Sistemas Operacionais
GERÊNCIA DO PROCESSADOR
MACHADO/MAIA: CAPÍTULO 08
Prof. Pedro Luís Antonelli
Anhanguera Educacional
Gerenciamento do Processador
A gerência do processador pode ser considerada a atividade mais
importante de um Sistema Operacional.
Geralmente temos 2 ou mais processos aptos a utilizar o
processador para serem executados.
Nesse instante, o sistema operacional deve decidir qual dos
processos aptos, armazenados em uma fila, será escolhido para
rodar primeiro.
Gerenciamento do Processador
Essa tarefa e a tomada de decisão é feita pelo escalonador de
processos (parte do sistema operacional) através da implementação
de alguns algoritmos de seleção, denominados algoritmos de
escalonamento.
Escalonador de processos
O escalonador é a entidade do sistema operacional responsável por
selecionar um processo apto a executar no processador e dividir o
tempo do processador de forma justa entre os processos que
estão aptos.
Em outras palavras, o objetivo dos escalonadores é implementar
uma política de escalonamento de processos.
Escalonador de processos
O sistema operacional possui um módulo responsável por efetuar a
troca de contexto entre a execução de processos distintos, chamado
de Dispatcher ( expeditor).
Já o escalonador está relacionado com a implementação e aplicação
das políticas de seleção adotadas.
Objetivos do escalonamento
1. Maximizar a utilização do processador ;
2. Privilegiar aplicações que são críticas;
3. Maximizar a produção do sistema ,com o maior número de
processos executados por unidade de tempo;
4. Minimizar o tempo de execução, ou seja, o tempo que um
processo gasta desde a sua criação até seu término;
Objetivos do escalonamento
5. Minimizar o tempo de espera, ou seja, o tempo que um processo
permance na lista de aptos ;
6. Minimizar o tempo de resposta, ou seja, o tempo decorrido entre
uma requisição e a sua realização.
Tipos de escalonadores
Existem 2 tipos de escalonadores:
1. Não-preemptivo: escalonadores que permitem que os
processos rodem até o fim de sua execução sem ser
interrompidos por eventos externos;
2. Preemptivo: escalonadores que são capazes de suspender
processos que poderiam continuar executando.
Tipos de escalonadores
Para cada um desses tipos, os processos poderão utilizar o
processador até que:
- No caso do tipo Não preemptivo:
1. Término de execução do processo;
2. Execução de uma requisição de entrada/saída ou sincronização;
3. Liberação voluntária do processador a outro processo.
Tipos de escalonadores
- No caso do tipo Preemptivo:
1. Término de execução do processo;
2. Execução de uma requisição de entrada/saída ou sincronização;
3. Liberação voluntária do processador a outro processo;
4. Interrupção de relógio;
5. Processo de mais alta prioridade esteja pronto para executar.
Algoritmos de escalonamento
Diversos mecanismos (algoritmos) foram sendo desenvolvidos ao
longo dos anos.
Cada um possui uma vantagem ou desvantagem, mas os escolhidos
são aqueles que oferecem um bom desempenho, ou seja, evitam ao
máximo o tempo de espera e mantém os recursos ocupados em
ambientes de processos heterogêneos
Algoritmos de escalonamento
Alguns algoritmos de escalonamento:
Algoritmos não preemptivos:
1. FIFO
2. SJF
3. Cooperativo
Algoritmos preemptivos:
1. Round robin (circular)
2. Múltiplas filas ( e suas variações )
Algoritmo escalonamento FIFO
O algoritmo FIFO (First in – First out) mais simples de implementar,
onde o processador possui uma fila associada para armazenar os
processos que estão aptos a executar.
Funcionamento:
1. Processos que se tornam aptos são inseridos no final da fila;
2. Processo que está no início da fila é o próximo a executar;
3. Processo executa até que:
a. Libere explicitamente o processador
b. Realize uma chamada de sistema (bloqueado)
c. Termine sua execução.
Algoritmo escalonamento FIFO
Não há preempção, ou seja, o próximo da fila só é atendido
quando o atual tiver encerrado todas as suas operações.
Algoritmo escalonamento FIFO
Desvantagem:O tempo médio de espera na fila de execução
depende a ordem:
Ex.
a. Ordem A-B-C-D = (0 + 12 + 20 + 35 ) / 4 = 16.75 u.t.
b. Ordem D-A-B-C = (0 + 5 + 17 + 25 ) / 4 = 11.7 u.t.
Algoritmo escalonamento SJF
No algoritmo anterior (FIFO) os processos que levam menos tempo
podem ser prejudicados se ficarem atrás dos que levam mais tempo.
Neste caso, o tempo médio que um processo espera para processar
pode ser muito grande.
O algoritmo pode ser modificado de forma que estes (os menores)
sejam processados antes, e com isto, o tempo de espera médio
diminui.
O Shortest Job First ou algoritmo do “Menor Processo Primeiro”
busca resolver este problema.
Algoritmo escalonamento SJF
Para usar este algoritmo precisamos conhecer antecipadamente o
tempo de execução de cada processo, o que é difícil.
A idéia é alocar o processador para o menor job da fila.
O fato é que o menor tempo médio é obtido quando se executa
primeiro os processos de menor ciclo de processador (I/O bound).
Algoritmo escalonamento Cooperativo
Nos algoritmos anteriores, os processos não podiam ser
preemptados por tempo máximo de processamento (timesharing).
Com a evolução, os computadores passaram a ser multi-usuário ou
multitarefa. Neste caso, uma maior interação com o usuário e uma
melhor utilização da CPU pelos programas tornou-se necessária.
O método cooperativo é uma forma de tornar isso possível.
Neste caso, os processos cooperam uns com os outros, passando a
CPU a um outro caso este seja necessário.
Algoritmo escalonamento Cooperativo
Uma forma de implementar este modelo é criando uma “fila ou caixa
de mensagens”, onde informações sobre os eventos ocorridos são
postadas.
Os processos verificam continuamente a caixa de mensagens,
retirando e processando as que são endereçadas a eles.
Os processos ou eventos do sistema geram novas mensagens, que
são colocadas no final da fila.
Algoritmo escalonamento Cooperativo
Se o processo perceber uma mensagem que não seja para ele,
chama o programa adequado, passando assim a CPU ao próximo.
Nas primeiras versões do Windows este sistema estava presente, e
se chamava Multitarefa cooperativa!
Algoritmo escalonamento RR
O algoritmo anterior, apesar de cooperativo, não garantia a execução
de todos os programas, já que eles não poderiam ser
obrigatoriamente parados ( não preemptivos).
Em sistemas de timesharing o tempo de CPU deve ser compartilhado,
sendo dada uma parcela de tempo a cada programa (time-slice).
Denominamos este intervalo de tempo de quantum.
Algoritmo escalonamento RR
Além disso, este algoritmo é similar ao algoritmo FIFO, pois também
mantemos uma fila, agora circular, para armazenar os processos.
Para a execução existe a necessidade de um relógio para delimitar as
fatias de tempo.
Algoritmo escalonamento RR
O processo perde o processador quando:
1. Libera explicitamente o processador;
2. Realize uma chamada de sistema (bloqueado);
3. Termina sua execução;
4. Quando sua fatia de tempo é esgotada.
Algoritmo escalonamento RR
Problema 1:
Dimensionar o quantum:
1. Compromisso entre overhead e tempo de resposta em função do
número de usuários;
2. Compromisso entre tempo de chaveamento e tempo do ciclo de
processador (quantum);
Imagine que a cada 20 ms de processamento útil seja necessário
gastar 5 ms com tarefas de troca de contexto para rodar processos
de outro usuário, por exemplo. Com isso, 20% do tempo de
processador será gasto com estes overheads.
Algoritmo escalonamento RR
Problema 1:
Dimensionar o quantum:
1. Compromisso entre overhead e tempo de resposta em função do
número de usuários;
2. Compromisso entre tempo de chaveamento e tempo do ciclo de
processador (quantum);
Imagine que a cada 20 ms de processamento útil seja necessário
gastar 5 ms com tarefas de troca de contexto para rodar processos
de outro usuário, por exemplo. Com isso, 20% do tempo de
processador será gasto com estes overheads.
Algoritmo escalonamento RR
Problema 2:
Processos I/O bound são prejudicados
1. Esperam da mesma forma que processos CPU bound porém
muito provavelmente não utilizam todo o seu quantum;
2. Solução: Estabelecer prioridades para os porcessos.
Escalonamento por Prioridades
Neste caso, cada processo tem uma prioridade associada (FIFO por
prioridade).
Quando um processo de maior prioridade entra na fila, ele passa na
frente, como num banco, onde os idosos tem a preferência.
A princípio, só existe preempção por prioridade, ou seja, os
processos não saem da CPU por sua fatia de tempo ter acabado.
Escalonamento por Prioridades
Este algoritmo é recomendado para sistemas de processamento em
tempo real, onde determinadas atividades ou processos tem
prioridade sobre os demais e devem ser tratados no momento em
que ocorrem.
Um problema que surge é o dos processos com menor prioridade
não serem nunca processados se existirem processos de maior
prioridade. Neste caso, o processo “morre de fome” (starvation).
Em alguns casos o Sistema Operacional pode mudar a prioridade dos
processos, minimizando este problema.
Escalonamento por Prioridades
1. Associar prioridades a processos I/O bound para compensar o
tempo gasto em estado de espera (apto);
2. Sempre que um processo de maior prioridade que o processo
atualmente em execução entrar no estado apto deve ocorrer
uma preempção;
3. Escalonamento com prioridades é inerente a preempção;
4. É possível haver prioridade não-preemptiva;
5. Escalonador deve sempre selecionar o processo de mais alta
prioridade.
Escalonamento por Prioridades
Prioridade estática versus dinâmica
Prioridade estática: Um processo é criado com uma determinada
prioridade e esta prioridade é mantida durante todo o tempo de
vida do processo;
Prioridade dinâmica: A prioridade do processo é ajustada de acordo
com o estado de execução do processo e/ou do sistema.
Ex.: ajustar a prioridade em função da fração do quantum que foi
realmente utilizada pelo processo q = 100 ms.
Processo A utilizou 2ms !nova prioridade = 1/0.02 = 50
Processo B utilizou 50ms !nova prioridade = 1/0.5 = 2
Escalonamento por Prioridades
Problemas com prioridades
1. Com prioridades um processo de baixa prioridade pode não
executar (starvation);
2. Um processo que durante sua execução troca de comportamento
(CPU bound a I/O bound) pode ficar mal classificado a nível de
prioridades e ser penalizado;
3. Solução: Múltiplas filas de prioridades
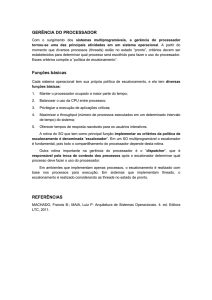
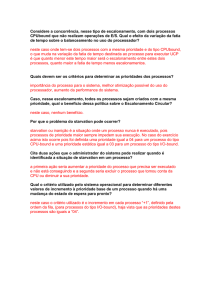
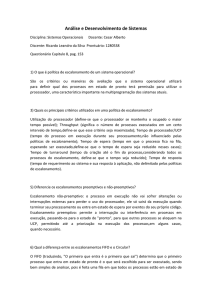
Escalonamento por Múltiplas Filas de Prioridades
Neste modelo temos diversas filas de processos no estado pronto, cada qual com
prioridades específicas e com sua própria política de escalonamento (FIFO, SJF, RR)
.
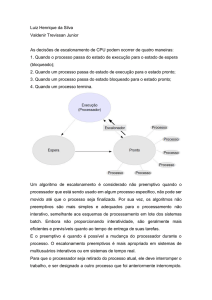
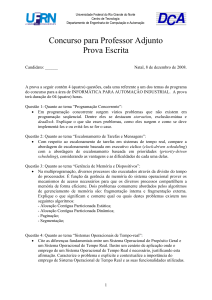
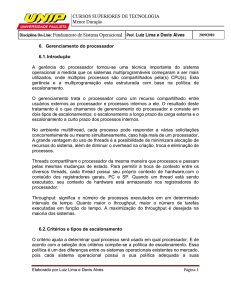
Escalonamento por Múltiplas Filas de Prioridades
com Realimentação
Este modelo é similar ao modelo de múltiplas Filas de Prioridades, porém os
processos podem trocar de fila durante seu processamento.
Um mecanismo adaptativo é implementado de forma a avaliar o comportamento
do processo e alterar sua fila.
Por exemplo, toda vez que um processo é “preemptado” por tempo ele muda de
fila, diminuindo sua prioridade e aumentando sua fatia de tempo (time-slice).
Características:
1. Baseado em prioridades dinâmicas;
2. Em função do tempo de uso da CPU a prioridade do processo aumenta e diminui;
3. Sistema de envelhecimento (aging) evita postergação indefinida.
Escalonamento por Múltiplas Filas de Prioridades
com Realimentação
BIBLIOGRAFIA
•
MACHADO, F. B. & MAIA, L. P., Arquitetura de Sistemas Operacionais, 4 Edição,
São Paulo, LTC, 2007.
•
TANENBAUM, A. S. Sistemas Operacionais Modernos: 2ª edição, São Paulo,
editora Prentice Hall, 2003.
•
SILBERSCHATZ, A. Sistemas Operacionais – Conceitos: São Paulo, editora LTC,
2004.