UNIVERSIDADE FEDERAL DO RIO GRANDE DO NORTE
CENTRO DE TECNOLOGIA
DEPARTAMENTO DE ENGENHARIA ELÉTRICA
INSTRUMENTAÇÃO ELETRÔNICA
PROFESSOR: LUCIANO CAVALCANTI
SENSOR DE VELOCIDADE
Hudson Pinheiro de Andrade
Este trabalho tem como objetivo apresentar
técnicas de medição de velocidade em motores
e elementos girantes através de dispositivos
eletrônicos,
nos
diferentes
processos
industriais, para que seja efetuado o controle
desta variável de processo por elementos de
automação.
Natal, Dezembro de 2008
Introdução
Na maioria dos processos industriais, a velocidade é uma das principais variáveis
a ser controlada. Torna-se então extremamente necessário a medição desta variável de
maneira eficiente e precisa, uma vez que uma variação mesmo que mínima na
velocidade pode acarretar em uma disformidade no produto final. Além disto, quanto
maior a velocidade de um processo ou de uma linha de produção maior será a
produtividade. Classifica-se a velocidade em:
Velocidade Linear: Velocidade descrita em um movimento retilíneo. É dada pela
razão do deslocamento x, ocorrido durante um intervalo de tempo t tendendo a zero,
por esse intervalo de tempo. Ou seja:
Onde:
x = Deslocamento linear
t = Intervalo de tempo
V = Velocidade
Velocidade Angular: Velocidade descrita em um movimento de rotação em
torno de um eixo fixo, chamado de eixo de rotação. É descrita como a razão do
deslocamento angular , ocorrido durante um intervalo de tempo t tendendo a zero,
por esse intervalo de tempo. Ou seja:
Onde:
= Deslocamento angular
t = Intervalo de tempo
= Velocidade angular
Uma das formas de se medir a velocidade é utilizar algum dispositivo que
transforme diretamente esta grandeza mecânica em uma grandeza elétrica. Este
dispositivo existe e é conhecido como tacogerador. Outra forma é através da medição
das grandezas necessárias para se calcular a velocidade, ou seja, o deslocamento (seja
linear ou angular) e o tempo como descrito anteriormente. O Encoder, dispositivo
largamente utilizado na indústria, consegue medir com precisão o deslocamento. Então
na prática, utiliza-se o Encoder e algum outro dispositivo capaz de medir o tempo e
calcula-se a velocidade.
O Tacogerador e o Encoder são sem dúvida os dois
principais métodos de medição de velocidade existentes na indústria, e serão detalhados
a seguir.
Tacogerador
O tacogerador nada mais é do que um gerador DC de ímã permanente acoplado
mecanicamente no eixo em que se deseja medir a velocidade. Embora seja mais
utilizado para medir a velocidade angular em máquinas rotativas, pode-se utilizá-lo para
medir a velocidade linear de máquinas como automóveis, locomotivas entre outras,
sendo que para esse tipo de aplicação é necessário saber o diâmetro da roda em questão.
Este gerador DC gera uma tensão de saída que é proporcional a velocidade do seu eixo,
e é dada por:
Onde:
E = F.e.m. gerada na armadura (Volts)
p = Número de pólos
Ø = Fluxo magnético por pólo (Maxwell)
Z = Número de condutores na armadura
m = Número de percursos na armadura entre os terminais
N = Velocidade (RPM)
Observa-se na expressão acima, que mantendo todas as outras variáveis (p, Ø, Z,
m) fixas, se consegue estabelecer uma relação linear entre velocidade e tensão. É
importante lembrar que para altas velocidades esta linearidade é distorcida devido ao
efeito de saturação.
A figura 1 apresenta o gráfico tensão x velocidade em um
tacogerador.
Figura 1 – Gráfico Tensão X Velocidade em um tacogerador
Algumas exigências são necessárias para que um motor DC funcione como um
tacogerador. São elas: Tensão de saída deve ser estabilizada na faixa operacional e a
saída deve ser estável a variações de temperatura. Os tacogeradores industriais
geralmente incorporam compensação de temperatura através de termistores e fazem uso
de comutador e escovas de prata para melhorar confiabilidade de comutação a baixas
velocidades e a baixas correntes que são típicos desta aplicação. Para combinar alto
desempenho e baixo custo, alguns motores são freqüentemente desenvolvidos para
incorporar um tacogerador montado no eixo do motor e dentro de uma única carcaça
(figura 2).
Figura 2 – Motor e tacogerador em uma mesma carcaça
Encoder
Encoder é um dispositivo eletromecânico que conta ou reproduz pulsos elétricos
a partir do movimento rotacional do eixo. Pode ser definido também como um
transdutor de posição angular.
O encoder gera um pulso para um determinado incremento de rotação do eixo
(encoder rotativo), ou um pulso para uma determinada distância linear percorrida
(encoder linear). Embora seja mais utilizado no controle de posição, o encoder também
é utilizado para medir velocidade, uma vez que medindo a distância total percorrida
(através da contagem dos pulsos na saída do encoder) e o tempo necessário para esta
distância ser percorrida, consegue-se calcular a velocidade. Há vários tipos em uso:
magnético, contacto, resistivo, e óptico. Porém, o sistema mais preciso é o encoder
óptico. Os encoders ópticos operam por meio de um disco com ranhuras ou aberturas
transparentes, que se move entre uma fonte de luz (seja visível ou infravermelha) e um
detector. Este disco é acoplado mecanicamente em um eixo. À medida que o eixo
começa a girar o disco passa entre a fonte e o detector, fazendo com que o feixe de luz
seja interrompido quando encontra uma parte fechada e seja novamente liberado quando
passar por uma abertura transparente, gerando assim uma onda pulsante. A fonte de luz
pode ser um Diodo Emissor de Luz (LED), um diodo infravermelho ou uma pequena
lâmpada incandescente. Já o detector normalmente é um fototransistor ou mais
comumente um diodo fotovoltaico. Esse sistema simples composto por apenas um LED
provê um único sinal de saída o que é indesejável, uma vez que o sinal de saída tem um
offset DC que é dependente da temperatura fazendo com que o sinal fique difícil de ser
usado. Na prática, dois fotodiodos são usados, organizados para produzir sinais com
180° de diferença de fase para cada canal, as duas saídas dos diodos são subtraídas para
cancelar o offset DC (Figura 3).
Figura 3 – Encoder óptico com saída combinada
Esta saída quase senoidal pode ser usada direta sem processamento, porém mais
freqüentemente esta saída passa por um circuito eletrônico onde é amplificada ou usada
para produzir uma onda quadrada (figura 4). Conseqüentemente, os encoders industriais
podem ter como saída, uma onda senoidal ou uma onda quadrada e normalmente até
três canais de saída.
Figura 4 – Estrutura básica de um Encoder
No projeto em questão desenvolveu-se um sistema óptico eletrônico similar ao
mostrado na figura 4. Porém ao invés de se utilizar um disco com ranhuras optou-se em
usar um sensor óptico do tipo reflexivo, sendo que o seu feixe é apontado para o eixo do
motor e toda vez que o motor completa uma volta, um pulso é gerado em sua saída
(figura 5). Este sensor e o circuito eletrônico desenvolvido serão abordados a seguir.
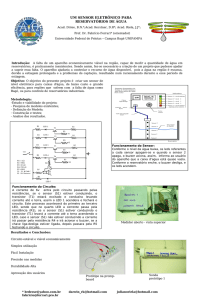
Sensor Óptico Eletrônico de Velocidade
Descrição
O sensor de velocidade desenvolvido é composto por um sensor óptico do tipo
reflexivo e um circuito eletrônico digital. Constitui o sensor reflexivo, um emissor
infravermelho formado por um foto-diodo e um receptor infravermelho constituído por
um foto-transistor. O emissor e o receptor são encapsulados em um mesmo conjunto. O
circuito eletrônico tem como objetivo isolar galvanicamente o sensor óptico do circuito
do controlador, evitando eventuais danos. Outra função deste circuito é converter o
nível de tensão do sensor (normalmente 5 v) em um nível industrial padrão (12 v ou 24
v).
Figura 5 – Estrutura do medidor de velocidade
Princípios de Funcionamento
A maioria dos sensores ópticos do tipo reflexivo existente no mercado, quando
alimentados com uma tensão continua, fornece em sua saída um sinal digital que pode
ser ou VCC ou GND. O que difere em alguns modelos é a lógica de saída que pode ser
DARK ON ou LIGHT ON. Na lógica DARK ON, a saída fornece um sinal lógico “1”
(Vcc) quando nenhum feixe de infravermelho chega ao receptor e gera um sinal lógico
“0” (Gnd) quando algum anteparo reflete o feixe fazendo com que este chegue ate o
receptor. Já na lógica LIGHT ON, o processo se inverte. Visando uma maior
flexibilidade de funcionamento projetou-se o circuito para atender os dois tipos de
lógica de saída. A figura 6 apresenta o esquemático do circuito.
Figura 6 – Esquemático do circuito sensor de velocidade
O circuito deve ser ligado em 5 v para alimentar o sensor óptico e também deve
ser ligado na mesma fonte do controlador (24 v no caso de PLC). O circuito tem como
entrada os sinais de saída dos sensores ópticos e gera como saída os sinais que serão
ligados no cartão de entrada digital do controlador. Como dito anteriormente este
circuito realiza uma isolação galvânica entre o sensor e o controlador. Esta isolação é
realizada através do foto acoplador TIL 111. Quando a parte clara do eixo do motor
(Fig.5) passar pelo sensor, a saída do mesmo (5 V no sensor LIGHT ON e 0 V no
sensor DARK ON) irá gerar uma corrente de aproximadamente 16 mA que circulará
pelo foto diodo do TIL 111, ou seja:
Onde:
Vcc = Tensão de alimentação do sensor = 5 v
Vd = Queda de tensão no diodo = 0,7V
R = Resistor de 270R
Esta corrente (16mA) gera um feixe de infravermelho suficiente para saturar o
foto transistor, e conseqüentemente uma tensão próxima da tensão do controlador (24 v
no caso do PLC) aparece no pino de saída. Quando a parte escura do eixo do motor
(Fig.12) passar pelo sensor, a saída do mesmo (0 V no sensor LIGHT ON e 5 V no
sensor DARK ON) irá interromper a corrente que circulava pelo foto diodo, cessando
assim o feixe de infravermelho e conseqüentemente levando o foto transistor à região de
corte. Uma vez cortado, uma tensão de 0 v irá aparecer na saída devido ao pull down
realizado com o resistor de 2K2. Colocou-se o resistor de 1M na base do foto transistor
(pino 6 do TIL 111) apenas por solicitação do fabricante. À medida que o eixo do motor
vai girando o foto transistor vai cortando e saturando seqüencialmente gerando assim
uma onda quadrada na saída do circuito. Se a rotação do motor permanecer constante
esta freqüência também será constante. Sendo assim fica fácil determinar a velocidade
através do cálculo da freqüência do sinal de saída. A figura 7 mostra o sinal na saída do
circuito sensor de velocidade.
Figura 7 – Sinal na saída do circuito sensor de velocidade
Dado o período do sinal T em segundos, a rotação (velocidade) do motor será:
Onde:
f = freqüência em Hz
N = Velocidade em rpm (rotações por minuto)
O processo descrito anteriormente para o cálculo da velocidade pode ser
facilmente implementado em controladores através do uso de contadores e
temporizadores. A figura 8 apresenta o desenho da placa de circuito impresso do
circuito medidor de velocidade.
Figura 8 – Placa de circuito impresso do sensor de velocidade
Bibliogafia:
- http://vinicius.brasil.vilabol.uol.com.br/eletronica/ele_index.htm
- http://pt.wikipedia.org/wiki/Encoder