Material de apoio: corpo rígido
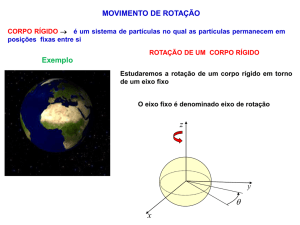
Corpo rígido
sistema que mantêm fixas as distâncias entre as partículas que o
constituiem, mesmo sob a acção de forças e momentos de forças
externos
Tipo de movimento a considerar
translação – todas as partículas descrevem trajectórias rectilíneas
paralelas com a mesma velocidade v
rotação – todas as partículas descrevem trajectórias circulares
em torno do eixo de rotação, com a mesma velocidade angular
combinação dos movimentos de translação e rotação em torno
de um eixo que passa pelo CM
Material de apoio : corpo rígido
Energia cinética do movimento de translação
v
N
N
P mi vi mi v Mv
v vCM
i 1
i 1
P MvCM
CM move-se com a velocidade
comum a todas as partículas
N
1
1
2 1
2
Ek mi vi mi v Mv 2
2 i 1
2
i 1 2
N
1
2
Ek MvCM
2
Nota: as demonstrações são feitas para sistemas discretos; para sistemas contínuos as
demonstrações seriam absolutamente análogas, com os somatórios substituídos por integrais;
por simplicidade omitimos a dependência explícita no tempo das grandezas físicas
Material de apoio: corpo rígido
Energia cinética do movimento de rotação
mi descreve uma trajectória circular com velocidade
angular u z em torno de Oi - ponto de
intersecção do eixo de rotação (eixo dos zz) com
o plano de rotação (plano da trajectória)
vi Ri vi vi ri
z
Ri
O
i
ai
vi
ri
O
x
y
vi ri (ai Ri )
u z (ai u z Ri ) Ri
vi2 2 Ri2 2 d i2
1
1
2
2
Ek mi vi mi d i 2
2 i 1
i 1 2
N
N
N
I mi d i2
i 1
momento de inércia referido
ao eixo de rotação
distância ao eixo de rotação
1
2
Ek I
2
Material de apoio : corpo rígido
Energia cinética do movimento combinado
translação relativamente a um sistema exterior S , com velocidade vCM
rotação em torno de um eixo que passa pelo CM , com velocidade
'
angular
ri ri rCM
CM '
'
ri
vi vi vCM
rCM
N
1
Ek mi vi2
i 1 2
s
ri
velocidade da partícula i em S
velocidade da partícula i em S’
– referencial do CM
N
2
'
1
1N
2
mi v'i mi vi vCM mi vCM
2
2 i 1
i 1
i 1
1
0
M
I 2
1
2
N
1
2
MvCM
2
2
Ek rot ação Ek translação
Ek
energia cinética no referencial do CM, onde
o objecto só tem movimento de rotação
I 2
Material de apoio: corpo rígido
Cálculo dos momentos de inércia em casos simples
z
m3
v2 m
O2
O1
distância ao eixo é
d i Ri
2
R2
R1 m1
v1
mi (i=1,2) descrevem trajectórias circulares com
velocidade angular
u z em torno de Oi
que é constante
m3 em repouso sobre o eixo de rotação
a distância ao eixo é
d3 0
y
x
xi2 yi2
que é constante
3
I mi d i2 m1d12 m2 d 22
i 1
Material de apoio: corpo rígido
Cálculo dos momentos de inércia em casos simples
disco homogéneo de raio R, roda no plano
xy, em torno do eixo dos zz
cada dm descreve um trajectória circular
no plano xy, em torno do ponto O, com a
velocidade u z
distância de cada dm ao eixo
z
O
x
r
R
dm y
d x2 y2
R
r cos 2 r sin 2
I d dm d dS r rd dr r dr
2
2
2
1 4
1
1
2
2
R 2
R R MR 2
4
2
2
0
3
2
0
r
d
I
1
MR 2
2
Material de apoio: corpo rígido
Cálculo dos momentos de inércia em casos simples
z
disco homogéneo de raio R, roda em
torno do eixo dos zz que pertence ao seu
plano e passa pelo seu centro
cada dm descreve um trajectória circular
num plano paralelo ao plano xy, com a
velocidade
u z
distância de cada dm ao eixo é fixa e
pode ser calculada quando se encontra no
plano yz d y 2 r cos 2
R
dm
r
O
y
x
R
I d dm d dS r cos rd dr r dr
2
2
2
2
1 4
1
1
R
R 2 R 2 MR 2
4
4
4
0
3
2
0
cos 2 d
1
I MR 2
4
Material de apoio: corpo rígido
Cálculo dos momentos de inércia em casos simples
z
b
O
x
r
placa homogénea de dimensões a e b,
roda no plano xy, em torno do eixo dos zz
cada dm descreve um trajectória circular
no plano xy, em torno do ponto O, com a
velocidade
u z
distância de cada dm ao eixo d x 2 y 2
dm y
a
I d 2 dm d 2 dS x 2 y 2 dxdy
a 2
b 2
a 2
b 2
dx
dy dx
y 2 dy
a 2
b 2
a 2 b 2
b 2
3
1 3 a 2 b 2
a3
b
a 2 1 3
x
y b 2 x a 2 y
ba
3
a 2
3
3
4
4
b
2
M 2
M 2
a b2
I
a b2
12
12
Material de apoio: corpo rígido
Cálculo dos momentos de inércia em casos simples
placa homogénea de dimensões a e b, roda
em torno do eixo dos zz que pertence ao seu
plano e passa pelo seu centro
cada dm descreve um trajectória circular num
plano paralelo ao plano xy, com a velocidade
u z
distância de cada dm ao eixo é fixa e pode ser
calculada quando se encontra no plano yz
z
r
b
dm
y
x
a
d
y2
I d dm y dS y dx dy
2
2
2
a 2
dx
a 2
x a
a 2
1 3
y
2
3
b 2
b 2
b 2
b 2
y 2 dy
1
1
ab b 2 M b 2
ab 3
12
12
12
M 2
I
b
12
Material de apoio: corpo rígido
Teorema dos eixos paralelos
z
z’
D
I I CM MD 2
momento de inércia relativo ao eixo
paralelo ao eixo que passa pelo CM
CM
x’
y’
momento de inércia relativo eixo
que passa pelo CM
x
x' xCM
I d 2 dm x 2 y 2 dm
y
O
distância entre
os dois eixos
2 y ' yCM 2 dm
2
2
x'2 y '2 dm 2 xCM x' dm 2 yCM y ' dm xCM
yCM
dm
2
ICM
M
0
D
0
I CM MD 2
Material de apoio : corpo rígido
Equações do movimento
taxa de variação do momento linear
dvCM
dP
P mi vi MvCM
M
Fi MaCM
ext
dt
dt
i 1
i
dP
Fiext dt MaCM
i
N
resultante das forças externas
a taxa de variação do momento linear do corpo rígido é determinada pela
resultantes das forças externas
a aceleração do CM do corpo rígido é determinada pela resultante das
forças externas
Nota: a resultante é independente do ponto de aplicação das forças
Material de apoio : corpo rígido
Equações do movimento
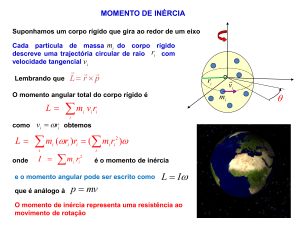
taxa de variação do momento angular
dL
L mi ri vi
Ni
ext
dt
i 1
i
dL
N iext dt
i
N
momento resultante das forças externas
a taxa de variação do momento angular do corpo rígido é determinada
pelo momento resultante das forças externas
Nota: o momento resultante dependente do ponto de aplicação das forças
Material de apoio : corpo rígido
Equações do movimento
taxa de variação do momento angular
corpo plano que roda em torno de um
z
eixo que lhe é perpendicular com
Li
velocidade angular u z
cada dm descreve um movimento
r
O i
circular em torno de O com u z
vi
2
Li mi ri vi mi ri vi sin u z mi d i
2
r
r d
i
2
L Li mi di I
i
i
dL
d
Ni
I
I
ext
dt
dt
i
i
aceleração angular
i
Ni
i
ext
L I
dL
I
dt
a aceleração angular do corpo rígido é determinada pelo momento
resultante das forças externas
Material de apoio : corpo rígido
Equações do movimento
taxa devariação do momento angular
corpo de forma arbitrária (3 dimensões)
que roda em torno de um eixo com
velocidade angular u z
cada dm descreve um movimento
circular num plano paralelo ao plano xy
em torno de Oi com u z
z
Oi Ri
Li
vi
ri
O
vi ri vi ri vi
Li mi ri vi Li ri Li vi
2
Li mi di L I
Ni
i
ext
E
dL
I
dt
Material de apoio : corpo rígido
MAS – a componente z do momento angular ainda é proporcional
a
z
Oi Ri
Li
vi
i
Li
Li cos i
2
m rv
ii i
sin
i
mi ri vi sin i mi ri sin i
vi
Ri ri sin i
Li z Li u z
ri
mi Ri2 mi d i2
di2
O
z
Lz Li mi di2 I
z
i
N i ext z
i
NOTA:
Lz I
i
dLz
d
I
I
dt
dt
Ni ext z
i
dLz
I
dt
Li ( Lz ) é independente do ponto do eixo de rotação em relação ao qual o
z
momento angular é calculado
Material de apoio : corpo rígido
SE o sistema rodar em torno de um eixo principal de inércia (eixo
de simetria do corpo) tem-se ainda
L I
Ni
i
ext
dL
I
dt
Nota: a aceleração angular terá a mesma direcção e sentido da velocidade angular,
se a velocidade angular mantiver constante a sua direcção e sentido:
sistema roda em torno de um eixo fixo (apenas movimento de rotação)
sistema roda em torno de um eixo com movimento de translação (movimento
combinado de translação e rotação)
Material de apoio : corpo rígido
Rolamento – não derrapagem: 1º exemplo
condição de não derrapagem: ponto de contacto em repouso
relativamente à superfície de contacto
condições iniciais
CM
P
y
z
x
Fat
R
Ν
C - ponto de contacto
vCM (0) v0 v0u x
(0) 0
movimento inicia-se com o movimento
de translação através da comunicação
de vCM (0) v0
força de atrito estabelece-se e contraria
o movimento de translação
1ª equação do movimento – movimento de translação
força de atrito confere aceleração de translação que faz diminui a velocidade
de translação
R Fi ext
P
N Fat mgu x MaCM aCM gu x
i
0
Nux
vCM (t ) v0 aCM t v0 gt u x
Material de apoio : corpo rígido
Rolamento – não derrapagem: 1º exemplo
2ª equação do movimento – movimento de rotação em torno de um
eixo principal de inércia: eixo de simetria que passa pelo CM (eixo
dos zz)
N Ni ext I
i
relativamente ao CM
N N i ext
i
N P
N N
N F
at
0( mgu y ) ( Ru y )( mgu y )0 ( Ru )( mgu )
y
x
Rmg
Rmgu z I
uz
I
força de atrito: única força que tem momento não nulo única força que
confere a aceleração angular que põe o corpo a rodar
Rmg
(t ) t
t uz
I
Material de apoio : corpo rígido
Rolamento – não derrapagem: 1º exemplo
cada ponto tem velocidade de translação e velocidade de rotação
vP (t ) vCM (t ) vrot (t ) vCM (t )u x (t )u z rP
P
CM
rC
y
z
x
vrot
C
R
vCM
vC (t ) vCM (t )u x (t )u z ( Ru y )
vCM (t ) R (t ) u x
C - ponto de contacto
Condição de não derrapagem cumprida em t trol
vC (trol ) 0 vCM (trol ) R (trol ) u x 0 vCM (trol ) R (trol )
R 2 mg
v0 gt rol
t rol
I
vCM (trol )
R (trol )
t rol
v0
R 2m
g 1
I
Material de apoio : corpo rígido
Rolamento – não derrapagem: 1º exemplo
N e P não realizam trabalho
para t trol a força de atrito não realiza trabalho: ponto de
aplicação em repouso relativamente ao solo energia mecânica
conserva-se E E 0 E constante
k
1
1
2
mvCM
I
2
2
v
k
2
CM
R
2
1
I
2
mvCM
1
constante
2
2
R
vCM R constante
movimento continuaria ideal e indefinidamente com
vCM (t rol ) v0 gt rol
Rmg
(t rol )
t rol
I
Exemplo: lançamento de uma bola de bowling
Material de apoio : corpo rígido
Rolamento – não derrapagem: 2º exemplo
condição de não derrapagem: ponto de contacto em repouso
relativamente à superfície de contacto
CM
P
y
z
x
R
Ν
Fat
C - ponto de contacto
condições
iniciais
(0) 0 0u z
vCM (0) 0
movimento inicia-se com o movimento
de rotação através da comunicação de
(0) 0
força de atrito estabelece-se e contraria
o movimento de rotação
1ª equação do movimento – movimento de translação
R Fi ext
P
N Fat mgu x MaCM aCM gu x
i
0
Nux
vCM (t ) aCM t gt u x
corpo adquire movimento de translação sob a acção da força de atrito
Material de apoio : corpo rígido
Rolamento – não derrapagem: 2º exemplo
2ª equação do movimento – movimento de rotação em torno de um
eixo principal de inércia: eixo de simetria que passa pelo CM (eixo
dos zz)
relativamente ao CM
N N i ext
i
N P
N N
0( mgu y ) ( Ru y )( mgu y )0 ( Ru
N F
at
)
(
mg
u
)
y
x
Rmg
Rmgu z I
uz
I
força de atrito: única força com momento não nulo única força que
confere a aceleração angular que vai diminuir a velocidade angular inicial
(t ) (0) t 0
Rmg
t uz
I
Material de apoio : corpo rígido
Rolamento – não derrapagem: 2º exemplo
cada ponto tem velocidade de translação e velocidade de rotação
vP (t ) vCM (t ) vrot (t ) vCM (t )u x (t )u z rP
P
CM
rC
y
z
x
vrot
C
R
vCM
vC (t ) vCM (t )u x (t )u z ( Ru y )
vCM (t ) R (t ) u x
C - ponto de contacto
Condição de não derrapagem cumprida em t trol
vC (trol ) 0 vCM (trol ) R (trol ) u x 0 vCM (trol ) R (trol )
Rmg
gt rol R 0
t rol
I
vCM (trol )
(trol )
t rol
R 0
R 2m
g 1
I
Material de apoio : corpo rígido
Rolamento – não derrapagem: 2º exemplo
N e P não realizam trabalho
para t trol a força de atrito não realiza trabalho: ponto de
aplicação em repouso relativamente ao solo energia mecânica
conserva-se E E 0 E constante
k
1
1
2
mvCM
I
2
2
v
k
2
CM
R
2
1
I
2
mvCM
1
constante
2
2
R
vCM R constante
movimento continuaria ideal e indefinidamente com
vCM (t rol ) gt rol
(trol ) 0
Rmg
t rol
I
Exemplo: roda que é posta a rodar e depois colocada numa superfície
horizontal, sem lançamemto (sem velocidade de translação)
Material de apoio : corpo rígido
Rolamento – não derrapagem: 3º exemplo
condição de não derrapagem: ponto de contacto em repouso
relativamente à superfície de contacto
y
z
x
Fat
CM
P
Ν
C - ponto de contacto
R
condições
iniciais
vCM (0) 0
(0) 0
movimento inicia-se com o movimento
de translação sob a acção do peso
força de atrito estabelece-se e contraria
o movimento de translação
1ª equação do movimento – movimento de translação
R Fi ext P N Fat maCM
i
mg sin N u x N mg cos u y
maCM
aCM g sin cos u x
0
maCM u x
vCM (t ) g sin cos tu x
Material de apoio : corpo rígido
Rolamento – não derrapagem: 3º exemplo
2ª equação do movimento – movimento de rotação em torno de um
eixo principal de inércia: eixo de simetria que passa pelo CM (eixo
dos zz)
relativamente ao CM
N N i ext
i
N P
N N
0( mgu y ) ( Ru y )(N u y )0 ( Ru
N F
at
)
(
N
u
)
y
x
Rmg
Rmgu z I
uz
I
força de atrito: única força com momento não nulo única força que
confere a aceleração angular que põe o corpo a rodar
(t ) t
Rmg
t uz
I
Material de apoio : corpo rígido
Rolamento – não derrapagem: 3º exemplo
cada ponto tem velocidade de translação e velocidade de rotação
vP (t ) vCM (t ) vrot (t ) vCM (t )u x (t )u z rP
y
P
z
CM
x
vrot
C
C - ponto de
contacto
rC
vCM
R
vC (t ) vCM (t )u x (t )u z ( Ru y )
vCM (t ) R (t ) u x
condição de não derrapagem cumprida para t se
vC (t ) 0 vCM (t ) R (t ) u x 0
R 2 mg
g sin cos t
t
I
vCM (t ) R (t ) t
tan
2
1 mR
I
Material de apoio : corpo rígido
Rolamento – não derrapagem: 3º exemplo
N não realiza trabalho
P realiza trabalho mas é conservativa
se se cumprir a condição de não derrapagem, a força de atrito não
realiza trabalho: ponto de aplicação em repouso relativamente ao
solo para todo o t energia mecânica conserva-se
E 0 Ek E p constante
1
1
2
mvCM
I
2
2
v
2
CM
R
2
mgh
1
I
2
mvCM
1 2 mgh constante
2
R
a energia cinética aumenta, vCM aumenta, enquanto a energia potencial
diminui, h (altura da bola) diminui
Exemplo: bola de bowling largada no topo de um plano inclinado