Congresso de Inovação, Ciência e Tecnologia do IFSP - 2016
Uso do IRAMS10UP60B para Acionamentos de Máquina de Indução Trifásicas
VITOR S. PULGA1, PATRICK V. SPLENDORE2, RENAN P. BUENO3, ROGÉRIO V. JACOMINI4
1
Aluno do curso técnico em eletroeletrônica, Bolsista PIBIC-EM DO CNPQ, IFSP, Câmpus Hortolândia,
[email protected].
2 Aluno do curso técnico em eletroeletrônica, Bolsista PIBIC-EM DO CNPQ, IFSP, Câmpus Hortolândia,
[email protected].
3 Aluno do curso técnico em eletroeletrônica, Bolsista PIBIC-EM DO CNPQ, IFSP, Câmpus Hortolândia,
[email protected].
4 Professor EBTT e orientador do IFSP, Câmpus Hortolândia, [email protected].
Área de conhecimento (Tabela CNPq): Eletrônica Industrial – 3.040.501-7
Apresentado no
7° Congresso de Iniciação Científica e Tecnológica do IFSP
29 de novembro a 02 de dezembro de 2016 - Matão-SP, Brasil
RESUMO: Neste artigo é apresentado um sistema de controle de um motor de indução trifásico
(MIT) usando um circuito integrado de potência IRAMS10UP60B. Este módulo consiste de seis
transistores (IGBT´s) ligados em ponte inversora trifásica, de diodos de recuperação rápida (ultra-fast
recovery) para minimizar os efeitos de interferência eletromagnética (“EMI”), de circuitos de
acionamento dos transistores (drivers) com tempo morto e de um circuito de proteção térmica baseado
em um termistor (NTC). Este tipo de tecnologia apresenta a vantagem de não utilizar circuitos
adicionais, evitando a existência de trilhas de circuito impresso entre os CI’s de “driver” e os IGBTs
(discretos), com isso, reduzem-se sensivelmente o efeito das capacitâncias parasitas que surgem
devido à alta frequência de chaveamento. Aplicações que requer faixas de potência elevada torna-se
inviável, pois apresenta um alto custo de fabricação. Neste projeto inclui o desenvolvido dos circuitos
para os sensores, condicionamentos dos sinais PWM e medição de tensão e corrente. A estratégia de
controle adotada é o controle escalar usando a relação tensão e frequência V/f fixa em malha aberta,
que foi implementado no DSP-Texas TMS320F2812. Utilizou-se um kit de desenvolvimento chamado
de Starter Kit eZdsp da Spectrum Digital.
PALAVRAS-CHAVE: Motor de indução trifásico; Controle escalar; IRAMS10UP60B; Conversor
eletrônico de potência; IGBTs.
Using IRAMS10UP60B for Induction Machine Three-Phase Drives
ABSTRACT: In this paper presents a control system of a three-phase induction motor using an
integrated circuit IRAMS10UP60B power. This module consists of six transistors (IGBT's) connected
in three-phase inverter bridge, fast recovery diodes (ultra-fast recovery) to minimize the effects of
electromagnetic interference ("EMI"), the drive circuits of the transistors (drivers) with dead time and
a thermal protection circuit based on a thermistor (NTC). This type of technology has the advantage of
not using additional circuitry, avoiding the existence of printed circuit paths between IC's "driver" and
IGBTs (discrete) thereby are reduced significantly the effect of parasitic capacitances which arise due
the high switching frequency. Applications that require high power ranges becomes unviable, because
it has a high manufacturing cost. This project includes the developed circuits for sensors, conditioning
of PWM signals and measuring voltage and current. The adopted control strategy is the scalar control
using the link voltage and frequency V/f fixed open loop, which was implemented in the DSP-Texas
TMS320F2812. It was used a development kit called the Starter Kit eZdsp of the Spectrum Digital.
KEYWORDS: Three-phase induction motor; Scale control; IRAMS10UP60B; Electronic power
converter; IGBTs.
INTRODUÇÃO
Os inversores de frequência são formados por uma ponte trifásica de seis chaves eletrônicas,
que pode ser constituída tanto por MOSFET como IGBT. Para o correto funcionamento dessas chaves
são associados separadamente das chaves, os circuitos integrados que são conhecidos como “drivers”.
Esses circuitos recebem trens de pulsos para o acionamento das chaves. Os trens de pulsos mais usual
é a modulação por largura de pulso (MLP) (Da Silva, 2013).
Hoje com a evolução da tecnologia de fabricação de circuitos integrados, são construídos
módulos integrados de potência dedicados, como o IRAMS10UP60B, que consistem de seis
transistores (IGBT´s) ligados em ponte inversora trifásica, de diodos de recuperação rápida para
minimizar os efeitos de interferência eletromagnética, de circuitos de acionamento dos IGBT’s com
tempo morto e de um circuito de proteção térmica baseado em um termistor (International rectifier).
O uso do IRAMS10UP60B apresenta uma grande vantagem, que é a redução de custo por estar
relacionada à redução da quantidade de circuitos externos auxiliares necessários para o acionamento
das chaves de potência. Isso garante uma montagem mais compacta, focada na agregação de novas
funcionalidades e não no módulo de acionamento em si (Jeffey Kerr, LLC).
Neste artigo é apresentado o controle de um MIT usando o IRAMS10UP60B. Neste projeto
inclui o desenvolvido dos circuitos para os sensores, condicionamentos dos sinais PWM e medição de
tensão e corrente. A estratégia de controle adotada é o controle escalar usando usa a relação tensão e
frequência V/f fixa em malha aberta, que foi implementado no DSP-Texas TMS320F2812.
MATERIAL E MÉTODOS
O sistema de controle foi implementado usando um DSP-Texas TMS320F2812 da família
C2000 da Texas Instruments, específico para as aplicações em controle de motor. Utilizou-se um kit
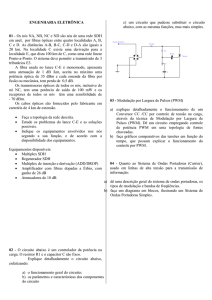
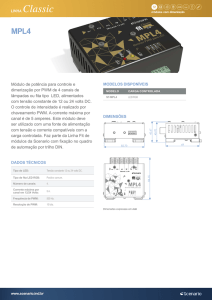
de desenvolvimento chamado de Starter Kit eZdsp da Spectrum Digital. O diagrama esquemático
implementado é mostrado na FIGURA 1, na qual apresenta os seguintes dispositivos:
IRAMS10UP60B, um retificador trifásico de tensão, filtro capacitivo, máquina de indução trifásica
gaiola de esquilo, um kit de desenvolvimento com DSP, circuito de sensores de tensão e corrente e
circuitos de condicionamento de sinais. Na FIGURA 2 apresenta a foto da bancada para o sistema de
controle usando o IRAMS10UP60B e do DSP-Texas TMS320F2812.
FIGURA 1: Sistema de controle implementado
Controle escalar em malha aberta do MIT
Neste trabalho é utilizada a estratégia de controle que usa a relação tensão e frequência V/f fixa
e predeterminada. Nesta estratégia adota-se um dos modelos mais simples de acionamento em malha
aberta de velocidade, onde a tensão de referência gerada Vs é obtida em função da velocidade desejada
(Pomilio).
Circuito do IRAMS10UP60B
O IRAMS10UP60B é um módulo integrado de potência do fabricante International Rectifier,
que tem uma tensão VCE máxima de 600V, corrente de fase máxima 10A eficaz e uma frequência
máxima de comutação do IGBTs de 20kHz. O circuito gate – drive no IRAMS10UP60B é interno, por
isso, não é necessário fazer grandes adaptações no circuito de comando, bastando apenas isolar os
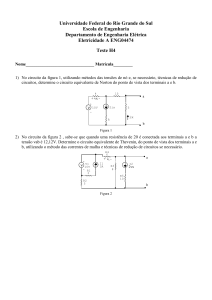
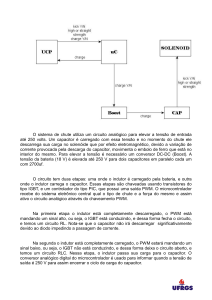
pulsos PWM provenientes do circuito de controle. Por conseguinte, foi desenvolvido um circuito para
o correto funcionamento do IRAMS, conforme mostrado na FIGURA 3. Este circuito foi construído
para permitir a interface dos pulsos PWM e tensão do elo CC e, dos pinos de tensão para alimentar o
MIT.
(a) Foto do sistema de controle implementado
FIGURA 2. Foto do sistema de controle implementado e do DSP.
(b) DSP
FIGURA 3. Circuito de controle do IRAMS10UP60B
Placas de condicionamento de sinais PWM
A placa de condicionamento é responsável por adaptar níveis de tensão de 3,3V dos sinais
PWM gerado pelo DSP e para os níveis de tensão de 15V para o comando dos IGBTs, assim como a
isolação desses sinais. Neste trabalho foi utilizado o optoaclopador HCLP-2231
Circuito de medição e condicionamento dos sinais de tensão e corrente
Para medir as tensões e corrente da MIT são utilizados sensores de efeito HALL. Os sinais
medidos pelos sensores de efeito Hall variam entre -15V e 15V. Portanto, é necessário um circuito de
condicionamento para mudar os níveis de tensão entre 0-3V, que são os níveis de trabalho do
conversor analógico-digital do DSP.
RESULTADOS E DISCUSSÃO
Nesta seção foram obtidos resultados dos sinais PWM e os sinais de tensão e corrente do
motor de indução utilizando a estratégia de controle escalar em malha aberta. O objetivo deste teste é
avaliar o funcionamento do IRAMS10UP60B no controle do motor de indução, para isto foi fixada
uma frequência de 60Hz, a frequência do sinal PWM é de 5kHz.
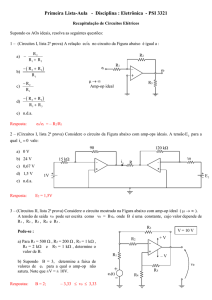
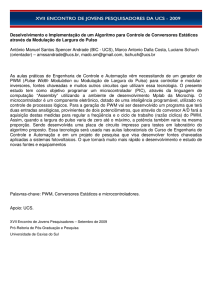
A FIGURA 4 apresenta os sinais PWM gerado pelo DSP e os sinais condicionados para
comandar os IGBTs. Na FIGURA 4 (a), verifica-se que um dos sinais PWM gerado pelo DSP está
com valor de tensão no nível alto de 3,3V, já o sinal que comanda o IGBT está com valor de 15V. Na
FIGURA 4 (b) apresenta dois sinais PWM para comandar um braço do inversor (dois IGBTs),
verifica-se que os sinais estão corretos ao estarem complementares. Nas FIGURAS 5 (a) e (b)
apresentam os sinais de tensão e corrente condicionados para o conversor analógico-digital do DSP,
conforme verificado no canal 1, no canal 2 apresenta os sinais obtidos dos sensores sem os ajustes de
offset. Verifica-se que a frequência de operação está em conformidade com a proposta, que é de 60Hz.
(a)
FIGURA 4. Sinais PWM.
(b)
(a) Tensão
(b) Corrente
FIGURA 5. Sinais da placa de medição e condicionamento dos sinais de tensão e corrente.
CONCLUSÕES
A partir dos resultados obtidos pode-se observar o correto funcionamento do controle do
motor de indução trifásico usando o IRAMS10UP60B. Verificou-se também o correto funcionamento
dos circuitos dos sensores, condicionamentos dos sinais PWM e medição de tensão e corrente. Com o
objetivo de validar esses circuitos adotou-se apenas o controle escalar em malha aberta, com operação
em velocidade fixa de 60Hz. Para trabalhos futuros, o controle será em malha fecha operando em
várias faixas de velocidade.
AGRADECIMENTOS
Agradecemos o apoio financeiro disponibilizado pelo CNPq para o desenvolvimento da
pesquisa.
REFERÊNCIAS
Da Silva, V. F. (2013). “Conversores eletrônicos de Potência”. Universidade Federal de
Itajubá, Itajubá – MG. Vol.1, No. 3; pp. 1 – 47.
Jeffey Kerr, LLC. “Application Note: A PIC-SERVO SC Based High - Power Servo
ControllerUsing the IRAMS10UP60B 3-Phase Driver”.
International rectifier, “Integrated Power Module for Appliance Motor Drives,” 2008.
Pomilio, J. A. “CONVERSORES PARA ACIONAMENTO DE MÁQUINA DE INDUÇÃO
TRIFÁSICA”. Eletrônica de Potência- Cap. 7