UNIVERSIDADE FEDERAL DE SANTA CATARINA
DEPARTAMENTO DE ENGENHARIA ELÉTRICA
Relatório:
Speedmaster
André Hallack Miranda Pureza
José Antonio Bressan Malavazi
Introdução
Neste documento apresentamos o relatório de andamento do projeto Speedmaster
(equipamento baseado em um sensor acelerômetro). Este equipamento apresentará duas
funções: medir o seu deslocamento a apresentá-lo em um Display e acionar um LED quando
a aceleração exceder um valor pré-estipulado. Apresentaremos aqui uma descrição inicial do
projeto, o cronograma, a motivação e uma discussão sobre possíveis aplicações.
Motivação
Este projeto está sendo elaborado inspirado no Speedmaster, um produto a venda
pela revista internacional de eletrônica Elektor. O Speedmaster (original), a venda, realiza a
medição da aceleração e do deslocamento em 3 dimensões, nosso objetivo será projetar um
circuito que realize funções similares a estas, porém algumas considerações serão feitas.
Para diminuir o custo do projeto e pelo fato de uma dimensão adicional não proporcionar
nenhum conceito novo ao circuito, nosso Speedmaster terá apenas 2 dimensões. Com intuito
de trabalharmos também com eletrônica não linear, substituiremos a medição da aceleração
nas diferentes dimensões pelo cálculo da aceleração absoluta e comparação deste valor com
outro pré-definido.
Descrição
O equipamento a ser desenvolvida pode ser dividido em 2 blocos de acordo com suas
funções: cálculo da aceleração absoluta e comparação com um valor pré-determinado e
medição do deslocamento.
O acelerômetro utilizado será de 2 dimensões, desta forma o deslocamento será
calculado para cada uma dessas dimensões (X e Y), ao passo que, no outro bloco, a
aceleração será calculada pela soma do quadrado das acelerações em cada direção.
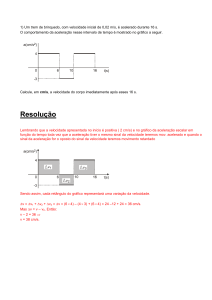
Medição do Deslocamento
O deslocamento do equipamento será medido a partir do conceito de que a
aceleração é igual à derivada no tempo da velocidade que por sua vez é a derivada da
posição. Realizando as operações inversas temos que se integrarmos duas vezes o sinal do
acelerômetro será obtido o deslocamento do mesmo. A seguir é realizada uma conversão do
sinal de saída analógico para digital para podermos apresentá-lo no Display. Segue abaixo o
diagrama do circuito:
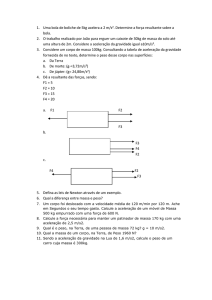
A função de integração pode ser implementada pela seguinte configuração, sendo V IN o sinal
de entrada e VOUT o de saída:
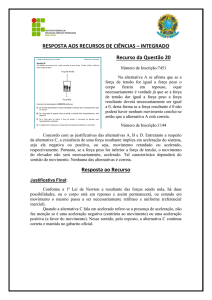
-Simulação
Foi simulado o seguinte circuito no software Isis:
15V
RE
U1:A
4.7F
3
1
R1
2
100k
4
C2
V1
8
100k
TL082
C1
390nF
RF
1.1M
-15V
O resistor RE tem como propósito reduzir os efeitos da corrente de polarização do
Amplificador Operacional e o Capacitor C2 filtra os sinais de tensão continua na entrada do
integrador.
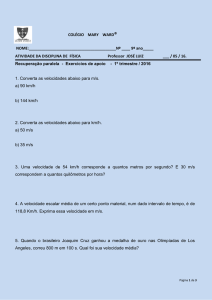
Para uma entrada de 2 Hertz foi obtido os seguintes sinais (amarelo – tensão de
saída, azul – tensão de entrada):
E para uma entrada de 550 Hertz:
Como é possível notar, o sinal de saída está apresentando um atraso de 90 graus em
relação ao sinal de saída, o que corresponde a integração de uma função senoidal. As
freqüências testadas cobrem os limites das freqüências de saída do sensor utilizado.
-Andamento
O mesmo circuito simulado foi montado (utilizando o Amp Op TL082) e logrou realizar
a operação de integração para uma entrada senoidal de 5 V para freqüências entre 1,7 e 350
Hertz (para freqüências acima desta região a relação sinal ruído se tornou muito alta).
Cálculo da Aceleração Absoluta e Comparação
Para calcularmos a aceleração absoluta do equipamento devemos somar os
quadrados das acelerações em X e em Y (seria necessário posteriormente tirar a raiz
quadrada deste valor se desejássemos obter o valor exato da aceleração, porém isso não
será necessário já que desejamos apenas comparar-la com um valor). A seguir será
realizada a comparação com um sinal de saída equivalente a uma aceleração “limite” que
acarreta no acionamento de um LED representando um Airbag ou dispositivo similar. Abaixo
mostramos um diagrama para este bloco:
Para a implementação da função não-linear de elevar ao quadrado devemos realizar a
operação de logaritmo, multiplicar a saída por dois e depois realizar o anti-logaritmo. O
logaritmo pode ser implementado utilizando-se um transistor e um amplificador como
mostrado no circuito abaixo (a operação inversa é similar):
Para se multiplicar a saída por dois utiliza-se o somador com apenas duas entradas
(V1 e V2) ambas conectadas ao mesmo ponto. O somador é mostrado abaixo:
O comparador é realizado como no circuito abaixo, onde a tensão de saída tem valor
positivo constante (saturada) quando V1>V2 e negativo constante (saturada) quando V1<V2.
-Simulação
Já que o circuito de elevação ao quadrado funciona apenas para sinais positivos, foi
elaborado um circuito que realiza a operação de módulo e sua implementação é mostrada
abaixo:
R15
R16
1K
1K
-15V
R13
2
1K
3
500
1K
U5
D1
D2
1N914
1N914
4
8
4
8
U6
R17
-15V
R14
U5(OP)
V=1.00139
2
6
6
7
1
7
1
3
LM108
C9
C8
300pF
ENTRADA
LM108
300pF
+15V
+15V
-1V
Simulando-o obtemos na saída a tensão de entrada em módulo (como desejávamos)
com um erro menor do que 1%.
O circuito de elevação ao quadrado elaborado é mostrado abaixo:
-15V
Q1
2N1711
-15V
Q2
U1
C1
R4
C3
U2
+15V
5
4
2N1711
20pF
R1
2
6
1.5M
3
2K
R2
4
8
300pF
1.5M
8
1
7
2
R6
6
3
80K
LM101A
R5
R9
10K
C2
1K
7
1
ENTRADA
0.8
+15V
LM108
C4
150pF
R3
4.5K
300pF
-15V
R11
+15V
-15V
R10
1K
R10(2)
V=0.626113
64K
+15V
U3
Q4
Q3
4
5
1.5M
C5
2
20pF
6
3
2N1711
2N1711
R12
2
2K
3
1.5M
7
1
8
6
7
1
8
R8
U4
4
5
R7
LM101A
LM101A
C6
C7
150pF
+15V
30pF
+15V
Os resultados obtidos nas simulações foram satisfatórios, para tensões entre 0V e
0.9V o erro se manteve inferior a 5%.
O circuito onde é somado os quadrados da aceleração em cada direção e comparado
com um valor limite de aceleração aceitável é mostrado abaixo:
R3
10k
-15V
R1
10k
Entrada 2 Y
R2
11
Entrada 1 X
11
-15V
U1:A
U2:A
2
2
1
1
3
3
R4
10k
4
10k
D1
LED-BLUE
4
LM324
LM324
ACELERACAO LIMITE
0.9V
+15V
+15V
Este foi simulado e apresentou os resultados esperados, somando ambas as tensões
e comparando-as com a tensão teste.
-Andamento
Os circuitos (um para cada dimensão) de que calculam o módulo da tensão de
entrada do sensor foram montados utilizando o LM324 (4 amplificadores Operacionais)
efetuando sua função perfeitamente.
A função de potenciação ao quadrado para ambas dimensões também foram
implementadas, utilizando para os Amp Ops o TL064 e para os transistores o CI 3048. Seus
resultados também foram satisfatórios, como mostrado na tabela abaixo:
Tensão de Entrada (V) Tensão de Saída (V)
0.2
0,040127
0.25
0,065071
0.3
0,093268
0.35
0,127973
0.4
0,167015
0.45
0,210396
0.5
0,260284
0.55
0,312341
0.6
0,370905
0.65
0,433806
0.7
0,496708
0.75
0,563948
0.8
0,637695
0.85
0,712527
0.9
0,791697
Aplicações
Sistema Conjunto de Navegação com o GPS: Quando o sinal de GPS não está
disponível um acelerômetro pode ser utilizado para determinar o deslocamento
do usuário.
Alarme de Carro: Um equipamento como o deste projeto pode detectar se o
carro está movendo sem ter sido ligado pelo proprietário.
Airbags: Airbags são acionados quando é detectada uma aceleração muito
grande.