Geometria Diferencial
Superfı́cies no espaço tridimensional
Prof. Ulysses Sodré
Londrina-PR, 20 de Setembro de 2007.
Conteúdo
1
2
Topologia de Rn
3
1.1
Bola aberta em Rn . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3
1.2
Conjuntos abertos em R3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3
1.3
Propriedades dos conjuntos abertos . . . . . . . . . . . . . . . . . . . . . .
3
1.4
Propriedade de separação de Hausdorff . . . . . . . . . . . . . . . . . . . .
4
1.5
Conjunto fechado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4
1.6
Ponto isolado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4
1.7
Ponto de acumulação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4
1.8
Ponto de aderência . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4
1.9
Caracterização de conjunto fechado . . . . . . . . . . . . . . . . . . . . . .
5
1.10 Conjunto conexo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5
1.11 Conjunto conexo por caminhos . . . . . . . . . . . . . . . . . . . . . . . . .
5
1.12 Conjunto compacto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6
Funções vetoriais de várias variáveis reais
7
2.1
Aplicação vetorial . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7
2.2
Aplicação linear . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7
2.3
Aplicação linear e posto de uma aplicação . . . . . . . . . . . . . . . . . . .
7
2.4
Aplicações contı́nuas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8
2.5
Homeomorfismo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8
2.6
Derivadas direcionais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9
Geometria Diferencial - Superfı́cies em R3 - Ulysses Sodré - Matemática - UEL - 2007
CONTEÚDO
2
2.7
Aplicação diferenciável . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.8
Matriz jacobiana . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.9
Regra da cadeia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.10 Teorema da função inversa . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
3
Superfı́cies no espaço tridimensional
12
3.1
Superfı́cies em R3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
3.2
Parametrização regular para um conjunto S de R3 . . . . . . . . . . . . . . 13
3.3
Curvas coordenadas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
3.4
Vetores tangentes a uma superfı́cie S . . . . . . . . . . . . . . . . . . . . . . 15
3.5
Vetor Normal e Plano tangente a uma superfı́cie S . . . . . . . . . . . . . . 16
3.6
Parametrização de uma superfı́cie pelo gráfico . . . . . . . . . . . . . . . . 17
3.7
Ponto crı́tico, valor crı́tico e valor regular . . . . . . . . . . . . . . . . . . . 17
3.8
Superfı́cie regular como imagem inversa de um valor regular . . . . . . . 17
3.9
Exercı́cios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
3.10 Superfı́cies regradas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
3.11 Mudança de parâmetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
3.12 Superfı́cies orientáveis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
3.13 Vetor normal a uma superfı́cie . . . . . . . . . . . . . . . . . . . . . . . . . . 23
3.14 Superfı́cies de revolução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
3.15 Superfı́cie tubular . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
Geometria Diferencial - Superfı́cies em R3 - Ulysses Sodré - Matemática - UEL - 2007
Seção 1 Topologia de Rn
1
1.1
3
Topologia de Rn
Bola aberta em Rn
Definição 1.1. (Bola aberta de raio r em um ponto) Uma bola aberta de raio r centrada
em um ponto p ∈ Rn , denotada por Br (p), é o conjunto de todos os pontos x ∈ Rn tal que
|x − p| < r. Quando x pertence a esta bola aberta, denotamos tal fato por x ∈ Br (p).
Exemplo 1.1. (Bolas abertas)
1. O conjunto {(x, y) ∈ R2 : x2 + y2 < r2 } é uma bola aberta em R2 .
2. O conjunto {(x, y) ∈ R2 : (x − x0 )2 + (y − y0 )2 < r2 } é uma bola aberta em R2 .
1.2
Conjuntos abertos em R3
Definição 1.2. (Conjunto aberto) Um conjunto A é aberto em Rn se, para cada ponto
p ∈ A, existe uma bola aberta Br (p) de raio r centrada em p inteiramente contida em A.
Exemplo 1.2. (Conjuntos abertos)
1. O intervalo aberto (a, b) é aberto em R.
2. A bola aberta Br (p) é um conjunto aberto em Rn .
3. O conjunto {(x, y) ∈ R2 : x > 0} é um conjunto aberto em R2 .
4. O conjunto {(x, 0) ∈ R2 : x > 0} não é um conjunto aberto em R2 .
1.3
Propriedades dos conjuntos abertos
Proposição 1.3. (Propriedades dos conjunto abertos em Rn)
1. ∅ e Rn são conjuntos abertos em Rn
2. Se (Ak ) é uma coleção de conjuntos abertos em Rn , então, qualquer reunião de conjuntos
dessa coleção é um conjunto aberto em Rn .
3. Se (Ak ) é uma coleção de conjuntos abertos em Rn , então a interseção de conjuntos
dessa coleção é um conjunto aberto em Rn .
Exercı́cio: Será possı́vel demonstrar que
1. a interseção A ∩ B e a reunião A ∪ B são conjuntos abertos em R2 , desde que
A = {(x, y) ∈ R2 : x > 0} e B = {(x, y) ∈ R2 : y > 0}.
2. a interseção de todos os conjuntos abertos da forma geral An = {(x, 0) ∈ R2 : x > 1/n}
é um conjunto aberto em R2 ?
3. a reunião de todos os conjuntos abertos da forma geral An = {(x, 0) ∈ R2 : x > 1/n}
é um conjunto aberto em R2 ?
Geometria Diferencial - Superfı́cies em R3 - Ulysses Sodré - Matemática - UEL - 2007
1.4
1.4
Propriedade de separação de Hausdorff
4
Propriedade de separação de Hausdorff
Proposição 1.4. (Propriedade da separação de pontos em Rn) Se p e q são pontos distintos em
Rn , existem bolas abertas Br (p) e Bs (q), com r > 0 e s > 0, tal que Br (p) ∩ Bs (q) = ∅.
1.5
Conjunto fechado
Definição 1.3. (Conjunto aberto) Um conjunto F é fechado em Rn se o seu complementar
Fc é um conjunto aberto em Rn .
Exercı́cio: Apresentar exemplos de conjuntos fechados em Rn .
1.6
Ponto isolado
Definição 1.4. (Ponto isolado) Um ponto p de um conjunto C em Rn é um ponto isolado,
se existe uma bola aberta Br (p) com r > 0 contendo apenas o ponto p.
1 1
Exercı́cio: Exibir alguns pontos isolados do conjunto C = {( , ) : (m, n) ∈ N2 }.
m n
1.7
Ponto de acumulação
Definição 1.5. (Ponto de acumulação) Um ponto p é ponto de acumulação do conjunto
S em Rn se, toda bola Br (p) possui pontos de S que são diferentes do próprio ponto p.
1 1
Exercı́cio: Exibir um ponto de acumulação do conjunto C = {( , ) : (m, n) ∈ N2 }.
m n
1.8
Ponto de aderência
Definição 1.6. (Ponto de aderência) Um ponto p é ponto de aderência de um conjunto S
em Rn se toda bola Br (p) possui possui pontos de S.
1 1
Exercı́cio: Exibir um ponto de aderência do conjunto C = {( , ) : (m, n) ∈ N2 }.
m n
Geometria Diferencial - Superfı́cies em R3 - Ulysses Sodré - Matemática - UEL - 2007
1.9
Caracterização de conjunto fechado
5
Proposição 1.5. (Ponto de acumulação é ponto de aderência) Se um ponto p é ponto de
acumulação de um conjunto S em Rn , então p é ponto de aderência do conjunto S.
1 1
Exercı́cio: Seja C = {( , ) : (m, n) ∈ N2 }. Exibir um ponto de aderência de C que não é
m n
ponto de acumulação de C.
1.9
Caracterização de conjunto fechado
Proposição 1.6. (Conjunto fechado através de pontos de acumulação) Um conjunto S em Rn é
fechado se, e somente se, S contém todos os seus pontos de acumulação.
1.10
Conjunto conexo
Definição 1.7. (Conjunto conexo) Um conjunto S de Rn é conexo, se Ñ pode decomposto na reunião disjunta de dois conjuntos abertos não vazios de Rn .
Pelo gráfico em anexo, observamos que a interseção de dois conjuntos conexos não
necessariamente é um conjunto conexo.
1.11
Conjunto conexo por caminhos
Definição 1.8. (Conjunto conexo por caminhos) Um conjunto S de Rn é conexo por
caminhos se, dados quaisquer dois pontos p e q do conjunto S, existe uma aplicação
(curva) contı́nua f : [0, 1] → S com f (0) = p e f (1) = q tal que a imagem f ([0, 1]) está
inteiramente contida em S.
Geometria Diferencial - Superfı́cies em R3 - Ulysses Sodré - Matemática - UEL - 2007
1.12
Conjunto compacto
6
Exemplo 1.7. (Conjunto conexo por caminhos) O pente é conexo por caminhos.
Observação 1.1. As definições de conjuntos conexos e conexos por caminhos coincidem
na reta real R, mas em Rn tais definições não são equivalentes.
Exercı́cios: Demonstrar que
1. um conjunto S em R é conexo se, e somente se, S é um intervalo.
2. conjuntos conexos por caminhos sempre são conjuntos conexos.
3. existem conjuntos de R2 que são conexos mas não são conexos por caminhos.
4. se um conjunto S é conexo e aberto em Rn , então S é conexo por caminhos.
1.12
Conjunto compacto
Definição 1.9. (Conjunto limitado) Um conjunto K de Rn é limitado se, existe uma bola
Br (p) contendo inteiramente o conjunto K para todo p ∈ K.
Exercı́cio: Apresentar exemplos de conjuntos limitados em Rn .
Definição 1.10. (Conjunto compacto) Um conjunto K de Rn é compacto se K é limitado
e é fechado em Rn .
Observação 1.2. Existem várias maneiras equivalentes de definir conjuntos compactos.
Exercı́cio: Sobre conjuntos compactos
1. Apresentar exemplos de conjuntos compactos em Rn .
2. Qual é a importância de conjuntos compactos em Rn .
3. Qual é a ligação entre conjuntos fechados e conjuntos compactos em Rn .
4. Qual é a ligação entre conjuntos limitados e conjuntos compactos em Rn .
Geometria Diferencial - Superfı́cies em R3 - Ulysses Sodré - Matemática - UEL - 2007
Seção 2 Funções vetoriais de várias variáveis reais
2
2.1
7
Funções vetoriais de várias variáveis reais
Aplicação vetorial
Definição 2.1. (Aplicação vetorial) Seja V ⊂ Rm . Uma aplicação f : V → Rn é uma
aplicação vetorial com variáveis reais se, a cada v ∈ V associa um vetor f (v) ∈ Rn . Aqui,
Dom( f ) = V é um conjunto de vetores e Im( f ) também é um conjunto de vetores.
Exemplo 2.1. (Aplicações vetoriais)
1. f : R2 → R3 , f (x, y) = (x, y, x2 + y2 )
2. g : R3 → R2 , g(x, y, z) = (x, y)
2.2
Aplicação linear
Definição 2.2. (Aplicação linear) Uma aplicação f : Rm → Rn é linear se, para quaisquer
u, v ∈ Rm e quaisquer escalares a, b ∈ R, se tem que f (a.u + b.v) = a. f (u) + b. f (v).
Exemplo 2.2. (Aplicações lineares)
1. f : R2 → R3 , f (x, y) = (x, y, x + y)
2. f : R3 → R2 , f (x, y, z) = (y, x)
3. f : R3 → R3 , f (x, y, z) = (x, 0, 0)
4. f : R3 → R2 , f (x, y, z) = (0, 0)
A matriz da aplicação linear f nas bases canônicas de Rm e Rn é denotada por M = [ f ] e
o posto de uma matriz M é o número de linhas linearmente independentes de M.
2.3
Aplicação linear e posto de uma aplicação
Teorema 2.3. (Linearidade e posto) Se f : R3 → R3 é uma aplicação linear e M = [ f ], então
1. f é bijetora se, e somente se, posto(M) = 3.
2. f aplica R3 sobre um plano de R3 se, e somente se, posto(M) = 2.
3. f aplica R3 sobre uma curva de R3 se, e somente se, posto(M) = 1.
Exercı́cio: Determinar o posto da aplicação linear f (x, y, z) = (3x + 2y, 4x − 5y, 6x − 8y).
Teorema 2.4. Se f : R2 → R3 é uma aplicação linear e M = [ f ], então
1. f aplica R2 injetivamente sobre um plano de R3 se, e somente se, posto(M) = 2.
2. f aplica R2 sobre uma curva de R3 se, e somente se, posto(M) = 1.
Exercı́cio: Seja T : R3 → R3 definida por T(x, y, z) = (2x + y − 2z, x + y − z, −x + z). Mostrar
que a aplicação T é linear e que posto(T) = 2, pois T aplica R3 sobre o plano x − y + z = 0.
Geometria Diferencial - Superfı́cies em R3 - Ulysses Sodré - Matemática - UEL - 2007
2.4
2.4
Aplicações contı́nuas
8
Aplicações contı́nuas
Definição 2.3. (Aplicação contı́nua em um ponto) Seja S ⊂ Rm . A aplicação f : S → Rn
é contı́nua em um ponto p ∈ S se, para cada bola aberta Bε ( f (p)) na imagem f (S) existe
uma bola aberta Br (p) ⊂ S tal que
f (Br (p)) ⊂ f (Bε ( f (p))
Definição 2.4. (Aplicação contı́nua em um ponto) A aplicação f : S ⊂ Rm → Rn é
contı́nua em p ∈ S se, dado ε > 0 existe r > 0 tal que se x ∈ Br (p) então f (x) ∈ Bε ( f (p)).
Teorema 2.5. (Continuidade componente a componente) A aplicação f = ( f1 , f2 , f3 , ..., fm ) é
contı́nua em x = p se, e somente se, cada componente fi é contı́nua em x = p, para todo
i = 1, 2, 3, ..., m.
Definição 2.5. (Continuidade sobre um conjunto) Uma aplicação f : S ⊂ Rm → Rn é
contı́nua sobre o conjunto S se f é contı́nua em todos os pontos do conjunto S.
Definição 2.6. (Aplicação contı́nua por conjuntos abertos) Uma aplicação f : S → T com
S ⊂ Rm e T ⊂ Rn é contı́nua sobre o conjunto S, se para cada conjunto W aberto em T,
f −1 (W) é um conjunto aberto em S.
Proposição 2.6. (Propriedades das aplicações vetoriais contı́nuas) Se f e g são aplicações vetoriais contı́nuas em x = p e α é uma função escalar contı́nua em x = p, então também são
contı́nuas no ponto x = p as aplicações:
1. Valor absoluto | f |
2. Adição f + g
3. Subtração f − g
4. Produto de funções α. f
5. Produto escalar f · g
6. Produto vetorial f × g
Teorema 2.7. (Continuidade e conexão) Se uma aplicação f : S → T com S ⊂ Rm e T ⊂ Rn é
contı́nua sobre o conjunto S e A é um conjunto conexo em S, então f (A) também é um conjunto
conexo em T.
Teorema 2.8. (Continuidade e compacidade) Se uma aplicação f : S → T com S ⊂ Rm e T ⊂ Rn
é contı́nua sobre o conjunto S e K é um conjunto compacto em S, então f (K) também é um
conjunto compacto em T.
Teorema 2.9. (Valores extremos) Se uma aplicação f : S → R com S ⊂ Rm é contı́nua sobre o
conjunto S e K é um conjunto compacto em S, então a função f assume os seus valores extremos
(valor máximo e valor mı́nimo) sobre o conjunto K.
Teorema 2.10. (Composta de funções contı́nuas) Sejam A, B, C ⊂ R3 . Se f : A → B é contı́nua
e g : B → C é contı́nua, então g ◦ f : A → C é contı́nua.
2.5
Homeomorfismo
Teorema 2.11. (Homeomorfismo) Uma aplicação f : S → T é homeomorfismo entre os conjuntos
S e T se, f é uma aplicação contı́nua cuja inversa f −1 : T → S também é uma aplicação contı́nua.
Quando existe um homeomorfismo f : S → T, diz-se que S e T são homeomorfos.
Geometria Diferencial - Superfı́cies em R3 - Ulysses Sodré - Matemática - UEL - 2007
2.6
Derivadas direcionais
9
Exemplo 2.12. (Homeomorfismos) Demonstrar que:
1. o intervalo (a, b) é homeomorfo ao intervalo (0, 1).
2. o intervalo (0, 1) é homeomorfo ao intervalo (−1, 1).
3. o intervalo (−1, 1) é homeomorfo ao intervalo (−π, π).
4. o intervalo (−π, π) é homeomorfo à reta real R.
5. o conjunto S1 = {(x, y) ∈ R2 ; x2 + y2 = 1} − {(0, 1)} é homeomorfo a R.
6. o conjunto S2 = {(x, y, z) ∈ R3 ; x2 + y2 + z2 = 1} − {(0, 0, 1)} é homeomorfo a R2 .
Proposição 2.13. (Homeomorfismos) Sejam R, S, T ⊂ R3 .
1. Se f é um homeomorfismo entre R e S, então f −1 é um homeomorfismo entre S e R.
2. Se f é um homeomorfismo entre R e S e g é um homeomorfismo entre S e T então g ◦ f é
um homeomorfismo entre R e T.
2.6
Derivadas direcionais
Definição 2.7. (Derivada direcional) Seja f : V → Rn , V um conjunto aberto de Rm , p ∈ V
e v um vetor não nulo de Rm . A derivada direcional de f no ponto p na direção do vetor
v é o vetor denotado por Dv f (p), obtido pelo limite
Dv f (p) = lim
t→0
f (p + tv) − f (p)
t
quando este limite existe.
0
Quando definimos F(t) = f (x0 + tv0 ), segue que F (0) = Dv f (p).
Exercı́cio: Construir um gráfico indicando a derivada direcional de f em um ponto.
Exemplo 2.14. (Derivada direcional) Para f (x, y) = (x, y, x + y), p = (2, 4) e v = (6, 2):
f ((2, 4) + t(6, 2)) − f (2, 4)
f ((2 + 6t, 4 + 2t) − f (2, 4)
= lim
t→0
t→0
t
t
(2 + 6t, 4 + 2t, 6 + 8t) − (2, 4, 6)
= lim
= (6, 2, 8)
t→0
t
D(6,2) f (2, 4) = lim
Observação 2.1. Se ek = (0, ..., 1, ..., 0) é um vetor com 1 na componente k e 0 nas outras
componentes e f = ( f1 , f2 , ..., fm ), então a derivada direcional de f na direção do vetor ek ,
é igual à derivada parcial de f com relação a xk (k-ésima variável), isto é,
Dek f (x) = (
∂ f1 ∂ f2
∂ fm
,
,··· ,
)
∂xk ∂xk
∂xk
Exemplo 2.15. Se f (x, y) = (x, y, x + y), p = (a, b) e v = (1, 0):
f ((a, b) + t(1, 0)) − f (a, b)
f ((a + t, b) − f (a, b)
= lim
t→0
t→0
t
t
∂f
(a + t, b, a + b + t) − (a, b, a + b)
(t, 0, t)
= lim
= lim
= (1, 0, 1) =
(a, b)
t→0
t→0
t
t
∂x
D(1,0) f (a, b) = lim
Geometria Diferencial - Superfı́cies em R3 - Ulysses Sodré - Matemática - UEL - 2007
2.7
2.7
Aplicação diferenciável
10
Aplicação diferenciável
Definição 2.8. (Aplicação diferenciável) Seja V um conjunto aberto de Rm . A aplicação
f : V → Rn é diferenciável em p ∈ V, se existe uma aplicação linear Lp : Rm → Rn que
associa a cada v ∈ Rm um vetor Lp (v) ∈ Rn tal que
f (p + v) = f (p) + Lp (v) + R(p, v)
R(p, v)
= 0. Considerando que Lp é uma aplicação linear, este limite pode ser
|v|→0
|v|
R(p, tv)
reescrito na forma lim
= 0 e segue que Dv f (p) = Lp (v).
t→0
t
Teorema 2.16. (Diferenciabilidade garante existência de derivadas direcionais) Se a aplicação f
é diferenciável em x = p, então f possui derivadas direcionais no ponto p em todas as direções.
se lim
Exercı́cio: Construir uma aplicação vetorial que possui derivadas direcionais em todas
as direções em um ponto, mas que não é uma aplicação diferenciável neste ponto.
Teorema 2.17. (Diferenciabilidade implica continuidade) Se f é uma aplicação vetorial diferenciável em p, então f é contı́nua em p.
Definição 2.9. (Diferencial de uma aplicação) A aplicação linear Lp é denominada a
diferencial de f em p, denotada por uma das formas d f (p) = f 0 (p) = D f (p) = Lp .
2.8
Matriz jacobiana
Definição 2.10. (Matriz jacobiana) Seja f = ( f1 , f2 , ..., fm ) definida e diferenciável em
x = (x1 , x2 , ..., xn ). Definimos matriz jacobiana de f no ponto x, por
∂f
1 · · · ∂ f1 · · · ∂ f1
∂x1
∂x j
∂xn
..
..
..
..
..
.
.
.
.
.
∂
f
∂
f
∂
fi
∂( f1 , f2 , ..., fm ) i
i
···
···
=
J( f ) =
∂x j
∂xn
∂(x1 , x2 , ..., xn ) ∂x1
.
..
..
..
..
..
.
.
.
.
∂ f
∂ fm
∂ fm
m
···
···
∂x1
∂x j
∂xn
Exemplo 2.18. A matriz jacobiana da aplicação f (u, v, w) = (u + 2v + 3w, 4u − 5v − 6w) é
!
1 2
3
J( f ) =
4 −5 −6
Proposição 2.19. (Propriedades das aplicações vetoriais diferenciáveis) Se f e g são aplicações
diferenciáveis em p e α é uma função escalar diferenciável em p, então são diferenciáveis no ponto
p as aplicações:
Geometria Diferencial - Superfı́cies em R3 - Ulysses Sodré - Matemática - UEL - 2007
2.9
Regra da cadeia
1. Valor absoluto | f |
2. Adição f + g
11
3. Subtração f − g
4. Produto de funções α. f
5. Produto escalar f · g
6. Produto vetorial f × g
Teorema 2.20. (Diferenciabilidade versus derivadas parciais) Uma aplicação vetorial f é continuamente diferenciável em x = p se, e só se, as suas derivadas parciais são continuas em
x = p.
2.9
Regra da cadeia
Teorema 2.21. (Derivada da composta) Sejam A, B, C ⊂ R3 . Se f : A → B é uma aplicação
vetorial diferenciável em p e g : B → C é uma aplicação vetorial diferenciável em f (p), então a
aplicação composta g ◦ f : A → C é uma aplicação vetorial diferenciável em x = p e além disso
D(g ◦ f )(p) = D(g( f (p)) · D( f (p))
Exemplo 2.22. (Regra da cadeia) Para f (x, y) = (x + y, x − y, x2 + y2 ), x = 1 + t2 e y = sin(t):
df
d f dx d f dy
=
+
= 2t(1, 1, 2(1 + t2 )) + cos(t)(1, −1, 2 sin(t))
dt
dx dt dy dt
= (2t + cos(t), 2t − cos(t), 4t + 4t3 + sin(2t))
2.10
Teorema da função inversa
Teorema 2.23. (Teorema da função inversa) Se f : V ⊂ R3 → R3 e J( f )(p) , 0, então existe
uma vizinhança aberta S(p) ⊂ V tal que
1. f restrita à vizinhança aberta S(p) é injetiva;
2. f (S(p)) é um conjunto aberto, e,
3. a função inversa f −1 é diferenciável em f (S(p)).
Exercı́cio: Exibir um exemplo de uma função f = f (x, y, z) para a qual possamos aplicar
o Teorema da função inversa.
Teorema 2.24. Uma aplicação linear f : R2 → R3 é bijetiva sobre um plano de R3 se, e somente
se, posto([ f ]) = 2.
Teorema 2.25. (Teorema da função implı́cita) Se f : R2 × R → R é diferenciável tal que
f (x0 , y0 , z0 ) = 0 e fz (x0 , y0 , z0 ) , 0), então existe z = z(x, y) definida sobre um conjunto
S(x0 , y0 , z0 ) tal que f (x, y, z(x, y)) = 0 para todo par (x, y) ∈ Sπ (x0 , y0 ) e além disso
zx = −
fx
,
fz
zy = −
fy
fz
Exercı́cio: Exibir um exemplo de uma função f = f (x, y, z) para a qual possamos aplicar
o Teorema da função implı́cita.
Geometria Diferencial - Superfı́cies em R3 - Ulysses Sodré - Matemática - UEL - 2007
Seção 3 Superfı́cies no espaço tridimensional
3
12
Superfı́cies no espaço tridimensional
3.1
Superfı́cies em R3
Uma superfı́cie(1 ) é um objeto geométrico bi-dimensional estendido no espaço com
algumas condições de suavidade. Existem vários modos de usar a Matemática para
expressar quantitativamente este fato sobre superfı́cies bi-dimensionais em R3 .
No espaço euclidiano tri-dimensional R3 , a escolha de um ponto arbitrário implica a
existência de três graus de liberdade, pois um ponto é determinado por três coordenadas.
Para reduzir a extensão dessa liberdade, nós podemos relacionar as três coordenadas de
um ponto arbitrário por uma equação:
F(x, y, z) = 0
(3.1)
Assim, a escolha de duas coordenadas determina a terceira coordenada de um ponto.
Isto significa que nós podemos definir uma superfı́cie por meio de uma equação em
algum sistema de coordenadas (que pode ser um sistema de coordenadas caretsianas).
Já usamos este método de definir superfı́cies quando estudamos uma curva como a
interseção de duas superfı́cies definidas por f (x, y, z) = 0 e g(x, y, z) = 0.
Outro modo de definir uma superfı́cie é o método paramétrico. Da mesma maneira que no
estudo de curvas, as superfı́cies podem ser parametrizadas por dois parâmetros, aqui
denotados por u e v, através de uma aplicação:
f (u, v) = (x(u, v), y(u, v), z(u, v)) = x(u, v) i + y(u, v) j + z(u, v) k
(3.2)
que é a expressão do raio-vetor de cada ponto de uma superfı́cie em um sistema de
coordenadas cartesianas em função dos parâmetros u e v.
Em geral, só uma parte de uma superfı́cie é representada na forma paramétrica, assim,
considerando o par ordenado (u, v) ∈ R2 , nós podemos assumir que o ponto (u, v) se
desloca sobre algum domı́nio(2 ) U ⊂ R2 . Vamos denotar por W = f (U) a imagem de U
pela aplicação 3.2. Assim, W é denominado o domı́nio mapeado(3 ), U é o mapa ou a carta
e a função 3.2 é a carta que mapeia U sobre D.
A classe de suavidade (isto é, a classe de diferenciabilidade) da superfı́cie D é determinada pela classe de suavidade da função f (u, v) = (x(u, v), y(u, v), z(u, v), que equivale à
classe de suavidade das funções componentes x = x(u, v), y = y(u, v) e z = z(u, v).
Na seqüência, nós consideraremos somente as superfı́cies para as quais estas funções
são pelo menos continuamente diferenciáveis.
Diferenciando as componentes de f = f (u, v), nós podemos tomar as suas derivadas na
1
Parte deste material foi adaptada do trabalho do Sharipov, que está disponı́vel na Internet.
Um domı́nio é um conjunto aberto e conexo
3
Também conhecido como imagem ou traço da superfı́cie
2
Geometria Diferencial - Superfı́cies em R3 - Ulysses Sodré - Matemática - UEL - 2007
3.2
Parametrização regular para um conjunto S de R3
13
matriz de Jacobi (matriz jacobiana):
∂(x, y, z) xu xv
Jf =
= yu yv
∂(u, v)
zu zv
3.2
(3.3)
Parametrização regular para um conjunto S de R3
Definição 3.1. Uma parametrização regular para um conjunto S ⊂ R3 é uma aplicação:
(S1) f : U → S continuamente diferenciável, onde U é um aberto de R2 ,
(S2) f é um homeomorfismo,
(S3) a matriz jacobiana tem posto igual a 2.
Quando um conjunto S de R3 possui uma parametrização regular, este conjunto S recebe
o nome de superfı́cie regular.
Intuitivamente, uma superfı́cie S é um conjunto de pontos de R3 , sendo que cada ponto
de S pode ser confundido com um plano tangente a S traçado neste ponto.
Observação 3.1. Afirmar que uma superfı́cie S possui uma parametrização regular tem o
mesmo significado que exibir:
1. Um domı́nio U ⊂ R2 ,
2. Uma aplicação bijetiva f : U → S,
3. A inversa f −1 : S → U dada por três aplicações continuamente diferenciáveis
regulares em todos os pontos do domı́nio S.
Exemplo 3.1. (Parametrizações e superfı́cies)
1 2
(x + y2 )}, pode ser parametrizado pela
2
aplicação f : R2 → R3 de classe C∞ definida por f (u, v) = (u + v, u − v, u2 + v2 ).
A esfera S = {(x, y, z) ∈ R3 : x2 + y2 + z2 = 1}, pode ser parametrizada pela aplicação
f : R2 → R3 definida por f (u, v) = (cos(u) sin(v), sin(u) sin(v), cos(v)).
Um cilindro é uma superfı́cie gerada por uma reta r (gerada pelo vetor unitário w)
que se move paralelamente sobre uma curva C : g = g(u). Uma parametrização
para o cilindro é f : R2 → R3 definida por f (u, v) = g(u) + v w.
O hemisfério norte de uma esfera de raio unitário
√ pode ser parametrizado pela
aplicação f : R2 → R3 definida por f (u, v) = (u, v, 1 − u2 − v2 ).
O hemisfério norte de uma esfera de raio unitário pode ser parametrizado pela
aplicação f : R2 → R3 definida por f (u, v) = (cos(u) sin(v), sin(u) sin(v), cos(v)).
O hemisfério norte de um elipsóide possui uma parametrização regular definida
por f : R2 → R3 definida por f (u, v) = (a cos(u) sin(v), b sin(u) sin(v), c cos(v)).
1. O parabolóide S = {(x, y, z) ∈ R3 : z =
2.
3.
4.
5.
6.
Geometria Diferencial - Superfı́cies em R3 - Ulysses Sodré - Matemática - UEL - 2007
3.2
Parametrização regular para um conjunto S de R3
Quando uma aplicação parametrizada é regular, a matriz jacobiana J f =
três determinantes menores de ordem 2, que são:
xu xv yu yv yu yv zu zv zu zv xu xv 14
∂(x, y, z)
possui
∂(u, v)
(3.4)
sendo que pelo menos um deles é não nulo.
Renomeando as variáveis x, y e z, sempre podemos fazer com que o primeiro determinante seja não nulo, isto é:
xu xv (3.5)
yu yv , 0.
Aqui, tomamos as duas componentes da parametrização f (u, v) = (x(u, v), y(u, v), z(u, v))
como aplicações e escrevemos as mesmas como segue:
x = x(u, v)
y = y(u, v)
(3.6)
(3.7)
Em função de 3.5, as aplicações acima possuem inversas locais. Restringindo estas
duas aplicações a alguma vizinhança próxima de um ponto escolhido arbitrariamente,
podemos construir duas funções continuamente diferenciáveis
u = u(x, y)
v = v(x, y)
(3.8)
(3.9)
que são as inversas das aplicações 3.6 e 3.7, fato conhecido como uma versão do Teorema
da Função Implı́cita.
Substituindo u = u(x, y) e v = v(x, y) nos argumentos da função z = z(u, v) na aplicação
f (u, v) = (x(u, v), y(u, v), z(u, v)), obtemos a função f (x, y) = z(u(x, y), v(x, y)) tal que, cada
parte regular de uma superfı́cie pode ser localmente (isto é, em alguma vizinhança
do ponto sob referência) representada como o gráfico de uma função continuamente
diferenciável de duas variáveis z = f (x, y).
Definição 3.1. (Superfı́cies simples) Uma superfı́cie simples é aquela que não possui
autointerseções.
Observação sobre singularidade: A condição de regularidade, que posto(Jp ) = 2, pode
gerar a existência de pontos singulares sobre uma superfı́cie. Como exemplo:
S1 :
S2 :
f (u, v) = (u3 , v3 , u2 + v2 )
g(u, v) = (u3 , v3 , u4 + v4 )
(3.10)
(3.11)
são superfı́cies definidas por funções suaves, mas observamos que:
1. Nos dois casos, a condição de regularidade falha em (u, v) = (0, 0).
2. A superfı́cie S1 possui uma singularidade na origem.
3. A superfı́cie S2 não possui singularidade na origem.
Geometria Diferencial - Superfı́cies em R3 - Ulysses Sodré - Matemática - UEL - 2007
3.3
3.3
Curvas coordenadas
15
Curvas coordenadas
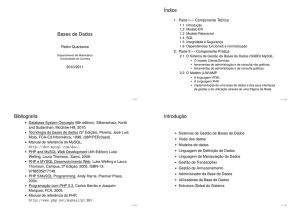
Usando uma parametrização regular de S definida por f : U → S, podemos estudar
coordenadas curvilı́neas sobre a superfı́cie e vetores tangentes à superfı́cie.
Figura 101 (Sharipov)
Figura 102 (Sharipov)
As condições u = constante e v = constante determinam duas famı́lias de linhas coordenadas sobre o plano de parâmetros u e v, formando uma malha coordenada em U. A
aplicação f (u, v) = (x(u, v), y(u, v), z(u, v)) aplica esta malha (Figura 101) sobre uma outra
malha coordenada que está sobre a superfı́cie S (Figura 102).
Definição 3.2. (Plano tangente e reta normal) Se f : R2 → R3 é uma parametrização
regular de classe C1 para uma superfı́cie simples S e as funções reais u = u(t) e v = v(t)
parametrizações de uma curva regular g = g(t) apoiada no plano R2 , então
1. f (t) = f (u(t), v(t)) define uma curva apoiada sobre a superfı́cie S.
2. f 0 (t) define o vetor tangente à curva em f (t) desde que f 0 (t) , 0.
3.4
Vetores tangentes a uma superfı́cie S
Consideremos os vetores fu e fv tangentes às curvas da malha coordenada, em cada
ponto da superfı́cie S.
Se a aplicação vetorial f (u, v) = (x(u, v), y(u, v), z(u, v)) que define a parametrização está
expandida na base canônica do sistema de coordenadas cartesianas, podemos exibir os
vetores tangentes à superfı́cie S: fu e fv através dos vetores da base {i, j, k}:
∂
[x(u, v) i + y(u, v) j + z(u, v) k]
∂u
∂
fv (u, v) =
[x(u, v) i + y(u, v) j + z(u, v) k]
∂v
fu (u, v) =
(3.12)
(3.13)
Teorema 1. Os vetores tangentes fu e fv são linearmente independentes em cada ponto de uma
superfı́cie. Portanto, eles geram um plano que é um campo de vetores tangentes em S.
Geometria Diferencial - Superfı́cies em R3 - Ulysses Sodré - Matemática - UEL - 2007
3.5
Vetor Normal e Plano tangente a uma superfı́cie S
16
Demonstração. Vamos considerar os vetores-colunas compostos pelas coordenadas cartesianas dos vetores tangentes fu e fv :
xu
fu = yu
zu
xv
fv = yv
zv
(3.14)
Os vetores-colunas acima coincidem com as colunas da matriz jacobiana 3.3. Usando a
condição de regularidade (posto(J f ) = 2), segue que as colunas da matriz jacobiana J f
são linearmente independentes, o que demonstra o teorema.
3.5
Vetor Normal e Plano tangente a uma superfı́cie S
Os vetores fu e fv calculados em algum ponto de uma superfı́cie S geram o plano tangente
à superfı́cie S neste ponto e todo vetor tangente a S neste ponto pertence a este plano
tangente e pode ser ser escrito como combinação linear dos vetores fu e fv .
Consideremos uma curva parametrizada g = g(t) inteiramente contida na superfı́cie
(ver Figura 101 e Figura 102), definida por duas funções de um parâmetro t:
u = u(t),
v = v(t)
(3.15)
Substituindo u = u(t) e v = v(t) em f (u, v) = (x(u, v), y(u, v), z(u, v)), obtemos o raiovetor de um ponto da curva na base canônica do sistema de coordenadas cartesianas
f (t) = f (u(t), v(t)).
Derivando f = f (t) com respeito à variável t, obtemos o vetor velocidade da partı́cula
f 0 (t) que é tangente à curva f = f (t) em função das duas funções 3.15 acima:
f 0 (t) =
df
du
dv
= fu
+ fv
= u0 (t) fu + v0 (t) fv
dt
dt
dt
(3.16)
Esta relação garante que o vetor tangente f 0 (t) é uma combinação linear dos vetores fu
e fv que geram o plano tangente.
Se uma curva g = g(t) está apoiada na superfı́cie, o vetor tangente g0 (t) está apoiado no
plano tangente a esta superfı́cie e as derivadas u0 (t) e v0 (t), são as componentes do vetor
f 0 (t) gerado pelos vetores tangentes fu e fv .
Definição 3.3. (Vetor normal, plano tangente e reta normal) Seja f : R2 → R3 uma
parametrização regular continuamente diferenciável para uma superfı́cie simples S e
uma parametrização para uma curva regular g = (u(t), v(t) apoiada sobre o plano R2 .
Definimos:
1. um vetor normal a S no ponto p, através de N(p) = fu × fv .
2. a reta normal a S no ponto p, por r(t) = p + t N(p), (t ∈ R).
3. o plano tangente a S no ponto p, por g(u, v) = p + a fu + b fv , ( b ∈ R).
Geometria Diferencial - Superfı́cies em R3 - Ulysses Sodré - Matemática - UEL - 2007
3.6
3.6
Parametrização de uma superfı́cie pelo gráfico
17
Parametrização de uma superfı́cie pelo gráfico
Proposição 3.2. (Parametrização pelo gráfico) Se f : U → R é uma aplicação diferenciável
definida sobre um conjunto aberto U ⊂ R2 , então o gráfico de f , é uma aplicação diferenciável
g : U → R3 definida por g(x, y) = (x, y, f (x, y)) representando uma superfı́cie regular em R3 .
3.7
Ponto crı́tico, valor crı́tico e valor regular
Definição 3.4. (Ponto crı́tico, valor crı́tico e valor regular.) Seja f : U ⊂ R2 → R3 uma
aplicação diferenciável.
1. Diz-se que p ∈ U é um ponto crı́tico de f se a matriz jacobiana é identicamente
nula em p, isto é, (J f )(p) ≡ θ. (Neste caso (J f )p não é sobrejetiva.)
2. O ponto f (p) é denominado valor crı́tico de f .
3. Se f (p) não é valor crı́tico, então f (p) é um valor regular.
A partir das definições acima, a ∈ f (U) é um valor regular de f se, e somente se,
grad( f ) = ( fx , f y , fz ) , θ em qualquer ponto da imagem inversa e
f −1 (a) = {(x, y, z) ∈ U : f (x, y, z) = a}
3.8
Superfı́cie regular como imagem inversa de um valor regular
Proposição 3.3. (Superfı́cie como imagem inversa de um valor regular) Se f : U ⊂ R3 → R é
uma aplicação diferenciável definida sobre um conjunto aberto U de R3 e a ∈ f (U) é um valor
regular de f , então f −1 (a) é uma superfı́cie regular em R3 .
Demonstração. Seja p = (x0 , y0 , z0 ) ∈ f −1 (a) onde a é um valor regular em f (U). Assim, é
possı́vel assumir que fz (p) , 0. Definindo F : U ⊂ R3 → R3 por
F(x, y, z) = (x, y, f (x, y, z))
e tomando F(p) = F(x0 , y0 , z0 ) = (u, v, w), segue que
1 0 fx
Fp = 0 1 f y (p) = fz (p) , 0
0 0 fx
e pelo Teorema da função inversa, segue a existência de uma vizinhança V = Vp e de uma
vizinhança W = W f (p) tal que F : V → W é uma aplicação inversı́vel e assim F−1 : W → V
é uma aplicação diferenciável.
Para (u, v, w) ∈ W) segue que F−1 (u, v, w) = (u, v, g(u, v, w)) e temos em particular que
z = g(u, v, a) = h(x, y)
Geometria Diferencial - Superfı́cies em R3 - Ulysses Sodré - Matemática - UEL - 2007
3.8
Superfı́cie regular como imagem inversa de um valor regular
18
é diferenciável definida sobre a projeção de V sobre o plano z = 0 e como
F( f −1 {a} ∩ V) = W ∩ {(u, v, w) : w = a}
então o gráfico de h é f −1 (a) ∩ V e pela proposição anterior f −1 (a) ∩ V é uma vizinhança
coordenada de p e p ∈ f −1 (a) pode ser coberta por uma vizinhança coordenada e podemos
garantir que f −1 (a) é uma superfı́cie regular.
Exemplo 3.4. (Superfı́cie regular) Mostraremos que é regular a superfı́cie elipsoidal
definida por
x2 y2 z2
S: 2 + 2 + 2 =1
a
b
c
Seja S = {(x, y, z) ∈ R3 : f (x, y, z) = 0}, onde f : R3 → R é definida por
f (x, y, z) =
x2 y2 z2
+
+ −1
a2 b2 c2
Se mostrarmos que 0 é um valor regular para f : R3 → R teremos mostrado que S = f −1 (0)
é uma superfı́cie regular.
Realmente,
2y
2x
2z
,
f
=
,
f
=
y
z
a2
b2
c2
e como fx (0, 0, 0) = f y (0, 0, 0) = fz (0, 0, 0) = 0 e (0, 0, 0) < f −1 (0) segue que 0 é um valor
regular para f .
fx =
Exercı́cio: Exibir parametrizações para o Helicóide e para o Toro.
Exercı́cios: Mostrar que cada uma das superfı́cies abaixo é regular.
1. (Hiperbolóide de 2 folhas) S : x2 + y2 − z2 + 1.
2. (Parabolóide) S : z = x2 + y2
3. (Cilindro) S : x2 + y2 = a2 , z ∈ R
4. (Plano) S : ax + by + cz + d = 0
5. (Parabolóide hiperbólico) S : z = axy
Proposição 3.5. Se S ⊂ R3 é uma superfı́cie regular e p ∈ S, então, existe uma vizinhança Vp
em S tal que Vp é o gráfico de uma aplicação diferenciável de uma das três formas seguintes:
z = f (x, y),
y = g(x, z),
x = h(x, z)
Demonstração. Seja F : U ⊂ R2 → S ⊂ R3 uma parametrização de S em p e tomemos
F(u, v) = (x(u, v), y(u, v), z(u, v)),
(u, v) ∈ U
Como (JF)(p) = 2, pelo menos um dos determinantes jacobianos:
∂(x, y)
,
∂(u, v)
∂(x, z)
,
∂(u, v)
∂(y, z)
∂(u, v)
Geometria Diferencial - Superfı́cies em R3 - Ulysses Sodré - Matemática - UEL - 2007
3.8
Superfı́cie regular como imagem inversa de um valor regular
19
deve ser diferente de zero no ponto q = F−1 (p)
∂(x, y)
(q) , 0 e a composta π ◦ F : U ⊂ R2 → R2 onde a projeção é definida por
∂(u, v)
∂(x, y)
(q) , 0.
π(x, y, z) = (x, y) Assim (π ◦ F)(u, v) = (x(u, v), y(u, v)) e além disso
∂(u, v)
Aplicando o Teorema da função inversa, podemos garantir que existem vizinhanças V1
de q e V2 de (π ◦ F)(q) tal que V1 e V2 são difeomeorfos pela aplicação π ◦ F, assim, pelo
Teorema da função inversa
(π ◦ F)−1 (V2 ) = V1
Se
e como F é um homeomorfismo, segue que
(π ◦ F)−1 (x, y) = (u(x, y), v(x, y))
garantindo que
F(u, v) = (x(u, v), y(u, v), z(u, v))
Desse modo
F(x, y) = (x(u(x, y), v(x, y)), y(u(x, y), v(x, y)), z(u(x, y), v(x, y)))
o que significa que
F(x, y) = (x, y, z(x, y))
é a parametrização pelo gráfico da superfı́cie z = z(x, y).
Exemplo 3.6. Seja a superfı́cie S parametrizada por x = u + v, y = u − v e z = u2 + v2
sendo (u, v) ∈ R2 .
Como
∂(x, y) 1 1 ,0
=
∂(u, v) 1 −1
então existe z = z(x, y) cujo gráfico representa a superfı́cie S.
Como
!
!
∂(x, y) dx
du
=
dv
∂(u, v) dy
então podemos escrever z = 21 (x2 + y2 ) que representa a superfı́cie S.
Exercı́cio: Usando a Proposição (3.5), mostrar que o cone de uma folha, definido para
(x, y) ∈ R2 por
q
z = x2 + y2
não é uma superfı́cie regular.
Exercı́cio: Qual é o domı́nio de definição do cone como superfı́cie regular?
Exercı́cio: Mostrar que o cone de duas folhas z2 = x2 + y2 não é uma Superfı́cie Regular.
Geometria Diferencial - Superfı́cies em R3 - Ulysses Sodré - Matemática - UEL - 2007
3.9
Exercı́cios
20
Proposição 3.7. Seja p ∈ S e F : U ⊂ R2 → R3 sendo p ∈ F(U), satisfazendo as condições S1 e
S2 da definição (3.1). Se F for injetiva, então F−1 é contı́nua.
Demonstração. Seja F(u, v) = (x(u, v), y(u, v), z(u, v)), com (u, v) ∈ U e q = F−1 (p) ∈ U.
∂(x, y)
Suponhamos que
(q) , 0 e que π : R3 → R2 é definida por π(x, y, z) = (x, y).
∂(u, v)
Pelo Teorema da função inversa, existem V = V(q) e W = W((π ◦ F)(q)) tal que π ◦ F :
V → W é um difeomeorfismo sobre W.
Como F é injetiva, então
F−1 |F(V) = (π ◦ F)−1 ◦ π|F(V)
e como (π ◦ F)−1 e π são contı́nuas, segue que F−1 é contı́nua sobre F(U), isto é, F−1 é
contı́nua sobre o conjunto F(U).
Exercı́cio: Seja P = {(x, y, z) ∈ R3 : x = y} um plano e F : U ⊂ R2 → R3 definida por
F(u, v) = (u + v, u + v, uv)
onde U = {(u, v) ∈ R2 : u > v}.
Observamos que F(U) ⊂ P, mas temos a pergunta: F é uma parametrização para o plano
P? A resposta é NÂO, pois F não é injetiva e pela Proposição (3.7) segue que F−1 não é
contı́nua, assim F são satisfaz à condição S2, isto é, F não é um homeomorfismo.
3.9
Exercı́cios
1. Mostrar que o cilindro C = {(x, y, z) ∈ R3 : x2 + y2 = 1} é uma Superfı́cie Regular e
encontrar parametrizações cujas vizinhanças coordenadas cobrem este cilindro.
2. O conjunto {(x, y, z) ∈ R3 : z = 0 e x2 + y2 ≤ 1} é uma Superfı́cie Regular?
3. O conjunto {(x, y, z) ∈ R3 : z = 0 e x2 + y2 < 1} é uma superfı́cie regular?
4. Exibir outra demonstração da Proposição (1) para h(x, y, z) = f (x, y) − z.
5. Seja f (x, y, z) = z2 . Provar que 0 não é um valor regular de f mas f −1 (0) é uma
superfı́cie regular.
6. Seja f (x, y, z) = (x + y + z − 1)2 .
(a) Localizar os pontos crı́ticos e os valores crı́ticos de f .
(b) Para quais valores de c, o conjunto {(x, y, z) ∈ R3 : f (x, y, z) = c} é uma
Superfı́cie Regular.
7. Realizar uma análise semelhante à do ı́tem anterior para f (x, y, z) = xyz2 .
8. Seja F = F(u, v) com está na definição de Superfı́cie Regular. Verificar que JFq :
R2 → R3 é injetiva se, e somente se, (Fu × Fv )(q) , 0.
x2 y2 z2
9. Construir uma parametrização f = f (u, v) para o elipsóide S : 2 + 2 + 2 = 1 e
a
b
c
descrever as curvas coordenadas para u = Constante sobre o elipsóide.
Geometria Diferencial - Superfı́cies em R3 - Ulysses Sodré - Matemática - UEL - 2007
3.9
Exercı́cios
21
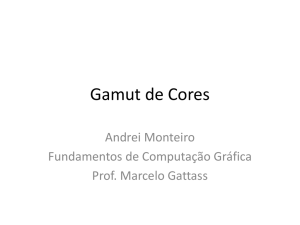
10. Será que é regular a superfı́cie S obtida pela anexação de dois cilindros circulares
retos, representada graficamente por
11. Consideremos a esfera S2 : x2 + y2 + z2 = 1 e a projeção estereográfica definida
por π : S2 − {(0, 0, 1)} → R2 que associa a cada ponto P que está na interseção entre
S2 − {(0, 0, 1)} e o plano z = 0 com a reta que liga o polo norte (0, 0, 1) ao ponto P.
(a) Mostrar que π−1 : R2 → S2 é definida por
π−1 (u, v) =
(2u, 2v, u2 + v2 )
u2 + v2 + 1
(b) Mostrar que é possı́vel cobrir a esfera S2 com a projeção estereográfica, usando
apenas duas parametrizações.
(c) Seja V um conjunto aberto do plano z = 0. Mostrar que o conjunto {(x, y, z) ∈
R3 : (x, y) ∈ V e z = 0} é uma Superfı́cie Regular.
12. Mostrar que S = {(x, y, z) ∈ R3 : z = x2 − y2 } é uma Superfı́cie Regular e analisar as
duas parametrizações abaixo para saber que partes de S são cobertas por F1 e F2 .
(a) F1 (u, v) = (u + v, u − v, 4uv), (u, v) ∈ R2
(b) F2 (u, v) = (u cosh(v), u sinh(v), u2 ), (u, v) ∈ R2
Geometria Diferencial - Superfı́cies em R3 - Ulysses Sodré - Matemática - UEL - 2007
3.10
Superfı́cies regradas
22
13. Construir uma parametrização f = f (u, v) para z2 −x2 − y2 = 1 e descrever as curvas
coordenadas para u = Constante sobre o elipsóide.
14. Mostrar que 4x3 − 2xy + z = 0 representa uma Superfı́cie Regular em R3 .
3.10
Superfı́cies regradas
Definição 3.5. (Superfı́cie regrada) Uma superfı́cie regrada S é uma superfı́cie que em
cada ponto p ∈ S existe um segmento de reta contido em S passando por p.
Observação: Uma forma de obter superfı́cies regradas é tomar uma parametrização da
forma f (u, v) = g(u) + v h(u), onde g e h são curvas diferenciáveis.
Exemplo 3.8. (Superfı́cies regradas)
1. A função f (u, v) = (cos(u), sin(u), 1) + v(0, 0, 1) define uma superfı́cie regrada.
2. O helicóide definido por f (u, v) = g(u) + vh(u) onde g(u) = (a cos(u), a sin(u), u) e
h(u) = (− cos(u), − sin(u), 0), é uma superfı́cie regrada.
Exercı́cio: Mostrar que a função f (u, v) = (u, v, uv) parametriza a superfı́cie z = xy.
3.11
Mudança de parâmetros
Se f : U → S e f : U → S são parametrizações para uma superfı́cie S, então existe uma
aplicação h : ( f )−1 (W) → f −1 (W) tal que f = f ◦ h é um difeomorfismo.
Exercı́cio: Mostrar que f (u, v) = (cos(u), sin(u), v) com 0 < u < 2π e −∞ < v < ∞ e
p
y
x
g(x, y) = ( p
, p
, x2 + y2 ) onde (x, y) ∈ R2 − {(0, 0)}, são parametrizações
x2 + y2
x2 + y2
para o cilindro circular reto x2 + y2 = 1 em R3 . Mostrar que existe um difeomorfismo
h
p
2
2
tal que g = f ◦ h.
Dica: Você deve obter h(x, y) = (arctan(y/x), x + y ).
Exercı́cio: Construir um difeomorfismo entre as superfı́cies S : x2 + y2 + z2 = a2 e
x2 y2 z2
E : 2 + 2 + 2 = 1, sendo a < b < c.
a
b
c
Exercı́cio: Mostrar que o parabolóide z = x2 + y2 é difeomorfo ao plano z = 0.
Geometria Diferencial - Superfı́cies em R3 - Ulysses Sodré - Matemática - UEL - 2007
3.12
3.12
Superfı́cies orientáveis
23
Superfı́cies orientáveis
Uma superfı́cie S é orientável, se existem duas parametrizações f = f (u, v) e g = g(u, v)
e existe um conjunto aberto W tal que se p ∈ W ∩ S e p ∈ f (u, v) ∩ g(u, v), então o
difeomeorfismo h existente entre f −1 (W) e g−1 (W) tem jacobiano positivo em p.
Exercı́cio: Mostrar que o parabolóide de revolução z = x2 + y2 é orientável.
Observação: Toda superfı́cie que pode ser coberta por uma ́ parametrização é uma
superfı́cie orientável.
Exercı́cio: Mostrar que a esfera x2 + y2 + z2 = a2 é orientável.
Exercı́cio: Estudar a Faixa de Möbius com respeito à sua orientabilidade.
3.13
Vetor normal a uma superfı́cie
Definição 3.6 (Vetor normal a uma superfı́cie). Se S é uma superfı́cie e p ∈ S, o vetor
normal unitário à superfı́cie S no ponto p ∈ S é definido por
N(u, v) =
fu × fv
| fu × fv |
onde f = f (u, v) é uma parametrização para S e a reta normal à superfı́cie S passando
pelo ponto p ∈ S é dada para cada t ∈ R, por
r(t) = p + t N
Definição 3.7 (Campo diferenciável). Um campo diferenciável de vetores normais em
U ⊂ S é uma aplicação diferenciável N : U → R3 que associa a cada p ∈ U um vetor
normal Np .
Definição 3.8 (Diferenciabilidade em um ponto da superfı́cie). Seja f : V ⊂ S → R
definida em um aberto V de S.
f é diferenciável em p ∈ V se existe uma parametrização φ : U ⊂ R2 → S ∩ V tal que
f ◦ φ é uma aplicação diferenciável sobre φ−1 (p).
Geometria Diferencial - Superfı́cies em R3 - Ulysses Sodré - Matemática - UEL - 2007
3.14
Superfı́cies de revolução
24
Definição 3.9 (Diferenciabilidade entre superfı́cies). Diz-se que f : S1 → S2 é uma
aplicação diferenciável, se existem duas parametrizações φ : U ⊂ R2 → S1 e ψ : V ⊂
R2 → S2 tal que h = ψ−1 ◦ f ◦ φ : U ⊂ R2 → V ⊂ R2 é diferenciável.
S1
x
φ
f
−−−−→
S2
x
ψ
h
U ⊂ R2 −−−−→ V ⊂ R2
3.14
Superfı́cies de revolução
Seja √
z = f (y) uma curva. Para rodar √esta curva em torno do eixo OZ, basta tomar
y = X2 + Y2 e z = Z para obter Z = f ( X2 + Y2 ).
Exemplo 3.9. (Superfı́cie de revolução) Obtemos a superfı́cie de revolução gerada por
√
1. z = y2 em torno do eixo OZ, tomamos y = X2 + Y2 e z = Z para obter Z = X2 + Y2 .
√
2. x = 1y em torno do eixo OY, tomamos x = X2 + Z2 e y = Y para obter X2 + Z2 = Y12 .
√
2
3. y = e−x , (x > 0) em torno do eixo OY, tomamos x = X2 + Z2 e y = Y para obter
Y = exp(−(X2 + Z2 )).
3.15
Superfı́cie tubular
Seja g : I → R3 uma curva regular com curvatura não nula, que esteja parametrizada
pelo comprimento de arco. Uma superfı́cie tubular pode ser parametrizada por
f (s, v) = g(s) + m (cos(v) N(s) + sin(v) B(s))
onde m é uma constante não nula, N = N(s) é o vetor normal e B = B(s) é o vetor
binormal à curva g = g(s).
Exercı́cio: Mostrar que a parametrização f (s, v) = g(s) + m (cos(v) N(s) + sin(v) B(s))
define uma superfı́cie tubular regular e cujo vetor normal à superfı́cie é definido por
N(s, v) = − cos(v) N(s) + sin(v) B(s)).
Exercı́cio: Seja a superfı́cie parametrizada por f (u, v) = (g(u) cos(v), g(u) sin(v), h(u)).
Mostrar que passam pelo eixo OZ as normais à superfı́cie, onde g = g(u) e h = h(u)
são funções não nulas.
Exercı́cio: Mostrar que z = x2 + y2 é uma superfı́cie fechada em R3 .
Exercı́cio: Se abc , 0, mostrar que cada equação x2 + y2 + z2 = 2ax, x2 + y2 + z2 = 2by e
x2 + y2 + z2 = 2cz define uma superfı́cie regular e que estas três superfı́cies se interceptam
ortogonalmente.
Exercı́cio: Mostrar que não existe uma curva contı́nua contida inteiramente na superfı́cie
z2 = 1 + x2 + y2 ligando os pontos (0, 0, 1) e (0, 0, −1).
Geometria Diferencial - Superfı́cies em R3 - Ulysses Sodré - Matemática - UEL - 2007