Introdução à Simulação Estocástica
Introdução à Simulação Estocástica
Parte 2 Introdução à Teoria da Probabilidade
Ramiro Brito Willmersdorf
[email protected]
Departamento de Engenharia Mecânica
Universidade Federal de Pernambuco
2011.2
Introdução à Simulação Estocástica
Resumo
1
Introdução
2
Espaço Amostral
3
Álgebra de Eventos
4
Medida de Probabilidade
5
Sistemas de Probabilidade
Introdução à Simulação Estocástica
Introdução
Teoria da Probabilidade
A Teoria da Probabilidade é o modelo matemático que permite
estudar de forma abstrata um fenômeno físico ao qual está
associado uma incerteza.
Este modelo será composto por três elementos:
um espaço amostral;
uma álgebra de eventos;
uma medida de probabilidade.
Introdução à Simulação Estocástica
Espaço Amostral
Experiências
Espaço Amostral
Para um fenômeno físico, será denida uma experiência. A
experiência caracteriza-se por:
denir explicitamente todos os resultados possíveis;
ser reprodutível em completa igualdade de condições;
para cada repetição, um dos resultados possíveis deve
necessariamente ocorrer;
condições idênticas podem levar a resultados distintos.
Cada resultado da experiência é chamado ponto-amostra e
denotado por
ω.
O conjunto de todos os pontos-amostra é chamado espaço
amostral e denotado por
Ω.
Introdução à Simulação Estocástica
Espaço Amostral
Exemplos
Lançamento de Dados
Experiência: lançar 1 dado, anotar a
face visível.
ω:
face visível.
Ω=
n
o
ou
Ω = 1, 2, 3, 4, 5, 6.
A representação numérica é apenas uma
conveniência.
Introdução à Simulação Estocástica
Espaço Amostral
Exemplos
Lançamento de Dados
Experiência: lançar 2 dados, onde a ordem importa, e anotar as
faces visíveis
ω:
Ω=
(Face 1, Face 2).
(
1
,
1
),
(
1
,
2
),
(
1
,
3
),
(
1
,
4
),
(
1
,
5
),
(
1
,
6
),
(
2, 1),
·
·
·
(
2, 6),
.
.
.
.
.
.
(
5
,
1
),
·
·
·
(
5
,
6
),
(6, 1), (6, 2), (6, 3), (6, 4), (6, 5), (6, 6)
A cardinalidade do espaço amostral é 36.
Introdução à Simulação Estocástica
Espaço Amostral
Exemplos
Lançamento de Dados
Experiência: lançar 2 dados, onde a ordem não importa, e anotar as
faces visíveis
ω:
(Face 1, Face 2).
(1, 1), (1, 2), (1, 3), (1, 4), (1, 5),
(2, 2),
···
(3, 3)
Ω=
(4, 4)
(5 , 5 )
(1, 6),
(2, 6),
.
.
.
(4, 6),
(5, 6),
(6, 6)
A cardinalidade do espaço amostral é 21.
Introdução à Simulação Estocástica
Espaço Amostral
Exemplos
Sinal Elétrico
Ou tensão, pressão, temperatura, etc.
Qualquer grandeza contínua, medida analógicamente.
ω:
uma leitura do mostrador.
Ω = [Vmin , Vmax ]
Em princípio, há innitos eventos,
que variam continuamente.
Introdução à Simulação Estocástica
Espaço Amostral
Exemplos
Sinal Elétrico
Ou tensão, pressão, temperatura, etc.
Qualquer grandeza contínua, medida discretamente.
ω:
uma leitura do mostrador,
restrita à resolução do mostrador.
Ω = {Vmin , . . . , Vmax },
em saltos
discretos.
Em princípio, há um número
nito de eventos, que variam
discretamente.
Introdução à Simulação Estocástica
Espaço Amostral
Exemplos
Diâmetro de barras
ω:
um diâmetro medido (um número real).
Ω = [dmin , dmax ].
ou, outra interpretação para a mesma
experiência,
ω:
o diâmetro medido é aceitável (um
resultado booleano).
Ω = [Verdadeiro, Falso].
Uma mesma experiência pode originar espaços
amostrais diferentes.
Introdução à Simulação Estocástica
Espaço Amostral
Exemplos
Esquematicamente
Introdução à Simulação Estocástica
Álgebra de Eventos
Conjuntos de Eventos
É muito comum estarmos interessados em grupos de pontos
amostra, ou subconjuntos de
Ω.
A manipulação de subconjuntos de pontos amostra, ou eventos, é
uma das pedras fundamentais da teoria da probabilidade.
Usa-se a Teoria dos Conjuntos para formalizar esta manipulação.
Introdução à Simulação Estocástica
Álgebra de Eventos
Teoria dos Conjuntos
Igualdade
Dois conjuntos são A e B são iguais se todo o ponto amostra que
pertence a A também pertence a B , e todo elemento de B também
pertence a A.
Denição: A
=B
∀ω ∈ A ⇒ ω ∈ B ∧ ∀ω ∈ B ⇒ ω ∈ A
Introdução à Simulação Estocástica
Álgebra de Eventos
Teoria dos Conjuntos
Inclusão
Um conjunto A está incluído (ou contido) em B se todo elemento
de A pertence a B .
Inclusão: A
⊂B
∀ω ∈ A ⇒ ω ∈ B
Ou, alternativamente, B
⊃ A,
isto é, B contém A.
Introdução à Simulação Estocástica
Álgebra de Eventos
Teoria dos Conjuntos
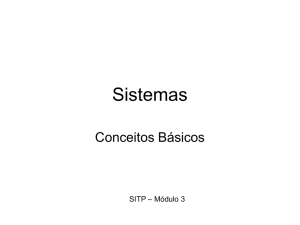
Diagramas de Venn
São extremamente úteis para a visualização de operações com
conjuntos.
Por exemplo, A
⊂ B:
Introdução à Simulação Estocástica
Álgebra de Eventos
Teoria dos Conjuntos
União
A união dos conjuntos A e B é denida como todos os elementos
de
Ω
que pertencem a A ou pertencem a B (ou aos dois.)
União: A
∪B
A
∪ B , {ω ∈ Ω : ω ∈ A ∨ ω ∈ B }
Introdução à Simulação Estocástica
Álgebra de Eventos
Teoria dos Conjuntos
Observação
∨ representa a operação lógica ou clássica, não exclusiva isto é:
E1
∨ E2
E1
E2
V
V
V
V
F
V
F
V
V
F
F
F
Introdução à Simulação Estocástica
Álgebra de Eventos
Teoria dos Conjuntos
Intersecção
A intersecção dos conjuntos A e B é denida como todos os
elementos de
Ω
Intersecção: A
que pertencem a A e pertencem a B .
∩B
A
∩ B , {ω ∈ Ω : ω ∈ A ∧ ω ∈ B }
Introdução à Simulação Estocástica
Álgebra de Eventos
Teoria dos Conjuntos
Complemento
O complemento de A é o conjunto dos elementos de
Ω
que não
pertencem a A.
Complemento: A
A
, {ω ∈ Ω : ω ∈
/ A}
Introdução à Simulação Estocástica
Álgebra de Eventos
Teoria dos Conjuntos
Diferença
O conjunto dos elementos que pertencem a B e não pertencem a A
é a diferença entre B e A.
Diferença: B
−A
B
− A , {ω ∈ Ω : ω ∈ B ∧ ω ∈
/ A}
Introdução à Simulação Estocástica
Álgebra de Eventos
Teoria dos Conjuntos
Denições Úteis
O conjunto que não contém elementos é o conjunto vazio,
denotado por
∅.
Dois conjuntos que não tem elementos em comum são
chamados disjuntos.
Classe é o nome dado a um conjunto de conjuntos.
Introdução à Simulação Estocástica
Álgebra de Eventos
Teoria dos Conjuntos
Comutatividade
As operações de união e intersecção são comutativas.
Comutatividade
A
∪B =B ∪A
A
∩ B = B ∩ A.
e
Isto pode ser facilmente demonstrado através das denições e de os
operadores lógicos
∧
e
∨
serem comutativos.
Introdução à Simulação Estocástica
Álgebra de Eventos
Teoria dos Conjuntos
Associatividade
As operações de união e intersecção são associativas.
Associatividade
A
∪ (B ∪ C ) = (A ∪ B ) ∪ C
A
∩ (B ∩ C ) = (A ∩ B ) ∩ C .
e
Isto pode ser facilmente demonstrado através das denições e de os
∧
operadores lógicos
e
∨
serem associativos.
Introdução à Simulação Estocástica
Álgebra de Eventos
Teoria dos Conjuntos
Distributividade
A operação de intersecção é distributiva em relação à união.
Distributividade
A
∩ (B ∪ C ) = (A ∩ B ) ∪ (A ∩ C ).
Introdução à Simulação Estocástica
Álgebra de Eventos
Teoria dos Conjuntos
Leis de De Morgan
Primeira lei: o complemento da união é a intersecção dos
complementos.
Primeira Lei
A
∪ B = A ∩ B.
Segunda lei: o complemento da intersecção é a união do
complementos.
Segunda Lei
A
∩ B = A ∪ B.
Introdução à Simulação Estocástica
Álgebra de Eventos
Álgebra
Álgebra de conjuntos
Estamos interessados em trabalhar com subconjuntos do
espaço amostral.
Os subconjuntos são denominados subconjuntos de interesse.
Estes subconjuntos formam uma classe.
Para consistência da Teoria da Probabilidade, esta classe deve
ter algumas propriedades.
As propriedades requeridas denem uma álgebra.
Introdução à Simulação Estocástica
Álgebra de Eventos
Álgebra
Álgebra
Uma classe
A
é dita uma álgebra quando satisfaz as condições:
1
A
∈ A ⇒ A ∈ A.
2
A
∈ A ∧ B ∈ A ⇒ (A ∪ B ) ∈ A.
Consequências:
1
A
∈ A ∧ B ∈ A ⇒ (A ∩ B ) ∈ A.
2
A
∈ A ∧ B ∈ A ⇒ (B − A) ∈ A.
3
∅ ∈ A.
4
Ω ∈ A.
5
A
i ∈ A; i = 1, 2, . . . , n ⇒
Sn
i =1 Ai ∈ A.
Introdução à Simulação Estocástica
Álgebra de Eventos
Álgebra
σ -Álgebra
Se
A
é uma álgebra e
A
i ∈ A; i = 1, 2, . . . , n ⇒
n
[
i =1
A
i ∈A
é válida para um número innito (contável) de conjuntos, isto é
A
i ∈ A; i = 1, 2, . . . , n ⇒
então a álgebra é uma
A menor
σ -álgebra
é representada por
∞
[
i =1
A
i ∈A
σ -álgebra.
que contém todos os elementos de uma classe
A(C)
e denominada
σ -álgebra
gerada por
C.
C
Introdução à Simulação Estocástica
Álgebra de Eventos
Álgebra
Exemplo
Na experiência do lançamento de um dado, o espaço amostral é:
Ω = {1, 2, 3, 4, 5, 6}.
Denindo
C = {∅, Ω, {1, 3, 5}, {2, 4, 6}, {1}} ,
claramente,
C
não é uma álgebra, pois
{1} = {2, 3, 4, 5, 6}
não pertence a
C.
Introdução à Simulação Estocástica
Álgebra de Eventos
Álgebra
Exemplo
Por inspeção, podemos vericar que
C = {∅, Ω, {1, 3, 5}, {2, 4, 6}, {1},
{1, 2, 4, 6}, {2, 3, 4, 5, 6}, {3, 5}} ,
é uma álgebra, e é uma
σ -álgebra.
Observação: É possível mostrar que para uma classe qualquer
existe pelo menos uma
σ -álgebra
contendo
C.
C,
Introdução à Simulação Estocástica
Álgebra de Eventos
Álgebra
Denições
Evento
Evento é qualquer subconjunto de
Ω
que pertença à
σ -álgebra.
Eventos Mutuamente Exclusivos
Dois eventos são mutuamente exclusivos quando correspondem a
conjuntos disjuntos de
Uma
σ -álgebra
Ω.
é conveniente para representar os resultados de
interesse pois operações entre os membros da classe permitem
obter todos as combinações possíveis.
Introdução à Simulação Estocástica
Medida de Probabilidade
Frequência Relativa
Noção Intuitiva
Temos uma noção muito intuitiva de probabilidade.
A idéia é que, se um processo se mantém inalterado, mais ou
menos a mesma proporção de coisas que aconteceram no
passado acontecerão no futuro.
Claramente, a idéia da proporção é fundamental na nossa
percepção da chance das coisas acontecerem.
Vamos quanticar a proporção numericamente, usando a
frequência relativa dos eventos de interesse.
Introdução à Simulação Estocástica
Medida de Probabilidade
Frequência Relativa
Frequência Relativa
Supondo que uma experiência tenha sido realizada N vezes, e que
dentre estas, n (A) o evento A tenha ocorrido, a frequência relativa é
=
f
( )
n A
N
Propriedades óbvias:
0
≤
( )
n A
N
≤1
e
n
(Ω)
N
= 1.
Introdução à Simulação Estocástica
Medida de Probabilidade
Frequência Relativa
Propriedade Aditiva
Se dois eventos A e B são mutuamente exclusivos, isto é,
A
∩ B = ∅,
então,
( ∪ B ) = n(A) + n(B )
n A
e consequentemente
( ∪ B)
n A
N
=
( )
n A
N
+
( )
n B
N
A frequência relativa da união de dois eventos mutuamente
exclusivos é a soma das frequências relativas.
Introdução à Simulação Estocástica
Medida de Probabilidade
Frequência Relativa
Probabilidade como Frequência Relativa
Naturalmente, esperamos que a frequência relativa estabilize,
quando o número de experimentos cresce;
Podemos tentar denir a probabilidade de um evento A como
( )=
P A
lim
N →∞
( )
n A
N
No entanto, não faremos isto; para uma dada experiência, N
nito não garante a convergência;
Tomaremos as propriedades da frequência relativa e
deniremos axiomaticamente uma função de eventos que
tenha o mesmo comportamento.
Introdução à Simulação Estocástica
Medida de Probabilidade
Axiomas da Probabilidade
Denição Axiomática da Probabilidade
A medidade de probabilidade é uma função denida em
obedece aos três axiomas a seguir
Axioma 1
( ) ≥ 0.
P A
Axioma 2
P
(Ω) = 1.
A
que
Introdução à Simulação Estocástica
Medida de Probabilidade
Axiomas da Probabilidade
Denição Axiomática da Probabilidade
Axioma 3
Se A
∩ B = ∅,
então
( ∪ B ) = P (A) + P (B ).
P A
Se A
i ∩ Aj = ∅, i , j = 1, 2, . . .
(i 6= j ), então
!
∞
∞
[
X
Ai
=
P (Ai ).
P
i =1
i =1
Introdução à Simulação Estocástica
Medida de Probabilidade
Axiomas da Probabilidade
Observações
Algumas observações interessantes.
O domínio de P é a
σ -álgebra A.
O contradomínio de P é [0, 1]
∈ R.
Qualquer função P que atenda aos axiomas é aceitável.
A função P pode ser representada pela seguinte notação:
P
:
A =⇒ R
A
7−→ P (A)
Introdução à Simulação Estocástica
Medida de Probabilidade
Axiomas da Probabilidade
Propriedades
A função P tem proprieadades importantes, a saber
Aditividade
Para n eventos disjuntos
A
{Ai , i = 1, 2, . . . , n},
i ∩ Aj = ∅;
temos
P
, = 1, 2, . . . , n
i j
n
[
i =1
!
A
i
=
n
X
i =1
( i ).
P A
Introdução à Simulação Estocástica
Medida de Probabilidade
Axiomas da Probabilidade
Propriedades
Probabilidade do Complemento
( ) = 1 − P ( A)
P A
Probabilidade do Evento Vazio
P
(∅) = 0
Limitante Superior para P(A)
( )≤1
P A
isto é
(i 6= j )
Introdução à Simulação Estocástica
Medida de Probabilidade
Axiomas da Probabilidade
Propriedades
Probabilidade da União
( ∪ B ) = P (A) + P (B ) − P (A ∩ B ).
P A
Introdução à Simulação Estocástica
Medida de Probabilidade
Probabilidade Condicional
Probabilidade Condicional
Dados dois eventos A e B , com P (A)
> 0,
denimos a
probabilidade condicional de B dado A como:
( | )=
P B A
( ∩ B)
.
P ( A)
P A
A probabilidade condicional mede a probabilidade do evento B ter
ocorrido se o evento A ocorreu.
Introdução à Simulação Estocástica
Medida de Probabilidade
Probabilidade Condicional
Interpretação
A probabilidade condicional mede a parcela das ocorrências do
evento A nas quais o evento B ocorreu também.
Em termos de frequência relativa, a probabilidade de B , quando A
ocorreu é :
( ∩ B)
.
n (A)
n A
Rescrevendo:
( ∩ B)
n (A ∩ B ) N
=
=
n (A)
N
n (A)
n A
( ∩ B)
.
P (A)
P A
Introdução à Simulação Estocástica
Medida de Probabilidade
Probabilidade Condicional
Interpretação
Importante: Como não usamos a frequência relativa como denição
de probabilidade, não tomamos a expressão anterior como denição
de probabilidade condicional.
Introdução à Simulação Estocástica
Medida de Probabilidade
Probabilidade Condicional
Consequências
1 Se
( ) > 0 e A e B são
P (A ∩ B ) = 0, portanto
P A
mutuamente exclusivos, A
∩B = ∅
e
( | ) = 0.
P B A
2 Se
A
⊂ B,
então A
∩ B = A,
e
( | ) = 1.
P B A
3 Se
A
⊃ B,
então A
∩ B = B,
( | )=
P B A
e
( )
≥ P (B ).
P (A)
P B
Introdução à Simulação Estocástica
Medida de Probabilidade
Probabilidade Total
Partição do Espaço Amostral
Dene-se uma partição do espaço amostral com um conjunto de
eventos
{Bi }, i = 1, . . . , m
B
i ∩ Bj = ∅,
tal que
∀i , j = 1, . . . , m,
(i 6= j ),
e
m
[
i =1
i = Ω.
B
Os eventos que compõe a partição são portanto mutuamente
exclusivos e exaustivos. O conceito também é válido para qualquer
evento C
⊂ Ω.
Introdução à Simulação Estocástica
Medida de Probabilidade
Probabilidade Total
Teorema da Probabilidade Total
Dado um evento A e uma partição de
Ω
{Bj }, j = 1, . . . , m,
podemos escrever
( )=
P A
ou
( )=
P A
m
X
j =1
m
X
j =1
( ∩ Bj )
P A
( | j )P (Bj )
P A B
Introdução à Simulação Estocástica
Medida de Probabilidade
Probabilidade Total
Regra de Bayes
Considerando uma partição
( j) > 0
P B
{Bj }, j = 1, . . . , m
para qualquer j e A um evento com
escrever
( j |A) =
P B
e
( | j) =
P A B
Ω, com
P (A) > 0,
de
( j ∩ A)
P (A)
P B
( j ∩ A)
P (Bj )
P B
juntando as duas expressões
( j |A) =
P B
( | j )P (Bj )
P (A)
P A B
e usando o teoremada da probabilidade total
( j )P (A|Bj )
k =1 P (Bk )P (A|Bk )
P B
( j |A) = Pm
P B
podemos
Introdução à Simulação Estocástica
Medida de Probabilidade
Probabilidade Total
Regra de Bayes
Regra de Bayes
( j )P (A|Bj )
k =1 P (Bk )P (A|Bk )
P B
( j |A) = Pm
P B
( j)
P B
são as probabilidades a priori.
( j |A)
P B
são as probabilidades a posteriori.
A regra de Bayes relaciona probabilidades a posteriori com as
probabilidades condicionais e a priori.
Introdução à Simulação Estocástica
Medida de Probabilidade
Independência Estatística
Independência Estatística
Independência
Dois eventos A e B são estatisticamente independentes quando
( ∩ B ) = P (A)P (B )
P A
Em termos da probabilidade condicional, se P (A)
se A e B são independentes, então
( | ) = P (B )
P B A
e
( | ) = P (A)
P A B
>0
e P (B )
> 0,
Introdução à Simulação Estocástica
Medida de Probabilidade
Independência Estatística
Observações
1 Se
A
e B são mutuamente exclusivos, então P (A
se P (A)
>0
e P (B )
> 0,
∩ B ) = 0,
então os eventos não são
independentes, pois
( ∩ B)
= 0 6= P (B ).
P ( A)
P A
( | )=
P B A
2 Se os eventos
e B são independentes e mutuamente
A
exclusivos, então
( )=0
P A
( ) = 0.
ou
P B
Introdução à Simulação Estocástica
Medida de Probabilidade
Independência Estatística
Generalização
Eventos
{Ak }, k = 1, . . . , n
são estatiscamente independentes
quando para qualquer conjunto de índices distintos
{ki }, i = 1, . . . , j
com
i ∈ {1, . . . , n},
k
i
= 1, . . . , j
e
∀j ∈ 2, . . . , n
temos
P
j
\
i =1
!
k
A
i
=
j
Y
i =1
( k)
P A
i
e,
Introdução à Simulação Estocástica
Sistemas de Probabilidade
Sistema de Probabiliade
O trio formado por
Um espaço amostral
Uma
Ω;
σ -álgebra A;
Uma medida de probabilidade P ;
congura um sistema de probabilidade, denotado por
S = (Ω, A, P )
Introdução à Simulação Estocástica
Sistemas de Probabilidade
Sistemas de Probabilidade Combinados
Produto Cartesiano
Pode ser interessante observar mais de uma experiência
simultaneamente.
Ω1 e Ω2 , com
2
ωj , respectivamente, construimos pares
Se os espaços amostrais de duas experiênciais são
1
pontos amostrais ωi e
ordenados
(ωi1 , ωj2 )
que denem um novo conjunto
Ω2 ,
Ω,
o produto cartesiano de
denotado por
Ω = Ω1 × Ω2 .
Ω1
e
Introdução à Simulação Estocástica
Sistemas de Probabilidade
Sistemas de Probabilidade Combinados
Produto Cartesiano
Podemos considerar uma única experiência, cujos resultados são
(ωi1 , ωj2 ).
Se as experiências originais correspondem a
S1
= (Ω1 , A1 , P1 )
e
S2
= (Ω2 , A2 , P2 )
e a experiência combinada ao sistema
S
= (Ω, A, P )
seria muito natural tomar
Ω = Ω1 × Ω2
A = A1 × A2 .
e
Infelizmente não é possível arma nada sobre P .
Introdução à Simulação Estocástica
Sistemas de Probabilidade
Sistemas de Probabilidade Combinados
Sistemas Independentes
Sistemas de Probabilidade Independentes
Dois sistemas de probabilidade S1
= (Ω2 , A2 , P2 )
qualquer A1 ∈ A1
S2
e
são estatisticamente independentes quando para
e A2
(
∈ A2 ,
P A1
P
= (Ω1 , A1 , P1 )
temos
× A2 ) = P1 (A1 )P2 (A2 )
é a medida de probabilidade da experiência combinada.
Observação: Se uma experiência puder ser analisada como a
combinação de duas experiências com sistemas independentes,
normalmente é conveniente fazê-lo.
Introdução à Simulação Estocástica
Sistemas de Probabilidade
Sistemas de Probabilidade Combinados
Generalização
Considerando n sistemas de probabilidades
S
k = (Ωk , Ak , Pk ), k = 1, . . . , n
associados a n experiências, e n
eventos tais que
A
i ∈ Ak ,
k
os sistemas de probabilidade S
k
= 1, . . . , n ,
k , k = 1, . . . , n
são independentes
quando a medida probabilidade P da experiência combinada é
( i × Ai2 × . . . Ai ) = P1 (Ai1 )P2 (Ai2 ) · · · Pn (Ai ).
P A1
n
n