CAPÍTULO 5. MECÂNICA
5.4. DEFORMAÇÃO ELÁSTICA E INELÁSTICA DE CORPOS
B
B
h
h
v0
A
A
-v0
Figura 5.12: Conservação da energia mecânica
O ponto de altura máxima é denominado de ápice e no instante em que o objecto atinge-o tem
velocidade nula. O que é que aconteceu à energia cinética do objecto? Ela não se perdeu, transformouse em energia potencial gravítica. A transformação foi total porque a energia cinética foi a zero no
ápice e quando o objecto regressar ao ponto de partida terá a mesma energia cinética que tinha no
início (terá uma velocidade v0 ).
Dizemos que há conservação da energia mecânica. Ou seja a quantidade EC + EP mantém-se
constante:
(5.9)
(EM )IN ICIAL = (EM )F IN AL
No início (ponto de lançamento) a energia potencial gravítica é nula porque a altura é zero e no
fim (ápice) a velocidade é nula, logo:
1
mv 2 + 0 = 0 + mghmax
2 0
Ou seja o projéctil vai atingir uma altura igual a v0/2g.
Podemos também observar que a proporcionalidade directa entre a energia potencial e a altura
implica (ver equação 5.8) que a 10% da altura máxima teremos 10% da energia potencial gravítica
máxima (igual à energia mecânica). A restante energia terá que estar sob a forma de energia cinética
(90% da energia mecânica) de forma que a soma tenha sempre o mesmo valor.
Por exemplo, se um objecto com 0.5 kg de massa é lançado na vertical com uma energia mecânica
de 5 J:
2
h (m)
0.0
0.2
0.4
0.6
0.8
1.0
h/hmax
(%)
0
20
40
60
80
100
EC (J)
5
4
3
2
1
0
EC/EM
(%)
100
80
60
40
20
0
EP (J)
0
1
2
3
4
5
EP /EM
(%)
0
20
40
60
80
100
Tabela 5.2: Energias cinética e potencial ao longo de uma trajectória vertical
5.4
Deformação elástica e inelástica de corpos
Uma mola é um dispositivo que tem a capacidade de armazenar energia mecânica. A mola caracteriza-se
por opor-se a deformações.
Consideremos uma mola linear (ver figura 5.13). Quando sujeita a uma deformação (compressão
ou extensão) ao longo do seu eixo (longitudinal), a mola resiste a essa deformação produzindo uma
força em igual direcção mas em sentido contrário.
27
5.4. DEFORMAÇÃO ELÁSTICA E INELÁSTICA DE CORPOS
CAPÍTULO 5. MECÂNICA
x
F
x
F
Figura 5.13: Mola linear
A força de retorno F~ é tanto maior quanto maior for a deformação
duas grandezas são directamente proporcionais:
F~ =
k ~x
~x. A lei de Hooke diz que as
(5.10)
O sinal de
indica que os sentido da força e da deformação são contrários. A constante k é
designada de constante de elasticidade da mola e é uma medida da rigidez da mola. Se analisarmos a
equação 5.10 de outra forma:
F~
k=
k ~xk
(5.11)
verificamos que se temos duas molas sujeitas à mesma deformação k ~xk, terá maior constante de
elasticidade a que oferecer maior força de retorno F~ .
x
F1
x
F2
Figura 5.14: Deformação igual
Por outro lado, se aplicarmos a mesma força F~ a duas molas, terá maior constante de elasticidade
a que sofrer menor deformação k ~xk.
28
CAPÍTULO 5. MECÂNICA
5.4. DEFORMAÇÃO ELÁSTICA E INELÁSTICA DE CORPOS
x1
F
x2
F
Figura 5.15: Força igual
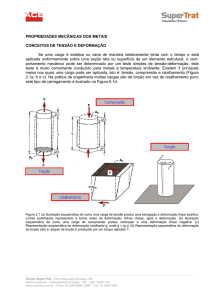
Quando são sujeitos a uma força, os ossos exibem um comportamento semelhante ao de uma mola.
No entanto a deformação sofrida não é apenas segundo uma direcção como acontecia com a mola
linear. Por exemplo, quando se aplica uma força num cilindro ao longo da sua geratriz (ver figura 5.16),
para além da deformação na direcção da compressão, há deformação noutras direcções.
F
a
b
c
Figura 5.16: Compressão de um cilindro
Na figura 5.16 vemos 3 exemplos de possíveis deformações. Consideremos a situação a. À medida
que há compressão, o comprimento l (altura do cilindro) diminui e a área de secção recta A aumenta:
torna-se mais difícil comprimir o cilindro. Ou seja, a constante de elasticidade aumenta com um
aumento da área de secção recta:
k/A
e aumenta com a diminuição do comprimento:
k/
1
l
Podemos então generalizar a equação da lei de Hooke (5.10) para os ossos:
✓
◆
A
F = Y
· l
l
(5.12)
em que Y é uma constante chamada módulo de Young em homenagem ao médico e físico do século
XIX, Thomas Young.
Se modificarmos a equação anterior:
=
F
l
=Y
A
l
29
(5.13)
5.4. DEFORMAÇÃO ELÁSTICA E INELÁSTICA DE CORPOS
CAPÍTULO 5. MECÂNICA
podemos constatar que Y tem unidades de pressão. Esta constante representa a rigidez dos ossos
e depende unicamente da sua constituição:
material
fémur humano (cortical)
colagénio
cristais de sais de Ca
Y (GPa)
17.9 ± 3.9
1.2
165
Tabela 5.3: Valores do módulo de Young
Veremos mais tarde que nos fluidos a pressão faz-se sentir igualmente em todas as direcções. Tal
não acontece necessariamente nos sólidos e por isso neste caso a pressão tem a designação mais geral
de tensão .
A variação relativa do comprimento (" = l/l) designa-se de deformação e a equação 5.13 diz
apenas que a tensão e a deformação são directamente proporcionais (é conhecida como a relação
tensão-deformação):
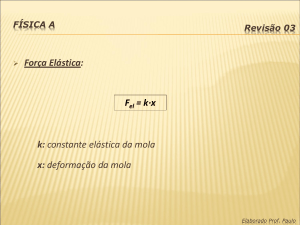
100
σ
MPa
50
0.5
1.0
1.5 ε/%
Figura 5.17: Tensão em função da deformação para a compressão do fémur humano [3]
Até uma deformação de cerca de 0.4% a relação está de acordo com o previsto pela equação 5.13.
Diz-se que a deformação é elástica. Uma vez retirada a tensão, o osso volta ao tamanho inicial.
No entanto a partir de uma deformação de cerca de 0.5% a força de retorno do osso varia muito
pouco com a deformação. Ocorrem microrupturas que se vão acumulando com a repetição do movimento e que podem eventualmente levar à ruptura. Por exemplo, se dobrar e endireitar um clip um
número suficiente de vezes eventualmente ele há-de quebrar.
A ruptura é possível num só movimento, basta que exceda o limite de deformação máxima. No caso
da figura a ruptura ocorre para uma deformação de cerca de 1.7% (onde a curva tensão-deformação
termina).
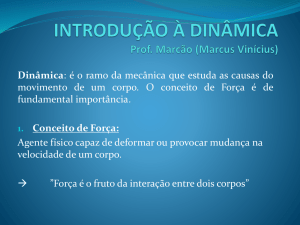
A figura 5.17 refer-se ao fémur humano quando sujeito a uma compressão (caso da figura 5.18a).
a
b
c
d
Figura 5.18: Tipos de tensão [4]
30
e
CAPÍTULO 5. MECÂNICA
5.4. DEFORMAÇÃO ELÁSTICA E INELÁSTICA DE CORPOS
Porém a tensão pode ser aplicada de 3 formas fundamentais. Elas são: compressão (figura 5.18a),
tracção (figura 5.18b) e cisalhamento (figura 5.18c).
Outras formas de aplicação da tensão são apenas uma combinação delas. Por exemplo: a torção
(figura 5.18d) é uma combinação de tracção e cisalhamento; a flexão (figura 5.18e) é uma combinação
de compressão e tracção.
31
Bibliografia
[1] Davidovits. Physics in Biology and Medicine 3rd (Third) Edition byDavidovits (Academic Press;,
2007), 3rd (third) edition edn.
[2] Herman, I. P. Physics of the Human Body (Biological and Medical Physics, Biomedical Engineering)
(Springer, 2008), 1st ed. 2007. corr. 2nd printing edn.
[3] Brown, B. H., Smallwood, R. H., Barber, D. C., Lawford, P. V. & Hose, D. R. Medical Physics and
Biomedical Engineering (Series in Medical Physics and Biomedical Engineering) (Taylor & Francis,
1999), 1 edn.
[4] Knudson, D. Fundamentals of Biomechanics (Springer, 2007), 2nd edn.
43