ANÁLISE ALGÉBRICA E SIMULAÇÃO – ESTUDO DE UM
CASO
Amauri Oliveira1, José Sérgio da Rocha Neto2, Gurdip Singh Deep2 e Raimundo Carlos Silvério Freire2
Universidade Federal da Bahia
Escola Politécnica
Departamento de Engenharia Elétrica
Rua Aristides Novis, 2, 40 210 – 630 – Salvador – BA
Fone (71) 237 2367 – Fax (71) 237 2367
[email protected]
Universidade Federal da Paraíba
Centro de Ciências e Tecnologia
Departamento de Engenharia Elétrica
Caixa Postal. 10 105 – Campina Grande – PB
58 109 –970
[email protected]
Resumo. Neste trabalho apresenta-se um estudo comparativo entre as técnicas de simulação e a
análise algébrica, tendo como objeto a caracterização de um sensor termo-resistivo e a
determinação do tempo de resposta de uma estrutura em ponte de Wheststone que contém o sensor
na sua malha de realimentação. Descrevem-se as etapas de simulação comparando os resultados
obtidos, com diversas ferramentas de simulação, com os resultados obtidos através da análise
algébrica dos sistemas implementados. Resultados experimentais foram obtidos objetivando
comprovar os dados adquiridos com os modelos simulados e com a análise algébrica do sistema. A
observação do comportamento de alunos na utilização de PC's, estimularam a elaboração deste
trabalho, que deve ser de interesse, sobretudo, para aqueles que trabalham em atividades de ensino
e pesquisa.
Palavras-chave: Simulação, Análise algébrica, Sensor termo-resistivo
NTM - 20
1.
INTRODUÇÃO
A rápida evolução dos computadores é notória. Até o final dos anos 70, este equipamento ainda não tinha se
popularizado e seu uso era dificultado por diversos problemas, por exemplo: perfurar cartões, tempo excessivo de
execução de programas, etc.
Com a redução dos custos, o aparecimento e evolução dos computadores pessoais, especialmente o aumento da
velocidade, aliados a disponibilidade de hardware e software para esses equipamentos, eles passaram a ser largamente
utilizados em diversas áreas de atividade. Os programas passaram a ser executados em tempos curtos e a capacidade de
memória cresceu de forma exponencial, possibilitando assim o desenvolvimento de programas cada vez mais
complexos em relação a quantidade e a qualidade das tarefas a executar e cada vez mais simples em relação a interação
homem-máquina.
Em conseqüência, na educação, na pesquisa e no desenvolvimento de projetos, os programas de simulação
vieram ocupar um espaço cada vez maior, permitindo assim que sejam apreciadas as possíveis respostas de um sistema,
sem submetê-lo as prováveis condições adversas. Devido às facilidades mencionadas, muitas vezes as pessoas são
naturalmente levadas a utilizar simulação, quando outras formas de avaliação poderiam ser utilizadas.
Mesmo que os programas de simulação tenham trazido um salto qualitativo na forma de se avaliar um
problema, eles nem sempre prevêem todos os aspectos. Portanto, os programas de simulação não devem substituir
inteiramente outras formas tradicionais de avaliação de problemas, e a utilização conjunta e/ou complementar é mais
indicada, sempre que possível.
Neste trabalho, a partir de um exemplo para o qual a utilização de simulação não gerou resultados conclusivos,
pretende-se mostrar a necessidade de utilização conjunta de análise algébrica e simulação. Esse exemplo e a observação
do comportamento de alunos na utilização de PC's, estimularam a elaboração deste trabalho, que deve ser de interesse,
sobretudo, para aqueles que trabalham em atividades de ensino e pesquisa.
O procedimento iterativo, com aprendizagem por tentativas, sem a utilização de lógica e dedução, tem mudado
o comportamento das gerações atuais, devendo-se questionar suas conseqüências.
2.
O PROBLEMA E AS PRIMEIRAS SIMULAÇÕES
Interessados na utilização de sensor termo-resistivo para medição de radiação térmica solar, um professor do
Departamento de Engenharia Mecânica da UFPB solicitou ao Laboratório de Instrumentação Eletrônica, a
caracterização de um sensor e a determinação do tempo de resposta de um circuito já conhecido, contendo o sensor.
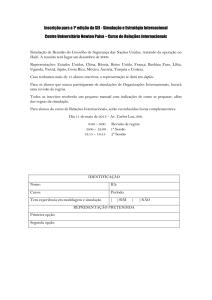
Este circuito é apresentado na Fig. 1. O sensor (Rs) é um dos braços de uma ponte de Wheatstone, na qual a
tensão de desequilíbrio é amplificada e realimentada. Esta realimentação tem o objetivo de manter constante a
resistência do sensor e a sua temperatura.
Embora o circuito já fosse conhecido, Doebelin [1], não se tinha uma descrição precisa do seu comportamento
e para determinar o seu tempo de resposta, decidiu-se usar simulação e montagem experimental.
R1
R2
V
-
V0
V+
R3
Rs
H
Figura 1. Diagrama do circuito em ponte de Wheastone
2.1.
A primeira simulação
A primeira simulação foi realizada em linguagem C, e posteriormente, usando-se as mesmas equações, ela foi
repetida com implementação por blocos funcionais do Simulink, Anônimos [2].
O comportamento do sensor é descrito por duas equações [1]. Uma delas expressa a primeira lei da
termodinâmica aplicada ao sensor, em termos de energia por unidade de tempo, dada por:
NTM - 21
dT
αSH+Pe =hS(Ts −Ta) +mc s
dt
(1)
na qual: α é o coeficiente de absorção do sensor, S é a sua área, H é a radiação incidente, Pe é a potência elétrica
entregue ao sensor; h é o coeficiente de perdas para o meio ambiente, Ts é a temperatura do sensor; Ta é a temperatura
ambiente e m é a massa do sensor e c é o seu calor específico.
Para Ta constante:
αSH + Pe = hS (Ts − Ta ) + mc
d (Ts − Ta )
dt
(2)
A outra equação relaciona a resistência do sensor com sua temperatura, expressa por:
Rs = Ro (1 + βTs )
(3)
na qual: Rs é a resistência elétrica do sensor; Ro é a resistência do sensor na temperatura de 0 ºC e β é o coeficiente de
temperatura da resistência elétrica do sensor.
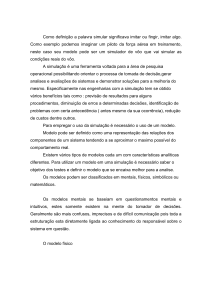
A representação das Equações (2) e (3) em diagrama de blocos, com blocos funcionais do simulink é mostrada
na Fig. 2, para um sensor com Ro =102,48 Ω, βRo = 0,3946 Ω/ºC, hS = 4,793.10-3 W/ºC, mc = 49,25.10-3 J/ºC.
Integrator
1
in_1
2
in_2
*
+
+
-
Is*Vs
1/s
Sum
20.3
+
+
Sum1
1/mc
0.394
a
+
+
Sum2
1
out_1
4
in_4
102.4865
4.793e-3
hS
3
Ro
in_3
Figura 2. Diagrama de blocos do sensor
Para o amplificador operacional foi adotada uma função de transferência de primeira ordem, Eq. (4), com Ao
=105 e p = 2 π 10 rd/s.
A(s ) =
Ao p
s+ p
(4)
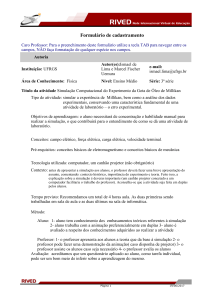
A simulação foi realizada com R1 = R2 = R3 = 116 Ω. O resultado de simulação, para os instantes iniciais logo
após o circuito ser ligado até a estabilização, é mostrado na Fig. 3, na qual nota-se um comportamento oscilatório do
sistema.
Esse comportamento oscilatório obtido na simulação não foi observado experimentalmente. Como os modelos
utilizados para o sensor, Doebelin [1] e Freire et al. [3], e para o amplificador operacional eram conhecidos e aceitos
como válidos, associou-se a oscilação a problema numérico que pode ocorrer na simulação de sistemas rígidos. Esta
suposição deve-se ao fato da constante de tempo do sensor (mc/hS) ser muito maior que a constante de tempo do
amplificador operacional (1/p).
2.2.
A segunda simulação
Dois procedimentos foram adotados na tentativa de se resolver o problema, supondo-se o sistema rígido. O
integrador do amplificador operacional, por este ter a menor constante de tempo, foi substituído por um integrador com
limite de saturação, [2] e Mastascusa [4]. Também utilizou-se métodos de integração mais indicados para simulação de
sistemas rígidos, disponíveis no Simulink [2].
O resultado desta segunda simulação, com os procedimentos descritos, é mostrado na Fig. 4, que mostra o
instante inicial de operação do circuito logo após ser ligado, e a resposta a um pequeno degrau de radiação aplicado no
instante t = 3 s, Oliveira et al. [5].
NTM - 22
12
10
8
6
Vo (V)
4
2
0
0
0.5
1
1.5
2
2.5
t (s)
3
3.5
4
Figura 3. Resultado da primeira simulação
4.05
12
4
760 ms
10
3.95
3.9
8
3.85
6
3.8
3.75
4
3.7
2
0
3.65
3.6
0
0.5
1
1.5
2
2.5
t (s)
3
3.5
4
3
3.2
3.4
3.6
3.8
t (s)
(a)
4
(b)
Figura 4. Resultado da segunda simulação
Entre uma simulação e outra, a única alteração de comportamento observada foi a redução da zona morta que
aparece entre 1 e 1,5 s da primeira simulação. Isto se deve á utilização do integrador com limite.
Como nestas duas simulações algumas características do amplificador operacional não estavam sendo
representadas, tais como slew rate e não linearidade antes da saturação, realizou-se mais uma simulação usando-se o
Spice e, o resultado não foi muito diferente ao do ilustrado na Fig.4. Parou-se com as simulações e, como o circuito é
relativamente simples, decidiu-se usar análise algébrica.
3.
ANÁLISE ALGÉBRICA
A análise algébrica foi realizada com base no modelo incremental do sensor e do circuito [1].
3.1.
Modelo incremental do sensor
Considerando-se pequenas variações na resistência, na temperatura, corrente através do sensor e tensão sobre
este, e na radiação térmica, tem-se:
Rs (t ) = Rso + rs (t )
Ts (t ) = Tso + k t rs (t )
NTM - 23
H (t ) = H o + hr (t )
I (t ) = I o + i (t )
Et (t ) = Eo + es (t )
Nestas equações Rso, Tso, Io e Eo são respectivamente a resistência, temperatura, a corrente e a tensão no sensor
no ponto de operação e Ho o valor médio da radiação para este ponto: rs(t), hr(t), i(t) e es(t) são as variações incrementais
e kt é o coeficiente de variação de temperatura em função da variação de resistência.
Usando-se superposição das transformadas de Laplace das equações com as variáveis incrementais, [1] e [5],
tem-se:
E s (s ) =
ö
æ k
kr
H r (s ) + çç e + Rso ÷÷ I (s )
τ a s +1
ø
è τ as +1
E s (s ) = Ec (s ) + Rso I (s )
(5)
(6)
Na Eq. (6), Ec(s) é uma fonte de tensão controlada que depende da radiação incidente e da corrente incremental
do sensor.
O diagrama de circuito para pequenos sinais, substituindo-se o sensor por seu modelo incremental é mostrado
na Fig. 5.
Is(s)
R1
R2
E(s)
R3
V
-
V
+
-
Eo(s)
+
Rs0
+
Ec(s)
~
Hr(s)
Figura 5. Circuito equivalente para pequenos sinais
3.2.
Análise algébrica do circuito
A tensão de pequenos sinais na entrada do amplificador operacional é dada por:
æ R3
Rso ö
R2
÷÷ − Ec (s )
E (s ) = Eo (s )çç
−
Rso + R2
è R1 + R3 Rso + R2 ø
(7)
Substituindo R3/(R1+R3) - Rso/(Rso+R2) por k1 e R2/(Rso+R2) por k2, tem-se:
E (s ) = Eo (s )k1 − Ec (s )k 2
por:
(8)
Considerando-se que a tensão Eo(s) é muito maior que Ec(s), a corrente incremental do sensor pode ser dada
NTM - 24
E o (s )
= k 3 Eo (s )
R2 + Rso
I (s ) ≈
(9)
A tensão de saída do amplificador é dada por:
E s (s ) = A(s )E (s )
(10)
Das Equações (8), (9), (10), (6) e (4), tem-se:
− k 2 k r Ao p
(τ a s + 1)(s + p )
E o (s )
=
Ao pk 3 k 2 k e
A p
H r (s )
1+
− o k1
(τ a s + 1)(s + p ) s + p
(11)
é fácil verificar que no ponto de operação Aok1 = 1, logo:
k 2 k r Ao p
E o (s )
τa
=
s A pk k k
H r (s )
s2 + + o 3 2 e
τa
τa
−
(12)
Neste ponto é interessante observar, para mostrar as facilidades com que se pode trabalhar atualmente, que a
equação de transferência, Eq. (11), também pode ser obtida com aplicativos de manipulação simbólica, Monagan et al.
[6].
Substituindo-se os parâmetros da Eq. (12) por seus valores no ponto de operação Rso =116 Ω, Tso = 34,25 ºC, Io
=17,31 mA e Vo = 4,016 V, para circuito com R1 = R2 = R3 = 116 Ω, amplificador operacional com Ao = 105 e p = 2 π 10
rd/s e sensor com Ro = 102,48 Ω, βRo = 0,3946 W/ ºC, hS = 4,793.10-3 W/ ºC, mc = 49,25.10-3 J/ºC e Ta = 27 ºC,
verificou-se que ela tem pólos complexos implicando em oscilação amortecida com freqüência wn
igual
Ao pk 3 k e / τ a = 86,80 rd/s, a qual corresponde a freqüência observada nas simulações (como podemos observar
na Fig. 4).
Esta coincidência entre simulação e análise algébrica implicava que algum parâmetro do amplificador
operacional não estava sendo considerado, nem nas simulações nem na análise algébrica.
Para as Equações (8), (9) e (10) pode-se traçar o fluxograma de sinais ilustrado na Fig. 6.
Is(s)
-k2ke/(t as+1)
-k2kr/(τas+1)
k3
A
Hr(s)
E o(s)
E(s)
k1
Figura 6. Fluxograma de sinais
Neste fluxograma aparecem duas realimentações, uma negativa de Eo(s) para E(s) passando por Is(s), e outra
com transmitância k1. Como esta transmitância relaciona-se com a tensão contínua de entrada do amplificador
operacional (tensão de desequilíbrio da ponte no ponto de operação), ela também depende da tensão de desvio de
entrada do amplificador (tensão de desvio Vos).
3.3.
Análise do circuito incluindo tensão de desvio
Se para o amplificador operacional for utilizado o modelo da Fig. 7, incluindo um amplificador sem tensão de
desvio de entrada (Vos) com função de transferência dada pela Eq. (4) mais Vos, a relação das tensões contínuas é dada
por:
NTM - 25
(
)
Vo = V + − V − − Vos Ao
V+
e
(13)
Vos
e1
+
Vo
V
-
amp-op sem tensão
de devio de entrada
Figura 7. Amplificador operacional com Vos
A diferença de tensão da entrada do amplificador operacional, V+ - V-, é igual a tensão de desequilíbrio da
ponte, logo:
V + − V − = k1Vo
(14)
Substituindo a Eq. (14) na Eq. (13), tem-se:
k1 =
1 Vos
+
Ao Vo
(15)
Considerando-se Vos nula, tem-se o resultado anteriormente obtido, isto é, k1Ao = 1. Como 1/Ao para os
amplificadores operacionais é pequeno, Vos tem uma grande influência no ponto de operação do circuito e em seu
comportamento dinâmico.
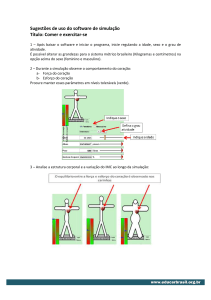
Para valores normais de tensão Vos, as raízes da função de transferência do circuito, Eq. (11), se localizam
sobre o eixo real negativo do plano s. Uma análise de posição das raízes considerando-se variação da tensão Vos foi
realizada e os resultados são ilustrados na Fig. 8, Oliveira [7].
4.
NOVAS SIMULAÇÕES
A simulação foi repetida considerando-se a tensão Vos, e verificou-se uma constante de tempo de valor
praticamente igual a constante de tempo do pólo dominante da função de transferência. O ponto de operação pode ser
obtido por processo iterativo calculando-se o valor de k1, e iniciando-se com Vos nulo [5].
Na Fig. 9 apresenta-se o resultado de simulação com tensão Vos igual a 5 mV. Na Fig. 9.a é mostrado o instante
inicial de operação do circuito após ser ligado, e a resposta a um pequeno pulso de radiação aplicado ente 5 e 8 s. Na
Fig. 9.b é destacado o intervalo entre 5 e 8 s, mostrando a variação de tensão normalizada em relação à variação
máxima, isto é (Vo(t)-Vo(5))/(Vo(8)-Vo(5)). O pólo dominante da função de transferência é igual a -1,248 rd/s.
5.
CONCLUSÕES
A partir do exemplo, descrito neste trabalho na mesma seqüência em que ele foi desenvolvido, tem-se a
intenção de mostrar que a simulação utilizada em separado nem sempre é o melhor meio de análise. Usando-se apenas
simulação, as causas de características importantes de um sistema podem não ser identificadas e se identificada a causa,
a relação causa-efeito pode não ser determinada.
Com análise algébrica pode-se deduzir e prever, mas necessita-se de simulação ou experimento para a
comprovação. Por outro lado, utilização em conjunto de simulação com outros meios de análise, auxilia a identificação
e comprovação de causa-efeito, criação e aperfeiçoamento de modelo, melhora a compreensão e retenção de informação
ou de conhecimento, e o conhecimento do sistema contribui com a simulação.
Nem sempre é possível se desenvolver uma análise como no exemplo utilizado. Sistemas complexos são mais
facilmente analisados usando-se simulação.
Atualmente aplicativos de manipulação simbólica podem substituir dedução algébrica. Alguns desses pontos
destacados são válidos tanto para análise e estudo como para projeto.
A tendência de crescimento de utilização de aplicativos de simulação, em áreas e aplicações diversas, nos
estimula a pensar em alguns dos pontos destacados, principalmente a nós que trabalhamos com ensino, pelo fato de
estarmos recebendo as primeiras gerações video game com forte tendência à utilização de procedimentos interativo e
iterativo, sem utilização de lógica e dedução.
NTM - 26
80
xx
60
x
Vos = 10 µV
Vos = 30 µV
40
Eixo Imaginário
20
o
0
Eixo Real
o
o
Vos = 30 µV
Vos = 10 µV
Vos = 20 µV
-20
-40
Vos = 30 µV
xx
x
-60
-80
-100
Vos = 10 µV
0
100
0.05
200
300
400
0.05
5 mV
0x
3 mV
1 mV
4 mV
2 mV
x
x
x
x
Eixo Real
(a)
-0.05
-8000
-6000
-4000
3 mV
1 mV
0 ox
-0.05
-3
-2000
2 mV
ox
Eixo Real
5 mV
x
xo
ox o
4e-3
(b)
-2.5
-2
-1.5
-1
-0.5
Figura 8. Lugar das raízes para diferentes valores de Vos
1
12
0.9
11
0.8
10
9
0.7
0.63
0.6
8
0.5
0.4
7
0.3
6
0.2
5
0.1
4
0
2
4
6
t (s)
8
10
(a)
0
5
5.5
6
5.79
Figura 9. Resultado de simulação incluindo Vos.
NTM - 27
6.5
7
t (s)
7.5
8
(b)
8.5
Agradecimentos
Os autores agradecem a CAPES (Coordenação de Aperfeiçoamento de Pessoal de Ensino Superior) e ao CNPq
(Conselho Nacional de Desenvolvimento Científico e Tecnológico) pelo apoio recebido durante o desenvolvimento
deste trabalho.
6.
REFERÊNCIAS
[1]
E.O. Doebelin, “Measurement Systems Applications and Design”, fourth edn. McGraw-Hill Kosakusha,
Tokyo, Japan, 1990.
[2]
Anônimos, “Simulink - Dynamic System Simulation Software – User Guide”, first edn, MathWorks Inc, USA,
1993.
[3]
R.C.S. Freire, J. S. Rocha Neto, G.S. Dep, A.M.N. Lima, e P.C. Lobo, “Experimental Determination of the
Time Constant of a Thermoresistive Sensor”, International Measurement Technology Conference, IMTC 94,
Hamamatsu – Japan, 1994, pp 450-453.
[4]
E.J. Mastascusa, “Computer Assisted Network and System Analysis”, first edn, John Wiley Sons, USA, 1988.
[5]
A. Oliveira, P.C. Lobo, G.S. Deep, R.C.S. Freire e J.S. Rocha Neto, “Frequency Domain Analysis of an
Electrical Substitution Radiometer”, Journal of Solar Energy Engineering 121(2) 1999, pp. 110-115.
[6]
M.B. Monagan, K.O. Geddes, K.M. Hel, G. Labahn e S.M. Vorkoetter, “Maple V – Programming Guide”, first
edn, Watrloo Maple Inc, Canada 1996.
[7]
A. Oliveira, “Sensores Termo-Resistivos em Configurações Realimentadas”, tese de doutorado, Universidade
Federal da Paraíba – Campina Grande – PB – Brasil, 1997.
NTM - 28