Material de apoio: cinemática
z (t )
S
r (t )
ux
x (t )
uz
P
uy
y (t )
O
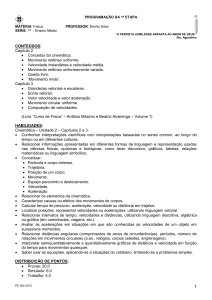
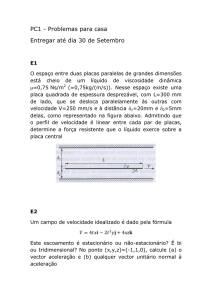
r ( t ) x ( t ) u x y ( t )u y z ( t ) u z
Vector posição do ponto P
x (t )
y (t )
z (t )
Componentes do vector posição
Coordenadas do ponto P
Dimensões : L
Unidades SI : m
Material de apoio: cinemática
vector velocidade
dr (t )
v (t )
dt
v x (t )u x v y (t )u y v z (t )u z
v (t ) v(t )uT (t )
norma de v (t )
v(t ) v2x (t ) v2y (t ) v2z (t )
dx
v x (t ) dt (t )
dy
(t )
v y (t )
dt
dz
v z (t ) dt (t )
versor tangente à trajectória:
• norma unitária
•direcção da tangente à trajectória
•sentido do movimento
Dimensões : LT-1
Unidades SI : m s-1
Material de apoio: cinemática
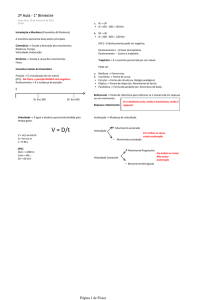
Movimento
curvilíneo geral
ur
u
dr ur
d
r'
O
dr (t )
rd u
dr dr ur rd u
dr
dr
d
v (t )
(t )
(t ) ur (t ) r (t )
(t ) u (t )
dt
dt
dt
vr (t )
v (t )
Material de apoio: cinemática
uT (t1 )
r (t1 )
r (t2 )
O
uT (t )
uN (t )
versor tangente à trajectória
r
r (t3 )
dr
(t )
uT (t ) dt
dr
(t )
dt
versor normal principal à trajectória
du T
(t )
u N (t ) dt
du T
(t )
dt
Material de apoio: cinemática
raio
de curvatura
v(t )
(t )
duT
(t )
dt
centro de curvatura rc (t ) r (t ) (t )uN (t )
( t )u N ( t )
r (t )
O
rc (t )
c
Material de apoio: cinemática
vector aceleração
2
dv
d r
a (t )
(t ) 2 (t )
dt
dt
a x (t )u x a y (t )u y a z (t )u z
dv x
d 2x
(t ) 2 (t )
a x (t )
dt
dt
dv y
d2y
(t ) 2 (t )
a y (t )
dt
dt
dv z
d 2z
(t ) 2 (t )
a z (t )
dt
dt
componentes tangencial e normal, ou centrípeta
a (t ) aT (t ) a N (t )
aT (t )uT a N (t )uN
dv
aT (t ) dt (t )
2
v
a (t ) (t )
N
(t )
Dimensões : LT-2
Unidades SI : m s-2
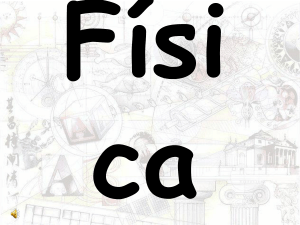
Material de apoio: cinemática
Movimento
curvilíneo geral
aT (t )
v (t )
a (t )
r (t )
O
a N (t )
Material de apoio: cinemática
movimento uniforme – norma da velocidade constante
aT (t ) 0
movimento rectilíneo – direcção da velocidade constante
a N (t ) 0
Material de apoio: cinemática
Movimento rectilíneo – requer apenas um eixo coordenado
com a direcção do movimento
v (t )
u x uT ur
independente do tempo
r (t ) x(t )u x x(t )uT
v (t ) v(t )u x vT (t )uT vr (t )ur
a (t ) a(t )u a (t )u
x
T
T
Material de apoio: cinemática
Movimento circular : r (t ) r , t - independente do tempo
y
v (t )
velocidade angular
aT (t )
ds
d
a (t )
(t )
(t )
a N (t )
dt
d
ds r d
r (t )
x
ds
d
(t ) r
(t ) v(t ) r (t )
dt
dt
norma da velocidade
Dimensões : T-1
Unidades SI : rad s-1
Material de apoio: cinemática
Movimento circular : r (t ) r , t - independente do tempo
y
vector velocidade angular
v (t )
• norma : (t ) (t )
r (t )
• direcção do eixo de rotação – eixo zz
perpendicular a r (t ) e v (t )
z
• sentido do eixo zz se movimento no sentido directo
sentido oposto ao eixo zz se movimento no sentido retrógrado
v (t ) v (t )u (t ) (t ) r (t )
r (t ) r dr 0 vr 0
x
Material de apoio: cinemática
Movimento circular : r (t ) r , t - independente do tempo
vector aceleração angular
d
(t )
(t )
dt
Dimensões : T-2
Unidades SI : rad s-2
relação entre as acelerações linear e angular
dv
d (t ) r (t )
a (t )
(t )
(t ) r (t ) (t ) v (t )
dt
dt
• aceleração tangencial
aT (t ) aT (t )uT (t )
dv
(t )uT (t )
dt
(t ) r (t )
• aceleração normal
a N (t ) a N (t )u N (t )
v(t ) 2
(t )u N (t )
r
(t ) v (t )
Material de apoio: cinemática
cálculo de r (t ) a partir v (t )
1 condição inicial : r (t0 )
t
r (t ) r (t0 ) v (t ' )dt '
t0
cálculo de v (t ) a partir a (t )
t
v (t ) v (t0 ) a (t ' )dt '
1 condição inicial : v (t0 )
t0
cálculo de r (t ) a partir a (t )
t t'
'
r (t ) r (t0 ) v (t0 )(t t0 ) ' a (t ' ' )dt ' 'dt '
t0 t0
'
2 condições iniciais : r (t0 ) ; v (t0 )
Material de apoio: cinemática
Movimento com velocidade constante: independente do tempo
t
r (t ) r (t0 ) v (t ' )dt '
v (t ) v
t
t0
t
v dt ' v dt ' v t t0
t0
t0
r (t ) r (t0 ) v t t0
r (t ) r (t0 ) v t t0 r (t ) r (t0 ) v t t0
r (t ) r (t0 )
r (t0 )
O
r (t )
S vt
espaço percorrido é igual ao produto
da norma da velocidade pelo tempo
que demora a percorrê-lo
Material de apoio: cinemática
Movimento com norma da velocidade constante:
independente do tempo
v (t ) v(t ) v
t
dS
(t ) v(t ) S (t ) S (t0 ) v(t ' )dt '
t0
dt
t0vdt' v t0dt ' vt t
t
t
0
S (t ) S (t0 ) vt t0
S vt
espaço percorrido é igual ao produto
da norma da velocidade pelo tempo
que demora a percorrê-lo
Material de apoio: cinemática
Movimento com aceleração constante: independente do tempo
a (t ) a
t
t
v (t ) v (t0 ) a (t ' )dt '
t
adt ' a dt ' a t t0
t0
t0
variação do vector velocidade é
igual ao produto da aceleração pelo
intervalo de tempo correspondente a
essa variação
t0
v (t ) v (t0 ) a t t0
v a t
Material de apoio: cinemática
Movimento com aceleração constante: independente do tempo
a (t ) a
t t'
r (t ) r (t0 ) v (t0 ' )(t t0 ) ' a (t ' ' )dt ' 'dt '
t0 t0
t'
t'
' '
adt ' ' a ' dt ' ' a (t t0 )
'
t0
t0
t
t0
' '
t '
' t
1 2 1 2 '
a (t t0 )dt ' a t dt ' at0 dt ' a 2 t 2 t0 at0 t t0
t0
t0
1 2 1 2 '
r (t ) r (t0 ) v (t0 ' )(t t0 ) a 2 t 2 t0 at0 t t0
condições iniciais conhecidas no mesmo instante de tempo: t0 t0'
1
r (t ) r (t0 ) v (t0 )(t t0 ) 2 a t t0 2
Material de apoio: cinemática
Movimento com aceleração constante: independente do tempo
1 2 1 2 '
r (t ) r (t0 ) v (t0 ' )(t t0 ) a 2 t 2 t0 at0 t t0
1
r (t ) r (t0 ) v (t0 )(t t0 ) 2 a t t0 2
t0 t0'
a e v0 paralelos - trajectória rectilínea com a direcção de a e v0
a e v0 não paralelos - trajectória parabólica descrita no plano
formado por a e v0 e que passa por r0
'
r0 r (t0 ) ; v0 v (t0 ) ou v0 v (t0 )
Movimento de projécteis: a g independente do tempo
Material de apoio: cinemática
S z
Movimento relativo
vector posição relativa
rA (t )
rBA rB rA rAB
B relativamente a A
A relativamente a B
A
rBA (t )
rB (t )
O
x
B
y
vector velocidade relativa
drBA
v BA
vB v A v AB
dt
B relativamente a A
A relativamente a B
vector aceleração relativa
a BA
B relativamente a A
dvBA
aB a A a AB
dt
A relativamente a B
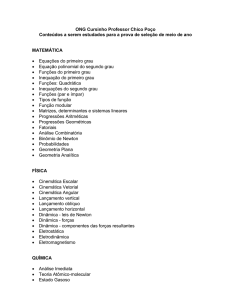
Material de apoio: cinemática
Transformadas de Galileu
S’ y’
S
y
P
r , (t )
r (t )
rO, (t )
O’
z’
O
x
z
Velocidade de S’ relativamente
aS
constante
x’
ro, (t ) Vt
t , t
,
r (t ) r (t ) Vt
,
v (t ) v (t ) V
,
a
(
t
)
a
(t )
Distâncias são invariantes
Intervalos de tempo são invariantes
Princípio da relatividade de Galileu
Leis da Mecânica são invariantes:
as mesmas em todos os referenciais inerciais
Todos os referenciais inerciais são equivalentes