UNIVERSIDADE DO ESTADO DE SANTA CATARINA
CENTRO DE CIÊNCIAS TECNOLÓGICAS
DEPARTAMENTO DE ENGENHARIA ELÉTRICA
LABORATÓRIO DE SISTEMAS DE CONTROLE II
5 DISCRETIZAÇÃO DE SISTEMAS CONTÍNUOS
5.1
Discretização de Plantas Contínuas Descritas por Função de
Transferência
No Controle Digital de Processos, sempre nos deparamos com a situação apresentada
na Figura 5.1 abaixo:
Figura 5.1 - Configuração Típica de uma Planta Contínua no Mundo Digital
A Função de Transferência Discreta desse sistema pode ser determinada exatamente através
da expressão:
Y ( z)
−1
H ( z ) = U ( z ) = (1 − z ) Z [ y d ( kT )]
onde
G ( s)
y d (t ) = L−1 [
]
s
Dados G(s) e T, o comando do Matlab c2dm, no modo ‘zoh’, calcula a função de
transferência discreta H(z) acima (o modo ‘zoh’ - zero order hold - é assumido par default). A
seguir são mostrados exemplos com diferentes períodos de amostragem.
>> num = [0 0 1]; den = [1 0.2 1.01];
>> printsys(num, den, ‘s’)
>> subplot(221), step(num, den)
>> T = 0.3;
>> [numd dend] = c2dm(num, den, T);
>> printsys(numd, dend, ‘z’)
>> subplot(222), dstep(numd, dend)
>> T = 1;
>> [numd dend] = c2dm(num, den, T);
>> printsys(numd, dend, ‘z’)
>> subplot(223), dstep(numd, dend)
>> T = 3;
>> [numd dend] = c2dm(num, den, T);
>> printsys(numd, dend, ‘z’)
>> subplot(224), dstep(numd, dend)
% Definição da Função de Transferência (FT)
% Exibição da FT
% Resposta ao degrau da FT
% Período de Amostragem T = 0.3 s
% FT discretizada com zero order hold
% Exibição da FT discretizada
% Resposta ao degrau da FT discretizada
% Período de Amostragem T = 1 s
% FT discretizada com zero order hold
% Exibição da FT discretizada
% Resposta ao degrau da FT discretizada
% Período de Amostragem T = 3 s
% FT discretizada com zero order hold
% Exibição da FT discretizada
% Resposta ao degrau da FT discretizada
LABORATÓRIO DE SISTEMAS DE CONTROLE II
2
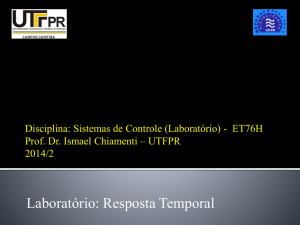
Figura 5.2 - Respostas ao degrau de um sistema discretizado para diversos períodos de amostragem
Observe na Figura 5.2 como um período de amostragem mal dimensionado pode degradar a
resposta do sistema discretizado.
5.2
Discretização de Plantas Contínuas no Espaço de Estados
Semelhantemente, se a planta é descrita no espaço de estados por:
x& (t ) = Ax (t ) + Bu (t )
y (t ) = Cx (t ) + Du (t )
o sistema de tempo discreto equivalente será expresso por
x k +1 = Ad x k + B d u k
y k = Cx k + Du k
onde xk = x(kT), Ad = eAT e Bd = [eAT –I]A-1B, sendo T o período de amostragem. O
Matlab implementa essa transformação através do comando c2d.
>> % Obtenção da planta descrita no espaço de estados
>> [A B C D] = tf2ss(num, den)
% Contínua
>> T = 1;
>> [Ad Bd] = c2d(A, B, T)
% Discretizada
>> % Comparação das respostas da discretização no domínio da freqüência e domínio do tempo para T=1s
>> [numd dend] = c2dm(num, den, T)
>> subplot(121), dstep(numd, dend)
% Resposta ao degrau da discretização no domínio da freqüência
>> subplot(122), dstep(Ad, Bd, C, D)
% Resposta ao degrau da discretização no domínio do tempo
Note que as matrizes C e D não são necessárias como entradas para c2d. As matrizes C e D
são as mesmas no sistema contínuo e no sistema discretizado.
LABORATÓRIO DE SISTEMAS DE CONTROLE II
3
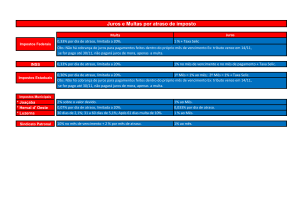
Figura 5.3 - Respostas ao degrau de um sistema discretizado para T=1s.
a) no domínio da freqüência; b) no domínio do tempo (resultados iguais)
5.3
Discretização de Plantas Contínuas com Atraso Puro
Muitos sistemas apresentam atrasos puros devido a atrasos de transporte e atrasos
devidos ao processamento do controle digital, como ilustra a figura 5.4 abaixo:
Figura 5.4 - Configuração Típica de Planta + atraso em Controle Digital
Neste caso a função de transferência discreta será dada por
Y ( z)
−1
H λ ( z ) = U ( z ) = (1 − z ) Z [ y d ( kT − λ )]
onde
G ( s)
y d (t ) = L−1 [
]
s
O Matlab não realiza essa transformação no domínio da freqüência, mas apenas no
espaço de estados através do comando c2dt (a matriz D do sistema contínuo é suposta nula). O
comando c2dt utiliza as matrizes A, B e C, gerando At, Bt, Ct e Dt do sistema discretizado.
>> % Resposta do Sistema com atraso puro para T=1s
>> lambda=5.5;
>> % Determinação de Hλ(z)
>> [Ad1, Bd1, Cd1, Dd1] = c2dt(A, B, C, T, lambda);
>> [numd1, dend1] = ss2tf(Ad1, Bd1, Cd1, Dd1);
>> subplot(121), dstep(numd, dend, 50)
>> subplot(122), dstep(numd1, dend1, 50)
>> printsys(numd1, dend1, ’z’)
% Atraso = 5,5 X período de amostragem
% Discretização no espaço de estados atraso puro
% Espaço de Estados → Função de Transferência
% Resp. degrau - Discretização sem atraso puro
% Resp. degrau - Discretização com atraso puro
LABORATÓRIO DE SISTEMAS DE CONTROLE II
4
Analise a função de transferência Hλ(z) obtida e explique o aparecimento de
coeficientes nulos no seu denominador.
>> Dimensões de A e Ad1
>> size(A)
>> size(Ad1)
Explique a diferença de ordem das matrizes A e Ad1, relacionando com as ordens dos
polinômios dend e dend1.
Figura 5.5 - Respostas ao degrau de um sistema discretizado para T=1s.
a) sem atraso puro; b) com atraso λ = 5,5s.
No caso do atraso λ ser decorrente apenas de atraso de processamento devido ao
controle digital, λ < T. Repita as operações anteriores para λ = 0,5.
>> lambda=0.5;
>> % Determinação de Hλ(z)
>> [Ad2, Bd2, Cd2, Dd2] = c2dt(A, B, C, T, lambda);
>> [numd2, dend2] = ss2tf(Ad2, Bd2, Cd2, Dd2);
>> % Comparação entre as respostas da planta sem e com atraso puro
>> subplot(121), dstep(numd1, dend1, 50)
>> subplot(122), dstep(numd2, dend2, 50)
>> printsys(numd2, dend2, ’z’)
Compare as respostas ao degrau dos dois sistemas e justifique com base nas respectivas FT´s.
5.4
Pólos Contínuos Versus Pólos Discretos
A relação entre os pólos contínuos e os pólos dos sistemas discretizados vale z = esT.
Vamos verificar essa relação usando o Matlab.
>> pol_disc = roots(dend)
>> pol_dis1 = roots(dend1)
>> pol_dis2 = roots(dend2)
>> pol_cont = roots(den)
>> Transf = exp(pol_cont*T)
% calcula pólos do sistema discretizado por c2dm
% calcula pólos do sistema discretizado por c2dt com λ = 5,5
% calcula pólos do sistema discretizado por c2dt com λ = 0,5
% calcula pólos do sistema contínuo
% Verifique a relação z = exp(sT)