Introduç
Introdução
• O desempenho de um programa depende:
Organização e Arquitetura
de computadores
– Número de instruções (depende do set de instruções)
– Velocidade de clock (depende da implementação)
– CPI - Número de ciclos gastos por instrução (depende da
implementação do ISA)
• Implementação do MIPS simplificada:
O processador: o caminho de dados e o
controle
– Intruções de referência à memória (lw e sw)
– Instruções lógicas e aritméticas (add, sub, and, or, slt)
– Instruções de controle de fluxo (saltos) beq e j
• lw $t1, offset($t2)
– Load word
– $t1 = valor armazenado na posição de memória $t2 + offset
Prof. Dr. Luciano José Senger
• sw $t1, offset($t2)
– Store word
– posição de memória [$t2 + offset] = $t1
• Beq $t1, $t2, endereço
– Branch if equal (salte se igual)
Introduç
Introdução
Uma sinopse da implementaç
implementação
• Implementação simplificada
• Todas as instruções do conjunto de instruções têm os dois
primeiros passos idênticos:
– Diretrizes:
• Torne o caso comum mais rápido
• A simplicidade favorece a regularidade
– As demais instruções podem ser implementadas com
princípios semelhantes
– A arquitetura do conjunto de instruções influencia os
aspectos de implementação: instruções mais simples
necessitam de uma implementação também mais
simples
• Memória
– Inicialmente as memórias de programa e controle
separadas
Uma visão abstrata da implementaç
implementação do
subconjunto MIPS mostrando as unidades
funcionais principais e as conexões principais
– Enviar o valor armazenado no PC para a memória de programa e
buscar a instrução dessa memória
– Ler um ou dois registradores, usando os campos de instrução para
selecionar os registradores a serem lidos. Para a instrução load
word, precisamos ler apenas um registrador, mas a maioria das
outras instruções exige a leitura de dois registradores
• Mesmo entre diferentes classes de instruções, há algumas
semelhanças:
– Todas as classes utilizam a UAL após a leitura dos registradores:
• Instruções de referência à memória: efetuar o cálculo do endereço
• Instruções aritméticas e lógicas: efetuar a operação
• Desvios condicionais: efetuar comparação (subtração)
• Após usar a UAL, as ações necessárias diferem
– Referência a memória: escreve dado na memória
– Instrução aritmética: escreve dado no registrador
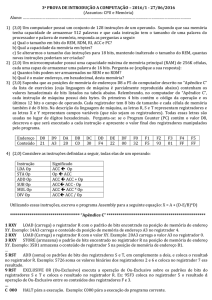
Multiplexador ou seletor de dados
• Barramento de controle
– Operações devem ser selecionadas através de
multiplexadores
– Circuito com 2n linhas de entrada, n linhas de controle e
1 saída
– Seleciona uma única saída a partir de várias entradas,
sendo a entrada escolhida é copiada para a saída
Visão abstrata:
S2
S1
F
D0
0
0
D0
D1
MUX
0
1
D1
D2
4-para-1
1
0
D2
1
1
D3
D3
S2 S1
F
A implementaç
implementação bá
básica do subconjunto MIPS
incluindo as linhas de controle e os multiplexadores
necessá
necessários
Método de temporizaç
temporização (clocking)
clocking)
• Clocking
– Define quando os sinais podem ser lidos e quando
podem ser escritos
– Evita circunstâncias onde um sinal é lido ao mesmo
tempo que o mesmo sinal foi escrito; a leitura pode
retornar o valor antigo, o valor recente ou uma
combinação entre os dois
• Sincronização acionada por transição
Visão abstrata:
A ló
lógica combinacional, os elementos de estado e o
clock relacionados
• Em um sistema digital síncrono, o clock determina quando os
elementos de estado escreverão valores no armazenamento interno.
Todos os elementos que apresentam um estado, como a memória, são
considerados acionados por transição
– Significa que quaisquer valores armazenados em um
elemento lógico seqüencial são atualizados apenas em
uma transição de clock
– Como apenas os elementos de estado podem armazenar
valores de dados, qualquer coleção de lógica
combinatória precisa ter suas entradas vindo de um
conjunto de elementos de estado e suas saídas escritas
em um conjunto de elementos de estado
Construindo o caminho de dados
• Elementos principais do caminho de dados
– PC, memória de instruções e somador
• O método acionado por transição permite que um elemento de estado
seja lido e escrito no mesmo ciclo de clock sem criar uma disputa que
poderia levar a valores de dados indeterminados. O período de clock
necessita ser longo o suficiente para que os valores de saída
estabilizem
Construindo o caminho de dados
• Banco de registradores
– Devido às instruções de formato R terem três operandos de registrador,
precisamos ler duas words de dados do banco de registradores e escrever
uma word de dados no banco de registradores.
– 3 entradas de 5 bits (32 registradores):
• 2 entradas com endereço dos registradores lidos
• 1 entrada com endereço do registrador escrito
– 2 saídas de 32 bits: operandos p/ a UAL
– 1 entrada de 32 bits: escrita do resultado
• As escritas são controladas pelo sinal de controle de escrita, que precisa estar
ativo para que um escrita ocorra na transição do clock
Construindo o caminho de dados
• Instruções do formato R
– Executa a operação (op and funct) utilizando como
operandos os valores em rs e rt
– Armazenam o resultado no banco de registradores (no
endereço rd)
– Todas as intruções do tipo R precisam
• Ler dois registradores
• Realizar uma operação na UAL com os conteúdos dos
registradores
• Escrever o resultado em um registrador
• Instruções aritméticas lógicas: ADD, SUB, AND, OR
• Ex: add $t1, $t2, $t3
31
R-type: op
25
rs
20
15
rt
rd
10
5
shamt funct
0
Construindo o caminho de dados
Construindo o caminho de dados
• Instruções de load/store
• A instrução beq
– lw $t1, offset($t2) e sw $t1, offset($t2)
– Calculam um endereço de memória somando o registrador base
($t2 no exemplo) ao número de 16 bits sem sinal estendido
– Para sw, o valor a ser armazenado na memória de dados é lido do
registrador; para lw: o valor é lido da memória de dados e escrito
no registrador
– É necessária uma unidade para estender o sinal de 16 para 32 bits e
uma memória para ler e escrever os dados
– Tem três operandos
• Dois registradores utilizados para a comparação
• Offset indicando o endereço de memória para o deslocamento
(PC + offset)
– Instruções de desvio
• O conjunto de instruções especifica que a base para o cálculo do
endereço de desvio é o endereço da instrução seguinte ao
desvio. Como calculamos PC + 4 no caminho de dados para a
busca de instruções, é fácil usar esse valor como a base para
calcular o endereço de destino do desvio.
• A arquitetura é especificada de forma que o campo offset é
deslocado 2 bits para a esquerda de modo que seja uma offset
de uma word; essa forma de cálculo aumenta a amplitude do
salto por um fator igual a 4
Construindo o caminho de dados
Construindo o caminho de dados
• A instrução beq
• Operações lógicas e de acesso à memória
– Além de calcular o endereço do desvio, é necessário verificar se o
desvio deve ser executado ou não, de acordo com a comparação
entre os dois registradores
– Assim, o caminho de dados do desvio precisa de duas operações:
• Calcular o endereço de destino do desvio
• Comparar o conteúdo do registrador (sinal zero da UAL)
– Semelhantes, com as diferenças principais:
• As instruções lógicas e aritméticas usam a ALU com as entradas
vindas de dois registradores; as instruções de acesso à memória
também podem usar a ALU para fazer o cálculo do endereço, embora
a segunda entrada seja o campo offset de 16 bits com o sinal estendido
da instrução
• O valor armazenado em um registrador de destino vem da ALU (para
um instrução do tipo R) ou da memória (para um load)
Construindo o caminho de dados
Um esquema de implementaç
implementação simples
• Integrando os caminhos de dados
• Projeto de ciclo único: a busca, decodificação e execução
das instruções ocorre em um único ciclo de clock
– Os caminhos de dados são unidos e linhas de controle são
adicionadas, assim como os multiplexadores necessários
– Nenhum recurso do caminho de dados pode ser usados mais de
uma vez por instrução, de forma que aqueles que necessitam ser
utilizados mais de uma vez devem ser replicados (p.e. memória de
instruções e de dados separados, mais de um somador)
– multiplexadores nsão necessários na entrada dos componentes
compartilhados para realizar a seleção
– Sinais de escrita para controlar a gravação no banco de
registradores e na memória de dados
• O tempo de ciclo é determinado pelo tamanho do caminho
mais longo (caminho com maior tempo de execução)
Um esquema de implementaç
implementação simples
Um esquema de implementaç
implementação simples
• Acrescentando o controle
• Acrescentando o controle
– O controle da ALU
– O controle de ALU
• Dependendo da instrução, uma das operações abaixo deverá
ser executada
• Aritméticas e lógicas (and, or, sub, add, slt)
• Load/store (add para cálculo do endereço)
• BEQ (subtração)
Entrada de controle da UAL
Função
0000
AND
0001
OR
0010
Soma
0110
Subtração
0111
Set less than
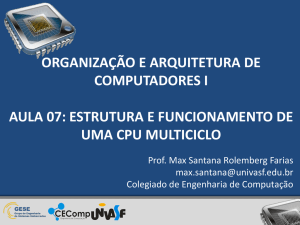
• Podemos gerar a entrada do controle da ALU de 4 bits usando
uma pequena unidade de controle que tenha como entradas o
campo funct da instrução e um campo control de 2 bits, que
chamamos de OpALU.
• OpALU indica:
– 00 : add para load/stores
– 01: sub para beq
– 10: determinada pela operação do campo funct
Um esquema de implementaç
implementação simples
Um esquema de implementaç
implementação simples
• Controle da ALU
• Controle da ALU
– Criar 2 bits de controle, que juntamente com o campo funct,
definem a função.
– Entradas UALOp1 e UALOp2:
– A partir dos valores de entrada e saída, pode-se criar
um sistema que mapeie o subconjunto de valores
possíveis para uma saída correta de controle para a
ALU
– Tabela verdade reduzida
• 00: loads e stores (soma endereços)
• 01: beq
• 10: a função é determinada pelo campo de função
Código de
operação da
instrução
UALOp
Operação da
Instrução
Campo
funct
Ação da ALU
desejada
Entrada de
controle da
ALU
LW
00
load word
XXXXXX
soma
0010
SW
00
store word
XXXXXX
soma
0010
BEQ
01
branch equal
XXXXXX
subtração
0110
Tipo R
10
add
100000
soma
0010
Tipo R
10
subtract
100010
subtração
0110
Tipo R
10
AND
100100
and
0000
Tipo R
10
OR
100101
or
0001
Tipo R
10
set less than
101010
set less than
0111
Campo funct
OpALU
Operação
OpALU1
OpALU2
F5
F4
F3
F2
F1
F0
0
0
X
X
X
X
X
X
0010
X
1
X
X
X
X
X
X
0110
1
X
X
X
0
0
0
0
0010
1
X
X
X
0
0
1
0
0110
1
X
X
X
0
1
0
0
0000
1
X
X
X
0
1
0
1
0001
1
X
X
X
1
0
1
0
0111
Um esquema de implementaç
implementação simples
Um esquema de implementaç
implementação simples
• Projetando a unidade de controle principal
• O caminho de dados com todos os
multiplexadores necessários e todas as linhas de
controle identificadas
– Formatos de instrução considerados
•
•
•
•
•
op
rs
rt
rd
shamt
funct
31-26
25-21
20-16
15-11
10-6
5-0
op
rs
rt
endereço
31-26
25-21
20-16
15-0
op
rs
rt
endereço
31-26
25-21
20-16
15-0
R
LW/SW
BEQ
Campo de opcode (bits 31-26)
Os dois registradores a serem lidos (rs e rt): posições 25-21 e 20-16 (tipo R, BEQ e store
word)
Registrador-base para instruções de load e store: está na posição 25-21 (rs)
16 bits de deslocamento do BE, lw e sw: 15-0
Registrador destino:
– Para lw: 20-16 (rt)
– Tipo R: 15-12 (rd)
– É necessário um multiplexador antes do banco de registradores
Um esquema de implementaç
implementação simples
Um esquema de implementaç
implementação simples
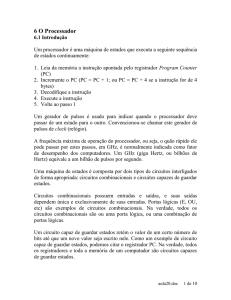
• Descrição dos sinais da unidade de controle
• Unidade de controle principal
– Os sinais podem ser definidos com base no campo
opcode, com exceção da linha de controle OrigPC
– Essa linha de controle dever ser ativada se a instrução
for beq e a ALU produzir o sinal Zero, usado para
comparação de igualdade
Instrução
RegDst
UALFonte
MemParaReg
EscReg
LerMem
EscMe
m
Branch
ALUOp1
ALUOp2
formato
R
1
0
0
1
0
0
0
1
0
lw
0
1
1
1
1
0
0
0
0
sw
X
1
X
0
0
1
0
0
0
beq
X
0
X
0
0
0
1
0
1
Um esquema de implementaç
implementação simples
Um esquema de implementaç
implementação simples
• Unidade de controle principal
• Exemplo 1: Add $t1, $t2, $t3
–
Passos para a execução de instruções R
1. Busca da instrução na memória de instruções e
incremento do PC
2. Dois registradores, $t0 e $t1, são lidos do banco de
registradores. A unidade de controle coloca valores
nas linhas de controle
3. A UAL opera sobre os dados lidos do banco de
registradores, usando o código da função (bits 5-0)
para gerar a função da UAL
4. O resultado da UAL é escrito no banco de
registradores usando-se os bits 15-11 da instrução
para selecionar o registrador-destino ($t1)
Um esquema de implementaç
implementação simples
Um esquema de implementaç
implementação simples
• Unidade de controle principal
• Exemplo 2: lw $t1, offset ($t2)
–
Passos para a execução de instruções LW/SW
1. Busca da instrução na memória de instruções e
incremento do PC
2. Leitura do conteúdo de um registrador ($t2) do
banco de registradores
3. Cálculo da soma do valor lido do banco de
registradores com o resultado da extensão do sinal
de 16 bits menos significativos da instrução
(deslocamento)
4. O resultado da soma é usado para endereçar a
memória de dados
5. O dado vindo da unidade de memória é escrito no
banco de registradores; o número do registradordestino é dado pelos bits 20-16 da instrução ($t1)
Um esquema de implementaç
implementação simples
Um esquema de implementaç
implementação simples
• Unidade de controle principal
• Exemplo 3: beq $t1, $t2, offset
–
Passos para execução de instruções BEQ
1. Busca da instrução na memória de instruções e
incremento do PC
2. Leitura do conteúdo dos registradores $t1 e $t2
3. Realização de uma subtração pela ALU sobre os
dois valores lidos do bando de registradores. O
valor de PC+4 é somado ao resultado da extensão
do sinal dos 16 bits menos significativos da
instrução (deslocamento) deslocado de dois bits à
esquerda. O resultado dessa soma é o endereço de
destino do desvio
4. A saída, Zero da ALU é usada para decidir se o PC
deve ser atualizado com o valor de PC+4 ou com o
valor do endereço de destino do desvio condicional
Um esquema de implementaç
implementação simples
Um esquema de implementaç
implementação simples
• Implementando jumps
• Implementando jumps
– A instrução jump se parece um pouco com uma
instrução branch, mas calcula o PC de destino de
maneira diferente e não é condicional
– Como um branch, os 2 bits menos significativos são
sempre 00; os próximos 26 bits mais significativos vem
do campo de 26 bits imediato da instrução
– Assim, pode-se implementar um jump armazenando no
PC a concatenação dos
• 4 bits superiores do PC atual + 4 (esses são bits 31:28 do
endereço da instrução imediatamente seguinte)
• O campo de 26 bits imediato da instrução jump
• Os bits 00
Um esquema de implementaç
implementação simples
Desempenho das má
máquinas de ciclo único
• Implementação de ciclo único
• Suponha os seguintes tempos de operação
– O projeto de ciclo único é ineficiente
– O clock precisa ter a mesma duração para cada instrução
nesse projeto e o CPI será sempre 1
– O tempo de ciclo é determinado pelo caminho mais
longo; esse caminho, certamente, é uma instrução lw,
que usa cinco unidades funcionais em série:
–
–
–
–
–
Memória de instruções
Banco de registradores
ALU
Memória de dados
Banco de registradores
– Embora o CPI seja 1, o desempenho geral de uma
implementação de ciclo único provavelmente não será
bom, já que outras instruções poderiam ficar em um
ciclo de clock mais simples
–
–
–
–
Unidade de memória: 200 ps
ALU e somadores: 100 ps
Banco de registradores: 50 ps
Considerando que os multiplexadores, a unidade de
controle, os acessos do PC, a unidade de extensão do
sinal e os fios não possuem atraso, qual das seguintes
implementações seria mais rápida e por quanto?
• Uma implementação em que toda instrução opera em 1 ciclo de
clock de uma duração fixa
• Uma implementação em que toda instrução é executada em 1
ciclo de clock usando um ciclo de clock com duração variável,
que para cada instrução, tem apenas a duração necessária
(método não prático)
Desempenho de má
máquinas de ciclo único
Desempenho de má
máquinas de ciclo único
• Solução
• Tempo exigido para cada classe de instruções
– Considerando o mix: 25% loads, 10% stores, 45% ALU,
15% desvios, 5% jumps
– Tempo de execução = Contagem instruções x CPI x Tempo de
ciclo
– Tempo de execução = Contagem instruções x 1 x Tempo de ciclo
– Tempo de execução = Contagem instruções x Tempo de ciclo
– Caminhos críticos
Desempenho de má
máquinas de ciclo único
Desempenho de má
máquinas de ciclo único
• Ciclo de clock
• Ciclo único
– determinado pela instrução mais longa, que leva 600ps
para ser executada:
Uma implementaç
implementação multiciclo
Uma implementaç
implementação multiciclo
• A visão de alto nível do caminho de dados multiciclo
• Problema da máquina de ciclo único
Cycle 1
Cycle 2
Clk
lw
– Como precisamos considerar que o ciclo de clock é
igual ao atraso de pior caso para todas instruções, não
podemos usar técnicas de implementação que reduzem
o atraso do caso comum: violação dos princípios de
projeto
– Na implementação de ciclo único, cada unidade
funcional precisa ser duplicada, o que eleva o custo de
implementação: o projeto de ciclo único é ineficiente no
desempenho e no custo
– Solução: utilizar uma implementação multiciclo, de
forma que as instruções possam utilizar mais de um
ciclo de clock para serem executadas, dependendo de
sua complexidade.
sw
Waste
• Na implementação multiciclo:
– Cada fase de execução da instrução em um ciclo
– Unidades funcionais podem ser compartilhadas, isto é, usadas
mais de uma vez por instrução
– Redução da quantidade de hardware necessário
• Principais vantagens do multiciclo:
– Instruções são executadas em quantidades diferentes de períodos
de clock (caso comum pode ser melhorado)
– Capacidade de compartilhar unidades funcionais (redução de
custo)
– Memória e ALU únicas
– Registradores RI e MDR (os dois valores são necessários no mesmo
ciclo de clock)
– Registradores A e B para armazenar os valores lidos no banco de
registradores (assim mais de uma leitura é possível por execução
de instrução)
– O registrador SaidaALU armazena a saída da ALU
Uma implementaç
implementação multiciclo
Uma implementaç
implementação multiciclo
• A visão de alto nível do caminho de dados multiciclo
• O caminho de dados multiciclo para o MIPS
manipular instruções básicas
– Como várias unidades funcionais são compartilhadas para
diferentes finalidades, multiplexadores adicionais devem ser
incluídos e os multiplexadores existentes devem ser expandidos
– A substituição das três ALUs do caminho de dados de ciclo único
por uma única ALU significa que esta precisa acomodar todas as
entradas que, antes, iam para as três ALUs diferentes:
• Um multiplexador adicional é incluído para a primeira entrada
da ALU, para escolher entre os registrador A e o PC
• O multiplexador na segunda entrada da ALU muda de duas
para quatro entradas: as duas entradas adicionais para o
multiplexador são a constante 4 (usada para incrementar o PC)
e o campo offset com sinal estendido e deslocado (usado no
cálculo do endereço do desvio)
Uma implementaç
implementação multiciclo
Uma implementaç
implementação multiciclo
• Unidade de controle principal
• O caminho de dados multiciclo com as linhas de
controle indicadas
– Implementação multiciclo exige um conjunto diferente de sinais de
controle:
•
•
•
•
•
PC, a memória, os registradores e o IR: sinal de escrita
Memória: sinal de leitura
UAL: mesmo controle da implementação monociclo
Multiplexador de 4 entradas: 2 linhas de controle
Todos os demais multiplexadores: uma linha de controle
– Para instruções jump e branch equal existem três fontes possíveis
para o PC:
• PC+4
• SaidaALU (desvio condicional)
• 26 últimos bits do IR acrescido de 2 zeros à direita, e concatenados
com os 4 MSB’s do PC
– Controle de escrita do PC:
• No incremento normal, e em um deslocamento incondicional, o PC é
escrito incondicionalmente
• Se for um desvio condicional, passa o valor de UALSaída, somente se
os registradores forem iguais
• Dois sinais de escrita: PCEsc e PCEscCond
Uma implementaç
implementação multiciclo
Uma implementaç
implementação multiciclo
• Unidade de controle principal
• Unidade de controle principal
– Ações dos sinais de controle de 1 bit:
– Ações dos sinais de controle de 1 bit:
– RegDst
– MemParaReg
• Inativo → O número do registrador-destino no banco de registradores vem do
campo rt
• Ativo → O número do registrador-destino no banco de registradores vem do
campo rd
– EscreveReg
• Inativo → Nenhum
• Ativo → O registrador de propósito geral selecionado pelo número do
registrador de escrita é atualizado com o valor da entrada Dado de Escrita
– OrigAALU
• Inativo → O primeiro operando da UAL é o PC
• Ativo → O primeiro operando da UAL vem do registrador A
– LerMem
• Inativo → Nenhum
• Ativo → O conteúdo da memória no endereço especificado na entrada
Endereço é colocado na saída Dado de saída
– EscreveMem
• Inativo → Nenhum
• Ativo → O conteúdo da memória no endereço especificado na entrada
Endereço é substituído pelo valor na entrada Dado a ser Escrito
• Inativo → O valor colocado na entrada Dado a ser Escrito do banco de
registradores vem de SaidaALU
• Ativo → O valor na entrada Dado a ser Escrito do banco de registradores do
MDR
– louD
• Inativo → O PC é usado para fornecer o endereço da unidade de memória
• Ativo → SaidaALU é usada para fornecer o endereço para a unidade de
memória
– IRWrite
• Inativo → Nenhum
• Ativo → A saída da unidade de memória é escrita no IR
– EscrevePC
• Inativo → Nenhum
• Ativo → O PC é atualizado. A fonte é controlada pelo sinal OrigPC
– EscrevePCCond
• Inativo → Nenhum
• Ativo → O PC é atualizado se a saída Zero da ALU também estiver ativa
Uma implementaç
implementação multiciclo
• Unidade de controle principal
– Ações dos sinais de controle de 2 bits:
– OpALU
Uma implementaç
implementação multiciclo
• Caminho de dados completo para a
implementação multiciclo juntamente com as
linhas de controle necessárias
• 00 – A UAL efetua uma operação de soma
• 01 – A UAL efetua uma operação de subtração
• 10 – O campo função da instrução determina a operação da UAL
– OrigBALU
• 00 – A segunda entrada da UAL vem do registrador B
• 01 – A segunda entrada da UAL é a constante 4
• 10 – A segunda entrada da UAL é a extensão de sinal dos 16 bits menos
significativos do IR
• 11 – A segunda entrada da UAL é a extensão de sinal dos 16 bits menos
significativos do IR deslocados 2 bits à esquerda
– OrigPC
• 00 – A saída da UAL (PC+4) é enviada ao PC para atualizar seu valor
• 01 – O conteúdo do UALSaída (o endereço-alvo do desvio condicional) é
enviado ao PC para atualizar seu valor
• 10 – O endereço-alvo do desvio condicional (IR[25-0]), deslocado 2 bits à
esquerda e concatenado com PC+4[31-28] é enviado ao PC para atualizar seu
valor
Uma implementaç
implementação multiciclo
Uma implementaç
implementação multiciclo
• Dividindo a execução da instrução em ciclos de
clock
• Dividindo a execução da instrução em ciclos de
– Ao organizar a execução em mais de um ciclo de clock
pode-se balancear a quantidade de trabalho realizada
em cada ciclo
– A organização da execução de cada instrução segue um
número de etapas, que depende do tipo da instrução
• As etapas deve ser realizadas de forma que cada passo
contenha apenas uma operação de ALU, um acesso à memória
ou um acesso ao banco de registradores
• Com essa restrição, o ciclo de clock pode ser tão curto quanto a
mais longa dessas operações
– Os registradores (p.e. A, B, MDR, SaidaALU)
armazenam dados para os próximos ciclos da mesma
instrução
clock
1. Busca da instrução
2. Decodificação da instrução e busca dos registradores
3. Execução, cálculo do endereço de memória ou
conclusão do desvio
4. Acesso à memória ou conclusão de instrução tipo R
5. Conclusão de leitura de memória
Uma implementaç
implementação multiciclo
Uma implementaç
implementação multiciclo
•
• Dividindo a execução da instrução em
ciclos de clock
Dividindo a execução da instrução em ciclos de clock
1.
Busca da instrução
•
•
•
2.
IR=Memória[PC]
PC=PC+4
Envio do PC para a memória como endereço, realização da leitura e
escrita da instrução no registrador de instruções.
Decodificação e busca dos registradores
•
•
•
•
•
•
Operações que podem depois ser descartadas após a decodificação
da instrução (ainda não se sabe qual instrução está no IR)
São executadas para evitar a perda de tempo durante a execução (por
exemplo ler rs e rt)
Carga dos registradores de entrada da ALU e do endereço de desvio
condicional (salvo em SaidaALU)
A = Reg[IR[25-21]];
B = Reg[IR[20-16]];
SaidaALU = PC + extensão de sinal (IR[15-0] << 2);
3. Execução, cálculo do endereço de memória ou
conclusão do desvio
a) Referência à memória
– SaidaALU = A + extensão de sinal IR[15-0]
b) Instrução aritmética ou lógica (tipo R)
– SaidaALU = A op B
c) Desvio condicional
– Se (A == B) PC = SaidaALU
d) Desvio incondicional
– PC = PC [31-28] || (IR[25-0]<<2
Uma implementaç
implementação multiciclo
Uma implementaç
implementação multiciclo
• Dividindo a execução da instrução em
ciclos de clock
4. Etapa de acesso à memória ou conclusão de
instrução tipo R
a) Referência à memória
MDR = Memória [SaidaALU];
ou
Memória [SaidaALU] = B;
b) Instruções aritméticas ou lógicas (tipo R)
Reg[IR[15-11]] = UALSaída;
5. Etapa de conclusão de acesso à memória (lw)
• Reg[IR[20-16]] = MDR
Definindo o controle
Definindo o controle
• Controle da implementação multiciclo pode ser
realizado
• O controle da máquina
de estados finitos
completo para o caminho
de dados
– Máquina de estados finitos (MEF)
– Microprogramação
• Máquina de estados finitos
– Visão de alto nível
Definindo o controle
• Os controles da máquina de estados finitos
normalmente são implementados usando um
bloco de lógica combinacional e um registrador
para conter o estado atual
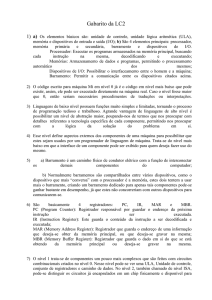
Desempenho da implementaç
implementação multiciclo
Single Cycle Implementation:
Cycle 1
Cycle 2
Clk
lw
sw
Multiple Cycle Implementation:
Clk
Waste
multicycle clock
slower than 1/5th of
single cycle clock
due to state register
overhead
Cycle 1 Cycle 2 Cycle 3 Cycle 4 Cycle 5 Cycle 6 Cycle 7 Cycle 8 Cycle 9Cycle 10
lw
IFetch
sw
Dec
Exec
Mem
WB
IFetch
R-type
Dec
Exec
Mem
IFetch
Controle de Exceç
Exceções
Controle de Exceç
Exceções
• Controle
• Como as exceções são tratadas
– Partes difíceis do controle é implementar exceções e interrupções, eventos
diferentes de desvios que mudam o fluxo de execução das instruções
– Exceção: evento inesperado de dentro do processador
• Exemplo: overflow aritmético
– Interrupção: evento que causa uma mudança inesperada no fluxo de
execução mas vem de fora do processador
• Frequentemente, exceções também são chamadas de interrupções (IA-32)
Tipo de evento
Origem
Terminologia MIPS
Requisição de dispositivo
de E/S
Externa
Interrupção
Chamada ao sistema
operacional pelo programa
do usuário
Interna
Exceção
Overflow aritmético
Interna
Exceção
Uso de uma instrução não
definida
Interna
Exceção
Mal funcionamento do
hardware
Ambas
Exceção ou interrupção
– A ação básica que a máquina precisa realizar quando ocorre uma
exceção é salvar o endereço da instrução problemática no contador
de programa para exceções (EPC) e transferir o controle para o
sistema operacional em alguns endereços especificados
– O sistema operacional pode então tomar uma ação apropriada, que
pode envolver fornecer algum serviço ao programa do usuário,
tomar alguma ação predefinida em resposta a um overflow ou
interromper a execução do programa e retornar um erro
– Depois de realizar qualquer ação necessária devido à exceção, o
sistema operacional pode terminar o programa ou continuar sua
execução usando o EPC para determinar onde reiniciar a execução
do programa
– O motivo da exceção e a instrução que a causou devem ser
informados ao sistema operacional
• Registrador de status
• Interrupções vetorizadas (o sistema operacional sabe a causa da
exceção pelo endereço que ela foi tratada)
Mapeando o controle em hardware
Microprogramaç
Microprogramação
• Função de controle
• Projeto de controle com máquinas de estados
– Os sinais de controle são dependentes de:
• Que instrução está sendo executada
• Que passo está sendo realizada
– Usar as informações acumuladas para especificar uma
máquina de estado finito
• Especificar uma máquina de estado finito graficamente, ou
• usar microprogramação
– Adequado em processadores com um número de
estados moderado
– No caso de conjunto de instruções mais complexo,
torna-se difícil implementar o controle através de
máquinas de estado
• Muitos estados e muitas transições são necessárias, dependo do
conjunto de instruções e do número de ciclos de clock por
instrução
• Projeto do controle por microprogramação
– Cada microinstrução define o conjunto de sinais de
controle que são aplicados no caminho de dados
– Sequenciamento:
• Execução sequencial é a padrão (sequenciador)
• Subrotinas podem ser implementadas
Microprogramaç
Microprogramação
Microprogramaç
Microprogramação
• Projeto do controle por microprogramação
• Formato de uma microinstrução para o MIPS
– Idéia básica: representar simbolicamente os valores
ativos das linhas de controle, de modo que o
microprograma seja uma representação das
microinstruções
• Formato de uma Microinstrução
– Define quantos campos e quais sinais de controle são
afetados por cada campo
– Deve-se simplificar a representação (se possível) e
dificultar a escrita de microinstruções inconsistentes
– Para se obter as microinstruções, devem ser observadas
os sinais de controle no caminho de dados
– Os sinais que não estão ativos ao mesmo tempo
compartilham o mesmo campo
Microprogramaç
Microprogramação
Microprogramaç
Microprogramação
• Implementação do microprograma
• Implementação do microprograma
– as microinstruções são armazenadas em uma ROM ou uma PLA
– Assim, cada microinstrução tem um endereço (endereços são
sequenciais)
• Métodos para escolha da próxima microinstrução a ser
executada:
1. Incrementar o endereço da microinstrução corrente (indicado por
“seq”)
2. Desviar para a microinstrução que começa a execução da próxima
instrução (indicada por “Busca”, corresponde ao estado 0 da
versão FSM)
3. Escolher a próxima microinstrução com base na entrada do bloco
de controle (indicada por “despacho”)
– São necessárias duas tabelas de despacho:
• Uma para despachar a partir do estado 1
• Uma para despachar a partir do estado 2
• Formato de microinstrução (I)
• Em geral, as operação de “despacho” são implementadas a
partir de uma tabela que
–
–
–
–
Contém os endereços das microinstruções-alvo
indexada pela entrada do bloco do controle
pode ser implementada em uma ROM ou uma PLA
Podem existir diversas tabelas de “despacho”
Microprogramaç
Microprogramação
Microprogramaç
Microprogramação
• Formato de microinstrução (II)
• Implementação do microprograma
– Busca da Instrução, incremento do PC (PC+4),
decodificação e cálculo do endereço-alvo (beq)
Microprogramaç
Microprogramação
Microprogramaç
Microprogramação
• Implementação do microprograma
• Despacho 1
– Busca da Instrução, incremento do PC (PC+4), decodificação e
cálculo do endereço-alvo (beq)
– Despacho
• Analogia com uma instrução case ou switch com o campo opcode e a
tabela de despacho 1 usada para selecionar uma de quatro sequências
de microinstruções diferentes
–
–
–
–
Mem1 para instruções de acesso a memória
Rformat1 para instruções do tipo R
BEQ1 para a instrução branch on equal
JUMP1 para a instrução jump
Microprogramaç
Microprogramação
Microprogramaç
Microprogramação
• Implementação do microprograma
• Implementação do microprograma
– Execução de LW/SW
– Tipo R
Microprogramaç
Microprogramação
Microprogramaç
Microprogramação
• Implementação do microprograma
• Microprograma completo
– Tipo R
Microprogramaç
Microprogramação
Microprogramaç
Microprogramação
• Implementação do microprograma
• Implementação
Microprogramaç
Microprogramação
Leituras recomendadas
• Vantagens:
Patterson, David A. e Hennessy, John L.
Organização e Projeto de Computadores: A
Interface Hardware/Software. Ed. LTC, 802. Ed.,
2004, Rio de Janeiro.
– Facilidade no projeto
– flexiblidade:
• Adaptável as mudanças na organização, temporização e tecnologia
• Pode ser modificada no final do ciclo de projeto ou mesmo em campo
– Pode implementar conjuntos de instruções bastante complexos:
apenas mais memória de microcontrole é necessária
– Generalidade:
• Pode implementar vários conjuntos de instruções na mesma máquina
• Pode ajustar o conjunto de instruções a aplicação
– Compatibilidade: muitas organizações, mesmo conjunto de
instruções
• Desvantagens
– Geralmente mais lento que o controle por máquinas de estados
– Atualmente, microprograma é armazenado internamente no CI
• Processadores modernos: hardwired para instruções
simples e microprograma para instruções complexas
(Pentium 4)