6;
L3,C2; L8,C1;
L3,C3; L8,C2;
L3,C8;
L5,C1;
L5,C2;
L5,C3;
L5,C4; L8,C7;
L5,C5; L8,C8.
L5,C7;
L8,C3;
L4,C7; L8,C4;
L4,C8; L8,C5;
L5,C8. L8,C6;
L6,C7; L6,C8; L7,C7; L7,C8.
A PARTIR DAS INFORMAÇÕES
CONTIDAS NAS LINHAS E COLUNAS
DOS MAPAS INTERPRETADO (IMAGEM
DE SATÉLITE) E REAL (TRABALHO DE
CAMPO), PODEMOS CRIAR UMA
TABELA DE VALIDAÇÃO CRUZADA
PARA AUXILIAR O CALCULO DO EC E
EO.
VEJA O RESULTADO
FINAL
EXPLICAÇÃO
DADA
TABELA
EXPLICAÇÃO
TABELA
Percebe-se
que
o menor
ERRO
OMISSÃO
refere-seaoaoSOLO
SOLO
UTILIZANDO
OS que
DADOS
CONTIDOS
NOS
EXEMPLOS
ANTERIORES,
Percebe-se
o menor
ERRO
DE DE
COMISSÃO
refere-se
ARENO-ARGILOSO (0,11), ou seja, somente 1 pixel encontrado no mapa
ARGILO-ARENOSO
(0,13) eCRUZADA
SOLO
ARGILOSO
(0,13).
Por interpretado.
exemplo,
realVALIDAÇÃO
não correspondeu
ao seu
equivalente
noCÁLCULO
mapa
TABELA
DE
PARA
DEpara
ECo E EQ
Mapasomente
Real 1 pixel encontrado no mapa
SOLO ARGILO-ARENOSO, em cada um deles,
Mapa Interpretado
Arenoso
Argiloso ao seu
ArenoErro de
interpretado
não correspondeu
equivalenteArgilono mapa real (no campo).
(1)
(2)
argiloso
arenoso
TOTAL
Comissão
(3)
(4)
Arenoso
(1)
9
0
0
4
13
(1 - 9/13)
0,31
Argiloso
(2)
4
20
0
2
26
(1 - 20/23)
0,13
Arenoargiloso
(3)
1
3
8
5
17
(1 - 8/17)
0,53
Argiloarenoso
(4)
0
0
1
7
8
(1 – 7/8)
0,13
TOTAL
14
23
9
18
64
-
Erro de
Omissão
(1 - 9/14)
0,36
(1 - 20/23)
0,13
(1 - 8/9)
0,11
(1 - 7/18)
0,61
-
(1 - 44/64)
0,31
2o EXEMPLO PRÁTICO
Para avaliações mais elaboradas,
Tomemos como exemplo duas matrizes 5 x 4, portanto com
recomendamos o cálculo do ÍNDICE DE
grau de liberdade de igual a 19, uma representando um
KAPPA, que mede a acurácia dos dados
MAPA DE VEGETAÇÃO INTERPRETADO, seja a partir de
espaciais, desde que dados colecionados em
imagens de satélite, seja produzido a partir de compilação
campo sejam utilizados como referência. O
bibliográfica, e outro mapa derivado de um exaustivo
ÍNDICE DE KAPPA (IK) varia de 0 a 1, e os
TRABALHO DE CAMPO. As categorias são as seguintes:
dados serão mais acurados quanto mais o
índice se aproximar de 1.
MATA NATIVA = CATEGORIA 1;
REFLORESTAMENTO = CATEGORIA 2;
CAPOEIRA = CATEGORIA 3;
CULTURA AGRÍCOLA = CATEGORIA 4.
MAPA
DE VEGETAÇÃO
RESULTANTE
INTERPRETADO
OMAPA
ÍNDICE
KAPPA é calculado de
acordo
com a seguinte
equação:
Neste
caso,
o
ÍNDICE
KAPPA
será:
DOS TRABALHOS DE CAMPO
DA VEGETAÇÃO
D Q
IK
11 T5,4Q
1 1 2 4 4 IK
10,382 2 2 4
Em que:
20 5,4
D: Soma
na diagonal; 1 3 2 2 2
1 dos2 valores
2 encontrados
4 4
CONCLUSÃO
T: Total dos 3
pixels2examinados;
4 2não são acurados o suficiente
3 3 para
3 os
2 procedimentos
2
Portanto 1
os dados em
exame
e
simulações em SIG. Espera-se que dados possuindo u IK superior a 0,65 façam parte
Q: (2 * 4/20 + 9 * 7/20 + 8 * 4/20 + 1 * 5/20) = 5,4
de banco3de dados
pelos SIGs. 3 3 3 3 2
3 3que são
2 utilizados
2
TOTAL
1
2
3
4
2
1
1
0
1
4
0
4
3
0
2
7
0
0
4
0
3
4
0
4
0
1
4
5
2
9 8
1
11
TOTAL
BANCO DE DADOS
VERDADE DE CAMPO
TABULAÇÃO CRUZADA
RÉPRESENTANDO AS
COINCIDÊNCIAS ENTRE
O MAPA DE VEGETAÇÃO
INTERPRETADO E O
MAPA DERIVADO DOS
TRABALHOS DE CAMPO.
A quantificação do erro operacional
é feita utilizando-se o ERRO MÉDIO QUADRÁTICO
Enquadramento
(Root Mean Square – RMS) no eixo das ordenadas e abscissas
e, erro
por fim,
o cálculo do
RMS (x):
médio
feito pela mesa
RMS total será representado graficamente como a hipotenusa
de um
triângulo
Enquadramento
quadrático,
eixo
x
retângulo.
original do mapa
O RMS calculado pode ser calculado segundo três perspectivas
N diferentes: 2
1
i
Escala do mapa;
Probabilidade de erro de um objetivo ser alcançado;
i 1
Produto final esperado.
x
x
N
RMS (y): erro médio
quadrático, eixo y
RMS(x)
N
i 1
RMS(y)
RMS(t)
y1 yi
2
N
RMS (t): erro médio
quadrático total
RMS (t )
RMS( x) RMS( y)
2
2
Com relação a escala de um mapa a entidade “Padrões de Acurácia em Mapas
Nacionais dos Estados Unidos” determinou que os mapas não deverão ter mais do que
10% de pontos testados, ou de verificação, com erros em faixas:
Maiores que 1/30 polegadas em torno dos pontos verdadeiros, para mapas com
escalas 1:20.000 ou menores;
Maiores que 1/50 polegadas em torno dos pontos verdadeiros, para mapas com
escalas maiores ou iguais 1:20.000.
Probabilidade de distribuição de um ponto.
Para um mapa na escala 1:25.000,
existem 90% de chance de o ponto se
posicionar em um círculo de raio 13 m
partindo do ponto real.
Probabilidade de distribuição de uma
linha. Para um mapa na escala
1:25.000, existem 90% de chance
da linha se colocar em uma distância
de até 13 m da linha central.
Atualmente, em virtude da formidável mudança nas técnicas de
coleta de dados, é aqui sugerido que a faixas correspondam a
1/50 polegadas para mapas com escalas 1:20.000 ou menores e
1/60 polegadas para mapas com escalas maiores que 1:20.000.
A conversão para padrões de acurácia é feita baseada em
estatística. O RMS permitido requer que 90% de erros acidentais
não devem ser maiores que 1,64% do RMS calculado, isto é,
1,64 desvios padrões, assumindo uma distribuição normal dos
erros.
EXEMPLO 21
Se tivermos um mapa com escala de 1:15.000, o erro aceitável
Se tivermos
um
mapa
comaceitável
escala demultiplicado
1:25.000: pela
ou o RMS
permitido
será
o erro
conversão da escala, multiplicado pela conversão da
unidade, dividido por 1,64,ou seja:
11
pol**15
25..000
000**00,,0254
0254 m/pol
m/pol
pol
60
50
RMSpermitido
45 m
m
RMS
46,,64
permitido
1,64
1,64
PROCEDIMENTOS BÁSICOS UTILIZADOS
NA CAPTURA DE DADOS ANALÓGICO
TECLADO
ARQUIVO
ASCII
DADO
ANALÓGICO
SCANNER
SCANNER
ARQUIVO
RASTER
ARQUIVO
ASCII
PDI
DADO
VETORIAL
CAD
DADO
ASCII
CONVERSOR
DADO
VETORIAL
CAD
DADO
ASCII
DADO
RASTER
DADO
ANALÓGICO
MESA
DIGITALIZADORA
OCR
DADO
VETORIAL
CAD
ARQUIVO
ASCII
PRINCIPAIS ERROS QUALITATIVOS DERIVADOS
DOS PROCESSOS DE VETORIZAÇÃO
ÉHESITANTE
recomendável
GIROS
CURVAS
que, tendo finalizado
ESTREITAS
todos
os processos de vetorização, seja executada
uma etapa de EDIÇÃO DOS MAPAS
para as correções dos chamados erros
EXCESSO
OU FALTA
qualitativos,
antes
NÓS
de migrá-los para um
ambiente SIG.
ALGUMAS QUESTÕES RELACIONADAS COM OS DADOS
a) Em que época os dados foram coletados?
b) Qual a fonte de dados?
c) Em qual formato dos dados foram originalmente coletados?
d) Qual é a área coberta pelos dados?
e) Qual foi a escala do mapa utilizada para digitalização?
f) Quais foram os sistemas de coordenadas e projeções e qual foi o datum?
g) Qual foi a densidade de observações usada para compilação?
h) Qual a acurácia das feições no que se refere às posições e atributos?
g) Qual é a consistência e a lógica dos atributos?
h) Como os dados foram testados?
DADOS VETORIAIS
As entidades vetoriais podem ser :
PONTUAIS: Representadas por um único par de coordenadas;
LINEARES: Representadas por dois pares de coordenadas;
POLIGONAIS: Correspondem a um conjunto de entidades lineares, cujo
pares de coordenadas inicial e final são os mesmos;
As entidades poligonais podem ser estruturadas
em diferentes formatos. Os mais comuns são:
MODELO TOTAL, MODELO TOPOLÓGICO,
MODELO ESPAGUETE, DUAL INDEPEDENT
MAP ENCODING (DIME), MODELO
RELACIONAL E DIGITAL LINE GRAFHS (DGL).
MODELO TOTAL
MODELO TOTAL
EIXO Y
É a forma mais simples de estruturação. Cada polígono é codificado
em coordenadas X e Y, não mantendo as relações matemáticas entre
objetos . Não há mecanismos explícitos para referenciar polígonos que
sejam adjacentes.
EX: Arquivos gerados em programas do tipo CADD.
EIXO X
FEIÇÕES
NÚMERO
REPRESENTAÇÃO
POLÍGONOS
1
2
X1Y1...XnYn
X1Y1...XnYn
MODELO TOPOLÓGICO
MODELO TOPOLÓGICO
Apresenta uma estrutura compacta. Seus elementos são divididos em arcos e
linhas. O início, o término ou o encontro de arcos são denominados nós, as
relações matemáticas entre os objetos são mantidas. Constitui-se um dos
mais comuns de representação de dados vetoriais. As relações matemáticas
entre objetos são registradas em tabelas: uma para ÁREAS, outra para
ARCOS e outra para NÓS. Em uma quarta tabela encontram-se registradas
as COORDENADAS. Os arcos que definem os limites de cada polígono são
codificados, por convenção, no SENTIDO HORÁRIO.
ARCO
COORDENADAS
NÓ INICIAL
NÓ FINAL ARCOS
POL. ESQ.
NÓ
POLÍGONO
ARCOS
ARCO
a1
INÍCIONx, y
1
a1
3,4
a
6,3; 6
a3
6,3; 6
a2
a3 2
N2
N2
AN1
BN2
PONTO
N2INTERMEDIÁRIO
C
,a
1,a
1,3; 4 / 1,3; 7aa
/16,3;
272
N1
N1
A
4; 4
aa2,a
1,a
3 3C
3; 1,1
POL. DIR.
FINAL A
x, y
6,3; 6,1
B
3; 4
B
3; 4
REPRESENTAÇÃO DE DADOS VETORIAIS
SEGUNDO O MODELO ESPAGUETE
MODELO ESPAGUETE
Embora de fácil entendimento e boa adequação para representação de mapas,
apresenta dados redundantes, uma vez que as linhas comuns a dois polígonos
são armazenadas duas vezes e a relações espaciais não são arquivadas.
EX: O SIG
IDRISI
utiliza
este modelo
TIPO
DE
DADO:
(x, y) para arquivar e representar os PIs.
Polígonos (x1, y1, x2, y2;...xn,yn)
(x1, y1, x2, y2;...xn,yn; w1, z1; w2,z2; ...wn,zn)
EXEMPLOMODELO
DE MODELODDE
ESTRUTURAS
IME
DE DADOS
DIMEdos Estados Unidos, em
Foi desenvolvido pelo US Bureau
of the Census
1967, e foi concebido para incorporar informações topológicas de áreas
2
RUA
A os arquivos tipo
urbanas para uso em 1análises II
demográficas.
Embora
DIME geralmente não correspondam à organização interna de um SIG,
eles são comumente
como banco de dados que podem servir a
RUAusados
C
I EDIFICAÇÃO
III
diversos sistemas.
A estrutura dos dados apresenta segmentos lineares e nós
RUA
B
compartilhados pela unidades
adjacentes.
Quando
são necessária
linhas
4
3
IV
curvas, elas são representadas por uma seqüência de segmentos
retos.
CÓDIGO DOS SEGEMENTOS
LOCALIZAÇÃO DOS NÓS
NÓS
POLÍGONOS
NÓS
UTM-E
UTM-W
NOME DO
OBSERVAÇÃO:
Cada segmento é armazenado possuindo três
1
650000
7560000
SEGMENTOessenciais:
DE
PARA
DE
PARA
componentes
Um nome
da rua) que
RUA A para o 1segmento
2 (ex: o
- nome
CAMPO
2 o identifica;
700000
7560000
Um nome identificando os nós, codificando o início e final dos
RUA B
2
4
CAMPO
3
700000
7590000
segmentos;
RUA C
3indicativo
1 dos polígonos,
CAMPOmostrando
4
650000
7590000
Um componente
se eles estão
do
lado esquerdo ou direito de um determinando segmento.
MODELO DLG
Foi desenvolvido pela US Geological Survey. Os dados existentes na
estruturação DLG são subdivididos em diversos níveis temáticos:
Informações de limites que incluem os limites políticos e
administrativos de uma região;
Componentes de rede de drenagem;
Rede de transporte;
Uso e ocupação das terras.
Clique aqui para ver o quadro de comparação
entre os modelos vetoriais
VANTAGENS E DESVANTAGENS DA UTILIZAÇÃO DAS
DIVERSAS ESTRUTURAS DE DADOS VETORIAIS
TIPO
VANTAGENS
DESVANTAGENS
Estrutura compacta.
Não há mecanismos explícitos
para referenciar áreas
adjacentes. As relações
matemáticas entre objetos não
são arquivadas.
MODELO
TOPOLÓGICO
Estrutura compacta. As relações
matemáticas entre objetos são
arquivadas. Rápido
processamento de dados.
Estrutura complexas.
Redundância de dados.
MODELO
ESPAGUETE
Estrutura compacta e de fácil
entendimento. Adequado para
mapas.
Lento processamento de dados.
As relações espaciais não são
arquivadas. As linhas comuns a
dois polígonos são arquivadas
duas vezes.
DIME
As estruturas e os atributos são
arquivados separadamente.
Redundância de dados.
Complexo gerenciamento de
arquivos.
DLG
São topologicamente
estruturados. Custo baixo.
Estrutura complexas.
MODELO
TOTAL
DADOS RASTER
Os dados raster são estruturados em modelos bem
mais simples e de forma mais compacta que os
dados vetoriais. As estruturas mais comuns são:
Para ilustrar as diferenças entre estas estruturas, utilizaremos
CÓDIGO DE CADEIAS
uma matriz composta por 8 LINHAS e 8 COLUNAS, na qual
RUN-LENGTH
ENCODING
(RLE)real (tipos de solo 1, 2
Estão codificadas
três feições
do mundo
e 3), que
podem
ser armazenadas
um arquivo contendo 64
VALUE
POINT
ENCODING em
(VPE)
unidades de bytes.
MODELOS HIERÁRQUICOS,
em que se
destacam o QUADTREE e os BLOCOS MÁXIMOS.
1
1
1
1
1
2
2
2
1
1
1
1
1
2
2
2
1
1
1
2
2
2
2
2
1
1
1
2
2
2
2
2
1
1
1
2
2
2
2
2
2
2
2
2
2
3
3
2
2
2
2
2
2
3
3
2
2
2
2
2
2
2
2
2
LINHA
COLUNA
ATRIBUTO
REPRESENTAÇÃO MATRICIAL DE
3 DIFERENTES TIPOS DE SOLO
OBS: As informações registradas
correspondem a 56 unidades de bytes
CODIFICAÇÃO
O CÓDIGO
DE1 CADEIAS1 usa uma15notação
1
, 03, 35, 23 particular, os algarismos
0, 1,
como
direções ESTE,
1 2 e 3 servem
4
1 bases representando
11, 01, 31, 21
CODIFICAÇÃO
1
6
2
15, 03, 35, 23
SUL,
OESTE
e NORTE,
respectivamente.
A partir
linha 1 EM
e
ESTRUTURA CÓDIGO
6, 02, 36, 22
3
4
2
1
coluna 1, no sentido anti-horário, os dados sãoDE
organizados
CADEIAS, A
3, 33, 23
6
1
2 categoria.
13, 0Assim,
DA MATRIZ
segundo
determinada
partePARTIR
da categoria
1
ANTERIOR
6 codificada
6
21
está
como:3 15, 03, 351,1,2031., 3A1, estruturação
em código
0, 02, 30, 20
de8 cadeias6 reduziu o2tamanho1do
arquivo em 8 unidades de
8
8
2
13, 00, 30, 20
bytes.
1
1
1
1
1
2
2
2
1
1
1
1
1
2
2
2
1
1
1
2
2
2
2
2
1
1
1
2
2
2
2
2
1
1
1
2
2
2
2
2
2
2
2
2
2
3
3
2
2
2
2
2
2
3
3
2
2
2
2
2
2
2
2
2
REPRESENTAÇÃO MATRICIAL DE
3 DIFERENTES TIPOS DE SOLO
EXEMPLO: Para a nossa matriz temos:
LINHA 1: (5,1), (3,2);
LINHA
2: (5,1),
O principio
do(3,2);
RLE (Run-Length Encoding) consiste em que
LINHA 3: (3,1), (5,2);
pixels
adjacentes
LINHA
4: (3,1),
(5,2); tendo o mesmo atributo são combinados
juntos,
como(5,2);
uma tira, representada por um par de números.
LINHA
5: (3,1),
nova linha inicia uma nova tira..
LINHA 6: (5,2),Cada
(2,3), (1,2);
LINHA 7: (5,2), (2,3), (1,2);
LINHA 8: (8,2).
1
1
1
1
1
2
2
2
1
1
1
1
1
2
2
2
1
1
1
2
2
2
2
2
1
1
1
2
2
2
2
2
1
1
1
2
2
2
2
2
2
2
2
2
2
3
3
2
2
2
2
2
2
3
3
2
2
2
2
2
2
2
2
2
REPRESENTAÇÃO MATRICIAL DE
3 DIFERENTES TIPOS DE SOLO
EXEMPLO:
ParaPoint
a nossa
matriz temos,
1 ea linha
O VPE (Value
Encoding)
codifica coluna
os dados
partir 1:
da
linha 1 e coluna 1, continuamente, associando o atributo ao
5(1);
2(8); 1(13);
2 (16);
1(21);
2(24); 1(26);
2(32);tem-se
1(35); 2(45);
número
de pixels.
A cada
mudança
de atributo
um
determinado número de pixels.
3(47); 2(53); 3(55); 2(64).
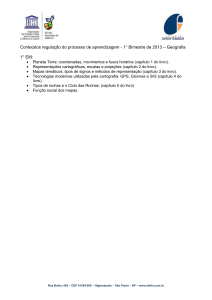
REPRESENTAÇÃO GRÁFICA DA CODIFICAÇÃO DE
DADO RASTER EM ESTRUTURA QUADTREE
O princípio fundamental do QUADTREE é a divisão do dado raster a partir
de múltiplos polígonos regulares (quadrados). Assim, o primeiro quadrado,
que compreende toda a matriz, contém 3 categorias. Este é dividido em
sucessivos quadrados, até a unidade fundamental, que é o pixel.
1
1
1
1
1
2
2
2
1
1
1
1
1
2
2
2
1
1
1
2
2
2
2
2
1
1
1
2
2
2
2
2
1
1
1
2
2
2
2
2
2
2
2
2
2
3
3
2
2
2
2
2
2
3
3
2
2
2
2
2
2
2
2
2
OBS: O modelo de Blocos Máximos é uma variante do quadtree, cujo objetivo é
eliminar possíveis redundâncias. A matriz é subdividida em polígonos regulares,
não necessariamente quadrados, e cada polígono contém um único atributo.
VANTAGENS E DESVANTAGENS DO USO DAS
ESTRUTURAS DE DADOS RASTER
MÉTODOS DE
COMPRESSÃO
RLE e VPE
CÓDIGO DE
CADEIAS
VANTAGENS
São voltados para pequenos
computadores. Estrutura
simples.
Estrutura simples. Dados
compactados.
DESVANTAGENS
Menos eficiente quando o limite
entre os polígonos aumenta.
Aumenta os tamanhos dos
arquivos e o tempo de
processamento quando o
número de polígonos aumenta.
Presença de redundância; os
limites dos polígonos são
armazenados duas vezes.
Superposições são difíceis sem
que se retorne à grade originais.
BLOCOS
MÁXIMOS
Eficiente para formas simples e
grades.
Limitado para ser usado em
arquivos com muita variedade
espacial.
QUADTREE
Estrutura elegante. Dados
compactados. Rápido
processamento.
Dificuldade para criação e
atualização de arquivos.
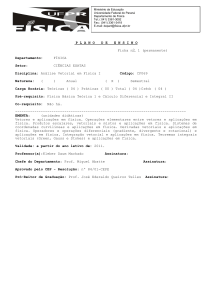
REPRESENTAÇÃO DE DADOS RASTER EM FORMATO BSQ, BIL E BIP
OBSERVAÇÃO 12
OBSERVAÇÃO
Quando operações
BIP
envolvem
(Band
BSQ
(Band
um
Interleavead
simples
Sequencial)
tema ou um
bylayer
Pixel)
de cada vez, o BSQ
BIL
(Band
Interleaved
by
Line)
Quando necessita-se
operar com
mais de um tema
ao mesmo tempo, o
é mais eficaz, porque o tema específico pode ser manipulado como uma
BIP
é maisfísica
eficaz.
Ex:
Se quisermos
comparar
dois
tema,
por
exemplo,
entidade
independente.
Ex:
Se
tivermos
as como
informações
temáticas
de
Conserva
Todas
cada
informações
dado
uma
sobre
variável
um pixel
são
um
conservadas
arranjo
Todas
asas
variáveis
de de
uma
variável
de
uma
simples
linh em
são
parae encontrar
áreas eonde
as mais
altasaelevações
elevação
classes de as
florestas
quisermos
derivar
declividadeestejam
o BSQ deverá
separado.
juntas.
armazenados
seguindo
os
valores
das
outras
linhas.
associadas às classes deser
florestas,
usado. o BIP é recomendado.
[BSQ] Arquivo 1: zoneamento A, B, C;
Arquivo 2: geologia I, II,III;
Arquivo 3: elevação 11, 12, 13;
[BIP] Linha 1: A, I, 12 (P1); A, II, 12 (P2); B, I, 12 (P3);
Linha 2: A, I, 12 (P1); B, II, 11 (P2); C, III, 13 (P3);
Linha 3: A, I, 12 (P1); B, II, 13 (P2); C, III, 14 (P3);
[BIL] Linha 1: A, A, B, I, II, III, 12, 12, 12;
Linha 2: A, B, C, I, II, III, 12, 11, 13;
Linha 3: A, B, C, I, II, III, 12, 13, 14;
QUAIS AS VANTAGENS DOS MODELOS
RASTER E VETORIAL ???
MODELO RASTER
MODELO VETORIAL
Os dados possuem uma estrutura
simples;
Possui uma estrutura de dados
compacta;
Operações de superposição são
facilmente implementadas;
Permite uma codificação da
topologia de forma eficaz, como
resultado das análises de rede são
facilmente implementadas;
Altas variabilidades espaciais são
eficientemente representadas;
Permite operações matemáticas
com precisão;
Operações de modelagem e
simulação são facilitadas;
É recomendado para gráficos que
devam se aproximar dos desenhos
feitos à mão;
QUAIS AS DESVANTAGENS DOS MODELOS
RASTER E VETORIAL ???
MODELO RASTER
MODELO VETORIAL
A estrutura dos dados toma muito
espaço de memória;
A estruturação dos dados é
complexa;
As relações topológicas são
difíceis de serem representadas;
Operações de superposição são
difíceis de serem implementadas;
O produto final pode não ser
esteticamente agradável;
A representação de alta
variabilidade espacial não é eficaz;
CONVERSÃO DE DADOS EM SIG
A) RASTER PARA VETOR:
PONTOS: O pixel correspondente no formato raster terá no seu centro as
coordenadas geográficas e será codificado com o atributo do
ponto.
LINHAS:
A mais simples estratégia consiste em identificar os pixels que
são cortados pelas linhas e codificá-los com o atributo associado
a linha. OBS: Efeito ESCADA ou DENTE DE SERRA.
POLÍGONOS: Duas estágios: Primeiro idêntico ao anterior (linhas).
Segundo, os elementos raster contidos pelos limites do
polígono são registrados com um atributo apropriado.
B) VETOR PARA VETOR:
É mais complexa e não terá nenhuma precisão, uma vez que a natureza da linha foi
perdida no processo, não sendo mais possível recuperar o caráter da linha reta sem
informações adicionais. Entretanto existem certos algoritmos que podem extrair linhas
de dados raster sob condições restritivas e com um custo adicional de computação.