Interação em Aplicações para Treinamento Médico Virtual: Problemas e
Soluções a partir de estudos de caso
OMITTED FOR BLIND REVIEW
Abstract
1. Introdução
This paper presents the implementation of an
interaction module incorporated in a Virtual Reality
(VR) framework, which aims at facilitating the
implementation of medical training tools for biopsy
exams simulation. The specific goal is to present
problems and challenges noticed during the
implementation and expose solutions adopted in order
to obtain a higher degree of realism. The module
supports conventional devices (keyboard and mouse)
and non-conventional devices (haptic equipment and
dataglove). The generated applications through
framework were evaluated by students and teachers of
the medical area.
A construção de muitas aplicações de Realidade
Virtual (RV) visa à simulação de situações do mundo
real por meio do computador, permitindo que pessoas
realizem determinadas tarefas utilizando essas
máquinas, como se estivessem no ambiente real.
Entretanto, a construção de tais aplicações não é um
procedimento trivial, visto que inúmeras pesquisas
nessa área estão sendo elaboradas, procurando
aperfeiçoar e desenvolver sistemas de RV que gerem
simulações mais próximas do real, proporcionando
benefícios às pessoas. A RV está presente em diversas
áreas do conhecimento. Na Medicina, pode auxiliar
profissionais da área (médicos e estudantes) em
simulações de cirurgias e demais procedimentos
médicos.
Alguns benefícios na simulação de tais
procedimentos são a disponibilidade do sistema,
minimizando a necessidade de cobaias; a diversidade
de casos, oferecendo diversas situações, com presença
e ausência de anomalias; a diminuição de riscos a
profissionais da área e pacientes, visto que o
treinamento pode ser realizado sem o receio de causar
danos aos pacientes [7].
Para que seja possível a aquisição de habilidades e
conhecimentos sobre determinado procedimento, a
interação entre o usuário e o computador é parte
fundamental na construção de aplicações desta
natureza.
Por isso, nesta categoria de aplicações é desejável
interação com suporte a dispositivos de entrada e saída
para possibilitar a comunicação entre homem e
máquina de maneiras diversas. Além disso, aplicações
médicas virtuais precisam atender outros requisitos,
como precisão e respostas em tempo real, para permitir
uma simulação mais realista [4].
O presente artigo tem o objetivo de apresentar
alguns problemas e desafios decorrentes da
implementação de um módulo de interação em um
Keywords
Interaction, evaluation, conventional devices, nonconventional device.
Resumo
Este artigo apresenta a implementação de um
módulo de interação incorporado a um framework de
Realidade Virtual (RV), que visa a facilitar a
implementação de ferramentas de treinamento médico
para simular exames de biópsia. O objetivo específico é
apresentar problemas e desafios percebidos durante a
implementação e expor soluções adotadas, com a
finalidade de obter um grau mais elevado de realismo.
O módulo suporta dispositivos convencionais (teclado
e mouse) e não convencionais (equipamento háptico e
luva de dados). As aplicações geradas por meio do
framework foram avaliadas por estudantes e
professores da área médica.
Palavras-Chave
Interação, avaliação, dispositivos
dispositivos não convencionais.
convencionais,
framework para treinamento médico, e algumas
soluções adotadas até o momento. Com isto, pretendese contribuir para que outros pesquisadores dedicados a
esta área, economizem tempo para encontrar soluções
de questões semelhantes no desenvolvimento de suas
aplicações.
Para atingir seu objetivo, este artigo está composto
da seguinte forma: a seção 2 expõe o framework
OMITTED FOR BLIND REVIEW e a implementação
do módulo de interação; a seção 3 apresenta problemas
encontrados no desenvolvimento do módulo de
interação e na avaliação do OMITTED FOR BLIND
REVIEW, bem como algumas soluções adotadas; a
seção 4 apresenta resultados obtidos com as soluções
adotadas e a seção 5 disponibiliza as conclusões.
2. Desenvolvimento do projeto
O desenvolvimento do projeto considerou
inicialmente a simulação de um procedimento médico
denominado biópsia, que consiste na utilização de um
instrumento médico (uma seringa, por exemplo) a ser
manipulada por um médico, inserindo a agulha em uma
região do corpo do paciente, com o intuito de coletar
material para posterior análise laboratorial. Esse
procedimento é utilizado para a confirmação de
diagnósticos quando há suspeita de anomalias.
Uma abordagem adotada na implementação foi a
utilização de um framework para gerar aplicações
relacionadas a este tipo de treinamento. O projeto
completo é a soma de diversos trabalhos, que
constituem diferentes etapas de desenvolvimento.
Neste artigo será descrito o módulo de interação, que
dá suporte a equipamentos convencionais e não
convencionais. Além da implementação da interação
foi realizada uma avaliação do primeiro protótipo com
usuários da área médica, proporcionando a análise de
problemas considerando as aplicações geradas pelo
framework como um todo.
O OMITTED FOR BLIND REVIEW é
um
framework de RV, orientado a objetos, desenvolvido
com o uso das linguagens de programação Java e C++,
e a API (Application Programming Interface) Java3D.
Com suas classes e métodos é possível construir um
Ambiente Virtual (AV) que disponibiliza um objeto
que representa o instrumento médico virtual e outro
que representa o órgão humano. Os objetos podem ser
modelados externamente ao framework e utilizado nas
aplicações. Além disso, as seguintes funcionalidades
relacionadas ao domínio estão disponíveis: deformação
do objeto que representa o órgão humano; detecção de
colisão com precisão, que define o momento em que o
objeto virtual que representa o instrumento médico
encontra o objeto virtual que representa o órgão
humano;
modelagem
adequada
de
objetos
tridimensionais,
definindo
características
e
comportamentos dos objetos que representarão o
instrumento médico, o órgão humano, ou qualquer
outro objeto; estereoscopia, permitindo uma sensação
de imersão para proporcionar mais realismo; suporte a
dispositivos convencionais e não convencionais para
possibilitar a interação entre usuário e sistema
computacional [2].
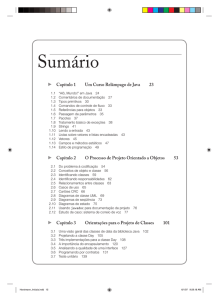
Inicialmente, a interação do OMITTED FOR BLIND
REVIEW se dava da seguinte forma: o usuário ou
participante da simulação manipulava o instrumento
médico por meio do mouse, e a aplicação identificava a
ocorrência de colisão, realizando a deformação do
local onde a colisão foi detectada no objeto que
representa o órgão humano, conforme pode ser
verificado na Figura 1.
2.1 Framework de RV
Frameworks consistem em recursos para
reutilização de componentes de software, permitindo o
aumento da produtividade na construção de aplicações
dentro de um determinado domínio de problemas,
incluindo o projeto e a implementação destas [5].
Conforme mencionado, foi inicialmente planejada a
construção de um framework para gerar aplicações de
treinamento médico, delimitando o domínio para
simulação de exames de biópsia. O framework
OMITTED FOR BLIND REVIEW (Virtual Medical
Training) encontra-se em estágio de desenvolvimento.
Figura 1. Exemplo de aplicação gerada pelo
OMITTED FOR BLIND REVIEW inicial [2]
Com a implementação do módulo de interação, o
AV gerado pelo OMITTED FOR BLIND REVIEW foi
adaptado para importar um terceiro objeto, ou melhor,
uma coleção de objetos dispostos hierarquicamente
para composição de uma mão virtual, apresentada na
Figura 2, que representaria o ato de segurar e soltar o
órgão humano durante o exame de biópsia, para
inserção do instrumento médico.
mão do usuário está sendo fechada para segurar o
objeto virtual que representa o órgão humano,
resultando na rotação dos conjuntos de objetos que
representam os dedos. A ação de liberar essas teclas
indica que a mão do usuário está sendo aberta, e o
órgão humano virtual deve ser solto, resultando na
inversão da rotação dos dedos virtuais. Desta forma,
cada tecla está associada a um conjunto de objetos
virtuais que representa cada dedo do usuário. A Figura
4 apresenta a interação por meio do teclado.
Figura 2. Objeto mão no AV
2.2 Módulo de interação
O módulo de interação foi planejado com o intuito
de proporcionar o uso de dispositivos convencionais e
não convencionais, tendo em vista imprimir uma
flexibilidade ao OMITTED FOR BLIND REVIEW, de
tal forma que o usuário possa selecionar as formas de
interação, considerando seus recursos disponíveis. Os
dispositivos convencionais são um mouse comum e um
teclado, e os não convencionais são uma luva de dados
5DT Data Glove 5 Ultra, fabricada pela 5DT (Fifth
Dimension Technologies), e um equipamento háptico,
modelo PHANTOM Omni, desenvolvido pela empresa
SensAble Technologies. Cada dispositivo está
associado a um objeto presente no AV, e atua sobre ele
conforme a ação do usuário.
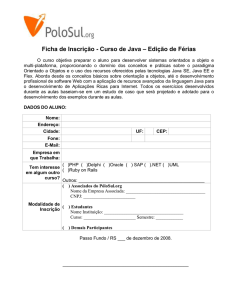
O mouse comum está associado ao objeto virtual
que representa o instrumento médico. O dispositivo
capta e envia à aplicação informações sobre os
movimentos realizados pelo usuário, bem como
informações sobre o pressionamento dos botões do
dispositivo, para que a aplicação realize movimentos
de translação e rotação no instrumento médico. A
Figura 3 mostra o uso do mouse.
Figura 4. Utilização do teclado
A 5DT DataGlove 5 Ultra é apresentada na Figura
5 e está associada à mão virtual, de forma semelhante
ao teclado. Este dispositivo possui cinco sensores de
fibra óptica, que permitem a captação de informações
como a flexão dos dedos da mão do usuário [1]. Essas
informações são transferidas à aplicação para a
realização de movimentos de rotação nos conjuntos de
objetos virtuais que representam os dedos. Desta
forma, a luva de dados indica o ato de segurar e soltar
o objeto virtual que representa órgão humano pela
flexão dos dedos do usuário.
Figura 5. Uso da 5DT DataGlove 5 Ultra
Figura 3. Utilização do mouse
O teclado está associado à mão virtual, que é
constituída por um conjunto de objetos virtuais,
dispostos hierarquicamente para formar os dedos. A
interação ocorre por meio do pressionamento ou da
liberação de teclas específicas, que são analisadas pela
aplicação. A ação de pressionar tais teclas indica que a
Por último, o PHANTOM Omni, é um dispositivo
háptico associado ao objeto que representa o
instrumento médico. Tal dispositivo capta dentre outras
informações, movimentos de translação e rotação nos
eixos x, y e z, caracterizando um dispositivo de seis
graus de liberdade, além de fornecer retorno de força
nos três eixos [8]. O conceito de háptico está
relacionado à ciência do tato, considerando força e
sensação propiciadas por esse sentido [6].
Desta forma, a aplicação recebe tais informações do
dispositivo, e altera a translação e a rotação do objeto
virtual que representa o instrumento médico, além de
retornar força, criando uma determinada resistência,
quando a colisão é detectada, indicando que o
instrumento médico tocou o órgão humano. A interação
por meio do dispositivo PHANTOM Omni pode ser
visualizada na Figura 6.
Figura 6. Uso do PHANTOM Omni
Com o módulo de interação implementado é
possível, ao gerar a aplicação usando o OMITTED
FOR BLIND REVIEW, optar pela combinação de
dispositivos,
levando
em
consideração
a
disponibilidade financeira e o realismo necessário. Os
equipamentos não convencionais possuem custo mais
elevado quando comparados com os convencionais. O
grau de realismo é maior quando são usados
dispositivos não convencionais, projetados para que o
usuário realize tarefas, interagindo com o AV de forma
natural, semelhante à execução de tais tarefas no
ambiente real.
O módulo de interação também permite que mais de
um
dispositivo
seja
usado
na
interação
simultaneamente, oferecendo diversas combinações,
tais como: dispositivo háptico e teclado, dispositivo
háptico e luva de dados, mouse e teclado, mouse e luva
de dados. Na próxima seção são apresentados os
problemas e as soluções adotadas na construção do
módulo de interação e na avaliação do OMITTED FOR
BLIND REVIEW.
3. Implementação e avaliação – problemas
e soluções
Esta seção apresenta os problemas encontrados
durante a implementação e as soluções adotadas para
cada um deles.
O primeiro problema encontrado na implementação
do módulo de interação foi com relação aos
dispositivos não convencionais (luva de dados e
equipamento háptico), que possuem drivers e
bibliotecas com funções pré-definidas, desenvolvidas
pelos fabricantes e escritas nas linguagens de
programação C e C++.
No entanto, o OMITTED FOR BLIND REVIEW está
sendo desenvolvido em linguagem de programação
Java, visto que oferece diversos benefícios, tais como:
portabilidade, gratuidade, classes e métodos prontos. A
API Java 3D também está sendo empregada, por
apresentar os mesmos benefícios e permitir a criação
de Ambientes Virtuais.
Para resolver esse problema, duas idéias foram
consideradas: a primeira consistia na construção de
drivers para os dispositivos utilizando a linguagem de
programação Java, e a segunda consistia na integração
entre as linguagens de programação C/C++ e Java,
ambas apresentando vantagens e desvantagens.
A construção de drivers envolve questões como
conhecimento de instruções para estabelecer a
comunicação entre dispositivo e computador,
consistindo em programação de baixo nível e
operações sobre as portas de comunicação (serial,
FireWire, USB (Universal Serial Bus), entre outras),
dispêndio de tempo para desenvolvimento e testes. Já a
integração de linguagens de programação engloba o
estudo aprofundado das linguagens, bem como a
pesquisa de recursos disponíveis para realizar a
integração, além de testes.
A solução adotada foi a integração das linguagens
de programação Java e C++, visto que deduziu-se que
o tempo de implementação desta seria inferior ao
tempo de construção de drivers, além deste tipo de
procedimento não ser apresentado na literatura de
forma detalhada, podendo significar uma importante
contribuição para a comunidade científica.
O recurso escolhido para realizar a integração foi o
JNI (Java Native Interface), encontrado no JDK (Java
Development Kit) que possibilita a interoperação entre
a linguagem de programação Java e outras linguagens,
como C, C++ e Assembly [9]. Desta forma, é possível
escrever métodos em linguagem de programação Java,
denominados de métodos nativos, para acessar funções
escritas em código nativo, no caso, escritas em
linguagem de programação C++, onde estão as funções
e comandos disponibilizados em bibliotecas dos
fabricantes.
Além disso, se faz necessária a utilização de
bibliotecas de ligação, nos Sistemas Operacionais
Windows, as denominadas DLLs (Dynamic-Link
Libraries), que são geradas por meio de compiladores.
No presente projeto, o compilador adotado foi o
Microsoft Visual C++ 6.0 devido à familiaridade da
equipe de desenvolvimento com esta tecnologia,
entretanto, outros compiladores, e até mesmo outros
Sistemas Operacionais. Os softwares oferecidos pelos
fabricantes, como o OpenHaptics Toolkit, para controle
do dispositivo háptico, possui versão para outras
plataformas, como Linux e MacOS.
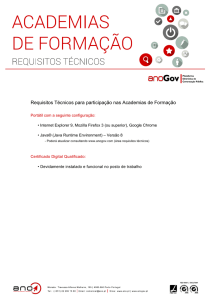
A Figura 7 apresenta o diagrama do fluxo de
informações entre o usuário e o sistema computacional,
no qual os dispositivos utilizados para a comunicação
entre ambos são a luva de dados e o monitor de vídeo.
Figura 8. Diagrama de integração e interação
para o PHANTOM Omni [3]
Figura 7. Diagrama de integração e interação
para a DataGlove 5 Ultra [3]
A Figura 8 mostra o diagrama de integração e
interação para o dispositivo háptico, semelhante ao
diagrama anterior, com os fluxos de informações entre
a aplicação, situada no sistema computacional e o
usuário, que atua sobre o sistema por meio do
dispositivo háptico, bem como os fluxos entre as partes
da aplicação, escritas em linguagem de programação
Java e C++, sendo que nesta última estão contidas as
funções do OpenHaptics Toolkit, e a biblioteca de
ligação Haptic.dll, para fornecer a interface de
comunicação entre ambas as partes.
A diferença entre os diagramas é a existência do
fluxo de informações em ambas as direções no
segundo, relacionado ao dispositivo háptico. Isso
indica que a parte da aplicação escrita em Java recebe
informações, que passam do dispositivo para a parte da
aplicação escrita em linguagem de programação C++,
desta para a biblioteca de ligação, e da biblioteca para
a parte da aplicação em Java, que realiza alterações no
objeto virtual de acordo com tais informações,
apresentando essas alterações no monitor de vídeo.
A parte da aplicação desenvolvida em linguagem de
programação Java calcula o retorno de força de acordo
com parâmetros pré-estabelecidos e envia essas
informações para o dispositivo, fazendo o caminho
inverso. O PHANTOM Omni realiza o feedback,
proporcionando sensações táteis no usuário.
Outro problema identificado estava relacionado à
modelagem do objeto virtual para representação da
mão do usuário no AV, no que diz respeito ao grau de
realismo para a rotação dos dedos de acordo com as
informações da luva de dados. Como a luva de dados
possui um único sensor para cada dedo, o movimento
de qualquer parte ou falange de um dedo indica o
movimento do dedo todo. Por isso, o dedo virtual foi
modelado com uma determinada inclinação,
constituído por três objetos virtuais distintos, conforme
pode ser visualizado na Figura 9. Pode-se observar a
divisão dos membros da mão, pois há uma hierarquia
no movimento das falanges dos dedos. Na modelagem
os objetos virtuais são dispostos da seguinte forma: as
pontas dos dedos são penduradas no corpo dos
respectivos dedos, os corpos dos dedos são pendurados
nas esferas de rotação, e as esferas são penduradas na
palma da mão.
As esferas de rotação são utilizadas para que os
conjuntos que formam os dedos virtuais possam
rotacionar de forma correta, permitindo que a rotação
se limite ao centro de cada esfera, e não ao centro do
objeto dedo como um todo, propiciando um maior
realismo [3].
Os objetos que formam a mão virtual foram
modelados separadamente e conectados no AV por
meio de métodos disponíveis no Java3D, adicionando
os objetos como nós na estrutura do grafo de cena.
Uma ação semelhante ocorreu com o objeto virtual
seringa, que representa o instrumento médico, na qual
uma esfera de rotação de tamanho reduzido foi
adicionada na ponta desta, como pode ser visualizado
na Figura 10, permitindo que a rotação do objeto
ocorra de forma correta.
aplicação e as opiniões dos usuários sobre conforto
com os dispositivos, facilidade de uso, bem como o
conhecimento dos mesmos sobre RV e nível de
entendimento sobre a tarefa a ser realizada no AV. A
Figura 12 apresenta o AV para a avaliação.
Figura 9. Estrutura de modelagem da mão
Figura 12. AV gerado para a avaliação
Figura 10. Estrutura de modelagem da seringa
Após essas etapas de implementação, a aplicação
passou a apresentar o AV com três objetos, conforme
pode-se notar na Figura 11.
Uma avaliação preliminar com um professor da
Faculdade de Medicina de Marília, que também
indicou os estudantes para os testes, relacionou
determinados problemas, sendo que alguns foram
solucionados para a segunda etapa da avaliação,
realizada com alunos, conforme apresentado a seguir.
No que diz respeito à visualização, visto que os
testes seriam realizados com objetos virtuais em
aramado e objetos com cores que simulavam textura, o
treinamento com objetos coloridos foi dispensado, pois
dificultava a visualização dos objetos e a deformação
do órgão humano, como pode-se observar na Figura
13.
Figura 11. Aplicação gerada com três objetos
Uma etapa importante deste projeto, conforme
mencionado, é a avaliação de um primeiro protótipo,
testando não somente o módulo de interação, mas a
aplicação como um todo.
Assim como na implementação, alguns problemas
foram identificados na fase de avaliação, comprovando
a importância da opinião dos usuários da área de
aplicação durante o desenvolvimento de aplicações de
RV.
A avaliação das aplicações geradas por meio do
OMITTED FOR BLIND REVIEW envolveu aspectos
computacionais e humanos e foi realizada com o
auxílio de profissionais de Medicina. Desta forma,
foram coletados dados sobre o desempenho da
Figura 13. Aplicação com objetos coloridos
Desta forma, a visualização em wireframe foi
adotada. Outro ponto discutido foi com relação ao
objeto virtual que representa o órgão humano, no caso,
a mama virtual. De acordo com a opinião do
profissional consultado, a modelagem que contempla
somente o órgão humano dificulta a percepção espacial
do aprendiz. Por isso, um objeto virtual mais completo,
incluindo o tórax, apresentado na Figura 14, foi
modelado.
Figura 14. Tórax com ductos modelados
Outro problema apontado foi com respeito à
utilização simultânea da mão virtual e o instrumento
médico, que resultava em dificuldades durante a
interação. A luva usada atualmente não possui sensor
de posição e, por isso, a mão virtual é um objeto
estático no AV, permitindo somente os movimentos de
rotação dos dedos virtuais. Desta forma, optou-se pelo
treinamento com os dispositivos de forma separada,
conforme as Figuras 15 e 16, retirando a mão virtual do
AV quando a luva de dados não estava sendo
empregada. Uma solução futura e mais adequada para
esta questão é a aquisição de luvas com sensor de
posição ou o acoplamento de um sensor de posição no
dispositivo usado atualmente.
Após ter solucionado os primeiros problemas
identificados na avaliação preliminar, passou-se à
segunda etapa da avaliação, durante a qual estudantes
de Medicina testaram o protótipo. Novos problemas
foram identificados e soluções foram sugeridas, como:
visualização com texturas mais elaboradas para os
objetos virtuais; aperfeiçoamento da visualização,
principalmente na questão da percepção de
profundidade, o que pode ser realizado com óculos
estereoscópicos; utilização de objeto físico, uma mama
de borracha, por exemplo, a ser acoplada no
dispositivo háptico, com o intuito de melhorar a
percepção; problema do retorno de força contínuo após
a identificação de colisão e a ocorrência da rotação
incorreta do objeto virtual que representa o instrumento
médico, sendo que ambos acontecem casualmente;
métodos mais precisos de colisão e deformação, bem
como métodos mais precisos para o retorno háptico,
envolvendo tecidos diversos que compõem o órgão
humano, ângulos de inclinação do instrumento médico
virtual durante a inserção.
Para coletar as opiniões dos usuários, dois
questionários foram empregados: um antes e outro após
os testes com as aplicações. O primeiro apresentava
questões sobre o nível de experiência com dispositivos
de RV e aplicações desta natureza, nível de experiência
na realização de procedimentos de biópsia,
entendimento da tarefa a ser executada no AV (parte do
procedimento de biópsia), opinião sobre a utilização de
simuladores para treinamento médico.
O segundo apresentava questões sobre facilidade de
uso, nível de satisfação e dificuldade com dispositivos
convencionais e não convencionais, e com relação à
combinação de dispositivos, bem como a contribuição
do aspecto visual do AV no treinamento, além de
idéias e sugestões.
4. Resultados e Discussões
Figura 15. Treinamento com a mão virtual
Figura 16. Treinamento com o instrumento
médico, sem a mão virtual
O módulo de interação foi construído, oferecendo
suporte a dispositivos convencionais (teclado e mouse
comum) e não convencionais (luva de dados e
dispositivo háptico), que podem ser utilizados em
aplicações separadamente ou em combinações.
A integração entre linguagens de programação foi
adotada para inclusão dos dispositivos não
convencionais no módulo de interação, sendo que a
interface de programação nativa JNI foi escolhida para
permitir essa implementação.
A modelagem dos objetos que representam a mão
virtual apresentou uma elevação no grau de realismo,
mesmo com as limitações da luva utilizada.
O desempenho da aplicação, calculado de acordo
com o tempo de resposta e o número de quadros por
segundo, atingiu um nível satisfatório, visto que a
sensação de realismo foi propiciada, mesmo com a
integração de linguagens de programação e a utilização
de dispositivos não convencionais.
No que diz respeito aos estudantes e professores de
Medicina, estes forneceram contribuições importantes
para o aperfeiçoamento do framework e,
conseqüentemente, da aplicação, tais como: correlação
espacial entre realidade e AV, utilização de detector de
posição para a luva de dados, alterações na
visualização, refinamento do retorno de força.
No entanto, pôde-se observar e confirmar com
relatos dos próprios voluntários, que eles tiveram
dificuldades na realização da tarefa no AV, resultando
em tempos elevados de execução, devido
principalmente à visualização, que tornava difícil a
percepção de profundidade, levando a uma
desorientação durante a interação.
5. Conclusões
Um simulador construído com técnicas de RV para
treinamento médico pode auxiliar profissionais da área,
contribuindo para a aquisição de conhecimento, o que
abrange diversos benefícios, como a diminuição de
riscos à saúde de pacientes. No entanto, conforme
mencionado, a construção de aplicações desta natureza
não é uma tarefa trivial, apresentando diversos
problemas, como os encontrados no desenvolvimento
do OMITTED FOR BLIND REVIEW, objetos de
análise deste artigo.
Os problemas podem ser classificados como
solucionados, parcialmente solucionados e ainda não
resolvidos. Os solucionados envolvem a diversidade de
linguagens de programação (Java e C++), resolvido
com a implementação da integração citada; a
estruturação e a modelagem da mão virtual para
resolver o problema da limitação da luva de dados,
permitindo alcançar um realismo mais elevado e a
construção mais elaborada de um modelo que
represente o órgão humano.
Dentre os parcialmente resolvidos, pode-se citar: o
aumento da facilidade de uso da aplicação, realizando
o procedimento de biópsia em fases separadas,
utilizando um dispositivo de cada vez, sendo que o
ideal seria a adoção de um detector de posição para
identificar os movimentos de translação da luva de
dados e permitir a execução da tarefa com a mão
virtual e o instrumento médico simultaneamente; o
refinamento da correlação espacial, que gerou uma
ligeira melhora para o treinamento.
E, finalmente, os problemas não solucionados até o
momento, sendo que alguns foram levantados pelo
professor e pelos estudantes, a citar: visualização dos
objetos virtuais e percepção espacial, utilizando
texturas próximas da realidade e pontos de vista
diferentes do AV; percepção espacial com o emprego
de objeto físico, confeccionado com material de
borracha, por exemplo, a ser acoplado no dispositivo
háptico; retorno de força contínuo após a detecção de
colisão e a rotação incorreta do objeto virtual que
representa o instrumento médico, sendo que ambos
problemas acontecem casualmente; métodos mais
precisos de colisão e deformação, bem como métodos
mais completos para o retorno háptico, englobando
tecidos diversos que constituem o órgão humano
(camadas da pele), ângulos de inclinação do
instrumento médico virtual durante a inserção e
extração.
O estudo dos problemas e soluções adotadas é uma
questão importante para o aperfeiçoamento das
aplicações. Além de fornecer subsídios para que as
mesmas tornem-se mais realistas, pode contribuir para
a diminuição de esforços na resolução de questões já
solucionadas.
6. Referências
[1] 5DT Fifth Dimension Technologies, disponível em:
http://www.5dt.com/hardware.html,
acessado
em
06/03/2007.
[2] OMITTED FOR BLIND REVIEW
[3] OMITTED FOR BLIND REVIEW
[4] OMITTED FOR BLIND REVIEW
[5] J. Bosch, M. Mattsson, “Framework problems and
Experiences”, FAYAD, M. J., JOHNSON, R., SCHMIDT,
D., Building Application Frameworks: Object-Oriented
Foundations of Framework Design, New York: John Wiley
and Sons, 1999, p. 55-82.
[6] J. M. Burns et al. “The Virtual Haptic Back for
Palpatory”, Proc. 6th International Conference on
Multimodal. Interraction, State College, PA, USA, 2004, p.
191-197.
[7] L. S. Machado et al., “SITEG – Sistema Interativo de
Treinamento em Exame Ginecológico”, Proc. 8th SVR
Symposium on Virtual. and Augumented Reality, Belém, PA,
Brasil, CD-ROM, 2006.
[8]SensAble
Technologies,
Disponível
http://www.sensable.com, acessado em 06/03/2007.
em:
[9] Sun, “Java Native Interface Specification”, Disponível
em:
http://java.sun.com/j2se/1.4.2/docs/guide/jni/spec/jniTOC.ht
ml, acessado em 15/03/2007.