5.2. DINÂMICA
5.1.1.3
CAPÍTULO 5. MECÂNICA
Interpotente ou de classe 3
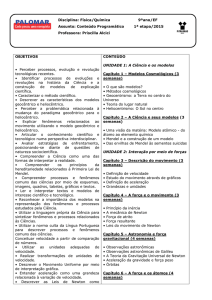
Uma alavanca é interpotente (ou de classe 3) quando força potente está entre o fulcro e a força
resistente.
Figura 5.6: O músculo bíceps
Este tipo de alavanca é de longe o mais comum no corpo humano. A sua vantagem mecânica é
sempre inferior à unidade (o braço da força potente é sempre menor que o braço da força resistente).
Logo nestas alavancas os músculos são obrigados a exercer grandes forças.
Então porque é que existem tantas alavancas de classe 3 no corpo humano?
• Os músculos estão construídos de forma a suportar grandes cargas (cerca de 70 N cm
2
[3]).
• O deslocamento que são capazes de produzir é pequeno em relação ao seu tamanho. Por exemplo,
um músculo bíceps com 25 cm de comprimento consegue diminuir de tamanho (quando contrai)
cerca de 7 cm (28%) [4]. Numa alavanca do tipo 3 perdemos na vantagem mecânica mas
ganhamos na amplitude de movimento (aumenta por um factor igual ao inverso da vantagem
mecânica).
• O corpo humano está desenhado para o movimento em detrimento da força. Os membros são
longos e por isso favorecem uma grande amplitude de movimentos. Na natureza, os animais que
têm mais força têm membros relativamente curtos.
5.2
Dinâmica
Parte da mecânica onde se estuda o movimento dos corpos assim como as forças que causaram esse
movimento.
Na mecânica clássica, a dinâmica rége-se pelas 3 leis de Newton.
5.2.1
Primeira lei de Newton (Lei da inércia)
Um corpo permanece no estado de movimento uniforme ou parado desde que não actuem forças sobre
ele.
Alguns exemplos:
• Quando um automóvel arranca (figura 5.7a) sentimos uma força que nos impele para trás. Na
realidade o que estamos a sentir é a oposição do nosso corpo à mudança de velocidade a que está
a ser sujeito. O nosso corpo está a tentar manter-se no estado original (parado). De igual modo
quando circulamos num automóvel a velocidade constante, ao travarmos (figura 5.7b) sentimonos impelidos para a frente. O nosso corpo tenta manter o movimento uniforme inicial. Esta
resistência à mudança chama-se inércia.
24
CAPÍTULO 5. MECÂNICA
5.2. DINÂMICA
a
b
Figura 5.7: Lei da inércia num automóvel
• Na figura 5.8 o corpo 2 não é actuado por forças logo (apesar do corpo 1 estar em contacto com
ele e actuado por uma força) irá manter-se em repouso desde que não haja atrito.
1
2
Figura 5.8: Exemplo da lei da inércia (sem atrito)
• Se um automóvel altera a direcção do seu movimento (por exemplo numa curva - ver figura 5.9),
mesmo que o módulo da velocidade se tenha mantido, o vector velocidade altera-se. Neste caso,
o nosso corpo tem tendência a manter a direcção original e sentimos uma força que nos impele
para a trajectória rectilínea (linha tracejada cinzenta).
Figura 5.9: Lei da inércia numa curva
5.2.2
Segunda lei de Newton (Princípio fundamental da dinâmica)
Um corpo de massa m actuado por uma força F~ tem um movimento acelerado com aceleração ~a tal
que:
~a =
F~
m
(5.5)
Dois exemplos:
• Dois corpos (1 e 2) têm igual massa mas estão sujeitos a forças diferentes (ver figura 5.10). Terá
maior aceleração o que estiver sujeito a uma força maior. Ou seja, a aceleração é directamente
proporcional à força aplicada. No caso da figura ||~a2 || > ||~a1 ||.
25
5.3. ENERGIA MECÂNICA
CAPÍTULO 5. MECÂNICA
2
1
Figura 5.10: Forças diferentes aplicadas a corpos da mesma massa
• Dois corpos (1 e 2) têm massas diferentes (m2 > m1 ) mas estão sujeitos a forças iguais (ver figura
5.11). Terá maior aceleração o que tiver menor massa. Ou seja, a aceleração é inversamente
proporcional à massa. No caso da figura ||~a1 || > ||~a2 ||.
2
1
Figura 5.11: Forças iguais aplicadas a massas diferentes
5.2.3
Terceira lei de Newton (Princípio da acção e reacção)
Quando se aplica uma força sobre um corpo este reage com uma força de igual intensidade e direcção
mas em sentido contrário.
Exemplo:
• Numa colisão quanto maior for a força de impacto da cabeça de uma pessoa no volante maior
será o dano provocado no crânio. A acção é a força aplicada pela cabeça no volante e a recção é
a força de resposta do volante sobre a cabeça. Ambas as forças têm igual intensidade e direcção
mas sentido oposto.
5.3
Energia mecânica
Um sistema mecânico pode ter energia sob a forma de movimento (energia cinética - EC ) ou sob a
forma de forças de interacção (energia potencial - EP ). A energia mecânica EM é a soma destas duas
formas de energia:
EM = EC + E P
(5.6)
A energia cinética deve-se ao movimento e é dada por:
EC =
1
mv 2
2
(5.7)
Sempre que há forças de interacção há energia potencial. Por exemplo, entre um corpo com massa
m e o planeta Terra existe uma interacção (atracção gravítica) logo há uma energia potencial gravítica:
EP = mgh
(5.8)
em que h é a altura do objecto em relação à origem do movimento. Esta expressão só é válida para
alturas muito inferiores ao raio terrestre (assume que o módulo do campo gravítico g é constante).
Vejamos um exemplo mais concreto: Um objecto é atirado na vertical com uma certa velocidade
inicial v0 . A partir do instante de saída a sua velocidade vai diminuir até atingir um ponto de altura
máxima. Quanto maior for o valor da velocidade inicial maior será o valor dessa altura. Se a velocidade
for superior a 40320 km h 1 o objecto não volta para baixo logo vamos assumir que a velocidade é
inferior a este valor.
26
Bibliografia
[1] Almeida, G. d. Sistema Internacional de Unidades (SI), grandezas e unidades físicas (Plátano
editora, S. A., 2002), 3 edn.
[2] (2010). URL http://www.bipm.org/en/si/.
[3] Davidovits, P. Physics in biology and medicine (Elsevier, 2008), 3 edn.
[4] Herman, I. P. Physics of the human body (Springer-Verlag Berlin, 2007), 1 edn.
35