Mecânica e Ondas
fascı́culo 15
c 2008 Mario J. Pinheiro
Copyright °
All rights reserved
April 26, 2010
Contents
15.1 Momento de inércia dos corpos rı́gidos . . . . . . . . . . . . . . . 333
15.2 Teorema dos eixos paralelos . . . . . . . . . . . . . . . . . . . . . 340
15.3 Teorema do eixo perpendicular . . . . . . . . . . . . . . . . . . . 341
15.4 Momento angular de uma partı́cula . . . . . . . . . . . . . . . . . 346
15.5 Movimento de rotação de um sólido rı́gido. Equação dos momentos351
15.6 Dinâmica do corpo rı́gido . . . . . . . . . . . . . . . . . . . . . . 354
15.7 Sistema isolado. Forças internas . . . . . . . . . . . . . . . . . . . 358
15.8 Dinâmica rotacional: aceleração angular ou torque . . . . . . . . 359
15.9 Dinâmica do corpo rı́gido: rotação em torno de um eixo fixo . . . 360
15.10Conservação do momento angular e energia cinética . . . . . . . 362
15.11Trabalho e energia no movimento rotacional . . . . . . . . . . . . 368
15.12Teorema do trabalho-energia no movimento rotacional . . . . . . 370
15.13Impulso angular . . . . . . . . . . . . . . . . . . . . . . . . . . . 371
15.14Cilindros/esferas a rolar . . . . . . . . . . . . . . . . . . . . . . . 374
15.15Movimento de rolamento de um corpo rı́gido . . . . . . . . . . . 375
15.16Giroscópio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 383
15.17Dinâmica linear do giroscópio . . . . . . . . . . . . . . . . . . . . 386
15.18Precessão giroscópica . . . . . . . . . . . . . . . . . . . . . . . . . 386
Mario J. Pinheiro
Departamento de Fı́sica e Instituto de Plasmas e Fusão Nuclear
Instituto Superior Técnico
email: [email protected]
332
“No intelligent idea can gain general acceptance unless some stupidity is mixed in with it.”
- Fernando Pessoa
15.1
Momento de inércia dos corpos rı́gidos
Calcula-se o momento de inércia I de um corpo rı́gido em rotação em torno de
um eixo dividindo-o em pequenos
elementos de volume de massa elementar ∆m.
P 2
Usamos a expressão I =
r ∆m e toma-se o limite da soma quando ∆m → 0.
O r representa a distância perpendicular ao eixo de rotação (Fig. 1):
Z
X
I = lim
r2 ∆m =
r2 dm.
(15.1)
∆m→0
V
Temos que exprimir ∆m em termos das suas componentes de modo a efectuar
o cálculo e para tal introduz-se a densidade volúmica local de massa ρ:
ρ = lim∆V →0 ∆m
∆V =
∴ dm = ρdV,
dm
dV ,
donde podemos obter finalmente o momento de inércia:
Z
I = ρr2 dV.
Para corpos homogéneos o integral anterior reduz-se a
Z
M
I=
r2 dV.
V
(15.2)
(15.3)
(15.4)
Axioma. - O momento de inércia de um corpo relativamente ao eixo de rotação
é a soma dos momentos de inércia de qualquer parte constituinte, e de modo
semelhante, o momento de inércia relativamente a qualquer eixo de qualquer
superfı́cie ou volume é igual à soma dos momentos de inércia de qualquer parte
constituinte na qual podemos imaginar a superfı́cie ou o volume divididos.
Como ilustração do que se disse, podemos referir que o momento de inércia
do pião mostrado na Fig. 2 relativamente ao seu eixo de revolução é igual ao
momento de inércia da cúpula hemisférica ABC mais a parte inferior do corpo
ABDE, mais a ponta cónica em aço DE.
Na Fig. 3 apresentam-se os momentos de inércia dos corpos rı́gidos de uso mais
frequentes.
Exemplo 1: Cilindro ôco de densidade uniforme.
333
z
ω
r
∆m
O
y
x
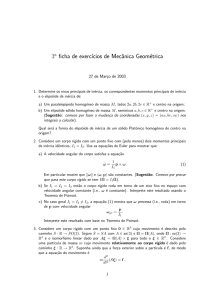
Figure 1: Corpo sólido em rotação em torno do eixo OZ. r representa a distância
em relação ao eixo OZ (na perpendicular) da massa ∆m.
334
C
A
B
D
E
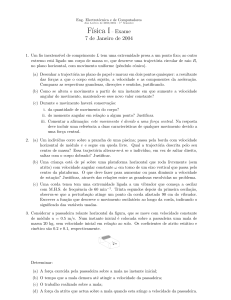
Figure 2: Pião.
335
Figure 3: Momentos de inércia.
336
Figure 4: Momento de inércia de um cilindro oco. A massa elementar consiste
num cilindro de raio r e espessura dr.
337
Em coordenadas cilı́ndricas o elemento diferencial de volume (Vd. Fig. 4) é
dado por:
dV = 2πlrdr
(15.5)
dm = ρdV = 2πρlrdr
QuadroNegro 1
Portanto, concluı́mos que o momento de inércia do cilindro ôco é:
I=
M 2
(R2 + R12 ).
2
338
(15.6)
A Eq. 15.3 permite obter de imediato os momentos de inércia dos seguintes
corpos sólidos:
• Disco uniforme, R1 = 0 ⇒ I = 12 M R2 ;
• Anel uniforme, R1 ≈ R2 = R ⇒ I = M R2 .
Repare que em qualquer dos casos, o momento de inércia do cilindro não depende
do seu comprimento l. Isto é, a distribuição de matéria ao longo do eixo não é
relevante. Porém, o momento de inércia depende fortemente da distribuição da
matéria radialmente, como mostra a Fig. 5.
Exemplo 2: Barra (ou haste) uniforme.
Toma-se o eixo de rotação que passa pelo seu centro e é perpendicular ao seu
comprimento.
O comprimento da barra é L e, portanto, neste caso a distância radial r vai de
0 a L/2 de cada lado. Se a barra fôr uniforme, podemos escrever
dm =
M
dr = λdr.
L
(15.7)
R
Deve-se em seguida integrar r2 dm desde o centro até uma das extremidades,
multiplicando depois por 2 (pois há duas extremidades):
Z
I=
r2 dm = 2
M
L
Z
L/2
0
r2 dr =
M L2
.
12
(15.8)
Referimos aqui, sem proceder ao seu cálculo, que o momento de inércia de uma
esfera, I = 25 M R2 . Todos os exemplos referidos mostram que é possı́vel (e
também usual) representar o momento de inércia como o produto da massa do
corpo M pelo quadrado de um comprimento a que se chama raio de giração
em torno do eixo de rotação, k:
I = M k2 .
(15.9)
Se qualquer outro corpo tiver a massa total M localizada à distância k do eixo,
o momento de inércia será igual à de qualquer um dos corpos sólidos acima
referidos. O raio de giração é definido pela relação:
P
M k 2 = P i (mi ri2 )
(15.10)
(m r 2 )
k2 = i Mi i
Denotámos por Iz o momento de inércia em relação ao eixo de rotação Oz, por
exemplo no caso c) do disco da Fig. 5, mas é claro que qualquer outro eixo
perpendicular a Oz e que passe pelo centro de massa é também um eixo de
simetria. Assim, é possı́vel definir dois outros momentos de inércia, Ix e Iy
339
Figure 5: Diferentes distribuições de uma mesma massa M relativamente ao
eixo Oz. a) barra; b) cilindro; c) disco. Os momentos de inércia verificam a
desigualdade: Iz (R1 ) < Iz (R2 ) < Iz (R3 ).
relativos a dois novos eixos perpendiculares a Oz e perpendiculares entre si.
Chamam-se principais momentos de inércia do corpo às três quantidades
(Ix , Iy , Iz ). No caso particular do disco, teremos, como é evidente, Ix = Iy 6= Iz .
Também se verificam as seguintes proposições, aqui apresentadas sem demonstração.
Proposição: Em qualquer corpo rı́gido, a soma dos momentos de inércia relativo a qualquer dos três eixos rectangulares traçados a partir de um dado ponto
fixo no corpo é constante, para qualquer posição desses eixos:
Ix + Iy + Iz = const.
(15.11)
Proposição: Em qualquer plano que passa por um dado ponto fixo do corpo, os
eixos de maior e menor momento de inércia, para esse plano, fazem um ângulo
recto um com o outro.
Para compreedermos, fixemos um dos eixos, o eixo Oz, por exemplo, sendo o
respectivo momento Iz . Portanto, Ix + Iy = Const. Logo, quando Iz é um
máximo, Iy é um mı́nimo para o plano xy, e vice-versa.
Proposição: Se o momento de inércia relativo a qualquer eixo (Ox) que passe
por um ponto fixo do corpo tem o seu valor máximo, então o momento de inércia
relativo a outro eixo (Oz), fazendo um ángulo recto com Ox, terá o seu valor
mı́nimo; e o momento de inércia relativo ao eixo perpendicular restante (Oy)
terá um máximo no plano yz, e um mı́nimo no plano xy.
REVER ESTE RACIOCNO!!!!!!!!!!!!! Seja Ox um eixo de momento de inércia
máximo para o ponto O. Então o eixo com o momento de inércia mı́nimo deve
340
estar no plano que passa por O e lhe é perpendicular. Em seguida, suponhamos
que o eixo mı́nimo é Oz. O momento de inércia relativo ao eixo restante, Oy,
deve ter um máximo para o plano yz. Para Ix fixo, Iy + Iz = Const., e portanto
Iy é um máximo pois que Iz é mı́nimo.
REVER ESTE RACIOCNIO!!!!!!!!
Definio̧es: Os eixos rectangulares correspondentes aos momentos de inércia
máximo, mı́nimo e intermediário são chamados eixos principais do ponto do
corpo a partir do qual foram traçados, e os momentos de inércia respectivos
são chamados momentos de inércia principais para esse ponto. Um plano
que contenha dois desses eixos principais é chamado de plano principal para
esse ponto. Quando o ponto coincide com o centro de massa, os eixos principais
chamam-se principais eixos do corpo e os momentos de inércia, momentos
de inércia principais do corpo.
Proposição: O momento de inércia (IOP ) relativo a qualquer eixo OP fazendo
os ângulos α, β e γ com os eixos principais que passam por qualquer ponto O,
em relação aos quais os momentos de inércia principais são A, B e C, é dado
por:
IOP = A cos2 α + B cos2 β + C cos2 γ.
(15.12)
Os cálculos dos momentos de inércia podem ser muito facilitados com o uso de
dois importantes teoremas que apresentamos em seguida. O teorema dos eixos
paralelos aplica-se a qualquer corpo sólido. O teorema dos eixos perpendiculares
aplica-se somente a corpos planos de espessura muito pequena.
15.2
Teorema dos eixos paralelos
1
O momento de inércia depende da posição do eixo de rotação. Supondo que já
conhecemos o momento de inércia em relação a um eixo qualquer, vamos ver
como se determina o momento de inércia em relação a outro eixo paralelo ao
primeiro.
Seja Ic o momento de inércia em relação a um eixo que passa pelo CM. O
momento de inércia em relação a um dado eixo z é igual a Ic mais o produto
da massa do corpo M pelo quadrado da distância d entre os dois eixos:
Iz = Ic + M d 2 .
(15.13)
Exemplo 3: Barra
Sabemos que o momento de inércia em relação a um eixo que passa pelo meio
é, Ic = M L2 /12. Qual é o momento de inércia em relação a um eixo que passa
pela extremidade?
1 Que também se encontra referido em outras obras como o teorema de Huygens, ou teorema
de Steiner.
341
Figure 6: Aplicação do teorema dos eixos paralelos à barra uniforme.
d = L2
¡ ¢2
2
I = M12L + M L2
2
I = M3L .
15.3
(15.14)
Teorema do eixo perpendicular
Este teorema estabelece uma relação entre os momentos de inércia em relação a
três eixos (mutuamente perpendiculares entre si) de um corpo plano de espessura
muito pequena e de forma arbitrária.
Consideremos uma placa muito fina que pode rodar em torno de qualquer dos
três eixos (Ox,Oy,Oz). Suponhamos que a placa assenta sobre o plano xy. Seja
um ponto O arbitrariamente colocado sobre a placa e um eixo z perpendicular
a ele. O momento de inércia do corpo em relação a z é Iz . Um elemento de
massa dm situado à distância r do eixo contribui com r2 dm, sendo no total
Z
Iz = r2 dm.
(15.15)
A distância do eixo z ao ponto de referência P é dada por:
p
r = x2 + y 2
(15.16)
que assenta no plano xy. Podemos então escrever
Z
Z
2
Iz = x dm + y 2 dm.
(15.17)
342
Figure 7: Placa muito fina que pode rodar em torno de qualquer eixo Ox, Oy,
Oz.
Como o corpo é plano, o primeiro termo do segundo membro representa o momento de inércia em relação ao eixo Ox, Ix e, na mesma lógica, o segundo
termo é Iy . Concluı́mos assim que
Iz = Ix + Iy .
(15.18)
Este resultado é conhecido como o teorema dos eixos perpendiculares.
Exemplo 4: Disco plano uniforme. Seja um disco plano uniforme de massa
M e raio R. Calcule os momentos Ix , e Iy .
O cálculo de qualquer um deles seria complicado, mas a aplicação deste teorema torna-o extremamente simples. Sabemos de um cálculo anterior que
Iz = M R2 /2. Por razões de simetria, temos
Ix + Iy = 2Ix = M2R
2
∴ Ix = M4R .
2
(15.19)
Exemplo 5: Placa quadrada uniforme. Considere uma placa quadrada de lado
a. Determine Ix e Iy . Sabemos que Iz = 16 M a2 . Como por razões de simetria
temos Ix = Iy , obtemos logo
Ix + Iy = 2Ix = Iz =
1
M a2 .
6
(15.20)
Exemplo 6: Placa rectangular. Um corpo tem a forma de um rectângulo de
lado menor a e lado maior b. Quais são os valores dos momentos de inércia em
343
Figure 8: Placa rectangular.
relação aos dois eixos que passam pelo seu centro e são perpendiculares ao seu
plano? (vd. Fig. 8).
Comecemos por determinar Iz . Repare na Fig. 8. Um elemento de massa
dm = σdS onde σ é a densidade superficial de massa, σ = M/(ab) e dS = dxdy
é o elemento diferencial de superfı́cie.
Z
Z
Iz = r2 dm =
r2 σdxdy
(15.21)
S
Mas a integração na varável x deve ir de 0 a a/2 e o mesmo para y que deve
ir de 0 a b/2. No final devemos ainda multiplicar por 4 para obter a superfı́cie
total:
R a/2 R b/2 2
R b/2 R a/2 2
Iz = 4 M
x dy + 0
y dx
ab ( 0
0 3
0
M a b
b3 a
(15.22)
= 4 ab ( 3×8 2 + 3×8 2 )
M
2
2
= 12 (a + b ).
O cálculo de Ix é mais fácil. É semelhante ao cálculo de uma barra fina.
R b/2
Ix = −b/2 y 2 dm
R b/2
= −b/2 y 2 λdy
(15.23)
b3
= λ2 3×8
2
= M12b ,
onde λ = M/b. Um cálculo análogo permite-nos concluir que Iy = M a2 /12.
Exemplo 7: Uma corda de massa desprezável encontra-se enrolada em torno
de um sólido cilı́ndrico de massa M e raio R. Uma massa m é presa à corda e
é largada da altura h acima do solo, tal como se encontra ilustrado na Fig. 9.
Assumindo que o movimento não é submetido a alguma força de frição, determine a rapidez da massa m e a velocidade angular do cilindro quando m atinge
o solo.
Repare que o conjunto mecânico não possui inicialmente energia cinética, mas
tem energia potencial U . No final, imediatamente antes de a massa m colidir
com o solo, m e M possuem ambas energia cinética.
344
M
R
m
h
Figure 9: Com a rotação do cilindro, a corda desenrola e a massa m cai no solo
da altura h.
345
QuadroNegro 2
Exemplo de revisão: Uma das partes constituintes dum mecanismo comporta
→
uma peça (Fig. 10) que efectua um movimento de translação de velocidade −
u e
uma haste AB de comprimento L e massa M , ligada à peça exterior por meio
de um eixo A. Calcule a energia cinética da haste quando ela forma um certo
ângulo α com a vertical.
QuadroNegro 3
346
B
α
C
u
vr
A
ω
u
Figure 10: Mecanismo comportando uma peça que efectua um movimento de
translação de velocidade u e uma haste AB de comprimento L e massa M, ligada
à peça exterior por meio de um eixo A.
347
Figure 11: O momento angular L de uma partı́cula de massa m e momento p
localizado a uma distância r é um vector dado por L = [r × p].
15.4
Momento angular de uma partı́cula
→
Considere uma partı́cula de massa m localizada à distância −
r de uma origem
−
→
−
→
O e movendo-se com velocidade v . O momento angular instantâneo L da
partı́cula relativa à origem O é definido pelo produto externo do seu vector
→
posição instantâneo pelo seu momento linear instantâneo −
p (Vd. Fig. 11):
cujo módulo é dado por:
−
→
→
→
L = [−
r ×−
p ],
(15.24)
→
−
| L |= rp sin φ.
(15.25)
A sua unidade no sistema SI é kg.m/s2 .
→
−
O módulo e direcção de L dependem do sistema de coordenadas. A direcção de
−
→
−
−
L é perpendicular ao plano que contém →
r e →
p , como ilustra a Fig. 12. Em
→
−
→
−
−
→
particular, L = 0 se r for paralelo a p .
Geometricamente:
−
• r⊥ - distância na perpendicular entre a origem e o vector →
p;
−
→
• p⊥ - componente de →
p perpendicular a −
r.
−
→
−
→
• L = [→
r ×−
p ].
Em particular, para o caso da Fig. 12 verifica-se:
Lz = r⊥ p = rp⊥ .
348
(15.26)
Figure 12: Lz = r⊥ p ou Lz = rp⊥ .
Para o cálculo do momento angular pode-se usar
−
→ −
→
i
j
−
→
→
−
−
→
L = [ r × p ] = rx ry
px py
a notação matricial:
−
→
k
(15.27)
rz .
pz
Exemplo 8: Partı́cula em movimento numa linha recta.
Assuma que :
−
→
→
• F ext = 0, −
v = const.
−
→
• A direcção de L = const.
→
−
• O módulo de L = const.
−
→
−
→
Já sabemos que L = rp sin φ k .
−
→
−
→
−
−
Se →
r e →
p se encontram no plano xy, L aponta ao longo do versor k (Vd.
Fig. 14).
Se o vector posição da partı́cula parecer mover-se em torno de um dado ponto O
que podemos ter como origem, então a partı́cula terá certamente um momento
angular não nulo. Se o vector posição somente decresce ou aumenta em módulo,
isso significa que a partı́cula está a mover-se ao longo de uma linha que passa
pela origem (do vector posição) e o momento angular é nulo.
Este exemplo mostra quanto importante é a escolha da origem das coordenadas.
Deve-se sempre escolher uma origem antes de proceder ao cálculo do momento
angular.
Exemplo 9: Partı́cula em movimento circular uniforme.
Considere uma partı́cula no extremo de uma corda. É na verdade uma situação
semelhante ao da Terra e outros planetas em torno do Sol. Escolha-se uma
origem no centro do cı́rculo, tal como se vê na Fig. 14.
349
Figure 13: A distância entre a origem e a linha do movimento é r sin θ.
Figure 14: Partı́cula em movimento uniforme circular. O vector L é perpendicular ao plano do cı́rculo.
350
→
−
→
−
L = [−
r ×→
p]
(15.28)
−
→
−
→
−
→
−
→
L = rp k = mrv k = (mr2 )ω k .
−
→
Como o movimento é uniforme, L permanece constante em módulo e direcção.
Neste exemplo há forças actuando sobre a partı́cula:
2
ac = vr
2
Fc = mv
r
(15.29)
A força centrı́peta actua na direção do centro do cı́rculo que foi tomada como
origem. É importante notar que se tivessemos escolhido qualquer outra origem,
−
→
L não teria sido constante.
Exemplo 10: Momento angular do pêndulo cónico.
Assuma que o pêndulo descreve um movimento circular com velocidade angular
ω. Escolha a origem em A, como o mostra a Fig. 15-(a).
→
−
→
−
L = [−
r ×→
p]
→
−
= rp k
(15.30)
onde r é o raio do cı́rculo descrito pela massa M . Temos sucessivamente
p = mv = mrω
−
→
→
−
L A = mr2 ω k
(15.31)
−
→
Repare que L A é constante em módulo e direcção.
Escolha agora uma origem em B (no pivot). Obtemos agora
−
→
→
−
| L B |=| −
r 0×→
p |
−
→
−
→
0
=| r || p |
= M vL = M rLω
(15.32)
→
onde | −
r 0 |= L é o comprimento da corda (vd. Fig. 15-(b)). Repare que o
→
−
módulo de L B não é constante porque depende da localização do pivot B e a
direcção também não é constante, como é claro na Fig. 15-(c).
Sendo B um ponto fixo, o módulo de LB é constante, mas a direcção traça um
cone em cada rotação.
→
−
A componente em z de L B é constante, enquanto que a componente horizontal
(Fig. 15-(c)) traça um cı́rculo com velocidade angular ω.
351
Figure 15: Pêndulo cónico.
352
15.5
Movimento de rotação de um sólido rı́gido. Equação
dos momentos
Vamos determinar qual a grandeza fı́sica que é responsável pela variação do vec−
→
→
−
tor L num sistema de referência dado. Diferenciando L em ordem ao tempo,
obtemos
→
−
−
d −
dL
= dt
[→
r ×→
p]
dt
→
−
−
→
→
−
−
dr
d→
(15.33)
= dt × p + r × dt
p
−
→
→
−
−
→
→
d−
= v × (m v ) + r × dt p ,
O primeiro termo do segundo membro da última equação é nulo (porquê?). Ficamos assim com a equação dos momentos:
−
→
−
→
dL
−
= [→
r × F ].
dt
−
→
−
→
→
−
−
Se se verificar →
r × F temos d L /dt = 0, isto é, L conserva-se.
(15.34)
Proposição I: A taxa de rotação de um corpo rı́gido em rotação em torno
de um eixo fixo não pode ser modificada, excepto pela aplicação de um torque
externo
Num conjunto de N partı́culas temos que somar sobre todas elas:
N
N
i=1
i=1
X
−
→ X−
→
−
−
L =
Li =
[→
r i×→
p i ],
(15.35)
e a Eq. 15.85 generaliza-se de imediato a N momentos:
−
→ X
X
−
→
dL
→
−
→
=
[−
r i × F i] =
τ i.
dt
i
i
(15.36)
−
→
−
→
→
A fim de obtermos d L /dt = 0, devemos necessariamente ter −
r × F = 0, isto
é, devem-se verificar as seguintes condições:
−
→
→
• F deve ser paralelo a −
r.
−
→
• F deve apontar para dentro ou para fora da origem, isto é, deve ser uma
força central.
→
−
−
→
• Se F é central, tem-se d L /dt = 0.
Obtemos assim a lei da conservação do momento angular:
→
−
• ⇒ L é constante.
353
Figure 16: Cometa.
−
→
Se a força é não-central, L não se conserva.
−
→
→
A grandeza −
r × F chama-se momento da força ou torque 2 :
→
−
→
−
→
τ = [−
r × F]
(15.37)
−
→
dL
→
=−
τ.
(15.38)
dt
Esta é a equação fundamental da dinâmica do corpo rı́gido: a taxa de variação
temporal do momento angular iguala o momento da força (ou torque). Ambos
−
→
−
os vectores →
τ e L devem ser referidos à mesma origem O de um sistema de
coordenadas inercial.
Exemplo 11: Cometas.
Um cometa descreve uma elipse em torno do sol com um apogeu (distância
−
maior) e um perigeu (distância menor). Nesses pontos o vector posição →
r ea
−
→
velocidade v são perpendiculares um ao outro, como ilustra a Fig. 16.
QuadroNegro 4
2 Em
inglês chama-se “torque” e usaremos neste texto as duas expressões indiferentemente.
354
Por exemplo, os dados relativos ao cometa Halley são os seguintes:
• r1 = 8.75 × 1010 m e v1 = 5.46 × 104 m/s no perigeu
• r2 = 5.26 × 1012 m, no apogeu.
• ⇒ v2 =
8.75×1010
5.26×1012
× 5.46 × 104 = 9.08 × 102 m/s.
Exemplo 12: Carrossel
Uma plataforma com o formato de um disco circular de raio R e massa M roda
sem atrito em relação ao eixo vertical (Vd. Fig. 17). Um estudante de massa m
caminha devagar desde o perı́metro em direcção ao centro. A velocidade angular
do conjunto quando o estudante se encontra no perı́metro é ωi .
• R = 2.0 m.
• M = 100 kg e m = 60 kg.
• ωi = 2 s−1 .
a) Calcule ω quando o estudante está à distância r = 0.5 m do centro.
O momento de inércia é o do conjunto (plataforma + estudante):
Ii =
1
M R2 + mR2 .
2
(15.39)
Quando o estudante está na posição r < R, o momento de inércia éP(lembre-se
que tem que ser o somatório dos momentos de inércia, porque I = i ri2 dmi ):
If =
1
M R2 + mr2 .
2
(15.40)
Não havendo algum momento de força externa em relação ao centro do disco
que actue no sistema (plataforma + estudante), o estudante caminha para o
centro O com o momento angular constante, Li = Lf .
Portanto tem-se:
Ii ωi = If ωf
( 12 M R2 + mR2 )ωi = ( 12 M R2 + mr2 )ωf
( 12 M R2 +mR2 )
ωi
( 12 M
´R2 +mr2 )
200+240
(2) = 4.1rad/s.
200+5
ωf =
³
ωf =
(15.41)
b) Calcule a energia cinética inicial e final.
Ki = 12 Ii ωi2 = 12 (440)22 = 880J
Kf = 12 If ωf2 = 12 (215)4.12 = 1800J.
355
(15.42)
Figure 17: Plataforma + estudante em movimento de rotação.
Verifica-se um aumento da energia cinética. Este acréscimo provém do trabalho
efectuado pelo estudante ao caminhar do perı́metro para o centro do disco. Isto
significa que as forças internas dentro do conjunto mecânico realizaram trabalho.
O estudante encontra-se num referencial acelerado, não-inercial e sente uma
força centrı́fuga que varia com r. Por sua vez, ele exerce uma força de reação
que efectua trabalho, W , e , de acordo com o teorema trabalho-energia cinética,
W = ∆K tal resulta num incremento de K.
15.6
Dinâmica do corpo rı́gido
Da equação fundamental da dinâmica rotacional compreedemos que quando uma
força é aplicada de tal forma que a sua direcção não passa pelo eixo de rotação,
será comunicada ao corpo um movimento rotacional. A tendência de um corpo
→
para rodar é determinada pelo momento da força ou torque 3 , −
τ.
−
→
→
Considere a acção da força F sobre uma partı́cula tendo o vector posição −
r.
O momento da força em relação à origem do sistema de referência é:
→
−
→
−
→
τ = [−
r × F]
τ = rF sin θ,
(15.43)
−
→
→
→
O vector −
τ aponta numa direcção perpendicular ao plano definido por −
r e F.
3A
palavra torque exprime “poder de rotação”. Provém do Latim, torqueo, Eu rodo.
356
Figure 18: O torque τ aponta numa direcção perpendicular ao plano formado
pelo vector posição r e pela força aplicada F .
357
Figure 19: braços da força.
−
→
→
Repare que podemos fazer duas projecções, ou do vector −
r sobre F , ou viceversa:
• (a) d = r sin θ: o braço da força: é a distância perpendicular desde o eixo
→
−
de rotação até à linha de acção de F ; ou seja, momento da força=braço
vezes força
−
→
→
τ =| −
r ⊥ || F |
(15.44)
−
→
• (b) Se representarmos F em termos das suas componentes, temos: Ft =
→
F⊥ , componente perpendicular a −
r , Ft = F sin θ; Fk = F cos θ, compo−
→
nente paralelo a r . Assim τ =distância radial vezes força transversa.
→
−
→
τ =| −
r || F t |
(15.45)
Concluindo:
• Fk não contribui para o momento da força ou rotação;
→
• −
r k não contribui para o momento da força ou rotação.
No Sistema S.I. a unidade fı́sica de τ é o N.m. Se bem que tal seja igual ao
joule, não se usa esta unidade no torque.
Há que distinguir força do momento da força, como se depreende dos três casos
apresentados na Fig. 20.
Oscilações elásticas: Qualquer conclusão obtida no estudo do movimento
linear pode ser transposta para o movimento rotacional, desde que estabeleçamos
a seguinte analogia
• momento de inércia ⇔ Massa;
• torque ⇔ Força;
358
Figure 20: Força e momento da força.
• distância angular θ ⇔ distância linear.
p
Resulta daqui que, p
se antes tı́nhamos T = 2π m/k, no movimento angular deveremos ter T = 2π I/R, onde R representa aqui o rácio R =torque/deslocamento
angular.
Exemplo 13: Determine o perı́odo das oscilações de um pêndulo simples de
comprimento l e massa m.
Quando o deslocamento é θ, o momento (ou o torque) das forças restauradoras
é
τ = mgl sin θ
≈ mglθ quando θ é pequeno
(15.46)
mglθ
=
=
mgl
∴ R = momento−do−binario
deslocamento
θ
O momento de inércia é I = ml2 e, portanto,
q
I
T = 2π R
q
ml2
= 2π mlg
q
= 2π gl .
(15.47)
Exemplo 14: Momento das forças actuando num cilindro.
−
→
→
−
Duas forças F 1 actuando no raio R1 e F 2 actuando no raio R2 produzem um
momento de forças resultante por meio da corda enrolada em torno do cilindro,
como ilustra a Fig. 21.
−
→
→
A força F 1 tem o braço R1 e exerce um momento no sentido horário; −
τ é
dirigido para dentro da folha, consideremo-lo negativo:
τ = −F1 R1 .
(15.48)
−
→
→
O momento da força F 2 é dirigido no sentido anti-horário (−
τ é agora dirigido
para fora da folha), portanto positivo:
τ2 = +F2 R2 .
359
(15.49)
Figure 21: Um cilindro pode rodar em torno do eixo z que passa por O. O braço
do torque da força F1 é R1 e o braço do torque da força F2 é R2 .
O momento resultante é:
τres = τ1 + τ2 = −F1 R1 + F2 R2 .
(15.50)
Suponhamos que os dados numéricos são os seguintes:
F1 = 5N
F2 = 6N
R1 = 1.0m
R2 = 0.5m
(15.51)
donde se obtém
τres = −(5)(1) + (6)(0.5) = −2N.m
(15.52)
O momento da força é negativo e portanto o movimento resultante é no sentido
horário.
15.7
Sistema isolado. Forças internas
Sejam duas forças centrais iguais e opostas. Tem-se
−
→
−
→
−
→
r 1 × F 12 = −F12 r1 sin θ1 k
→
−
−
→
−
→
r 2 × F 21 = F21 r2 sin θ2 k
(15.53)
Verifica-se a seguinte relação geométrica, como se depreende da Fig. 22:
r1 sin θ1 = r2 sin θ2
(15.54)
−
→
Ora a lei da acção-reacção aplica-se aos pares de forças (centrais), F 12 =
−
→
− F 21 , logo os momentos anulam-se internamente para um sistema de forças
P − ext
−
→ P −
→
centrais. Se igualmente se verificar i →
τ i = 0, conclui-se que L = i L i é
constante-lei da conservação do momento angular.
360
Figure 22: As forças centrais que duas partı́culas exercem uma sobre a outra
são iguais em módulo e de sentido contrário.
15.8
Dinâmica rotacional: aceleração angular ou torque
Considere uma partı́cula em movimento circular de raio r sob a acção de uma
−
→
força tangencial F t . Esta força produz uma aceleração tangencial at :
Ft = mat
(15.55)
−
→
O torque de F em torno da origem é dado por
τ = Ft r = (mat )r.
(15.56)
A aceleração tangencial está relacionada com a aceleração angular α pela
seguinte relação:
at = rα
∴ τ = (mr2 )α
(15.57)
τ = Iα
O torque que actua sobre a partı́cula é proporcional à aceleração angular. Este
é o análogo rotacional da Segunda Lei de Newton.
Binário: Uma força única não é capaz de transmitir a um corpo rı́gido um
movimento de rotação pura. O sistema de forças mais simples capaz de transmitir uma rotação pura consiste em duas forças iguais e opostas, que não estão
na mesma linha de aplicação, o chamado binário.
361
Figure 23: Um corpo rı́gido roda em torno dum eixo que passa pelo ponto
O. Cada elemento de massa dm roda em torno de O com a mesma aceleração
angular α, e o torque resultante actuando sobre o corpo é proporcional a α.
15.9
Dinâmica do corpo rı́gido: rotação em torno de um
eixo fixo
Considere a rotação de um corpo rı́gido em torno de um eixo fixo. Um corpo
é constituı́do por um número praticamente infinito de elementos de massa dm.
Cada massa dm roda em torno da origem e tem uma aceleração tangencial at
produzida por Ft . De acordo com a Segunda Lei de Newton, temos assim
dFt = (dm)at
(15.58)
dτ = rdFt = (rdm)at .
(15.59)
dτ = (rdm)rα = (r2 dm)α.
(15.60)
O torque respectivo é dado por
Ora, temos at = rα:
Os diferentes pontos (ou partı́culas) que compõem o corpo rı́gido têm diferentes
at , mas o mesmo α. Por integração, obtemos
Z
Z
(15.61)
τres = (r2 dm)α = α r2 dm
ou seja
−
→
→
τ res = I −
α.
(15.62)
Exemplo 15: Uma corda está enrolada em torno de um cilindro de massa M
e raio R (Fig. 24). O cilindro pode rodar livremente em torno do seu eixo.
362
Figure 24: Corda enrolada em torno do cilindro de massa M e raio R.
−
→
A corda é puxada tangencialmente por uma força constante T . Sabe-se que:
M = 15 kg, R = 6 cm, T = 2 N.
a) Qual é a aceleração angular do cilindro?; b) Qual é a rapidez angular quando
t = 2 s?
→
−
−
τ = I→
α.
QuadroNegro 5
363
(15.63)
Exemplo 16: Como se encontra ilustrado na Fig. 25, uma massa m1 desliza
sem frição sobre uma superfı́cie horizontal. A polia é um pequeno cilindro de
massa M e raio R. A corda encontra-se ligada à massa m2 e puxa a massa m1
sem derrapar na polia.
Analisando os digramas das forças que acutam sobre cada um dos corpos obtemos:
T1 = m1 a1
m2 g − T2 = m2 a2
(15.64)
T2 R − T1 R = Iα = (M R2 )α
Como a corda é inextensı́vel, a1 = a2 = Rα. Assim, as equações anteriores
podem-se escrever de novo na forma
T1 = m1 a1
m2 g − T2 = m2 a1
T2 − T1 = M a1
(15.65)
Resolvendo em ordem a a1 obtém-se
a1 =
assim como as tensões
m2 g
m1 + m2 + M
1 m2
T1 = m1m
+m2 +M
(m1 +m2 )m2 g
T2 = m1 +m2 +M
(15.66)
(15.67)
2g
Se M = 0 então a1 = mm
e T1 = T2 , caso já estudado no âmbito da
1 +m2
cinemática sem momentos de inércia.
15.10
Conservação do momento angular e energia cinética
A conservação do momento angular traz implicações interessantes no que diz
respeito à energia cinética total de um sistema mecânico que varia na forma e
na sua dimensão.
Podemos considerar um sistema de duas partı́culas rodando no sentido antihorário em torno do seu centro de massa. As velocidades de cada uma das
massas são v1 = r1 ω e v2 = r2 ω, donde resulta o momento angular Lc (o C
vem de CM):
Lc = (r1 p1 ) + (r2 p2 )
(15.68)
Repare que somamos porque o momento angular de cada uma das partı́culas
orienta-se na mesma direcção. Continuando o cálculo, obtemos
Lc = (m1 r12 ω + m2 r22 ω) = Ic ω
Substituindo no termo da energia cinética, obtemos
µ ¶2
1
1
Lc
2
K = Ic ω = Ic
,
2
2
Ic
364
(15.69)
(15.70)
Figure 25: Problema das duas massas e uma polia.
365
Figure 26: Duas partı́culas de massa m estão nas extremidades de uma haste
que faz um ângulo θ com o eixo de rotação.
ou seja
K=
L2c
.
2Ic
(15.71)
Exemplo 17: Duas partı́culas de massa m encontram-se nas extremidades de
uma haste de massa desprezável. A haste faz um ângulo θ com o eixo z (Vd.
Fig. 26).
QuadroNegro 6
366
Figure 27: Conservação do momento angular em relação a um eixo fixo.
Em resumo:
−
→
→
→
• L = I−
ω : o momento angular varia em proporção com −
ω . I representa
uma propriedade inercial do corpo e mede a sua resistência à variação do
momento angular.
→
−
→
• −
p = m→
v : o momento varia proporcionalmente à velocidade −
v . A massa
mede a resitência do corpo a variações da velocidade.
Veja-se a analogia:
K=
L2z
2I
⇔K=
p2
2m
(15.72)
Suponha que o momento angular dum sistema mecânico em relação a um dado
eixo z é constante, Lz = constante.
Se o sistema contrai-se e I decresce, a energia cinética aumenta. Mas, para que
tal aconteça, é necessário que haja uma fonte de energia.
Quando estrelas ou galáxias colapsam, a fonte é a gravidade. A energia potencial
gravitacional é negativa e aumenta em módulo à medida que os objectos se
contraem. É o que sucede à bailarina quando os seus braços e pernas são puxados
para dentro e alinhados com o eixo de rotação (Vd. Fig. 27).
Como vimos a equação fundamental da dinâmica rotacional e´
−
→
X
dL
→
−
→
→
=−
τ tot =
τ ext
+−
τ int
i
i .
dt
i
−
τ tot = 0, obtemos a lei da conservação do momento angular:
Se →
O momento angular total dum sistema isolado conserva-se.
367
(15.73)
Figure 28: Exemplo 18.
No caso de um corpo rı́gido em rotação em relação a um eixo fixo z com τz = 0,
a conservação do momento angular reduz-se às seguintes expressões:
dLz
dt
= 0 ⇒ τz = 0
Lz = const. ⇒ Li = Lf
Iω = const.
Ii ωi = If ωf
(15.74)
Exemplo 18: Um objecto de massa m presa numa corda está à distância r1 de
um centro O em torno do qual move-se circularmente com velocidade angular
ω1 (Fig. 28).
A corda é encurtada até ter um novo raio r2 . Qual é a nova velocidade angular
adquirida pelo objecto?
QuadroNegro 7
368
Exemplo 19: Momento angular induzido num electrão por um campo de
−
→
indução magnético externo B : Uma partı́cula de massa m e carga q movese numa trajectória circular de raio r sujeita a uma força do tipo central. A sua
coordenada angular é θ. Um campo magnético é criado perpendicularmente à
órbita da partı́cula, ao longo do eixo Oz. Segundo a lei da indução de Faraday,
é induzido um campo eléctrico tangente ao cı́rculo, Eθ :
Eθ = −
1 dBr2
.
2r dt
(15.75)
a) Qual é a força que aje sobre a partı́cula?
Fθ = qEθ
(15.76)
−
→
b) Calcule o torque e o momento angular induzido quando o campo B atinge o
seu valor estacionário.
O torque é dado por:
τ = rFθ
2
τ = − 2q dBr
dt
dirigido segundo Oz.
(15.77)
2
= − 2q dBr
dt 2
Lz = Lz (0) − qr2 B.
dLz
dt
(15.78)
Para uma carga negativa q = −e, tem-se
∆Lz = +
eB 2
r
2
(15.79)
Existe uma relação fundamental entre o momento angular e o momento magnético
−
→
M:
−
→
→
q −
M=
(15.80)
L
2m
e, neste caso, obtemos
e2 B 2
∆Mz = −
r .
(15.81)
4m
Podemos verificar que o momento magnético induzido é sempre oposto ao campo
B.
Exemplo 20: Roda de bicicleta em rotação.
Um sujeito sentado num banco rotatório sustém uma roda de bicicleta, tal como
é mostrado na Fig. 29. Ele encontra-se inicialmente em repouso. A roda revolve
→
−
no plano horizontal com momento angular inicial L o dirigido para cima.
Quando a roda é invertida dum ângulo de 180o o que acontece?
O sistema é constituı́do pelo estudante + roda + banco.
369
Figure 29: Sujeito sobre um banco rotatório + roda.
−
→
O momento angular total é L o , o que se deve unicamente ao movimento inicial
da roda.
Quando o sujeito fornece um torque (interno ao sistema), a roda inverte-se da
forma pretendida. Não existem torques externos em ralação ao eixo vertical
actuando no sistema. Em consequência, o momento angular total conserva-se.
−
→
→
−
Inicial: L sist = L o
−
→
−
→
−
→
Final: L sist = L sujeito+banco + L roda .
→
−
→
−
−
→
L o = L sujeito+banco + L roda
→
−
→
−
−
→
(15.82)
L o = L sujeito+banco − L o
−
→
−
→
∴ L sujeito+banco = 2 L o
Se designarmos o momento de inércia do conjunto sujeito + banco, Ip , então
podemos escrever
Ip ωp = 2Io ωo
(15.83)
15.11
Trabalho e energia no movimento rotacional
Uma força que actua sobre um corpo e o põe em movimento efectua trabalho
−
→
sobre esse corpo. O trabalho efectuado pela força F fazendo com que o corpo
370
Figure 30: Um corpo rı́gido roda em torno de um eixo que passa pela origem O
sob a ação de uma força externa aplicada em P .
rode de um arco elementar ds = rdθ no intervalo de tempo dt é dado por:
−
→ →
dW = ( F · d−
s ) = (F sin φ)rdθ,
(15.84)
→
−
onde F sin φ é a componente tangencial de F . A componente radial não realiza
→
−
trabalho porque é perpendicular a d s (Vd. Fig. 30).
O torque exercido pela força é
τz = (F sin φ)r
(15.85)
e o trabalho elementar associado
dW = τz dθ
Rθ
W = θ12 τz dθ.
(15.86)
Se o torque for constante tem-se
W = τz ∆θ.
(15.87)
Observe que esta medida do trabalho efectuado é exactamente análoga ao trabalho
feito por uma força no movimento rectilı́neo.
A potência associada ao trabalho por unidade de tempo é dada por
P =
dW
dθ
= τz
= τz ω.
dt
dt
371
(15.88)
Figure 31: Uma força aplicada a um corpo em rotação realiza trabalho nesse
corpo.
15.12
Teorema do trabalho-energia no movimento rotacional
O trabalho efectuado pelo torque produz uma variaçao da energia cinética do
corpo de acordo com a sequência:
τ →α
ω1 → ω2 .
De facto, verificamos que
τ = Iα = I
dω
dω dθ
dω
=I
= I ω,
dt
dθ dt
dθ
(15.89)
ou seja:
τ dθ = dW = Iωdω.
(15.90)
Finalmente, o trabalho total efectuado é assim dado pelo somatório dos trabalhos
elementares
Z θ2
Z ω2
1
1
0
W =
τ dθ =
Iω 0 dω 0 = Iω22 − Iω12 .
(15.91)
2
2
θ1
ω1
1 2 1 2
Iω − Iω .
(15.92)
2 2 2 1
Se a força actuante fôr conservativa (ex: força gravı́tica, elástica, electrostática),
o trabalho realizado é o negativo da variação da energia potencial:
W = ∆K = Kf − Ki =
−∆U = −U2 + U1 =
372
1 2 1 2
Iω − Iω .
2 2 2 1
(15.93)
Isto é,
1 2
1
Iω + U1 = Iω22 + U2 .
2 1
2
No movimento rotacional a energia mecânica total conserva-se:
E=
1 2
Iω + U = Const.
2
(15.94)
(15.95)
Exemplo 21: Massas ligadas.
Duas massas encontram-se ligadas por uma corda que passa por uma polia com
momento de inércia I (Fig. 32). Quais são as velocidades lineares das massas
depois de se moverem da altura h?
Como é suposto não haver atrito, a energia mecânica conserva-se:
E1 = E2
K1 + U1 = K2 + U2
0 = 12 m1 v 2 + 12 m2 v 2 + 12 Iω 2 + m1 gh − m2 hg.
Mas sendo v = Rω, obtém-se de imediato
s
2(m2 − m1 )gh
v=
.
m1 + m2 + RI2
(15.96)
(15.97)
Podı́amos ter seguido um processo de resolução diferente, obtendo primeiro τ =
Iα, resolvendo depois para α e 2ah = v 2 , a = αR, e daqui finalmente obtendo
v.
15.13
Impulso angular
Mostrámos previamente que se definirmos um impulso linear
Z t2
−
→
−
→
I =
F (t)dt
(15.98)
t1
→
−
→
−
a variação do momento linear ddtp = F no intervalo de tempo ∆ = t2 − t1 é tal
que
−
→
→
→
−
∆−
p =−
pf −→
pi = I.
(15.99)
De modo semelhante, partindo da equação fundamental da dinâmica rotacional
−
→
dL
→
=−
τ,
(15.100)
dt
podemos escrever
−
→
−
→
→
−
−
Lf − Li = ∆L = →
τ ∆t
→
−
= J
Rt →
→
−
∴ J = t12 −
τ dt
373
(15.101)
Figure 32: Duas massas ligadas por uma corda suspensa numa polia.
Verificamos assim que a variação do momento angular é igual ao impulso angular.
Exemplo 22: Considere um sistema mecânico constituı́do por dois discos com
momentos de inércia I e I 0 , cada um deles em rotação com velocidades angulares
ω e ωo0 (Vd. Fig. 33). A seguir, os dois discos são colocados um sobre o outro
por ação de uma força externa que actua paralelamente ao eixo de rotação. No
estado final, os dois discos rodam com velocidade angular final ω.
QuadroNegro 8
374
Figure 33: Dois discos rodam na configuração final com velocidade angular ω.
375
Figure 34: (a)-Na rotação de um cilindro sem deslizamento de um ângulo θ, o
seu CM desloca-se de uma distância s = Rθ; (b)-Todos os pontos de um corpo
ao rodar movem-se numa direção perpendicular ao eixo que passa pelo ponto
de contacto P . O CM move-se com velocidade vc , enquanto que o ponto P 0
move-se com velocidade 2vc .
15.14
Cilindros/esferas a rolar
Quando um cilindro de raio R rola (sem deslizar) sobre uma superfı́cie horizontal de um ângulo θ (Fig. 34-(a)) o seu CM move-se de uma distância s = Rθ.
A velocidade e a aceleração do CM para a rotação sem derrapagem são dadas
pelas expressões conhecidas
dθ
vc = ds
dt = R dt = Rω
dvc
ac = dt = R dω
dt = Rα
(15.102)
Apercebemo-nos que os diferentes pontos do objecto têm diferentes velocidades
lineares. A velocidade linear de qualquer ponto está dirigida perpendicularmente
à linha que vai desse ponto ao ponto de contacto P . O ponto de contacto P está
em repouso relativamente à superfı́cie. O eixo que passa por P e é perpendicular
−
a→
v c é o eixo instantâneo de rotação.
376
Um ponto genérico Q localizado sobre o cilindro possui componentes horizontal
e vertical da velocidade. Em particular, os pontos P e P 0 têm especial interesse.
P : vp = 0
C : vc = Rω
P 0 : vP 0 = 2Rω.
(15.103)
Repare que todos os pontos do cilindro possuem a mesma velocidade angular ω.
Assim, podemos concluir o seguinte:
Na translação todos os pontos têm a mesma velocidade v = vc (Fig. 35-(a)).
Na rotação, vc = Rω, todos os pontos têm a mesma velocidade angular ω e a
velocidade linear é proporcional à distância ao eixo de rotação (Fig. 35-(b)).
No movimento combinado de translação e rotação (Fig. 35-(b)), tem-se:
vP = vc − Rω = 0
vc = vc + 0 = vc
vP 0 = vc + ωR = 2vc
(15.104)
O que há de notável neste exemplo é que o efeito combinado da translação do
CM e da rotação em torno de um eixo que passa pelo CM é equivalente a uma
rotação pura com a mesma velocidade angular em relação a um eixo que passa
pelo ponto de contacto do corpo rolante:
K = 12 IP ω 2
IP = Ic + M R2
∴ K = 12 Ic ω 2 + 12 M R2 ω 2
= 21 Ic ω 2 + 12 M vc2
(15.105)
Conclui-se assim que: A energia cinética total de um objecto em rolamento é a soma da energia cinética rotacional em torno do eixo
do CM mais a energia cinética de translação do CM.
Iremos enunciar em seguida dois teoremas sem os demonstrar.
Teorema 1: O deslocamento de um corpo rı́gido pode ser decomposto em dois
movimentos independentes: a translação do centro de massa e a rotação em
torno do CM.
Teorema 2: O movimento de rotação em torno do CM depende somente do
torque em relação ao CM, independentemente do movimento de translação.
15.15
Movimento de rolamento de um corpo rı́gido
Um tipo de movimento rotacional de um corpo rı́gido acontece quando o eixo de
rotação é paralelo a ele próprio, isto é, a sua orientação é constante no espaço.
Situações onde se encontra o movimento combinado de translação e de rotação:
bola, cilindro, roda sobre superfı́cies planas.
377
Figure 35: (a)-Translação; (b)-Rotação; (c)-Translação e rotação.
378
As equações do movimento são:
→
−
dP
dt
→
−
R
→
−
P = M ddtR =
−
d→
r
dm
→
−
− dt P →
2→
− ext
dV
d R
= M dt = M dt R =
F
K = 21 M V 2 + 12 vc2 dm
(15.106)
Para o momento angular temos
→
−
−
→ →
−
L = [R × P ] +
Z
−
→
[→
rc×−
v c ]dm
(15.107)
M
−
→ −
→
−
→
L = L or + L s .
(15.108)
−
→
L or - momento angular orbital do CM em relação à origem.
−
→
L s - momento angular intrı́nseco (ou de “spin”) em relação ao eixo que passa
pelo CM.
Pode-se mostrar que
−
→
dLs
−
=→
τc
(15.109)
dt
→
onde −
τ c é o torque em relação ao CM produzido pelas forças externas. Este
resultado é independente do tipo de movimento do CM que, em especial, pode
ser acelerado. O CM seria neste caso um referencial não-inercial.
O movimento combinado de
relevância. A orientação de
→
−
a L s , embora o módulo possa
translação e rolamento é um caso de especial
−
→
L s é constante no espaço com torque paralelo
variar.
Como o objecto possui um movimento geral de translação do CM com uma
rotação em torno do mesmo CM que se mantém paralelo a si mesmo (ex: sistema
Terra-Sol, Vd. Fig. 36), podemos escrever
τs = Is dω
dt = Is α
K = 12 M V 2 + 12 Is ω 2 .
(15.110)
Exemplo 23: Objecto redondo rolando num plano inclinado (Fig. 37).
Um objecto redondo parte do topo do plano inclinado a partir do estado de
repouso. Supõe-se não haver derrapagem. O movimento de rolamento só é
possı́vel na presença de atrito que produz o torque em relação ao CM.
Não há perda de energia porque o ponto de contacto não se move relativamente
à superfı́cie! A energia mecânica total conserva-se.
K=
=
vc = Rω
¡ v c ¢2 1
1
+¤ 2 M vc2
2 I£c R
1 Ic
2
2 R 2 + M vc .
379
(15.111)
Figure 36: Sistema Terra-Sol.
∆U = −M gh
∆K = −∆U
1 Ic
2
(
2 R2 + M
r)vc = M gh
vc =
2gh
c
1+ MIR
2
(15.112)
.
No caso particular do objecto redondo ser uma esfera, tem-se Ic = 25 M R2 , donde
podemos obter
s
r
2gh
10
vc =
=
gh.
(15.113)
2 M R2
7
1 + 5 M R2
Supondo que a esfera percorre a distância x, qual é a aceleração alcançada?
Sendo h = x sin θ a altura donde parte a esfera, obtemos sucessivamente:
vc2 = 10
7 gx sin θ
vc2 = 2ac x
ac = 57 g sin θ
(15.114)
A aceleração é menor do que a alcançada por um objecto que não rola.
Exemplo 24: Rolamento sem derrapagem, Fig. 38.
Qualquer objecto redondo de raio R e massa M rola em torno do seu CM à medida que desce no plano inclinado de declive θ. Seja I = βM R2 o seu momento
de inércia. Temos que resolver o sistema de equações
P
τc = Ic α
τf P
+ τg + τN = Rf + 0 + 0 = Iα
(15.115)
fx = M g sin θ − f = M ac
380
Figure 37: Objecto redondo rolando sobre plano inclinado. A energia mecânica
conserva-se se não ocorrer derrapagem.
Figure 38: Diagrama de forças de uma esfera sólida rolando sobre um plano
inclinado.
Se o movimento for de rolamento sem derrapagem, temos
vc = Rω;
ac = Rα
I
M g sin θ − R
α = M g sin θ − β MRR
= M g sin θ − βM ac = M ac
sin θ
∴ ac = g1+β
.
(15.116)
2
ac
R
(15.117)
Não havendo derrapagem a frição é estática
fs =
Iα
R
=
fs ≤ µs N
βM R2 1 g sin θ
R
R 1+β ≤ µs M g cos θ
∴ tan θ ≤ µs 1+β
β .
381
(15.118)
Figure 39: Disco sobre superfı́cie lisa.
Para um ângulo superior ao θ determinado pela equação precedente, o objecto
deslizará à medida que rolar no plano inclinado. Porém, se começar a deslizar,
os pressupostos mudam porque v 6= ωR e a 6= αR!
• arco: β = 1;
• cilindro: β = 1/2;
• esfera: β = 2/5.
(ac )esf era = 57 g sin θ;
(ac )cilindro = 23 g sin θ;
(ac )arco = 12 g sin θ.
(15.119)
Exemplo 25: Um disco plano encontra-se sobre uma superfı́cie plana que não
−
→
oferece atrito (Fig. 39). A força F é aplicada na extremidade da corda que se
encontra enrolada em torno do disco. O disco roda em torno do seu eixo vertical
e move-se horizontalmente. Aplicação numérica: M = 2 kg, R = 10 cm, F = 5
N.
a) Aceleração do CM:
ac =
F
5
= = 2.5m/s2 .
M
2
(15.120)
b) Torques:
α=
τc
=
Ic
FR
1
2
2MR
=
2F
2×5
=
= 50rad/s2 .
MR
2 × 0.10
c) Qual é a aceleração do extremo livre da corda?
382
(15.121)
Figure 40: Cilindro em queda.
A velocidade vo da corda no ponto P é a velocidade de P relativa ao CM (vT =
Rω) mais a velocidade do CM relativa à superfı́cie:
vo = Rω + V
dω
o
as = dv
dt = R dt + ac
= Rω + ac = 7.5m/s2 .
(15.122)
Exemplo 26: Cilindro em queda.
Uma corda encontra-se enrolada em torno de cada um dos extremos de um
cilindro sólido (Fig. 40). O cilindro é deixado cair.
Resolvendo, obtém-se
τ c = Ic α
2T R = 12 M R2 α
M g − 2T = M a
a = Rα
(15.123)
a = 23 g
T = 16 M g.
(15.124)
Exemplo 27: O estudante e a prancha.
Um estudante salta para cima de uma prancha (Fig. 41). Qual é a posição da
prancha 1.2 s após o salto?
• massa do estudante : m = 70 kg;
• massa da prancha : M = 50 kg;
• largura da prancha estreita 2b = 5 m;
• superfı́cie horizontal sem atrito;
383
Figure 41: Estudante + prancha.
• velocidade inicial do estudante : v = 3 m/s.
• sistema inicial : prancha + estudante a correr
• sistema final : (prancha + estudante) em movimento como corpo rı́gido.
→
−
Não há forças horizontais e portanto, o momento P hor conserva-se:
QuadroNegro 9
384
Figure 42: Movimento do CM no problema do estudante e da prancha.
No exemplo 27 usamos uma propriedade dinâmica importante:
Existência de um ponto do corpo rı́gido possuindo relações dinâmicas
particulares: Se for aplicada uma força sobre um corpo rı́gido e livre de se
mover de qualqer modo e se essa força passar pelo centro de massa do corpo, esse
corpo ficará animado com um movimento de translacção; se a linha de actuação
dessa força não passar pelo centro de massa, o corpo terá como movimento geral
uma translacção e uma rotação em torno do seu centro de massa
Mostramos na Fig. 43 uma comparação entre as grandezas fı́sicas do movimento
linear e rotacional.
15.16
Giroscópio
Um giroscópio é um dispositivo mecânico basicamente constituı́do por um volante
ou roda em rotação rápida, possuindo uma energia cinética muito superior à sua
energia potencial gravitacional. Foucault definiu em 1852 o giroscópio como um
aparelho que exibe um momento angular forte 4 .
Considere um giroscópio suportado num ponto de suspensão O, tal como se
encontra ilustrado na Fig. 44. Suponha que o movimento do CM é de precessão
4 Léon Foucault, “Sur une nouvelle démonstration expérimentale du mouvement de la terre
fondée sur la fixité du plan de rotation”, Compt. Rend. 35, 421 (1852).
385
Figure 43: Analogias entre as grandezas fı́sicas do movimento linear e rotacional.
em relação ao eixo vertical. O ponto de suspensão (oupivot) do giroscópio oferece
uma reacção que se contrapõe ao peso:
N = M g,
(15.125)
de modo que não há movimento vertical.
O torque em relação à origem O é:
→
− −
→
−
→
τ o = [R × F ]
= M gl sin γ
(15.126)
→
→
−
O módulo é τ = mgl sin γ, a direção é sempre perpendicular a −
ω s e M−
g. →
τ é
−
→
→
−
−
→
normal ao plano definido por ω s e ω p = Ω .
O movimento de um simples giroscópio em torno de um ponto de apoio sem
→
atrito O descreve um movimento de precessão em relação ao eixo vertical −
ωp e
um movimento de rotação (ou spin) em relação ao seu eixo de simetria.
→
→
Assumindo que o movimento de precessão é muito lento, de modo que −
ω ¿−
ω
p
s
e possamos desprezar o momento angular devido à precessão, podemos escrever
∴ Lo ∼ Iωs
→
−
−
dL
=→
τ
(15.127)
dt
Num intervalo de tempo dt a variação do momento angular é dado simplesmente
por
→
−
→
| d L |=| −
τ | dt = M gl sin γdt,
(15.128)
mostrando-se na Fig. 45 a composição dos vectores.
386
Figure 44: O movimento de um simples giroscópio em torno de um ponto de
apoio sem atrito O. O eixo vertical é o eixo de precessão e o eixo do gisroscópio
é o eixo de rotação (ou spin).
Figure 45: Variação do momento angular durante o intervalo de tempo dt.
387
O ângulo dφ varrido pelo eixo no intervalo de tempo dt é naturalmente dado por
dφ =
dL
M gl sin γdt
=
,
Lo sin γ
Lo sin γ
(15.129)
onde se pode definir uma frequência de precessão
Ω = ωp =
M gl
dφ
=
.
dt
Lo
(15.130)
Como se depreende o movimento de precessão é independente do ângulo de
inclinação e de facto o movimento pode ser horizontal.
Podemos reescrever a expresso anterior na forma
ωp Lo sin γ = M gl sin γ
→
−
−
→
→
τ o = [−
ω p × L o]
(15.131)
→
No caso do gisroscópio ser inicialmente largado com −
ω p = 0, ele começa por
cair sob a ação do campo gravı́tico. Surge então um torque que dá lugar ao
deslocamento rotacional e o CM eleva-se até à altura inicial. Em geral acabase por sobrepor um movimento de nutação aos dois movimentos de precessão
e spin, demasiado complexo para se abordar aqui. É extraordinário observar
que em lugar do giroscópio cair sob a acção do seu próprio peso descreve uma
trajectória circular pela acção do torque!
15.17
Dinâmica linear do giroscópio
−
→
−
→ −
→
Sabemos que L o = I −
ω e denotamos a frequência de precessão por Ω = →
ωp e
→
o torque é −
τ.
Portanto
15.18
−
→
−
→
→
τ = [ Ω × I−
ω ].
(15.132)
Precessão giroscópica
Considere 2 partı́culas de massa m ligadas por meio de uma haste rı́gida de
comprimento 2L. O momento angular é Ls em relação ao eixo z. As massas
têm a velocidade vo (Fig. 47).
Suponha que o torque é aplicado durante um intervalo de tempo curto ∆t no
momento em que a haste se encontra ao longo do eixo dos x:
X→
−
−
→
( F + (− F )) = 0,
(15.133)
e o CM não se move.
388
Figure 46: Movimento de precessão de um giroscópio girando em torno do seu
eixo de simetria. A única força externa actuando sobre o giro é a força normal
N e a força gravı́tica M g. A direção do momento angular, L, é ao longo do seu
eixo de simetria.
389
Figure 47: Precessão giroscópica.
390
Ocorre uma variação do momento de cada uma das massas:
−
→
−
→
∆→
p = m∆−
v = F ∆t.
(15.134)
→
→
Portanto ∆−
v é perpendicular a −
v o.
Tal significa que ocorre uma mudança da direção da velocidade e a haste roda
em torno de uma nova direção - o eixo de rotação inclina-se ligeiramente de
um ângulo ∆ϕ:
∆v
F ∆t
∆ϕ ∼
=
(15.135)
vo
mvo
O torque é τ = 2F L e Ls = 2mvo L onde L é o comprimento da haste
∴ ∆ϕ =
F ∆t
mvo
onde
Ω=
=
2LF ∆t
2Lmvo
=
τ ∆t
Ls
∆ϕ
τ
=
∆t
Ls
(15.136)
(15.137)
denota a frequência de precessão, como já foi referido.
Exemplo 28: O giroscópio que faz parte do horizonte artificial para um avião
possui as seguintes caracterı́sticas:
m = 5kg
Ik = 8 × 104 g.cm2
l = 0, 25cm
ω = 2094rad/s
a) Calcule o perı́odo de precessão T =
T =
(15.138)
2π
Ω .
Ik ω
2π
= 2π
= 860s = 14mn20s.
Ω
mgl
(15.139)
b) Quando o giroscópio tem o ponto de suspensão abaixo do centro de massa,
também se chama de pêndulo giroscópio. Pode-se fazerq
corresponder ao seu
perı́odo T um comprimento reduzido L, tal que T = 2π Lg . Calcule o seu
comprimento reduzido L.
L=
Ik2 ω 2
m2 l 2 g
= 180km.
(15.140)
Repare que a velocidade angular da precessão estimulada é cerca de 1.7 × 106
vezes inferior à velocidade angular de rotação em torno do eixo de revolução.
391
Figure 48: Geometria da operação realizada pelo girocompasso. O girocompasso
é semelhante ao giroscópio. É uma bússola que encontra o verdadeiro norte (isto
é, a direção do eixo de rotação da Terra) usando uma roda em rotação rápida
movida por um motor eléctrico. É usado em navios, aviões, ...
392