IDENTIFICAÇÃO AUTOMÁTICA DAS FOICES CEREBRAIS BASEADA NA
EQUAÇÃO DE DIFUSÃO NÃO-LINEAR
Rubens C. Pereira1, Celia A. Z. Barcelos2, Edna L. Flôres1,
Gilberto A. Carrijo1 e Antônio C. P. Veiga1
1
Faculdade de Engenharia Elétrica, Universidade Federal de Uberlândia, Av. João Naves de Ávila, 2160,
CEP: 38.400-902, Uberlândia, Minas Gerais, Brasil.
2 Faculdade de Matemática, Universidade Federal de Uberlândia, Av. João Naves de Ávila, 2160,
CEP: 38.400-902, Uberlândia, Minas Gerais, Brasil.
Resumo – Os traumas craniencefálicos (TCE) em
pacientes têm crescido a cada dia devido aos acidentes, os
quais são avaliados por meios da identificação e análise
da curva encontrada ao longo da linha média do cérebro
(LMC). Este artigo apresenta uma proposta para a
detecção automática da LMC em imagens digitais de
tomografia computadorizada baseada apenas nas foices
cerebrais superior e inferior. Estas foices são localizadas
através das saliências posicionadas sobre os contornos
internos do cérebro. Equações diferenciais parciais nãolineares e limiarização em multiníveis são utilizadas para
obter as saliências côncavas e convexas pertencentes ao
contorno do cérebro. Estas saliências indicam os pontos
de referência para identificar as foices cerebrais. A
imagem resultado mostra as bordas afinadas, as
saliências, as foices cerebral superior e inferior e a LMC
aproximada traçada sobre a imagem cerebral original.
Palavras-Chave – bordas afinadas, equação de difusão
não-linear, foices cerebrais.
THE AUTOMATIC IDENTIFICATION OF
THE CEREBRAL SICKLES BASED ON
NONLINEAR DIFFUSION EQUATION
Abstract - Cephalic traumas (CT) in patients arising
from general everyday accidents are evaluated by means
of identification and analysis of the curve found along the
median cerebral line (MCL). This article presents a
proposal for the automatic detection of the MCL in
computerized tomographic digital images based on just
the upper and lower cerebral sickles. These sickles are
located through the saliences positioned over the cerebral
internal contours. The nonlinear partial differential
equation and a multi-level threshold process are used to
obtain the concave and convex saliences belonging to
cerebral contour. These saliences indicate the reference
points in order to identify the cerebral sickles. The
obtained image results show the thin edges, the saliences,
the upper and lower cerebral sickles and the
approximated MCL traced over the original cerebral
image.
1
Nota de rodapé na página inicial será utilizada apenas pelo professor
avaliador para indicar o andamento do processo de revisão. Não suprima
esta nota de rodapé quando editar seu artigo.
Keywords - cerebral sickles, nonlinear diffusion
equation, thin edges.
I. INTRODUÇÃO
Os traumas craniencefálicos (TCE) decorrentes de
acidentes automobilísticos envolvendo pedestres, motoristas
e passageiros de automóveis e motociclistas geralmente
provocam lesões irreparáveis ao cérebro dos indivíduos
envolvidos neste tipo de acidente. O paciente traumatizado
recebe inicialmente uma avaliação clínica, o seu nível de
consciência é medido pelo uso da escala de coma de
Glasgow (ECGla) e são realizados exames por imagens como
tomografia computadorizada (TC) e ressonância magnética
(RM) com o objetivo de encontrar informações que possam
identificar da forma mais precisa a verdadeira natureza das
lesões cerebrais.
A linha média do cérebro (LMC) é um dos primeiros itens
a ser considerado quando se observa as imagens cerebrais e a
sua rápida e eficiente detecção pode auxiliar nos
procedimentos médicos evitando uma piora no quadro do
paciente, cuja lesão pode tornar-se irreversível. A LMC é
uma linha imaginária que divide o cérebro em duas porções
relativamente iguais. Para obtê-la, é necessário localizar
determinadas estruturas internas de referência como as foices
cerebrais inferior e superior e as bordas e contornos do
cérebro e crânio. Esta linha é fundamental para o cálculo do
tamanho do desvio da linha média do cérebro bem como é
importante para o médico neurologista classificar o tipo de
TCE (leve, moderado, grave) e então indicar o tratamento
mais adequado.
A identificação da LMC ou do plano sagital médio é
geralmente realizado usando duas estratégias. A primeira
consiste em obter uma linha que melhor separa os dois
hemisférios do cérebro a partir dos pontos de referência
definidos no sistema de coordenadas estereotático de
Talairach [1]. Neste enfoque, os trabalhos apresentados em
[2] e [3] detectam o plano médio sagital usando pelo menos 4
pontos marcos do atlas de Talaraich como, por exemplo, as
comissuras anterior e posterior, os pontos anterior e posterior
do corpo caloso. Esses métodos apresentam tempos de
processamento superior a 2 min para processar as imagens
cerebrais, além de tratarem imagens com rotação, assimetrias
patológicas e a cabeça inteira. O trabalho apresentado em [4]
também localiza o plano médio sagital baseado nas
referências de Talairach, utilizando os histogramas para a
seleção automática de limiares e análise de cena para obter os
pontos de referência. Esse o algoritmo possui alto custo
computacional para processar todas as imagens do paciente,
além do quê não trabalha muito bem com imagens cerebrais
com patologias.
O segundo enfoque utiliza a simetria interna das estruturas
cerebrais e é explorado nos trabalhos apresentados em [5–8].
O plano médio sagital ideal é localizado utilizando um
enfoque baseado em bordas e correlação cruzada com o
objetivo de decompor um plano que melhor se ajusta aos
eixos de simetria de cada fatia, seguido por uma estimativa
robusta dos parâmetros do plano. Os problemas detectados
nesses métodos ocorreram nas imagens cerebrais com
rotações, com as interferências das estruturas internas do
cérebro, o alto grau de assimetria interna, além do elevado
tempo de processamento devido à correlação cruzada.
Esse trabalho apresenta uma maneira simples de obter a
LMC utilizando apenas dois pontos de referência no cérebro:
as foices cerebrais superior e inferior. Embora os trabalhos
relacionados utilizem um grande número de pontos marcos, o
propósito desse trabalho é localizar apenas as duas foices
cerebrais que estão localizadas sobre as saliências
posicionadas nos contornos internos do cérebro: as saliências
côncavas e convexas. O algoritmo para a identificação da
LMC é completamente automático e o processo de
segmentação é realizado pela suavização não-linear via
equações diferenciais parciais e a limiarização em
multiníveis. As bordas afinadas são obtidas usando a direção
onde as bordas possuem maior força e as saliências côncava
e convexa são obtidas sobre as bordas afinadas. As foices são
identificadas através das saliências e a LMC é traçada com
base nessas foices.
As seguintes seções apresentam o método proposto em
detalhes, os detalhes da implementação, os resultados
experimentais e as conclusões.
II. O MÉTODO PROPOSTO
O método desenvolvido explora o uso das equações
diferenciais parciais com o propósito de localizar as foices
cerebrais superior e inferior e os contornos internos do
cérebro para, posteriormente, obter a LMC. As imagens
cerebrais oriundas de TC geralmente contêm ruído e uma
filtragem por suavização não-linear é utilizada para alcançar
dois objetivos: a) eliminar a maioria do ruído significativo, e
b) criação de um mapa de bordas contendo as bordas mais
relevantes do cérebro. Para produzir um mapa de bordas mais
significativo, uma limiarização em multiníveis é aplicada de
forma automática, com o objetivo de reduzir a perda de
importantes pixels de borda. Em seguida, a imagem
limiarizada é processada de modo que produza bordas com
largura de 1 pixel, para se localizar os contornos internos do
cérebro e as foices superior e inferior. A LMC é traçada por
um segmento de reta unindo estas duas foices.
As seguintes seções apresentam a suavização não-linear e
o afinamento de bordas usando limiarização em multiníveis
visando identificar as foices cerebrais.
A. Suavização da imagem
A suavização é obtida usando filtragem não-linear via
equações diferenciais parciais. O modelo aplicado foi o
proposto por Barcelos e Boaventura [9]. A equação do filtro
de suavização considera a imagem de entrada para
processamento como I(x,y) e produz uma imagem suavizada
no instante t, u(x,y,t) como uma solução da seguinte equação:
∇u
(1)
ut = g (| ∇ u |) | ∇u | div
− (1 − g )(u − I )
| ∇u |
com:
u ( x, y ,0) = I ( x, y ),
onde
g = g (| ∇u |) =
1
1 + k | ∇u |2
e
∂u
| ∂Ω × R+ = 0
∂n
(2)
, sendo k uma constante. I(x,y) é a
imagem para ser processada, u(x,y,t) é a sua versão suavizada
na escala t. A função g(s)>0 é uma função não-incremental,
satisfazendo g(0)=1 e g(s)→0 quando s→∞.
O termo |∇u|div(∇u/|∇u|) = ∆u – ∇2u(∇u,∇u) / |∇u|2
realiza a difusão de u na direção ortogonal ao seu gradiente
∇u e não faz a difusão em qualquer outra direção. A meta é
permitir uma suavização na imagem u de modo que ela seja
realizada em ambos os lados da borda com o mínimo de
suavização na própria borda.
O termo g(|∇u|) é utilizado para a detecção de bordas e
controla a velocidade da difusão: se ∇u tem um valor
pequeno no ponto x, ele será considerado um ponto interior e
a difusão será mais forte; por outro lado, se ∇u tem um valor
grande no ponto x, então este ponto x será considerado um
ponto de borda e a difusão será lenta desde que g(s) sempre
assume pequenos valores para grandes valores de s.
O balanço entre o termo de força e o termo de difusão é
feito por (1-g), o qual trabalho como um seletor moderador
do processo de difusão.
Após a aplicação da filtragem via equações diferenciais
parciais, é realizado um processamento em duas etapas no
mapa de bordas (g): a limiarização em multiníveis e o
afinamento das bordas, os quais são apresentados nas
próximas seções.
B. O processo de limiarização em multiníveis
A aplicação de um único limiar na imagem inteira exclui
várias bordas importantes, resultando em uma imagem
inadequada para os propósitos desejados. O uso de vales em
histogramas para a determinação de um limiar global
também não produz resultados satisfatórios.
O método proposto consiste no uso do mapa de bordas a
partir do estágio anterior e executa uma limiarização de
modo a reduzir a perda de bordas importantes localizadas nos
contornos do cérebro. Essa etapa é realizada de forma
automática e o mapa de bordas é dividido em pequenas
regiões sendo que, para cada região, os histogramas
ordenados são utilizados em ordem decrescente de acordo
com a contagem dos pixels em cada nível de cinza. Esses
histogramas ordenados são avaliados e o limiar é obtido
quando existe uma mudança brusca nos níveis de cinza. O
valor do limiar é utilizado na limiarização da respectiva
região.
A principal característica é a detecção das mudanças
bruscas nos valores dos níveis de cinza dos histogramas
ordenados indicando a interrupção no processo de avaliação
dos histogramas. Dessa forma, não há aumento da
complexidade computacional, pois cada pixel é visitado
apenas uma vez, além de se utilizar um instrumento simples
como o histograma de uma imagem. O resultado final é o
mapa de borda completamente limiarizado.
Para cada região do mapa de bordas, um histograma (Hi) é
obtido e ordenado em ordem decrescente da quantidade de
pixels dos níveis de cinza. Hi é examinado até que a primeira
lacuna (gap) seja encontrada entre os valores dos níveis de
cinza, cuja diferença seja maior ou igual a ß, e o valor do
limiar desta região é marcado como Li = Hi(k), onde k é a
posição da lacuna no histograma.
O mapa de bordas limiarizado (gt) torna possível obter as
bordas do cérebro, as estruturas internas e o crânio com a
execução dos próximos passos: a) bordas finas com largura
de 1 pixel; b) recuperação dos pixels de borda perdidos
baseada em gt e nas menores distâncias entre o fim das
bordas; e finalmente c) remoção das bordas pequenas que
não são úteis na identificação da LMC. As seções seguintes
apresentam em detalhes cada um destes passos.
C. Afinamento das bordas do cérebro, do crânio e das
estruturas internas
Para obter automaticamente as bordas finas do cérebro, do
crânio e das estruturas internas do cérebro, a imagem é
examinada e é feita a marcação dos pixels que pertencem às
bordas com maior força. Ao final deste passo, as bordas
encontradas são denominadas “bordas verdadeiras” com
largura de 1 pixel, pois foram obtidas a partir do mapa de
bordas limiarizado (gt).
Neste artigo, o termo “força de borda” representa a
direção da borda que possui o maior número de pixels com a
mesma intensidade. As bordas verdadeiras auxiliam na
localização das foices superior e inferior, as quais são
referências para a detecção automática da LMC. Elas são
obtidas pela avaliação e contagem da quantidade de pixels de
borda com maior força em todas as oito direções d1,d2,...,d8
[10]. A direção que apresentar a maior quantidade de pixels
de borda é a direção da força da borda e o pixel
correspondente é marcado como um pixel de borda
verdadeiro. Neste processo, quando duas direções têm a
mesma quantidade de pixels, ambas as direções serão
consideradas como direções de borda.
Seja gtf os pixels do primeiro plano (foreground) que estão
sendo avaliados no mapa de bordas limiarizado, para decidir
qual a direção a borda deverá seguir. O maior valor do
somatório dos pixels do primeiro plano em todas as oito
direções Sgtf (dn),n=1,...,8 é selecionado e o pixel vizinho na
direção escolhida é um pixel da borda verdadeira. A imagem
final contém apenas as bordas afinadas, isto é, as bordas
verdadeiras que serão utilizadas para localizar as foices
cerebrais superior e inferior. A próxima seção apresenta o
processo de reconstrução de bordas.
D. Reconstrução automática das bordas afinadas com base
no mapa de bordas
A LMC é detectada a partir das foices cerebrais e,
portanto, todas as bordas cerebrais importantes deveriam ser
obtidas. A reconstrução das bordas é necessária, pois a
limiarização em multiníveis possui algumas limitações,
eliminando pixels de borda importante. Desta forma, a
reconstrução das bordas afinadas decide se um pixel é parte
da borda ou não através da avaliação da vizinhança dos
pixels e considerando o mapa de bordas para esta tomada de
decisão. A avaliação da vizinhança é feita em todas as 8
direções e ela é limitada por v, a largura da vizinhança.
Caso ainda existam situações em que os segmentos de
borda não estejam conectados entre si, uma reconstrução
artificial é executada. Nessa etapa, localiza-se e traça-se o
menor segmento de reta a partir de dois pontos extremos que
pertençam a duas bordas que estejam o mais próximo
possível.
Ao final dos procedimentos de reconstrução de bordas, as
bordas pequenas são eliminadas (menores do que m pixels
contíguos), pois elas não contribuem em nada para os
estágios seguintes.
E. Traçado da linha media do cérebro a partir das foices
cerebrais
Os estágios anteriores produziram uma imagem com os
pixels de borda com largura de 1 pixel. A linha média do
cérebro é obtida pela localização dos pontos de referência a
partir das foices cerebrais superior e inferior.
A foice cerebral superior é obtida pela análise da parte
superior do contorno interno do cérebro. Primeiramente,
localiza-se as duas saliências côncavas mais elevadas a partir
do contorno interno e depois a saliência convexa menos
elevada entre as duas saliências. Desta forma, a posição
aproximada da foice cerebral superior é definida. A foice
cerebral inferior é obtida por um raciocínio inverso,
considerando a parte inferior do contorno interno do cérebro.
Um segmento de reta que une as duas foices cerebrais define
a LMC.
Os detalhes da implementação computacional são
apresentados na próxima seção.
III. DETALHES DA IMPLEMENTAÇÃO
A técnica de suavização utilizada neste artigo apresentou
resultados interessantes, pois eliminou ruídos indesejáveis e
produziu um mapa de bordas, destacando as bordas mais
relevantes da imagem. As imagens examinadas são
representadas por matrizes dos valores de intensidade N x M.
Seja uij denotando o valor da intensidade de uma imagem u
no pixel (xi,yj) com i = 1, 2,..., N e j = 1, 2,..., M. As equações
de evolução produz imagens no instante tn = n ? t com n = 1,
2,... . Nós indicamos u(xi,yj,tn) por uijn.
A derivada no tempo ut em (i, j, tn) é aproximada por
n+1
n
diferenças avançadas uij − uij . O termo de difusão
∆t
2
2
∇u u x u yy − 2u x u y u xy + u y u xx
=
| ∇u | div
2
2
ux + uy
| ∇u |
(3)
na Eq. (1) é aproximado usando diferenças centrais:
ui +1, j − u i −1, j ,
u x ( xi , y j ) ≈
2h
u i , j +1 − u i , j −1 ,
u y ( xi , y j ) ≈
2h
ui +1, j − 2ui , j + ui −1, j ,
u xx ( xi , y j ) ≈
h2
u yy ( xi , y j ) ≈
u xy ( xi , y j ) ≈
[
ui , j +1 − 2ui , j + ui , j − 1,
h2
1
ui + 1, j +1 − ui + 1, j −1 − ui −1, j + 1 + ui −1, j −1
4h2
]
com i = 1, ..., N e j = 1, ..., M.
Se indicar
∇u
L(u ) = g | ∇u | div
− λ (1 − g )(u − I )
| ∇u |
(5)
pode-se escrever a Eq. (1) na forma ut=L(u). Portanto,
usando o método de Euler:
(6)
u ijn+1 = u ijn + ∆tL (u ijn )
onde uij0= I(xi ,yi).
Nos experimentos apresentados, foi definido ?=1, n=800
(a quantidade de iterações), k=0.002 e ? t =0.01.
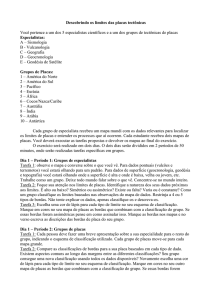
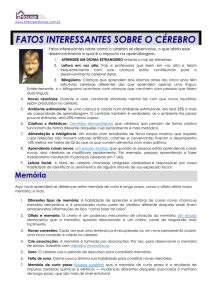
A Figura 1.a mostra a imagem original de um cérebro
lesionado e a Figura 1.b ilustra o mapa de bordas resultante
(g). Observa-se que na Figure 1.b o mapa de bordas
representa as bordas existentes da imagem original, evitando
a perda de importantes bordas, as quais são necessárias para
o processo de identificação e localização da LMC.
Após a produção do mapa de bordas, a imagem é dividida
em p regiões para a limiarização em multiníveis. Neste
trabalho, o domínio da imagem foi dividido em 6 regiões (P1
até P6), conforme mostrado na Figura 1.b. Outras partições
de domínio de imagem foram testadas, mas nenhum
resultado melhor foi encontrado.
(a)
(b)
...
32:
33:
34:
35:
36:
37:
38:
...
...
227
214
222
217
7
228
226
...
...
28
26
25
24
24
24
23
...
O próximo passo é obter as bordas afinadas com largura
de 1 pixel, de acordo com a Seção II.C.
Possíveis pixels de borda perdidos nos processos
anteriores são recuperados com o auxílio do mapa de bordas,
onde uma vizinhança de 10 pixels é analisada para produzir
um contorno contínuo. Entretanto, pode haver algumas
descontinuidades e, nestes casos, os pixels das extremidades
das bordas são conectados na direção de duas curvas cujas
extremidades têm a menor distância. Este procedimento é a
“reconstrução artificial”. As bordas formadas por menos que
50 pixels contíguos (m) são consideradas bordas espúrias e
eliminadas da imagem.
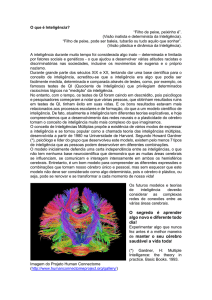
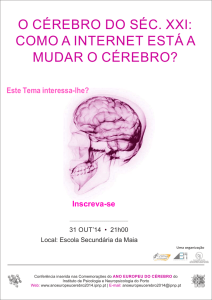
Para a localização da foice superior são utilizadas as
regiões P1 e P2, onde as duas saliências côncavas estão
posicionadas o mais próximo do topo da imagem. Entre essas
duas saliências, será considerada a saliência convexa
representando o ponto central da foice superior. Caso exista
mais de uma saliência convexa, será escolhida aquela mais
distante do topo da imagem. A Figura 2 mostra as duas
saliências côncavas e uma saliência convexa que representa a
posição aproximada da foice superior na imagem cerebral
analisada.
(c)
Fig. 1. Tomografia de um cérebro lesionado. (a) Imagem original;
(b) Mapa de bordas (g) dividido em 6 partes e (c) Imagem
limiarizada baseada em múltiplos limiares.
O processo de limiarização em multiníveis consiste em
obter valores de limiares adequados Li para cada região,
conforme apresentado na Seção II.B. A Tabela I mostra
alguns valores de parte do histograma ordenado extraído a
partir da região P1 da Figura 1.b. O valor Li selecionado é a
35th posição da tabela (Li=217), pois a diferença entre o nível
de cinza 217 e 7 é maior do que a diferença padrão (ß=20) e
é o menor valor entre os itens das linhas 35 e 34.
A Figura 1.c ilustra a imagem resultante a partir do
conjunto de limiares aplicados ao mapa de bordas. Os valores
de limiares utilizados foram 217, 224, 207, 216, 243 e 236
para as regiões P1 a P6, respectivamente.
TABELA I
Os valores de uma porção do histograma ordenado em
ordem decrescente da contagem dos pixels da região P1
da Figura 1.b.
Posição
Nível de cinza
0:
1:
2:
255
254
253
Contagem dos
pixels
6467
3750
956
Fig. 2. As saliências côncavas e convexas que são as referências
para identicar a foice cerebral superior.
O processo de obtenção da foice inferior é o mesmo, mas
as regiões P5 e P6 são utilizadas e o modo de localizar as
saliências é o inverso. Dessa forma, as duas saliências
convexas são obtidas e, posteriormente, a saliência côncava.
Um problema pode ocorrer quando existe mais de um
contorno contínuo na região superior ou inferior. Neste caso,
é analisado aquele com o maior número de pixels
conectados.
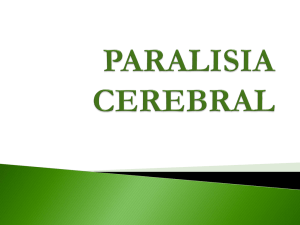
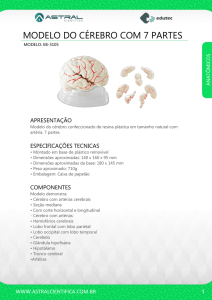
Uma vez que os pontos de referência superior e inferior
são encontrados, um segmento de reta é traçado passando por
estes dois pontos, resultando na LMC aproximada. A Figura
3 mostra a imagem cerebral original lesionada com a
sobreposição da imagem com as bordas afinadas e a LMC
traçada.
As próximas seções apresentam os resultados e as
conclusões deste trabalho.
IV. RESULTADOS
Esta seção apresenta os resultados experimentais do
método de identificação automática da foices cerebrais e da
LMC. Foram utilizados 3 conjuntos de exames cerebrais
reais produzidos por tomografia computadorizada,
totalizando 34 imagens de 512 x 512 pixels. O tempo médio
gasto para processar uma imagem foi de 1 min, o qual é
inferior aos tempos apresentados em alguns artigos da Seção
I.
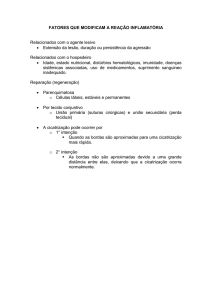
As imagens resultantes mostraram as bordas afinadas, as
saliências, as foices cerebrais superior e inferior e a LMC
aproximada traçada sobre a imagem cerebral original. As
Figuras 4.a até 4.e apresentaram os contornos internos do
cérebro contínuos, as foices superior e inferior e a LMC
aproximada identificadas satisfatoriamente.
O método proposto para identificar automaticamente a
LMC possui algumas lacunas em situações onde existem
descontinuidades dos pixels nos contornos que delimitam o
cérebro e outras bordas de tamanho médio que perturbam o
processo de detecção da LMC. Entretanto, os resultados
finais estão próximos dos resultados apresentados em [2], [5–
7], dando evidência da boa capacidade do método.
Com a detecção a linha média do cérebro de forma
automática, é possível usá-la em conjunto com outras
estruturas cerebrais e calcular o tamanho do desvio da linha
média em pacientes traumatizados. Esta medida é importante
para o neurologista tomar decisões sobre o tratamento mais
adequado nos casos de traumas craniencefálicos.
AGRADECIMENTOS
O trabalho realizado por Celia A. Z. Barcelos é
parcialmente apoiado pela pesquisa no CNPq - 308798/20066 e 474406/2006-7.
REFERÊNCIAS BIBLIOGRÁFICAS
Fig. 3. Imagem cerebral lesionada com a sobreposição da imagem
com as bordas afinadas identificadas e a linha média traçada.
Na seqüência, as Figuras 4.f até 4.j não apresentaram
resultados muito satisfatórios, pois apenas uma das foices foi
identificada na posição correta. Os problemas detectados
nestas imagens foram as descontinuidades das bordas
internas e outras bordas que não pertencem ao contorno do
cérebro, mas que atrapalham a correta localização das foices.
É importante observar que a LMC traçada está na posição
correta, porém ela está incompleta.
Finalmente, os resultados apresentados nas Figuras 4.k a
4.l possuem os mesmos problemas mencionados acima, além
de que nenhuma das duas foices cerebrais foi identificada
corretamente. A LMC traçada não está na posição
aproximada da LMC real, significando que estas situações
necessitam de ajustes e melhorias.
V. CONCLUSÕES
Apesar dos trabalhos relacionados usarem um número
maior de pontos de referência, este trabalho apresentou
resultados relevantes na identificação da linha média do
cérebro baseada apenas nas duas foices cerebrais.
[1] J. Talairach, P. Tournoux, Co-Planar Steriotaxic Atlas of
the Human Brain, Thieme Medical Publishers, 1988.
[2] P. Anbazhagan, A. Carass, P.L. Bazin, J.L. Prince,
“Automatic Estimation of Midsagital Plane and AC-PC
Aligment Based on Rigid Registration”, IEEE – ISBI,
pp. 828-831, 2006.
[3] A. Guimond, J. Meunier, J.P. Souc, “Automated
Detection of the Brain Intercommissural Line from
SPECT Data”, IEEE, EMBC and CMBEC, Theme 2
Imaging, 1995.
[4] L. Vérard, P. Allain, J.M. Travère, J.C. Baron, D.
Bloyet, “Fully Automatic Identi¯cation of AC and PC
Landmarks on Brain MRI Using Scene Analysis”, IEEE
Trans. on Medical Imaging, vol 16, pp. 610-616, 1997.
[5] Y. Liu, R.T. Collins, W.E. Rothfus, “Robust Midsagittal
Plane Extraction from Normal and Pathological 3-D
Neuroradiology Images”, IEEE Trans. on Medical
Imaging, vol. 20, pp. 175-192, 2001.
[6] L. Teverovskiy, Y. Liu, “Truly 3d Midsagittal Plane
Extraction for Robust Neuroimage”, 3rd IEEE
International Symposium on Biomedical Imaging Macro
to Nano, 2006.
[7] S. Prima, S. Ourselin, N. Ayache, “Computation of the
Mid-sagittal Plane in 3-D Brain Images”, IEEE Trans.
on Medical Imaging, vol 21, pp. 122-138, 2002.
[8] B.A. Ardekani, J. Kershaw, M. Braun, I. Kanno,
“Automatic Detection of the Mid-Sagittal Plane in 3-D
Brain Images”, IEEE Trans. on Medical Imaging, vol 16,
1997.
[9] C.A.Z. Barcelos, M. Boaventura, E.C. Silva Jr., “A
Well-Balanced Flow Equation for Noise Removal and
Edge Detection”, IEEE Trans. on Image Processing, vol
12, pp. 751-763, 2003.
[10] R. Gonzalez, R.E. Woods, Processamento de Imagens
Digital, Edgard BlÄucher Ltda., São Paulo, 2000.
Fig. 4. Resultados na identificação da LMC. (a)-(e) Resultados com as duas foices identificadas na posição correta; (f)-(l) Resultados com
apenas uma das foices identificada corretamente; (m)-(n) Nenhuma das duas foices foi identificada na posição correta.