Curso de
DINÂMICA INVERSA DE SISTEMAS DE
CORPOS MÚLTIPLOS
Biomecânica do
Movimento
(BM332)
Biomecânica do Músculo Esquelético
• Os músculos esqueléticos são órgãos
constituídos por tecido excitável, capaz de
gerar tensão (muscular) de forma activa.
• Os músculos esqueléticos são por isso os
principais intervenientes na produção de
movimento e na manutenção de posturas
do corpo humano.
• A principal função do músculo esquelético
é transmitir aos ossos a que estão ligados
por intermédio de tendões, a força de
tracção muscular desenvolvida durante a
sua contracção.
• Devido ao braço-de-força associado a cada
músculo, a força muscular é convertida em
momento em torno das articulações por
eles atravessadas.
4º Ano
LEBMed
M. Silva, 2004
1º Semestre 2005 / 06
- 210 -
Curso de
DINÂMICA INVERSA DE SISTEMAS DE
CORPOS MÚLTIPLOS
Biomecânica do
Movimento
(BM332)
Propriedades do Músculo Esquelético
• Extensibilidade: Propriedade do músculo esquelético de
aumentar de comprimento.
• Elasticidade: Propriedade do músculo esquelético de
retornar ao seu comprimento inicial
após ocorrência de extensão ou de
contracção.
• Irritabilidade: Propriedade de responder activamente a
um estimulo (electroquímico ou
mecânico).
• Contractilidade: Propriedade do músculo de se tornar
mais curto, produzindo tensão muscular.
No entanto a tensão muscular pode ser
produzida sem que o músculo se torne
mais curto.
4º Ano
LEBMed
M. Silva, 2004
1º Semestre 2005 / 06
- 211 -
Curso de
Biomecânica do
Movimento
(BM332)
DINÂMICA INVERSA DE SISTEMAS DE
CORPOS MÚLTIPLOS
Tipos de Contracção de um Músculo Esquelético
• Estática: Contracção que não envolve movimento.
•Isométrica: Contracção muscular onde o músculo contrai sem
alterar o seu comprimento, i.e., mantendo a mesma métrica.
• Dinâmica: Contracção que envolve movimento articular.
•Isotónica: Contracção muscular onde o musculo contrai com uma
força de contracção aproximadamente constante, i.e., com o mesmo
tónus.
•Isocinética: Contracção muscular onde o músculo contrai com uma
força de forma a manter a velocidade angular das articulações
aproximadamente constante, i.e., com a mesma cinética.
• Concêntrica: Quando o músculo contrai diminuindo de comprimento.
• Excêntrica: Quando o músculo produz tensão muscular mas com o
aumento do seu comprimento.
4º Ano
LEBMed
M. Silva, 2004
1º Semestre 2005 / 06
- 212 -
Curso de
Biomecânica do
Movimento
(BM332)
DINÂMICA INVERSA DE SISTEMAS DE
CORPOS MÚLTIPLOS
Tarefas Desempenhadas pelos Músculos Esqueléticos
• Agonistas: O músculo causa movimento articular através de uma
contracção concêntrica. Num dado movimento podem haver vários
músculos agonistas.
• Antagonistas: O músculo desenvolve uma actividade que se opoe ao
movimento articular. Esta actividade serve para controlar ou parar um
dado movimento.
• Estabilizadores: A actividade muscular desenvolve-se no sentido de
estabilizar o movimento de uma articulação.
• Neutralizadores: A actividade muscular serve para neutralizar/anular
acções secundárias não desejadas de alguns músculos agonistas.
4º Ano
LEBMed
M. Silva, 2004
1º Semestre 2005 / 06
- 213 -
Curso de
DINÂMICA INVERSA DE SISTEMAS DE
CORPOS MÚLTIPLOS
Biomecânica do
Movimento
(BM332)
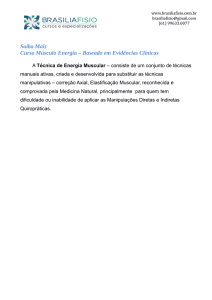
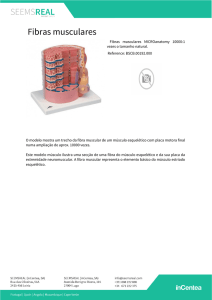
Anatomia e Fisiologia Muscular
Endomísio
Fascículo
Perimísio
Epimísio
Fibra Muscular
Banda I
(clara)
Sarcolema
Banda A
(escura)
Miofibrilha
Sarcómero
Músculo
Miofibrilha
Osso
Tendão
Terminal
Axónio Motor
Músculo Esquelético
Fibra Muscular
4º Ano
LEBMed
M. Silva, 2004
1º Semestre 2005 / 06
- 214 -
Curso de
DINÂMICA INVERSA DE SISTEMAS DE
CORPOS MÚLTIPLOS
Biomecânica do
Movimento
(BM332)
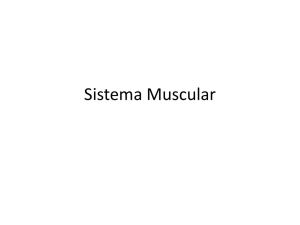
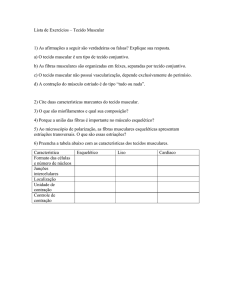
O Sarcómero – Unidade Funcional de Contracção
Linha Z
Linha M
Linha Z
Banda I
(clara)
Banda A
(escura)
Z – Zwitter – Meio
H – Helle – Claro
M – Middle - Médio
A – Anisotropico
I – Isotrópica
Sarcómero
Miofibrilha
Banda I
(clara)
Zona H
Banda I
(clara)
Banda A (escura)
Sarcómero
Cabeça da Miosina
Filamentos Actina (finos)
Filamentos de Miosina (grossos)
4º Ano
LEBMed
M. Silva, 2004
1º Semestre 2005 / 06
- 215 -
Curso de
DINÂMICA INVERSA DE SISTEMAS DE
CORPOS MÚLTIPLOS
Biomecânica do
Movimento
(BM332)
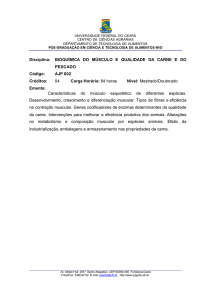
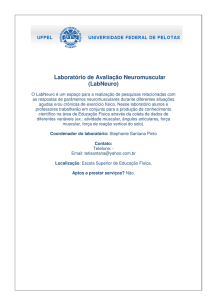
Activação muscular - Impulso Muscular
Motor Axon
Axon Terminals
Muscle Fibers
12
Superimposed twitches
Fused contraction
10
Motor Unit
Vesicles with
acetylcholine (ACh)
Axon Terminal
Acetylcholine
receptors
Synaptic cleft
Muscle fiber
Sarcomere
Neuromuscular Juntion
tw itch som m ation
Neuromuscular Juntion
5 Hz
10 Hz
20 Hz
50 Hz
8 stimulation stimulation stimulation stimulation
frequency
frequency
200
600
100 Hz stim freq
frequency frequency
6
4
2
0
0
400
800 1000 1200 1400 1600 1800 2000 2200 2400
time [ms]
4º Ano
LEBMed
M. Silva, 2004
1º Semestre 2005 / 06
- 216 -
Curso de
Biomecânica do
Movimento
(BM332)
DINÂMICA INVERSA DE SISTEMAS DE
CORPOS MÚLTIPLOS
Dinâmica do Tecido Muscular
Neural Signal
Activation
Dynamics
Muscle Activation
Muscle Contraction Muscle Force
Dynamics
Dinâmica do tecido muscular
• Dinâmica de Activação:
• Gera um estado no tecido muscular que transforma o sinal nervoso
em activação do aparelho contráctil.
a m (t ), l m (t ), l&m (t )
• Dinâmica de Contracção:
• Transforma a activação muscular
em força muscular.
• Utiliza-se um modelo muscular
matemático do tipo Hill para simular
a dinâmica de contracção muscular.
•Elemento contráctil de Hill (CE).
•Elemento passivo (PE).
Input
Contraction Dynamics
CE
F m (t )
F m (t )
Output
Output
PE
lm
Modelo Muscular do tipo Hill
4º Ano
LEBMed
M. Silva, 2004
1º Semestre 2005 / 06
- 217 -
Curso de
Biomecânica do
Movimento
(BM332)
DINÂMICA INVERSA DE SISTEMAS DE
CORPOS MÚLTIPLOS
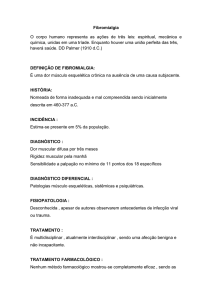
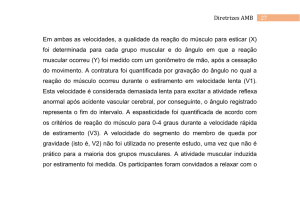
Dinâmica de Contracção Muscular
• Força Muscular Total:
Fm = FCE + FPE
Force [N]
2 F0
1.5 F0
• Força no Elemento Contráctil:
1
F0
-0.5
-0.5L& 0
0.5 F0
0
Fl m (l m (t )) Fl&m (l&m (t )) m
m
&
F (a (t ), l (t ), l (t )) =
a (t )
m
F0
m
CE
m
0.5L& 0
0.5
Velocity [m/s]
L&10
m
0
0.5 L0
1L0
1.5 L0
0
2 L0
Length [m]
Force [N]
• Fl and Fi representam a dependência
da força muscular do comprimento e
velocidade do CE.
2 F0
1.5 F0
1F0
-0.5
-0.5L& 0
0.5 F0
0
• Força no Elemento Passivo:
• Não depende da activação.
• Não desenvolve força até o músculo
passar o seu comprimento de repouso.
M. Silva, 2004
0.5L& 0
0.5
Velocity [m/s]
L&10
0
0.5L0
1L0
1.5 L0
0
2 L0
Length [m]
Força no elemento contráctil
e no elemento passivo
4º Ano
LEBMed
1º Semestre 2005 / 06
- 218 -
Curso de
Biomecânica do
Movimento
(BM332)
DINÂMICA INVERSA DE SISTEMAS DE
CORPOS MÚLTIPLOS
Exemplo de Aplicação - Salto
• Características do exercício:
• Indivíduo:
• Salto após passos de corrida.
• 23 anos, sexo masculino.
• 4 camâras de vídeo.
• 68.0 kg peso e 1.68 m altura.
• 1 plataforma de força.
• Com sapatos de ginástica.
CAM 1
CAM 2
CAM 3
CAM 4
Movimento 3D Reconstruído
4º Ano
LEBMed
M. Silva, 2004
1º Semestre 2005 / 06
- 219 -
Curso de
DINÂMICA INVERSA DE SISTEMAS DE
CORPOS MÚLTIPLOS
Biomecânica do
Movimento
(BM332)
Exemplo de Aplicação – Forças de Reacção no Chão
3000
Rz - f orce plat e
Rz [N]
Rz
• Resultados para as forças de
reacção relativamente elevados
quando comparados com as forças
envolvidas na marcha.
2500
2000
1500
1000
500
t [s]
0
0
0,08
0,16
0,24
0,32
• Erros de alisamento.
• Deriva do COP.
Rz - Vertical
300
0
[N]
200
-0,01
100
t [s]
0
-100 0
0,08
0,16
0,24
0,32
-200
Ry - f orce plat e
-400
Ry
Rx - f orce plat e
Rx
Rx - Anterior-posterior e Ry - Medial-lateral
M. Silva, 2004
0,02
0,04
0,06
COP x [m]
0,08
0,1
-0,02
-0,03
-0,04
-300
-500
0
-0,05
-0,06
COP y [m]
4º Ano
Deriva do COP
LEBMed
1º Semestre 2005 / 06
- 220 -
Curso de
Biomecânica do
Movimento
(BM332)
DINÂMICA INVERSA DE SISTEMAS DE
CORPOS MÚLTIPLOS
Exemplo de Aplicação – Forças Musculares Redundantes
Force [N]
Force [N]
Ilio p so as
800
B icep s f emo r is ( sho r t head )
500
400
600
300
400
200
200
0
0,00
100
0,08
0,16
0,24
0,32
0,40
0,48
0
0,00
0,08
Glut eus maximus
0,16
0,24
0,32
0,40
0,48
R ect us f emo r is
1000
1200
• Pedersen et al., 1987;
800
800
600
400
400
200
0
0,00
• Resultados comparaveis
com os apresentados por:
0,08
0,16
0,24
0,32
0,40
0,48
0
0,00
0,08
Glut eus med ius
0,16
0,24
0,32
0,40
0,48
V ast i muscles
1200
2500
1000
2000
800
• Pandy et al., 1990;
• Glitsch et al., 1997.
1500
600
1000
400
500
200
0
0,00
0,08
0,16
0,24
0,32
0,40
0,48
0
0,00
0,08
Glut eus minimus
0,16
0,24
0,32
0,40
0,48
0,32
0,40
0,48
0,32
0,40
0,48
Gast r o cnemius
• Sensibilidade à frequência
de corte.
2500
400
2000
300
1500
200
1000
100
0
0,00
500
0,08
0,16
0,24
0,32
0,40
0
0,00
0,48
0,08
0,16
Hip ad d uct o r s
1200
1200
1000
1000
800
800
600
600
400
400
200
0
0,00
0,24
So leus
200
0,08
0,16
0,24
0,32
0,40
0,48
0
0,00
0,08
Hamst r ing s
0,16
0,24
F lexo r hallucis lo ng us
500
1200
• Algumas oscilações nos
padrões de activação
muscular (apenas) em
alguns músculos.
400
Time [s]
800
300
Time [s]
200
400
100
0
0,00
0,08
0,16
Take off
0,24
0,32
0,40
0,48
0
0,00
0,08
0,16
0,24
Take off
0,32
0,40
0,48
4º Ano
LEBMed
M. Silva, 2004
1º Semestre 2005 / 06
- 221 -
Curso de
DINÂMICA INVERSA DE SISTEMAS DE
CORPOS MÚLTIPLOS
Biomecânica do
Movimento
(BM332)
Exemplo de Aplicação – Forças Musculares (Animação)
Visualização do aparelho muscular
utilizando o programa de simulação
APOLLO.
M. Silva, 2004
4º Ano
LEBMed
1º Semestre 2005 / 06
- 222 -