Servomecanismo
N7SRV
Prof. Dr. Cesar da Costa
4.a Aula: Aplicações de Encoder, resolver e tacogerador
Aplicacoes de Encoder
A aplicacão tem como base um protótipo de esteira rolante,
industrial, acionada por um motor de indução trifásico (tipo gaiola)
de 0,15KW, com caixa de redução de velocidade, que por sua vez é
controlado pelo inversor de freqüência MM420 da SIEMENS.
Um encoder incremental de 10 Bits de resolução da DANAHER
HOHNER foi acoplado ao motor, gerando uma aplicação
semelhante à apresentada na Figura 1, podendo-se obter
parâmetros como posição, velocidade e frequência de chaveamento
elétrico do motor AC.
Aplicacoes de Encoder
Aplicacoes de Encoder
Para viabilizar o projeto, desenvolveu-se uma interface
microcontrolada com display, baseada no microcontrolador 89S52, da
ATMEL.
A interface recebe os sinais gerados pelo encoder, interpretando a
quantidade e variação temporal destes, e então calcula a posição,
frequência do sinal do encoder, velocidade de rotação e frequência de
chaveamento do motor, representados respectivamente por Pos, Vel2,
Vel1 e Freq, no display LCD utilizado.
Aplicacoes de Encoder
Configurando-se o inversor de frequência para operar a 58,2 Hz
(Freq), que corresponde a uma velocidade de rotação no eixo do
motor de 1.746 rpm (Vel1) e frequência no encoder de 29,798KHz
(Vel2), foram obtidos os resultados apresentados na Figura 2.
Considerando-se a redução de 10 vezes ocasionada pela caixa de
redução de velocidade do motor AC, os resultados obtidos divergem
em menos de 1,6% dos valores esperados e estão bem próximos dos
obtidos com um tacômetro profissional.
Neste exemplo foi desenvolvido um sistema para obter posição,
velocidade e frequência de rotação do eixo de um motor AC,
controlado por um inversor de frequência, usando-se um encoder
incremental.
O sistema obtido é preciso e o uso de um microntrolador o torna
flexível, podendo ser usado com eficiência em sistema práticos ou
como unidade básica de desenvolvimento para novas aplicações.
Aplicacões Industriais
Aplicacão em Máquinas de Enchimento de Garrafas
Aplicacão em Máquinas de Impressão de Etiquetas
Aplicacão em Máquinas de Deteccão de Objetos
Aplicacão em Máquinas de Corte
Aplicacão em Elevadores
Aplicacão em Elevadores
Características Importantes:
Pequenas Aplicacoes
Na verdade, não existe um encoder que seja ideal para todas as aplicações; cada
caso é um caso, o encoder mais utilizado é o incremental, pois não é tão caro e
abrange quase todas as necessidades. Mas existem aplicações onde somente o
encoder absoluto é recomendado.
Figura 3: Micro-encoder para pequenas aplicações.
Exemplos de Encoders Comerciais
Fig. 4: Encoder Absoluto
Fig. 5: Encoder utilizando interface para a
rede interbus
TIPOS DE SAÍDAS DE SINAL
Independentemente do tipo de encoder a ser utilizado, este tem que
enviar os pulsos ou os valores de contagem através de um circuito
eletrônico de saída do sinal, para que a posterior interpretação dos
dados seja feita por uma placa de um CLP, CNC, Robô ou até
mesmo circuitos dedicados com microcontroladores.
A tendência hoje é a utilização de encoder com saída para rede
Fieldbus como, por exemplo:
- Interbus;
- Profibus;
- Device Net;
- CAN.
ENCODER UTILIZANDO INTERFACE PADRÃO RUGGED
PARA A REDE INTERBUS
Nos encoders absolutos existem uma grande quantidade de fios a
serem conectados, e com o uso do Fieldbus diretamente ao encoder
não precisamos de tais conexões.
Fig. 6: Encoder utilizando interface para a rede interbus
Quando não utiliza-se o Fieldbus (rede industrial), temos diversos
circuitos de saída de sinal, entre os quais pode-se citar:
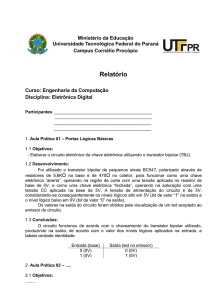
Saída NPN e NPN Coletor aberto:
É composto apenas por um transistor do tipo NPN e um resistor na
configuração pull-up, o qual polariza o transistor em seu ponto
quiescente. Esse circuito é similar a lógica TTL e por essa razão é
considerado compatível com ela.
Quando dimensionado corretamente, na saturação do transistor a
saída chega aproximadamente a 0 V, e no corte a tensão de saída
fica próximo à tensão de alimentação.
O comportamento do circuito fica comprometido pelo aumento da
distância do cabo até a carga, pela frequência dos pulsos a serem
transmitidos e pelo aumento da carga.
Assim, para uma aplicação ideal esses parâmetros devem ser
levados em consideração. A saída em coletor aberto se diferencia
pela falta do resistor de polarização. Com isso, quem polariza o
transistor é a própria carga, permitindo que se obtenham diferentes
níveis de sinais na carga (figura 7).
Figura 7 - Circuito de saída NPN com e sem coletor aberto.
Saída PNP e PNP Coletor aberto:
Tomemos as mesmas considerações do circuito NPN. A principal
diferença está no transistor, que é do tipo PNP, e por isso seu emissor
está no positivo da fonte. O resistor quando presente serve como pulldown para o circuito de saída (figura 8).
Fig 8 - Circuito de saída PNP com e sem coletor
Saída Push-Pull:
Este circuito é utilizado para aumentar a performance do circuito de
saída. Na verdade, a maior limitação dos circuitos anteriormente
apresentados é que o resistor tem que possuir uma resistência muito
maior que a impedância de um transistor saturado, e com isso a carga
está limitada a uma alta impedância.
Para resolver esse problema, um outro transistor é inserido formando
uma configuração em push-pull, com isso a impedância da carga pode
ser
menor.
Essa solução aumenta a performance de frequência, e favorece um
maior trecho de cabo entre o encoder e a carga até mesmo em altas
velocidades de transmissão (figura 9).
Saída Push-Pull:
Fig 9 - Circuito de saída Push-Pull
Saída com Drive de Linha:
Este é utilizado em ambientes sujeitos a distúrbios elétricos ou onde a
distância do encoder até a carga seja muito grande. A transmissão dos
sinais se dá de forma complementar. Por isso, o distúrbio elétrico é
reduzido substancialmente (desde que o cabo seja blindado e
trançado), essas interferência são chamadas interferências em modo
comum (figura 10).
Fig 10 - Circuito de saída com drive de linha
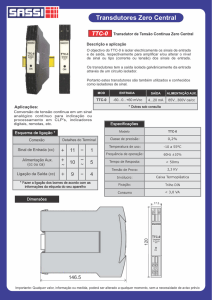
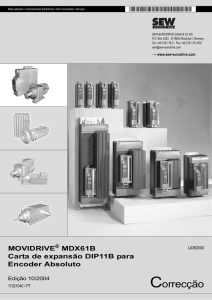
Exemplos de Especificacões de Saída:
Exemplos de Especificacões de Saída:
Exemplos de Especificacões de Saída:
Como funciona um Encoder:
https://www.youtube.com/watch?v=Jv6NYeY1n_I
CRITÉRIOS PARA AVALIAÇÃO DOS ENCODERS
1) Sensibilidade:
Sensibilidade é definida como a taxa de mudança de saída para
mudança na entrada. Como exemplo, se um movimento de 0.001 mm
causa uma mudança na saída de 0.02 V, então a sensibilidade é de
20 V/mm.
2) Linearidade
Uma linearidade perfeita faria com que o gráfico de saída versus
entrada fosse uma linha reta. Linearidade é a medida da constância
da taxa de saída para entrada. Na equação Y = b. X, a relação é
perfeitamente linear se b é constante. Se b é variável, então a relação
é não-linear; b pode também ser uma função de X, tal que b = a + d.
X, onde o valor de d introduziria uma não-linearidade. Uma medida da
não-linearidade poderia ser dada como valor de d.
CRITÉRIOS PARA AVALIAÇÃO DOS ENCODERS
3) Faixa
Faixa é a medida da diferença entre o valor mínimo e o valor máximo
medido. Um strain gauge pode ser capaz de medir valores sobre a
faixa de 0.1 a 10 N, e um sensor de ultrassom pode medir distâncias
na faixa de 30 cm a 5 m, por exemplo.
4) Tempo de Resposta
É o tempo necessário para uma mudança na entrada ser observável
como uma mudança estável na saída. Em alguns sensores, a saída
oscila por um certo tempo antes que ele alcance um valor estável.
Pode-se medir então o tempo de resposta desde o início de uma
mudança na entrada até quando a saída alcance uma faixa
especificada.
CRITÉRIOS PARA AVALIAÇÃO DOS ENCODERS
5) Precisão
É a medida da diferença entre os valores medidos e reais. Uma
precisão de +/- 0.001 mm significa que, sobre todas as circunstâncias
consideradas, o valor medido estará dentro de 0.001 mm do valor
real. São necessários equipamentos de medida de calibracão para
verificar essa precisão.
CRITÉRIOS PARA AVALIAÇÃO DOS ENCODERS
6) Repetibilidade
É a medida da diferença entre duas medidas sucessivas sob as
mesmas condições. Um encoder pode ter alta repetibilidade, mas
pouca precisão.
CRITÉRIOS PARA AVALIAÇÃO DOS ENCODERS
A figura abaixo mostra um exemplo claro da diferença entre os conceitos de
precisão e repetibilidade:
CRITÉRIOS PARA AVALIAÇÃO DOS ENCODERS
7) Resolução
É uma medida do número de medidas de valores diferentes possíveis
dentro de uma faixa de mínimo a máximo. É também utilizado para
indicar o valor do menor incremento que é observável. Pode ser dado
em valores percentuais (por exemplo, alguns encoders possuem uma
resolução de 1% da medida de distância).
8) Tipo de Saída
Como visto anteriormente a saída do encoder pode ser coletor aberto,
NPN, PNP, drive de linha ou rede fieldbus, AS.I, CAN.
CRITÉRIOS PARA AVALIAÇÃO DOS ENCODERS
Com relação a suas características físicas, os encoders devem ser
avaliados em relação a:
1) Tamanho e Peso:
Se um sensor deve ser montado em um robô móvel ou na extremidade ou
braço de um robô manipulador, ele se torna parte da massa (além de ocupar
um espaço na mesma) que deve ser acelerada e desacelerada pelos motores
do punho e braço do robô manipulador, ou do motor de acionamento do robô
móvel, tal que ele afeta diretamente o desempenho do robô).
2) Confiabilidade:
A confiabilidade é de grande importância em todas as aplicações de robótica.
Pode ser medida em termos do tempo médio para falhar (MTTF – Mean Time
To Failure) como o número médio de horas entre falhas, que causam uma
impossibilidade de operação do encoder.
CRITÉRIOS PARA AVALIAÇÃO DOS ENCODERS
3) Interfaceamento
Considerações de interfaceamento são frequentemente um fator determinante
na usabilidade dos sensores. Conexões não padrões ou necessidade de
tensões não padrões pode tornar um encoder muito complexo e caro.
Da mesma forma, os sinais de controle e saída de um encoder devem ser
compatíveis com outro equipamento que será usado conjuntamente com o
encoder, por exemplo o controlador.
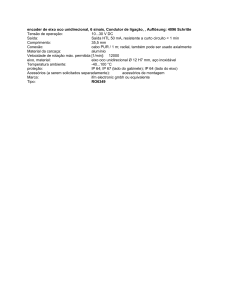
Transdutores Eletromagnéticos
Tacogerador
Os tacogeradores são geradores CC de ímã permanente ou
geradores síncronos CA, também de campo produzido por imãs,
conhecidos como alternadores.
Os tacogeradores CC apresentam uma tensão proporcional à
velocidade, positiva ou negativa, dependendo do sentido de
rotação e, como toda máquina CC, trabalham com escovas.
Os alternadores não necessitam de escovas, o que representa
uma vantagem. Em geral, a tensão de saída é retificada por uma
ponte de diodos, o que faz com que a tensão retificada tenha
sempre o mesmo sinal, independentemente do sentido de rotação.
Transdutores Eletromagnéticos
Tacogerador
Medida de velocidade angular;
Muito ruidoso;
São usualmente acoplados aos
motores, para controle analógico de
de velocidade;
Uso diminuído em função de
controle digital com transdutores
menos ruidosos e mais exatos.
Transdutores Eletromagnéticos
Pick-Up Magnético
Codificador Incremental;
Transdutores de posição e
Velocidade;
Gera uma tensão quando
um dente de material ferro
magnético passa próximo
ao imã e altera o fluxo
Magnético.
Transdutores Eletromagnéticos
Pick-Up Magnético
Sensor de Efeito Hall
Os sensores de efeito Hall podem ser definidos como sendo
transdutores que variam a sua tensão de saída em resposta a um
campo magnético.
O funcionamento destes sensores baseia-se no efeito de Hall. O
efeito de Hall diz que numa área magnética, percorrida por uma
corrente, a qual iremos medir a queda de tensão, verificamos que é
de zero volts.
Mas ao se aplicar um campo magnético a esta mesma área, surge
uma pequena tensão entre as duas extremidades. A diferença destas
duas tensões deve-se ao fato da existência de uma força para
deslocar os eletrons ao longo da área magnética (Força de Lorenz).
Sensor de Efeito Hall
É portanto com a informação desta diferença de potencial que o
sensor de efeito de Hall atua. Estes sensores normalmente são
utilizados para a medição de velocidade e posição.
Fig. Efeito Hall
Sensor de Efeito Hall
Sensor de Efeito Hall
Sensor de Efeito Hall
Sensor de Efeito Hall
Transdutores Eletromagnéticos
Resolvers
Os resolvers não são mais do que transformadores de alta frequência,
onde o seu primário é girante e está situado no rotor do servomotor.
Este possui dois secundários em quadratura que se encontram na sua
parte estática. O seu funcionamento é baseado nas amplitudes e
fases das tensões induzidas nos dois secundários, que são função da
posição do rotor. Outro circuito analisa as tensões induzidas e fornece
uma tensão proporcional à posição do rotor.
Transdutores Eletromagnéticos
Resolvers
A posição inicial do resolver é feita na fábrica no ato da montagem do
servomotor e só pode ser alterada perante a abertura e remontagem
do servomotor. Este tipo de sensor é muito utilizado em servomotores,
aliando ao seu baixo custo uma boa precisão. As figuras a seguir
representam esquematicamente e fisicamente um resolver.
Transdutores Eletromagnéticos
Resolvers
O primário está situado no rotor e existem dois secundários em quadratura
no estator. As amplitudes e fases das tensões induzidas nos secundários são
função da posição do rotor. Um circuito condicionador processa as tensões
induzidas nos secundários fornecendo uma tensão proporcional à posição.
.
Transdutores Eletromagnéticos
Transdutores Eletromagnéticos
Transdutores Eletromagnéticos
Transdutores Eletromagnéticos
Transdutores Eletromagnéticos
Como funciona um Resolver
https://www.youtube.com/watch?v=qCU8b8vo2qE
Transdutores Eletromagnéticos
Transdutores Eletromagnéticos