UNIVERSIDADE FEDERAL DE ITAJUBA
– UNIFEI –
Laboratório de EEL702
Inversor de Freqüência
Soft-Starter
Retificadores não-controlados
Retificadores semi-controlados e Totalmente
Controlados
Aluno: Jhonatan Maxwel Barreto dos Santos
Número: 12867
Itajubá, 28 de junho de 2009
Inversores de Freqüência
A eletrônica de potência, com o passar do tempo, vem tornando mais fácil (e mais
barato) o acionamento em velocidade variável de motores elétricos. Com isto, sistemas que
antes usavam motores CC, pela facilidade de controle, hoje podem usar motores CA de
indução graças aos Inversores de Freqüência, também chamados de Conversores de
Freqüência.
Em paralelo ao avanço da eletrônica de potência, a microeletrônica, por meio de
microprocessadores e microcontroladores, tem auxiliado muito o acionamento de máquinas
CA, permitindo a implementação de funções complexas num tempo de processamento cada
vez mais curto. Isto tem permitido a implementação de sofisticados algoritmos de controle
que possibilitam o acionamemnto de alto desempenho com o emprego de motores de
indução de série.
Funcionamento do Inversor de Freqüência
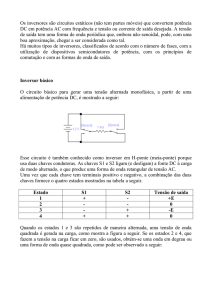
O funcionamento de um Inversor de Freqüência, é necessário, antes de tudo, saber a
função de cada bloco que o constitui. Ele é ligado na rede elétrica, que pode ser monofásica
ou trifásica, e em sua saída há uma carga que necessita de uma freqüência diferente daquela
da rede. De acordo com a figura1, o inversor tem como primeiro estágio, um circuito
retificador, responsável por transformar a tensão alternada em contínua. Após isso, existe
um segundo estágio capaz de realizar o inverso, ou seja, a transformação de uma tensão CC
para uma tensão CA (conversor), e com a freqüência desejada pela carga. Na rede de
entrada a freqüência é fixa (60 Hz ou 50 Hz) e a tensão é transformada pelo retificador de
entrada em contínua pulsada (retificação de onda completa). O Capacitor (filtro)
transforma-a em tensão contínua pura de valor aproximado de Esta tensão contínua é
conectada ciclicamente aos terminais de saída pelos dispositivos semicondutores do
inversor, transistores ou tiristores, que funcionam como chaves estáticas. O controle desses
dispositivos semicondutores é feito pelo circuito de comando, de modo a obter um sistema
de tensão pulsada, cujas freqüências fundamentais estão defasadas de 120°. A tensão é
escolhida de mo do que a relação tensão/freqüência seja constante, resultando em operação
com fluxo constante e, por via de conseqüência, manutenção da máxima capacidade de
sobrecarga momentânea do motor.
Figura 1 – Estágios do inversor de Freqüência
Seção Retificadora
Os seis diodos retificadores situados no circuito de entrada do inversor, retificam a
tensão trifásica da rede de entrada (L1, L2 e L3). A tensão DC resultante é filtrada pelo
capacitor C e utilizada como entrada para a Seção Inversora
Seção Inversora
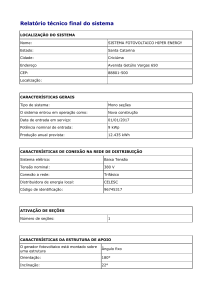
Na seção inversora, a tensão retificada DC é novamente convertida em Trifásica
AC. Os transistores chaveiam várias vezes por ciclo, gerando um trem de pulsos com
largura variável senoidalmente (PWM). Esta saída de tensão pulsada, sendo aplicada em um
motor (carga indutiva), irá gerar uma forma de onda de corrente bem próxima da senoidal
através do enrolamento do motor.
Abaixo, a forma de onda na saída do inversor:
Figura 2 - Onda na saída do inversor
Tipos de Inversores de Frequência
Inversor Escalar
Em linhas gerais, podemos dizer que os inversores escalares baseiam-se em
equações de regime permanente. A lógica de controle utilizada é a manutenção da relação
V/F constante. Apresentam um desempenho dinâmico limitado e usualmente são
empregados em tarefas simples, como o controle da partida e da parada e a manutenção da
velocidade em um valor constante (regulação).
Inversor Vetorial
A lógica de controle empregada baseia-se em equações dinâmicas do motor; Assim,
embora a programação de controle seja mais complexa do que aquela correspondente ao
controle escalar, o desempenho dinâmico é bem superior a este. A idéia central é promover
o desacoplamento entre o controle do fluxo e o controle da velocidade por meio de
transformações de variáveis. Com esta técnica de controle, os inversores podem ser
empregados em tarefas complexas, que exijam grande precisão e dinâmicas rápidas do
ponto de vista de controle. Os inversores Vetoriais podem ser divididos em duas categorias:
aqueles que utilizam a realimentação física da velocidade, obtida de dispositivos
transdutores, e aqueles que não empregam a realimentação física da velocidade, fazendo
uso de estimadores de velocidade. A realimentação ou "Feedback", permite "enxergar" o
movimento do eixo do motor possibilitando controlar a velocidade e o torque com alta
precisão mesmo em velocidades muito pequenas, próximas de zero. A realimentação da
velocidade é realizada utilizando um gerador de pulsos, conhecido com "Encoder". Alguns
equipamentos permitem a utilização dos dois modos, sendo necessário uma placa opcional
para a operação de malha fechada. A operação sem a realimentação da velocidade é também
conhecida como "Sensorless". Nesse caso, o algoritmo de controle torna-se mais complexo
pois o inversor deve calcular através de artifícios matemáticos a velocidade do motor. A
operação sem realimentação possui performance inferior à operação com realimentação. Os
Inversores Vetoriais necessitam da programação de todos os parâmetros do motor como,
resistências elétricas, indutâncias, correntes nominais do rotor e estator, dados esses
normalmente não encontrados com facilidade. Para facilitar o set-up, alguns inversores
dispõem de sistemas de ajustes automáticos também conhecidos como "Auto-tunning", não
sendo necessário a pesquisa de dados sobre o motor.
Diferenças entre Inversores Escalares e Vetoriais
A principal diferença entre os inversores Escalares e os Vetoriais deve-se a
capacidade dos inversores vetoriais imporem o torque necessário ao motor, de forma precisa
e rápida permitindo uma elevada velocidade de resposta dinâmica a variações bruscas de
carga. Os Invesores Escalares apresentam uma resposta dinâmica bem mais lenta,
demorando mais para reagir a qualquer alteração de velocidade ocorrida ou solicitada.
Cuidados que devemos ter ao instalar um inversor
1. Não há inversor no mundo que resista à ligação invertida de entrada da rede elétrica
(trifásica ou monofásica), com a saída trifásica para o motor.
2. O aterramento elétrico deve estar bem conectado, tanto ao inversor como ao motor. O
valor do aterramento nunca deve ser maior que 5. (norma IEC536), e isso pode ser
facilmente comprovado com um terrômetro, antes da instalação.
3. Caso o inversor possua uma interface de comunicação( RS 232, ou RS 485) para o PC, o
tamanho do cabo deve ser o menor possível.
4. Devemos evitar ao máximo, misturar (em um mesmo eletroduto ou canaleta), cabos de
potência (rede elétrica, ou saída para o motor) com cabos de comando (sinais analógicos,
digitais, RS 232, etc...).
5. O inversor deve estar alojado próximo a “orifícios” de ventilação, ou, caso a potência
seja muito alta, deve estar submetido a uma ventilação (ou exaustão). Alguns inversores já
possuem um pequeno exaustor interno.
6. A rede elétrica deve ser confiável, isto é, jamais ultrapassar variações de +ou- 10% em
sua amplitude.
7. Sempre que possível, utilizar os cabos de comando devidamente blindados.
8. Os equipamentos de controle (PLC, CNC, PC, etc...), que funcionarem em conjunto com
o inversor, devem possuir o "terra" em comum. Normalmente, esse terminal vem indicado
pela referência “PE” ( proteção elétrica), e sua cor é amarela e verde (ou apenas verde ).
9. Utilizar sempre parafusos e arruelas adequadas para garantir uma boa fixação ao painel.
Isso evitará vibrações mecânicas. Além disso, muitos inversores utilizam o próprio painel
em que são fixados como dissipador de calor. Uma fixação pobre, nesse caso, causará um
aquecimento excessivo ( e possivelmente sua queima ).
Soft-starter
Nos processos modernos de partida do motor de indução, são usados soft-starters
que, através de comando microprocessado, controlam tiristores que ajustam a tensão
enviada ao estator do motor. Desta forma, consegue-se, de um lado, aliviar o acionamento
dos altos conjugados de aceleração do motor de indução e, de outro, proteger a rede elétrica
das correntes de partida elevadas.
As chaves de partida estática são chaves microprocessadas, projetadas para acelerar
(ou desacelerar) e proteger motores elétricos de indução trifásicos. Através do ajuste do
ângulo de disparo de tiristores, controla-se a tensão aplicada ao motor. Com o ajuste correto
das variáveis, o torque e a corrente são ajustados às necessidades da carga, ou seja, a
corrente exigida será a mínima necessária para acelerar a carga, sem mudanças de
freqüência.
Algumas características e vantagens das chaves soft-starters
- Ajuste da tensão de partida por um tempo pré-definido;
- Pulso de tensão na partida para cargas com alto conjugado de partida;
- Redução rápida de tensão a um nível ajustável, (redução de choques hidráulicos em
sistemas de bombeamento);
- Proteção contra falta de fase, sobre-corrente e subcorrente, etc.
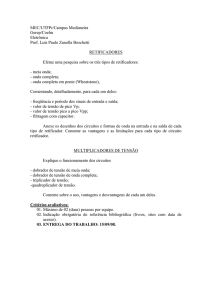
Os motores assíncronos trifásicos de rotor em gaiola apresentam picos de corrente e
de conjugados indesejáveis quando em partida direta. Para facilitar a partida são usados
vários métodos, como chave estrela-triângulo, chave compensadora, etc.
Estes métodos conseguem uma redução na corrente de partida, porém a comutação é
por degraus de tensão. Entretanto, nenhum se compara com o método de partida suave (que
utiliza o soft-starter). A figura 3 a seguir mostra o comparativo de corrente entre os métodos
mais usuais de partida:
Figura 3 – Comparativo entre métodos de partida
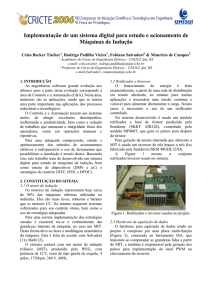
Funcionamento do Soft-starter
O soft-starter é um equipamento eletrônico capaz de controlar a potência do motor
no instante da partida, bem como sua frenagem. Ao contrário dos sistemas elétricos
convencionais utilizados para essa função (partida com autotransformador, chave estrelatriângulo, etc.).
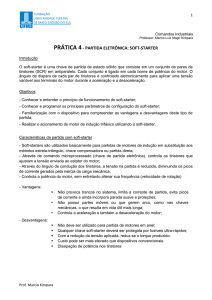
Seu princípio de funcionamento baseia-se em componentes estáticos: tiristores. O
esquema genérico de um soft-starter é mostrado na figura 4 abaixo
Figura 4 – Esquema de um soft-starter implementado com 6 tiristores
para acionar um motor de indução trifásico (MIT)
Através do ângulo de condução dos tiristores, a tensão na partida é reduzida,
diminuindo os picos de corrente gerados pela inércia da carga mecânica.
Um dos requisitos do soft-starter é controlar a potência do motor, sem entretanto
alterar sua freqüência (velocidade de rotação). Para que isso ocorra, o controle de disparo
dos SCRs (tiristores) atua em dois pontos: controle por tensão zero e controle de corrente
zero.
O circuito de controle deve temporizar os pulsos de disparo a partir do último valor
de zero da forma de onda, tanto da tensão como da corrente. O sensor pode ser um
transformador de corrente que pode ser instalado em uma única fase (nesse caso, o sistema
mede somente o ponto de cruzamento de uma fase), ou um para cada fase.
RECURSOS DE UM SOFT-STARTER
Os soft-starters existentes no mercado (fabricados pela WEG, SIEMENS e outras)
são equipados com interfaces homem-máquina, ou painel de LEDs para informar o status
do sistema. Quanto aos recursos que um soft-starter deve ter, os mais importantes são:
1. proteção do motor;
2. sensibilidade à seqüência de fase;
3. plug-in;
4. circuitos de economia de energia.
Proteção do Motor
A figura 5 apresenta a curva típica de sobre-corrente de um soft-starter:
Figura 5 – Curva típica de sobre-corrente de um soft-starter
Podemos notar que ela determina interrupções e bloqueios em caso de falta de fase
ou falha do tiristor. Normalmente, esses equipamentos também possuem relés eletrônicos de
sobrecarga. Durante o tempo de operação (tr), um relé eletrônico de carga entra em
operação quando necessário.
O dispositivo pode ser configurado para dar proteção tanto para sobre-correntes
(Ioc) quanto para sub-correntes (Iuc). Quando possível, utilizar para partidas de motores
chaves soft-starter que possibilitem o ajuste do torque do motor às necessidades do torque
da carga, de modo que a corrente absorvida será a mínima necessária para acelerar a carga.
Sensibilidade à seqüência de fase
Os soft-starters podem ser configurados para operarem somente se a seqüência de
fase estiver correta. Esse recurso assegura a proteção, principalmente mecânica, para cargas
que não podem girar em sentido contrário (bombas, por exemplo). Quando há a necessidade
de reversão, podemos fazê-los com contatores externos ao soft-starter.
Plug-in
O plug-in é um conjunto de facilidades que podem ser disponibilizadas no softstarter através de um módulo extra, ou através de parâmetros, como relé eletrônico,
frenagem CC ou AC, dupla rampa de aceleração para motores de duas velocidades e
realimentação de velocidade para aceleração independente das flutuações de carga.
Economia de energia
A maioria dos soft-starters modernos tem um circuito de economia de energia. Essa
facilidade reduz a tensão aplicada para motores a vazio, diminuindo as perdas no entreferro,
que são a maior parcela de perda nos motores com baixas cargas. Uma economia
significante pode ser experimentada para motores que operam com cargas de até 50% da
potência do motor. Entretanto, essa função gera correntes harmônicas indesejáveis na rede,
devido a abertura do ângulo de condução para diminuição da tensão. A figura a seguir
ilustra isso:
Figura 6 – Economia de energia usando um soft-starter
Cabe lembrar, entretanto, que o soft-starter não melhora o fator de potência, e
também gera harmônicos, como qualquer outro dispositivo de acionamento estático.
Aplicações
Os soft-starters podem ser utilizados nas mais diversas aplicações. Suas principais
são em:
• Bombas centrífugas (saneamento, irrigação, petróleo);
• Ventiladores, exaustores e sopradores;
• Compressores de ar e refrigeração;
• Misturadores e aeradores;
• Britadores e moedores;
• Picadores de madeira;
• Refinadores de papel;
• Fornos rotativos;
• Serras e plainas (madeira);
• Moinhos (bolas e martelo);
• Transportadores de carga
Retificadores não-controlados com entrada trifásica
Quando a potência da carga alimentada se eleva, via de regra são utilizados
retificadores trifásicos, como mostra a figura 7, a fim de, distribuindo a corrente entre as 3
fases, evitar desequilíbrios que poderiam ocorrer caso a corrente fosse consumida de apenas
1 ou 2 fases.
Neste caso a corrente é fornecida, a cada intervalo de 60 graus, por apenas 2 das 3
fases. Poderão conduzir aquelas fases que tiverem, em módulo, as 2 maiores tensões. Ou
seja, a fase que for mais positiva, poderá levar o diodo a ela conectado, na semi-ponte
superior, à condução. Na semi-ponte inferior poderá conduzir o diodo conectado às fase
com tensão mais negativa.
Pela fase com tensão intermediária não haverá corrente. A figura 8 mostra formas
de onda típicas considerando que o lado CC é composto, dominantemente, por uma carga
resistiva, indutiva ou capacitiva. No primeiro caso a corrente segue a mesma forma da
tensão sobre a carga, ou seja, uma retificação de 6 pulsos. Quando um filtro indutivo é
utilizado, tem-se um alisamento da corrente, de modo que a onda apresenta-se praticamente
retangular. Já com um filtro capacitivo (mantendo ainda uma pequena indutância série),
tem-se os picos de corrente. Com o aumento da indutância tem-se uma redução dos picos e,
eventualmente, a corrente não chega a se anular.
Figura 7 - Retificador trifásico, onda completa, não controlado
Figura 8 - Formas de onda no lado CA para retificador trifásico,
onda-completa, não-controlado, alimentando diferentes tipos de carga
Retificadores trifásicos
Os circuitos retificadores controlados constituem a principal aplicação dos tiristores
em conversores estáticos. Possuem vasta aplicação industrial, no acionamento de motores
de corrente contínua, em estações retificadoras para alimentação de redes de transmissão
CC, no acionamento de locomotivas, etc.
Quando a operação como inversor não é necessária, emprega-se a ponte mista com
as seguintes vantagens:
- Circuito de comando mais simples;
- Custo reduzido.
A figura 9 mostra circuitos de retificadores trifásicos. No caso a) tem-se um
retificador semicontrolado, enquanto em b) tem-se um retificador totalmente controlado.
Diferentemente do caso monofásico, no circuito trifásico não há o circuito simétrico.
Figura 9 - Retificador trifásico semicontrolado (a) e controlado (b)
Também para estes retificadores, a versão semicontrolada não permite a inversão da
tensão instantânea no barramento CC. É possível a colocação de um diodo de roda livre que
entra em operação quando tal tensão se anula. Na ausência do diodo, a condução se dá pelo
último tiristor acionado e pelo diodo do mesmo ramo.
A figura 10 mostra formas de onda para diferentes ângulos de disparo, sendo
desprezada a indutância de entrada. Este ângulo é definido a partir do ponto em que a tensão
da respectiva fase se torna a maior em valor absoluto ou, o que é equivalente, quando a
tensão de linha se torna positiva. Nestas simulações a carga é uma fonte de corrente
constante, razão pela qual não há alteração na corrente com o ângulo de disparo. Para um
ângulo nulo, as formas de onda são idênticas às do retificador a diodo. A faixa de controle
vai de 0 a 60 graus. Note-se que a condução do diodo independe do ângulo de disparo (na
ausência do diodo de livre-circulação).
A forma de onda da corrente na rede é assimétrica, dando origem a componentes
espectrais de ordem par, o que não é desejável.
A figura 11 mostra resultados análogos, também sem indutâncias de entrada, para
um retificador totalmente controlado. A carga é um circuito RL (4 Ω, 16 mH), de modo que
a corrente se altera à medida que muda o ângulo de disparo e, conseqüentemente, a tensão
média aplicada à carga. Para um ângulo de 0 grau a forma de onda é idêntica a do
retificador a diodos.
Na ausência de um diodo de roda-livre a tensão instantânea aplicada no barramento
CC pode ser negativa, o que ocorre para um ângulo de disparo superior a 60 graus. Como
não há possibilidade de inversão no sentido da corrente, uma tensão negativa leva à
diminuição da corrente até sua extinção (em uma carga passiva).
A corrente da rede é simétrica, apresentando apenas componentes espectrais de
ordem ímpar, exceto os múltiplos da terceira, que não existem.
A tensão média no barramento CC é dada por:
Uma corrente no lado CC de baixa ondulação reflete para o lado CA uma onda
quase quadrada, com condução de 120° a cada 180°, deslocada de um ângulo α em relação
à tensão.
Neste caso pode-se determinar o espectro da corrente em relação à corrente da
carga, Io. A corrente eficaz no lado CA é 81,6% da corrente no lado CC.
A componente fundamental é Ii1 = 0,78 Io , enquanto as harmônicas são dadas por:
Isto permite determinar que a distorção harmônica total da corrente é de 31,08% .
Figura 10 - Formas de onda de retificador trifásico semi-controlado.
De cima para baixo: tensão instantânea no barramento CC (vo(t)); Corrente no
diodo D1; Tensão da fase A (van(t)); Corrente na fase A.
Figura 11- Formas de onda de retificador trifásico controlado.
De cima para baixo: tensão instantânea no barramento CC (vo(t)); Corrente no
tiristor T1; Tensão da fase A (van(t)); Corrente na fase A.
BIBLIOGRAFIA:
1. RASHID, Muhammad Harunur. Power Electronics Circuits, devices and
applications. 2ª ed. Prentice Hall,